Область техники
Изобретение относится к бесплатформенным инерциальным навигационным системам (БИНС) и предназначено для определения пилотажно навигационных параметров движения, географических координат и параметров углового положения самолета в пространстве, и обеспечивает соответствующей информацией экипаж и другие системы комплекса пилотажно-навигационного оборудования.
Из уровня техники известны БИНС, например, системы Ltn-90 (производитель Northrop Grumman Guidance&Electronics Company, США), IRS (производитель Honeywell, США), а также выбранная в качестве прототипа система Ltn-101 (производитель Northrop Grumman Guidance&Electronics Company, США), состоящие из инерциального информационного моноблока и монтажной рамы, при этом корпус инерциального информационного моноблока вместе с крышкой выполнен в виде полого прямоугольного параллелепипеда с наружным оребрением стенок, внутри которого расположены блок чувствительных элементов (БЧЭ), прикрепленный к боковым стенкам с помощью амортизаторов, преобразователь сигналов датчиков, вычислитель инерциальной навигационной системы и источник вторичного питания, на торцевой стенке корпуса расположен электрический разъем.
Все указанные известные системы обладают следующими недостатками:
1. Выполнением чувствительных элементов в разных корпусах, что ведет к увеличению массо-габаритных параметров БИНС, а так же к необходимости соединения базовых поверхностей корпусов чувствительных элементов с кронштейном, обеспечивающим формирование блока чувствительных элементов, то есть к переходным поверхностям между взаимными ориентациями осей чувствительности этих элементов, которые вносят дополнительную нестабильность взаимной ориентации осей и, как следствие снижению точности системы.
2. Отсутствует доступ к технологическому разъему вычислителя инерциальной навигационной системы, что усложняет процесс плановой калибровки системы.
Настоящее изобретение предназначено для преодоления указанных выше недостатков уровня техники и обеспечивает достижение следующих технических результатов:
- Уменьшение массо-габаритных параметров БИНС при повышении точности формирования выходной информации системы.
- Упрощение доступа к технологическому разъему вычислителя инерциальной навигационной системы с целью упрощения процесса плановой калибровки БИНС.
Раскрытие изобретения
В соответствии с изложенным выше, предлагается изобретение, существенные признаки которого, перечисленные ниже, позволяют обеспечить преодоление существующих недостатков уровня техники и обеспечить достижение раскрываемых в данном описании технических результатов.
В соответствии с изобретением предлагается БИНС, включающая инерциальный моноблок, выполненный, по меньшей мере, с одной герметичной крышкой, и монтажную раму, снабженные фиксирующими элементами для закрепления моноблока на монтажной раме, при этом корпус моноблока имеет на наружной поверхности по меньшей мере одну ручку для переноса и перемещения моноблока в монтажной раме, а также соединительные элементы для электрической связи функциональных элементов БИНС с внешними устройствами, при этом упомянутые функциональные элементы размещены внутри инерциального моноблока и выполнены в виде связанных между собой БЧЭ, преобразователя сигналов датчиков, по меньшей мере, одного вычислителя, а также источника вторичного питания, при этом согласно изобретению внутренняя полость инерциального моноблока содержит разделенные перегородкой первый и второй отсеки, причем в первом отсеке установлен БЧЭ, выполненный в виде единого корпуса кубической формы с герметизируемыми с помощью крышек четырьмя полостями, при этом в трех взаимно ортогональных полостях расположены кольцевые лазеры прямоугольной формы с функциональной электроникой лазерного гироскопа, а в четвертой - высоковольтный источник напряжения, устройство регулирования периметра и контроля лазерных гироскопов, а также блок из трех акселерометров, размещенных в едином жестком корпусе, обеспечивающем при его закреплении в БЧЭ параллельность осей чувствительности акселерометров и кольцевых лазеров, при этом корпус БЧЭ закрыт снаружи магнитными экранами и снабжен амортизаторами для крепления к стенкам инерциального моноблока, а во втором отсеке установлены упомянутые источник вторичного питания, преобразователь сигналов датчиков и, по меньшей мере, один вычислитель, при этом в герметичной крышке инерциального моноблока выполнен герметично закрывающийся съемный люк.
Заявленный технический результат, заключающийся в уменьшении массо-габаритных параметров БИНС и повышению точности формирования ее выходной информации, достигается за счет выполнения корпуса моноблока двухсекционным с размещением всех чувствительных элементов в едином блоке БЧЭ с исключением упомянутых выше присущих прототипу переходных поверхностей.
При этом выполнение в крышке моноблока герметично закрывающегося съемного люка, - упрощает процесс доступа к технологическому разъему вычислителя инерциальной системы, обеспечивая, таким образом, снижение трудозатрат и времени на осуществление плановой калибровки БИНС.
В соответствии с предложенным изобретением предусматриваются следующие предпочтительные варианты исполнения БИНС:
1. Моноблок выполняется с двумя ручками, соединительным элементом в виде врубного разъема, а также фиксирующими элементами в виде трех центрирующих отверстий и двух упоров таким образом, что на внешней стороне задней стенки корпуса установлен врубной разъеа, выполнены первое и второе центрирующие отверстия, а на внешней стороне передней стенки корпуса расположены ручки, упоры и третье центрирующее отверстие. При этом монтажная рама указанного моноблока включает основание и прикрепленную к нему стенку, и выполнена с соединительным и фиксирующими элементами таким образом, что в стенку вмонтирован промежуточный соединитель, имеющий на внешней стороне стенки разъем для функционального соединения с внешними устройствами, при этом на внутренней стороне стенке также выполнены два направляющих штыря под упомянутые первое и второе центрирующие отверстия, на конце основания расположены направляющий штырь под упомянутое третье центрирующее отверстие и два тарированных элемента крепления моноблока для его фиксации на упомянутых упорах, на поверхности монтажной рамы выполнены направляющие для установки моноблока, а также четыре отверстия для его закрепления на платформе объекта, калиброванное отверстие и калиброванный паз для выставки инерциальной навигационной системы относительно строительных осей объекта.
2. Инерциальный моноблок выполняется с ручкой, фиксирующими элементами в виде направляющего штыря, двух крепежных болтов и упоров, а также соединительными элементами в виде электрического разъема источника вторичного питания таким образом, что на внешней стороне передней стенки корпуса установлен герметичный электрический разъем и ручка, на нижней части корпуса со стороны разъема параллельно боковым стенкам расположен направляющий штырь и крепежные болты, а на внешней стороне задней стенки корпуса перпендикулярно горизонтальной опорной поверхности установлены два упора. При этом монтажная рама указанного моноблока выполняется с фиксирующими элементами в виде центрирующего паза под упомянутый направляющий штырь и двух резьбовых отверстий под упомянутые крепежные болты, расположенными на передней стенке корпуса рамы, упорной планки с наклонной упорной поверхностью для фиксации упомянутых упоров, расположенной на задней стенке корпуса рамы перпендикулярно горизонтальной направляющей поверхности, а также, выполненных на широкой стороне корпуса рамы трех отверстий для закрепления рамы на платформе объекта и дополнительного калиброванного паза для выставки инерциальной навигационной системы относительно строительных осей объекта.
3. Инерциальный моноблок выполняется с двумя ручками, фиксирующими элементами в виде трех направляющих штырей и двух крепежных болтов, а также соединительными элементами в виде четырех герметичных электрических разъемов источника вторичного питания таким образом, что на внешней вертикальной поверхности передней стенки корпуса расположены две ручки и первый герметичный электрический разъем, а в нижней части этой стенки имеется дополнительная полость, закрытая планкой, на которой установлены второй, третий и четвертый герметичные электрические разъемы, при этом в нижней части передней стенки корпуса размещен первый направляющий штырь, а в нижней части задней стенки -второй и третий направляющие штыри, причем на передней стенке на уровне первого направляющего штыря расположены два крепежных болта. При этом монтажная рама указанного моноблока выполняется с фиксирующими элементами в виде трех центрирующих отверстий под упомянутые направляющие штыри, двух резьбовых отверстий под упомянутые крепежные болты, калиброванных паза и двух цилиндрических отверстий для закрепления рамы на платформе объекта и ее выставки инерциальной навигационной системы относительно строительных осей объекта, при этом на малых сторонах рамы выполнены центрирующие и резьбовые отверстия, а на широкой стороне расположены со стороны передней стенки моноблока первое калиброванное цилиндрическое отверстие и со стороны задней его стенки калиброванный паз и второе калиброванное цилиндрическое отверстие.
Для любого из указанных вариантов воплощения БИНС возможны следующие частные случаи осуществления изобретения:
- Магнитные экраны, закрывающие корпус БЧЭ, могут быть выполнены из пермаллоя;
- Крепление корпуса БЧЭ к стенкам инерциального моноблока целесообразно осуществлять четырьмя амортизаторами по два на двух противоположных стенках таким образом, что каждая пара амортизаторов расположена по ортогональным гипотенузам куба БЧЭ;
- Электронный отсек инерциального моноблока может дополнительно содержать коммутационную плату, на которую по направляющим корпуса с помощью разъемов и креплений установлены упомянутые преобразователь сигналов датчиков, вычислитель и источник вторичного питания, выполненные в виде отдельных субблоков.
При этом в электронном отсеке инерциального моноблока согласно первому варианту воплощения предложенной системы может быть дополнительно установлен сетевой преобразователь напряжения.
При этом первый и второй вариант воплощения БИНС предусматривает наличие у инерциального моноблока одной герметичной крышки, в которой выполняется герметично закрывающийся съемный люк, упрощающий доступ к технологическому разъему вычислителя.
Причем, во втором варианте крышка моноблока может быть дополнительно снабжена клапаном для герметизации и заполнения отсека БЧЭ осушенным азотом.
В третьем же варианте воплощения предложенной системы корпус моноблока выполняется с двумя герметичными крышками, одна из которых закрывает отсек блока электроники, а другая - отсек БЧЭ. При этом крышка отсека БЧЭ снабжена клапаном для герметизации и заполнения отсека осушенным азотом, а крышка отсека блока электроники - герметично закрывающимся съемным люком, с возможностью доступа к технологическому разъему вычислителя.
Кроме того, согласно третьему варианту воплощения предложенной системы, вычислитель выполняется из двух блоков: блока формирования инерциальной информации, управления преобразователем сигналов датчиков, встроенного контроля инерциальных подсистем и приема информации от спутниковой навигационной системы, а также блока комплексной обработки инерциальной и спутниковой информации и контроля достоверности спутниковой информации.
Кроме того, согласно третьему варианту воплощения предложенной системы, на коммутационной плате может быть дополнительно размещен модуль коммутации меток, либо приемо-измерительный блок спутниковой навигационной системы.
При этом в случае наличия последнего, на внешней вертикальной поверхности передней стенки корпуса моноблока выполняется соединительный элемент в виде высокочастотного разъема приемо-измерительного блока спутниковой навигационной системы.
Осуществление изобретения
Дальнейшее описание содержит отсылки на элементы чертежей (Фиг. 1-23), предназначенных для наглядного отображения сущности предложенного изобретения. Следует учитывать, что сведения, раскрытые на чертежах, предназначены лишь для иллюстрации предпочтительных вариантов осуществления и специалисту будут понятны другие возможные варианты осуществления предложенного изобретения.
На Фиг. 1-10 представлена БИНС, выполненная в соответствии с первым предпочтительным вариантом реализации изобретения, где:
11 - инерциальный моноблок;
21 - крышка;
31 - монтажная рама;
41 - отсек блока электроники;
51 - отсек БЧЭ;
61 - направляющие отсека блока электроники;
71 - крепления для фиксации функциональных элементов в отсеке блока электроники;
81 - преобразователь сигналов датчиков;
91 - вычислитель;
101- технологические разъемы вычислителя;
111 - источник вторичного питания;
12 - сетевой преобразователь напряжения;
131 - БЧЭ;
141.1, 141.2 - пермалоевые экраны;
151 - амортизаторы;
161 - крепежные элементы амортизаторов;
171 - кольцевые лазеры;
181 - блок акселерометров;
191- высоковольтный источник напряжения;
201 - устройство регулирования периметра и контроля;
211 - герметичный люк;
221 - врубной разъем;
231.1, 231.2 - центрирующие отверстия;
241 - ручки;
25 - упоры;
261 - основание монтажной рамы;
271 - стенка монтажной рамы;
281 - промежуточный соединитель БИНС с внешними устройствами;
291.1, 291.2 - разъемы промежуточного соединителя;
301.1, 301.2 - направляющие штыри;
31 - тарированные элементы крепления инерциального моноблока;
321 - направляющие монтажной рамы;
331 - отверстия для крепления монтажной рамы на платформе объекта;
341 - калиброванное цилиндрическое отверстие;
351 - калиброванный паз;
На Фиг. 5-8, 10-16 представлена БИНС, выполненная в соответствии со вторым предпочтительным вариантом реализации изобретения, где:
12 - инерциальный моноблок;
22 - крышка;
32 - монтажная рама;
42 - отсек блока электроники;
52 - отсек БЧЭ;
62 - направляющие отсека блока электроники;
72 - крепления для фиксации функциональных элементов в отсеке блока электроники;
82 - преобразователь сигналов датчиков;
92 - вычислитель;
102 - технологические разъемы вычислителя;
112 - источник вторичного питания;
132 - БЧЭ;
142.1 142.2 - пермалоевые экраны;
152 - амортизаторы;
162 - крепежные элементы амортизаторов;
172- кольцевые лазеры;
182 - блок акселерометров;
192- высоковольтный источник напряжения;
202 - устройство регулирования периметра и контроля;
212 - герметичный люк;
232.1 232.2 - центрирующие отверстия;
242 - ручка;
302 - направляющий штырь;
332 - отверстия для крепления монтажной рамы на платформе объекта;
361 - герметичный электрический разъем;
371 - крепежные болты;
38 - горизонтальная опорная поверхность моноблока;
39 - упоры;
401 - клапан;
41 - центрирующий паз;
421 - резьбовые отверстия;
43 - упорная планка;
44 - наклонная опорная поверхность монтажной рамы;
45 - направляющие.
На Фиг. 5-8, 17-22 представлена БИНС, выполненная в соответствии с третьим предпочтительным вариантом реализации изобретения, где:
13 - инерциальный моноблок;
33 - монтажная рама;
43 - отсек блока электроники;
53 - отсек БЧЭ;
63 - направляющие отсека блока электроники;
73 - крепления для фиксации функциональных элементов в отсеке блока электроники;
83 - преобразователь сигналов датчиков;
93 - вычислитель;
103 - технологические разъемы вычислителя;
113 - источник вторичного питания;
133 - БЧЭ;
143.1, 143.2 - пермалоевые экраны;
153 - амортизаторы;
163 - крепежные элементы амортизаторов;
173 - кольцевые лазеры;
183 - блок акселерометров;
193 - высоковольтный источник напряжения;
203 - устройство регулирования периметра и контроля;
213 - герметичный люк;
243 - ручки;
303.1, 303.2 - направляющие штыри;
333 - отверстия для крепления монтажной рамы на платформе объекта;
353 - калиброванный паз;
362.1, 362.2 - герметичные электрические разъемы;
372 - крепежные болты;
402 - клапан;
422 - резьбовые отверстия;
46 - крышка отсека блока электроники;
47 - крышка БЧЭ;
48 - горизонтальная планка;
49 - приемо-измерительный блок СНС;
50 - модуль коммутации меток;
51 - высокочастотный разъем;
52 - заглушка.
На Фиг. 1-10 представлена БИНС, выполненная в соответствии с первым предпочтительным вариантом реализации изобретения и состоящая из инерциального моноблока (11) с крышкой (21) и монтажной рамы (31).
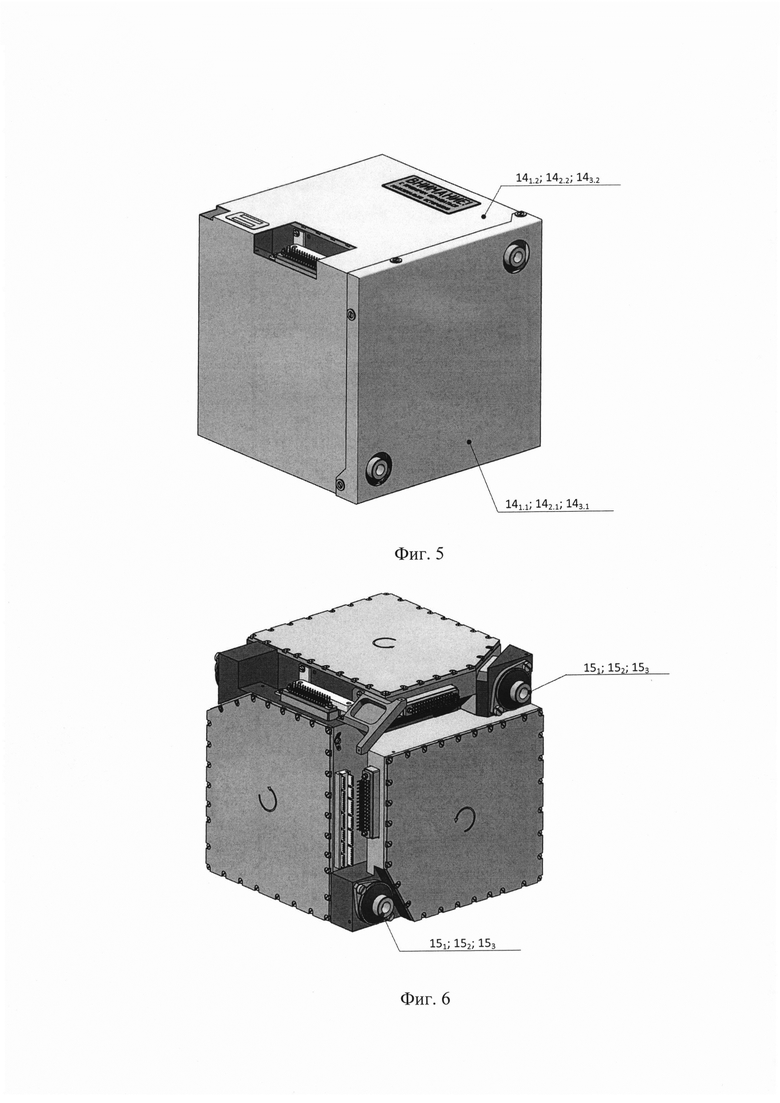
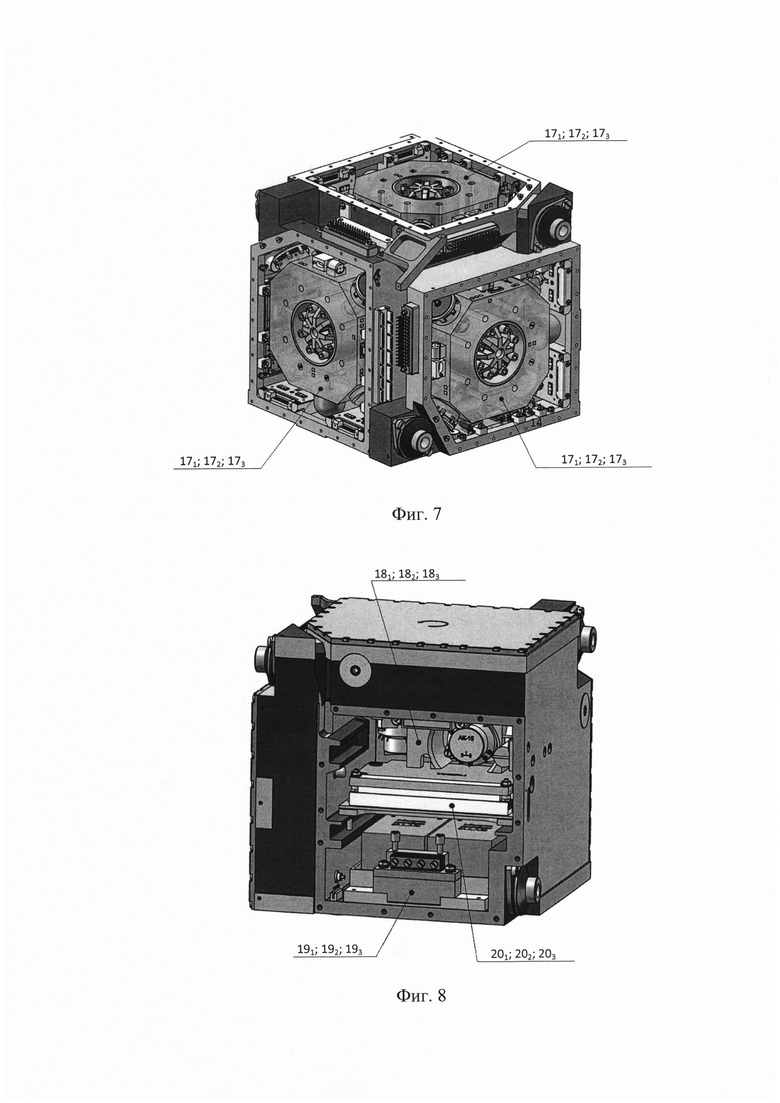
Инерциальный моноблок (11) имеет отсеки (41) и (51) (Фиг. 2). В отсек (41) по направляющим (61) корпуса моноблока (11) на коммутационную плату (на чертежах не показана) с помощью креплений (71) своими разъемами установлены преобразователь сигналов датчиков (81), вычислитель (91), имеющий технологические разъемы (101) и источник вторичного питания (111), а также закрепленный на передней стенке корпуса сетевой преобразователь напряжения (12). В отсеке (41) установлен БЧЭ (131), закрытый со всех сторон пермалоевыми экранами (141.1), (141.2) (Фиг. 5) и закрепленный к стенкам корпуса четырьмя амортизаторами (151) (Фиг. 6) посредством крепежных элементов (161) (Фиг. 3, 4) - по два амортизатора с каждой стороны БЧЭ. В трех взаимно ортогональных полостях БЧЭ расположены кольцевые лазеры (171) (Фиг. 7), а в четвертой - блок акселерометров (181) (Фиг. 8), высоковольтный источник напряжения (191) и устройство регулирования периметра и контроля (201).
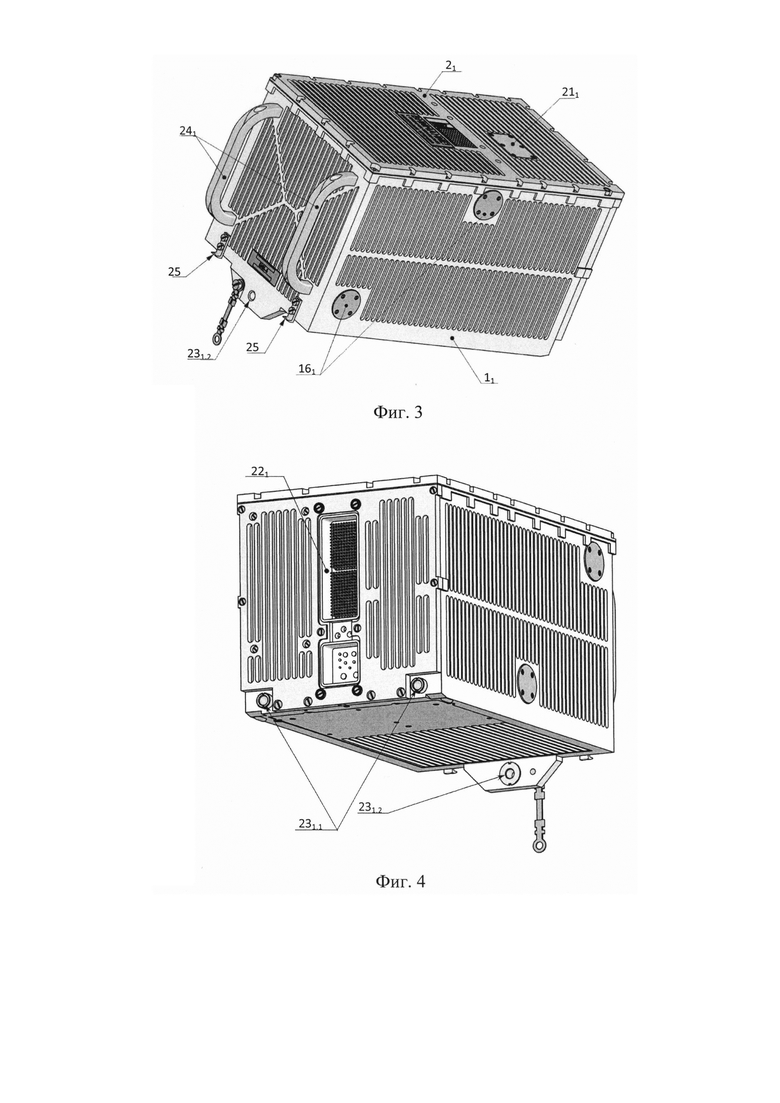
Внешний вид моноблока (11) показан на Фиг. 3, 4. Корпус моноблока закрывается крышкой (21) (Фиг. 1), имеющей съемный герметичный люк (211) для доступа во внутреннюю полость отсека (41) к технологическим разъемам (101) вычислителя (91). На передней стенке корпуса моноблока, ближней к отсеку (41) (Фиг. 4), выполнен врубной разъем (221) и два центрирующих отверстия (231.1). На противоположной внешней стороне корпуса моноблока установлены ручки (241), упоры (25), а также выполнено центрирующее отверстие (231.2).
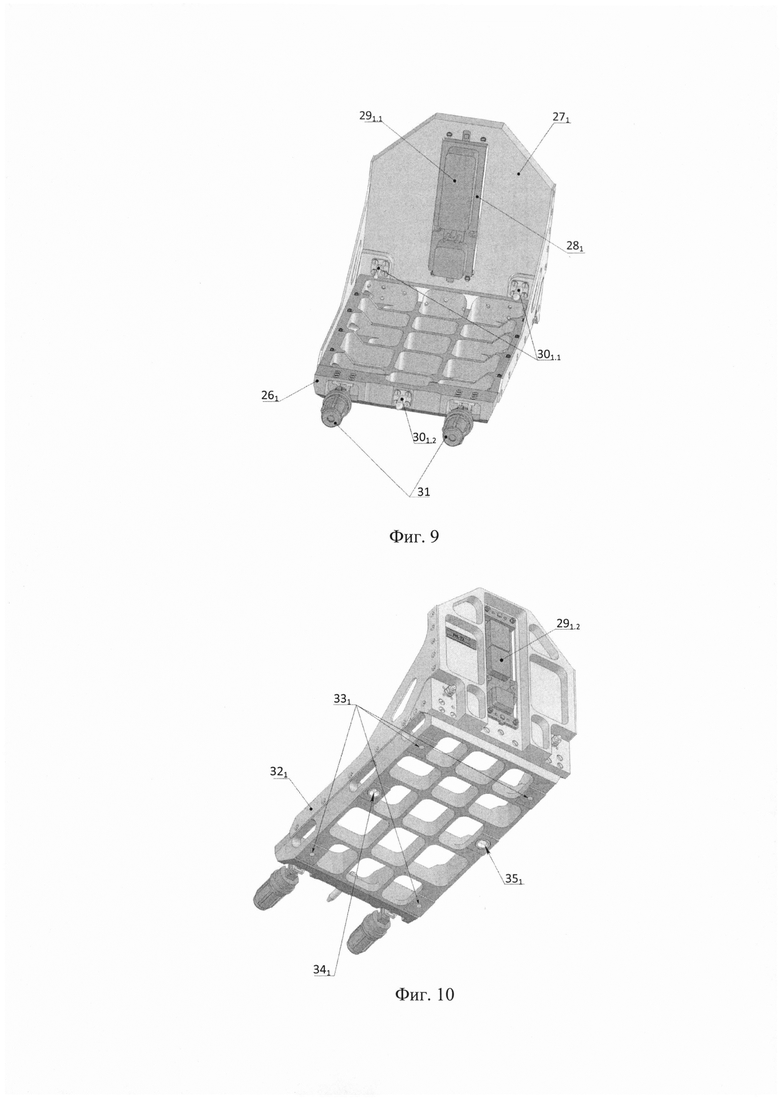
Монтажная рама (31) (Фиг. 9, 10) состоит из основания (261) и стенки (271). В стенке выполнен промежуточный соединитель (281) с разъемами (291.1), (291.2). При этом разъем (291.1) смонтирован со стороны основания и выполнен ответным врубному разъему (221), а разъем (291.2) - с наружной стороны основания и предназначен для соединения с внешними устройствами. На стенке со стороны основания выполнены два направляющих штыря (301.1), ответных центрирующим отверстиям (231.1). На конце основания рамы установлен еще один направляющий штырь (301.2), ответный центрирующему отверстию (231.2) и два тарированных элемента крепления (31) для фиксации передней части рамы на упорах (25). На горизонтальной поверхности основания рамы (Фиг. 10) закреплены направляющие (321), для установки инерциального моноблока, а также выполнены четыре отверстия (331) для жесткого крепления рамы на платформе объекта (например, к профилям самолета под кабиной экипажа), калиброванное отверстие (341) и калиброванный паз (351) для выставки системы относительно строительных осей объекта.
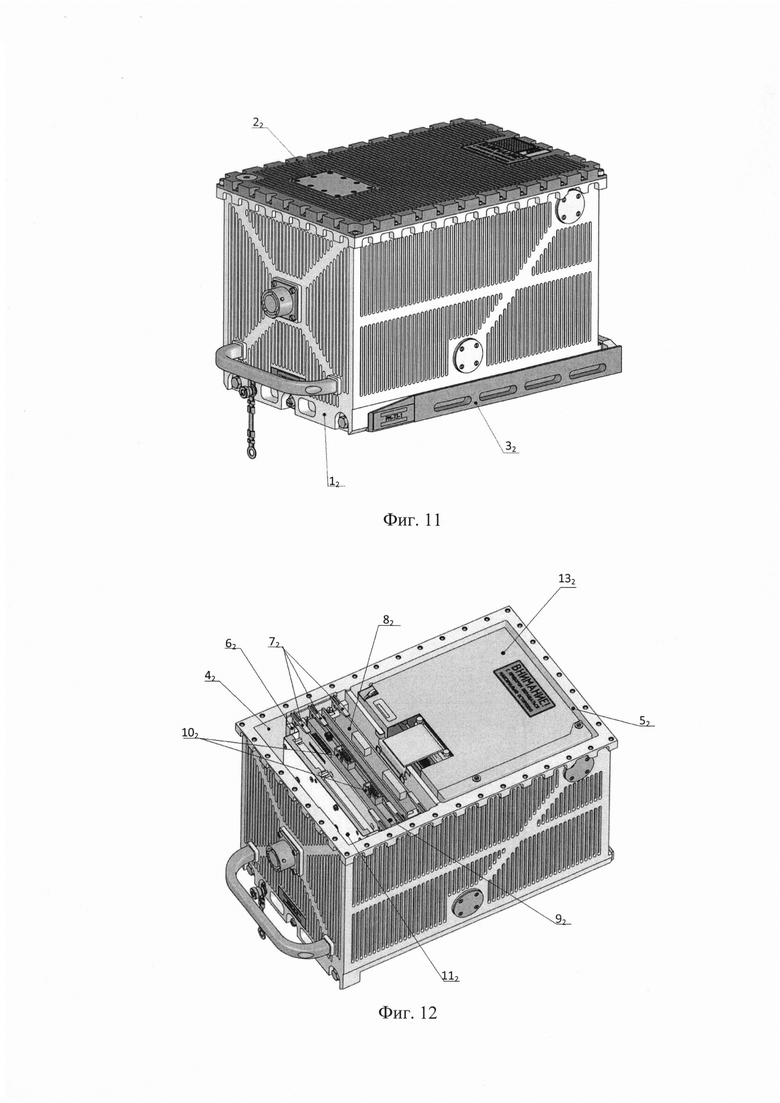
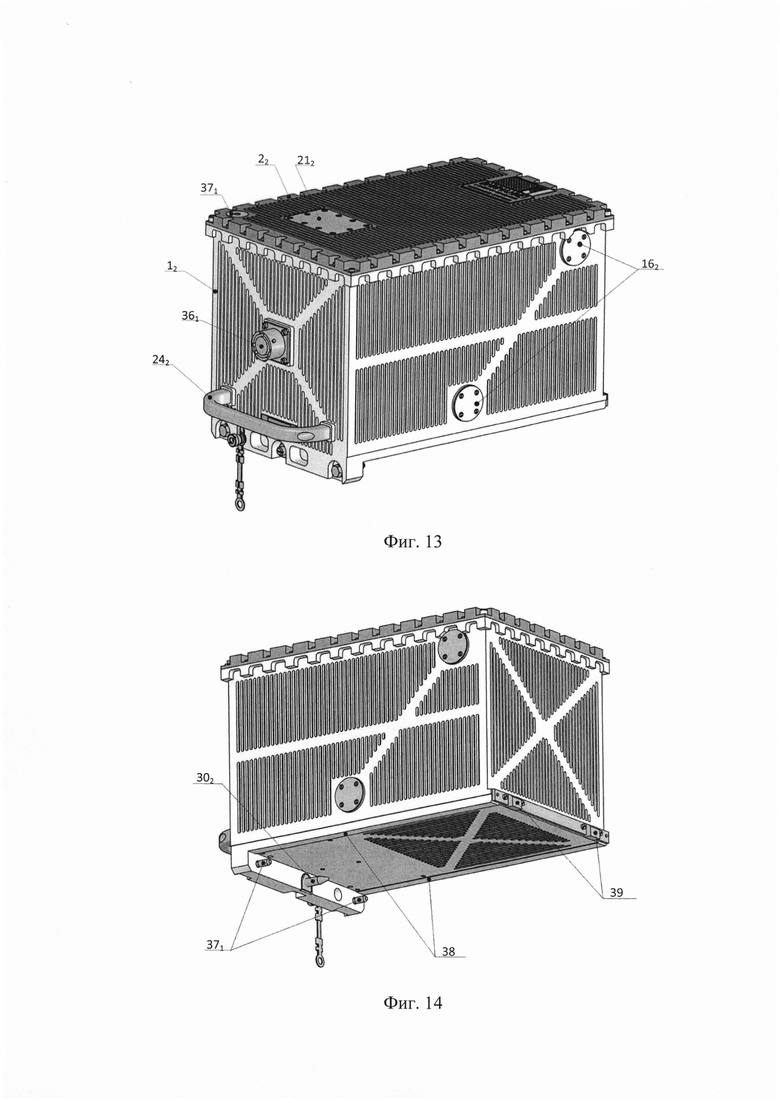
На Фиг. 11-16 представлена БИНС, выполненная в соответствии со вторым предпочтительным вариантом реализации изобретения, с конструктивным выполнением БЧЭ (10) согласно Фиг. 5-8. На наружной поверхности передней стенки корпуса моноблока (12) установлен герметичный электрический разъем (361) (Фиг. 13) и ручка (242). На нижней части этой стенки параллельно боковым стенкам моноблока (Фиг. 14) расположены направляющий штырь (302) и крепежные болты (371) для закрепления моноблока на раме (32). Снаружи днища корпуса моноблока на задней стенке выполнена горизонтальная опорная поверхность (38), на которой установлены два упора (39). Моноблок выполнен с герметичной крышкой (22) (Фиг. 13), снабженной клапаном для герметизации и заполнения моноблока осушенным азотом (401) и герметичным люком (212) для доступа во внутреннюю полость отсека (42) к технологическим разъемам (102) вычислителя (92).
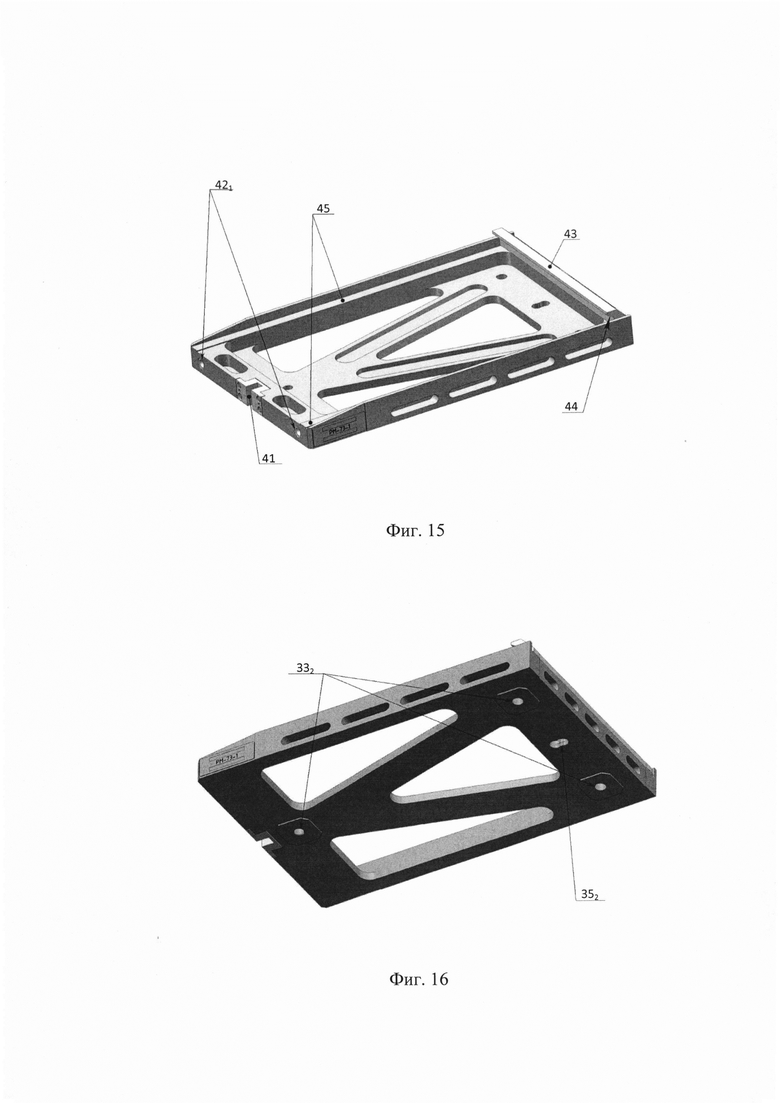
В переднем торце монтажной рамы (Фиг. 15) выполнен центрирующий паз (41) для направляющего штыря (302) и два резьбовых отверстия (421) под крепежные болты (371), на противоположном торце установлена упорная планка (43) с наклонной опорной поверхностью (44) для фиксации задней части рамы на упорах (39). На горизонтальной поверхности рамы имеются направляющие (45) для установки моноблока, а также три отверстия (332) (Фиг. 16) для закрепления рамы на платформе объекта и дополнительное калиброванное отверстие (46) для выставки БИНС относительно строительных осей объекта.
На Фиг. 16-22 - представлена БИНС, выполненная в соответствии с третьим предпочтительным вариантом реализации изобретения с конструктивным выполнением БЧЭ (10) согласно Фиг. 5-8.
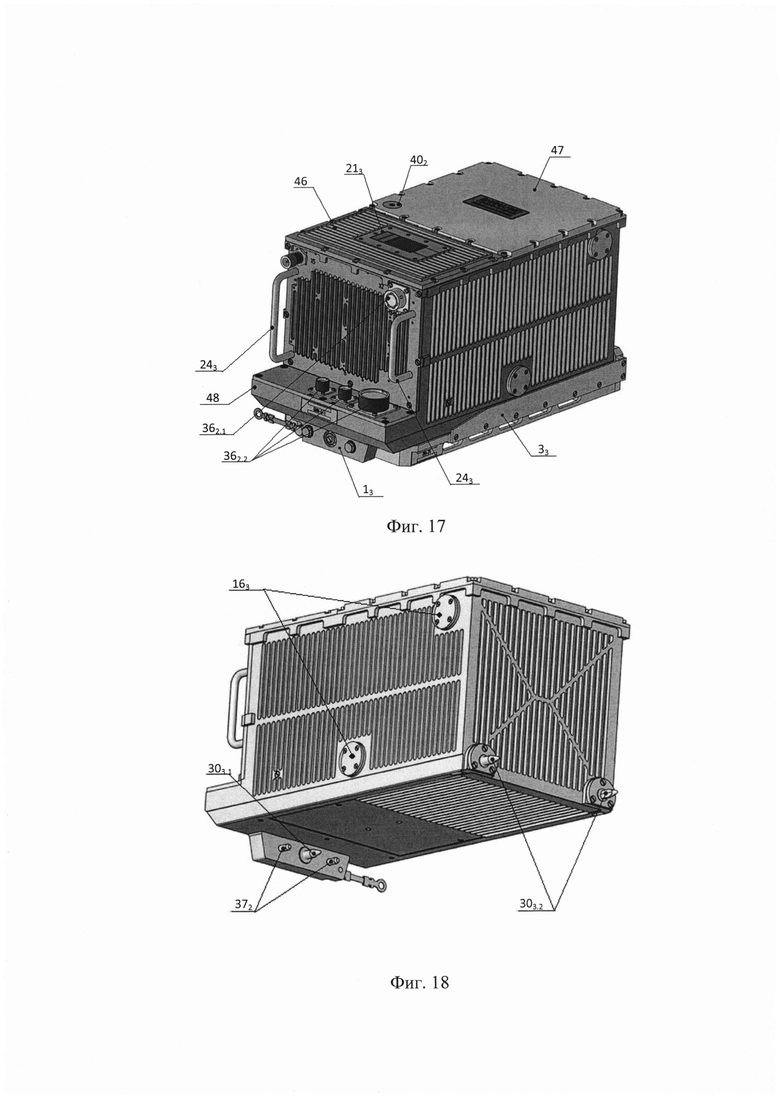
Внешний вид моноблока (13) в сборе с монтажной рамой (33) показан на Фиг. 17. В соответствии с указанным вариантом моноблок имеет две герметичные крышки (46) и (47), первая из которых закрывает отсек блока электроники (43) и вторая, соответственно, отсек БЧЭ (53) (Фиг. 19). На крышке (46) расположен съемный люк (213), обеспечивающий доступ во внутреннюю полость моноблока. Крышка (47) снабжена клапаном (402) для герметизации и заполнения отсека (53) осушенным азотом. На внешней поверхности передней стенки расположены две ручки (243) и герметичные электрические разъемы - разъем (362.1), расположенный на передней стенке, а также три разъема (362.2), размещенных на горизонтальной планке (48). Ниже, расположен направляющий штырь (303.1) и два крепежных болта (372) (Фиг. 18). Два других направляющих штыря (303.2) установлены на нижней части противоположной стенки моноблока.
В отсеке (43) на коммутационной плате (на чертежах не показана) установлены преобразователь сигналов датчиков (83), вычислители (93.1 и (93.2), а также закрепленный на передней стенке корпуса моноблока источник вторичного питания (113). В зависимости от конфигурации БИНС на коммутационной плате устанавливается приемо-измерительный блок СНС (49) (Фиг. 19) или модуль коммутации меток (50) (Фиг. 20). При этом в верхней части передней стенки моноблока расположено гнездо (на чертежах не показано), в которое при наличии в составе БИНС приемо-измерительного блока СНС (49) устанавливается высокочастотный разъем (51) (Фиг. 19), а при отсутствии - ставится заглушка (52) (Фиг. 20).
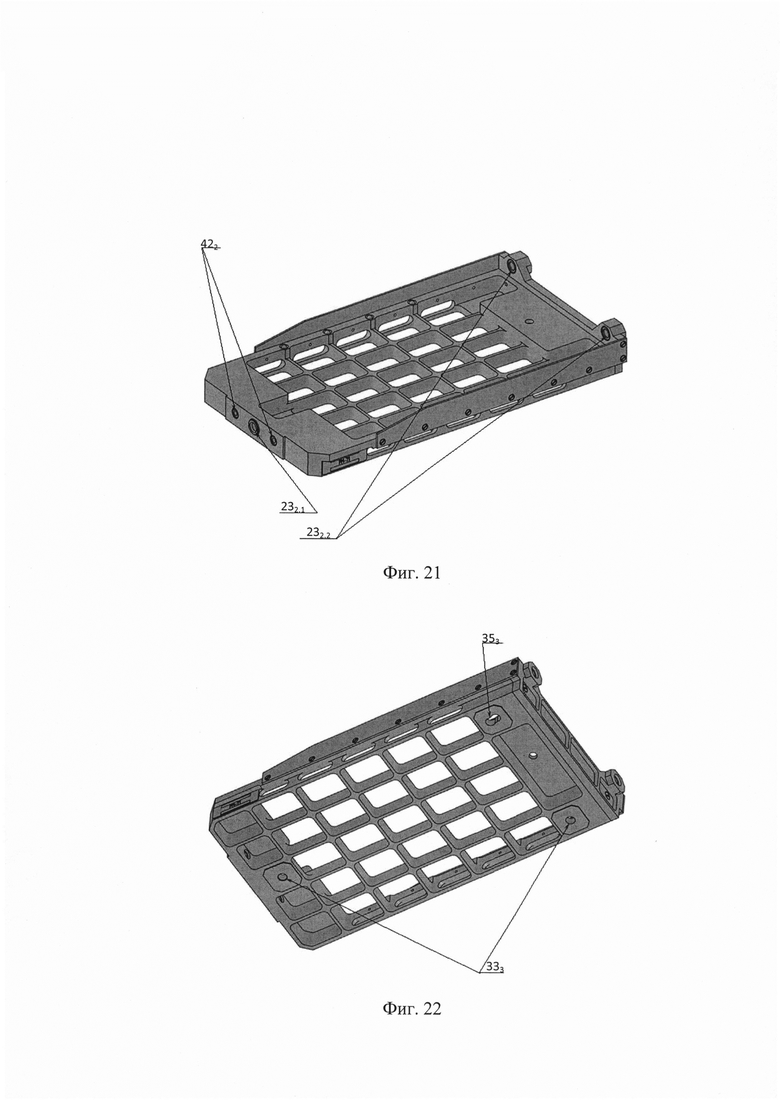
На узких торцах передней и задней стороны монтажной рамы выполнены центрирующие отверстия (232.1) и (232.2) (Фиг. 21) под направляющие штыри (303.1) и, соответственно, (303.2). Кроме того, на переднем торце расположены два резьбовых отверстия (422) для закрепления моноблока в раме крепежными болтами (372). На широкой стороне рамы (Фиг. 22) имеются два калиброванных цилиндрических отверстия (333) и калиброванный паз (353) для установки рамы на платформу объекта и выставки БИНС относительно его строительных осей.
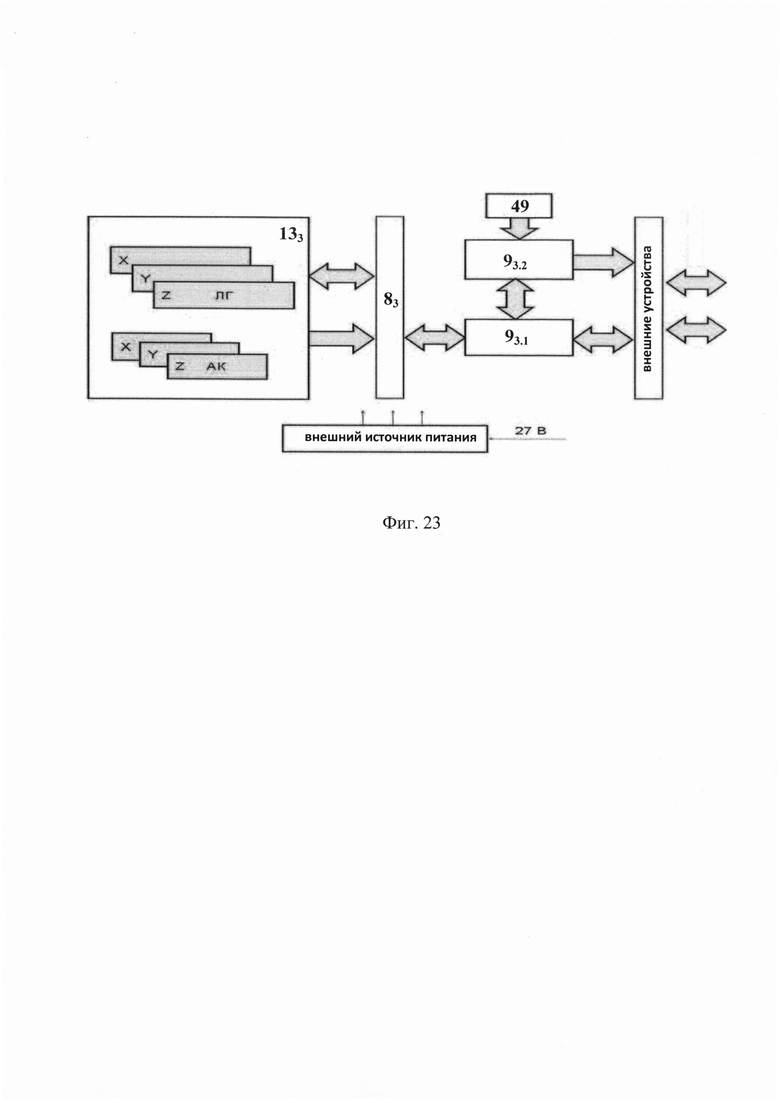
Связи между функциональными элементами БИНС отображены на Фиг. 23 (на примере третьего варианта системы). Связь БИНС с внешними устройствами (системами пилотажно-навигационного комплекса, а также с самолетными системами) осуществляется в виде цифрового кода и разовых команд через герметичный разъем (362.1). БЧЭ (133) содержит три лазерных гироскопа (ЛГ) и три акселерометра (АК), ориентированные в ортогональной приборной системе координат XYZ. Преобразователь сигналов датчиков (83) обеспечивает синхронное преобразование информационных и вспомогательных аналоговых сигналов ЛГ и АК в цифровой код, а также формирование сигналов управления функциональной электроникой ЛГ. Функциональное распределение между вычислителями следующие: вычислитель (93.1) формирует инерциальную информацию, управляет преобразователем сигналов датчиков, осуществляет встроенный контроль инерциальных подсистем и прием внешней информации от навигационного комплекса; вычислитель (93.2) осуществляет комплексную обработку инерциальной и спутниковой информации, поступающей из приемо-измерительного блока СНС (49), а также контроль достоверности спутниковой информации. Источник вторичного питания (113) обеспечивает формирование всех необходимых напряжений из бортового питания.
Приведенная выше информация изложена с полнотой, которая позволяет специалисту в данной области техники ясно понять сущность предложенного изобретения и осуществить его, опираясь на материалы описания и известные сведения, существующие в уровне техники на дату подачи настоящей заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОБЪЕКТА УПРАВЛЕНИЯ | 2021 |
|
RU2771790C1 |
| АМОРТИЗАТОР СИСТЕМЫ ВИБРОЗАЩИТЫ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2021 |
|
RU2774216C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2016 |
|
RU2634082C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| УЧЕБНАЯ АВИАЦИОННАЯ БОМБА С СИСТЕМОЙ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ | 2006 |
|
RU2319102C1 |


Изобретение относится к бесплатформенным инерциальным навигационным системам (БИНС). Заявленное изобретение представляет собой БИНС, включающую инерциальный моноблок, выполненный по меньшей мере с одной герметичной крышкой, и монтажную раму, снабженные фиксирующими элементами для закрепления моноблока на монтажной раме, при этом корпус моноблока имеет на наружной поверхности по меньшей мере одну ручку для переноса и перемещения моноблока в монтажной раме, а также соединительные элементы для электрической связи функциональных элементов БИНС с внешними устройствами, при этом упомянутые функциональные элементы размещены внутри инерциального моноблока и выполнены в виде связанных между собой БЧЭ, преобразователя сигналов датчиков, по меньшей мере одного вычислителя, а также источника вторичного питания, при этом согласно изобретению внутренняя полость инерциального моноблока содержит разделенные перегородкой первый и второй отсеки, причем в первом отсеке установлен БЧЭ, выполненный в виде единого корпуса кубической формы с герметизируемыми с помощью крышек четырьмя полостями, при этом в трех взаимно ортогональных полостях расположены кольцевые лазеры прямоугольной формы с функциональной электроникой лазерного гироскопа, а в четвертой - высоковольтный источник напряжения, устройство регулирования периметра и контроля лазерных гироскопов, а также блок из трех акселерометров, размещенных в едином жестком корпусе, обеспечивающем при его закреплении в БЧЭ параллельность осей чувствительности акселерометров и кольцевых лазеров, при этом корпус БЧЭ закрыт снаружи магнитными экранами и снабжен амортизаторами для крепления к стенкам инерциального моноблока, а во втором отсеке установлены упомянутые источник вторичного питания, преобразователь сигналов датчиков и по меньшей мере один вычислитель, при этом в герметичной крышке инерциального моноблока выполнен герметично закрывающийся съемный люк. Техническими результатами являются: уменьшение массогабаритных параметров БИНС при повышении точности формирования выходной информации системы, упрощение доступа к технологическому разъему вычислителя инерциальной навигационной системы с целью упрощения процесса плановой калибровки БИНС. 18 з.п. ф-лы, 23 ил.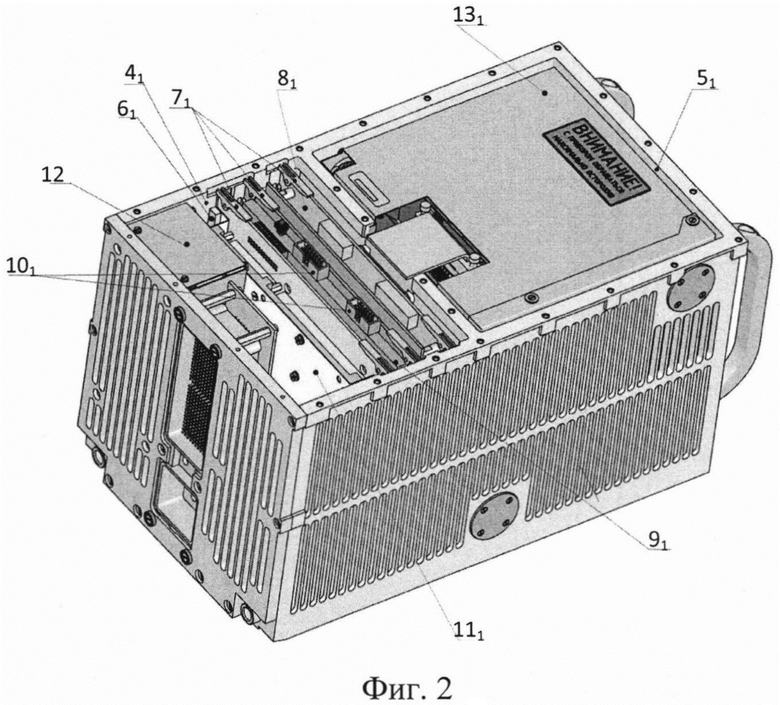
1. Бесплатформенная инерциальная навигационная система, включающая инерциальный моноблок, выполненный по меньшей мере с одной герметичной крышкой, и монтажную раму, снабженные фиксирующими элементами для закрепления моноблока на монтажной раме, при этом корпус моноблока имеет на наружной поверхности по меньшей мере одну ручку для переноса и перемещения моноблока в монтажной раме, а также соединительные элементы для проводной связи функциональных элементов бесплатформенной инерциальной навигационной системы с внешними устройствами, при этом упомянутые функциональные элементы размещены внутри инерциального моноблока и выполнены в виде связанных между собой блока чувствительных элементов, преобразователя сигналов датчиков, по меньшей мере одного вычислителя, а также источника вторичного питания, отличающаяся тем, что внутренняя полость инерциального моноблока содержит разделенные перегородкой первый и второй отсеки, причем в первом отсеке установлен блок чувствительных элементов, выполненный в виде единого корпуса кубической формы с герметизируемыми с помощью крышек четырьмя полостями, при этом в трех взаимно ортогональных полостях расположены кольцевые лазеры прямоугольной формы с функциональной электроникой лазерного гироскопа, а в четвертой - высоковольтный источник напряжения, устройство регулирования периметра и контроля лазерных гироскопов, а также блок из трех акселерометров, размещенных в едином жестком корпусе, обеспечивающем при его закреплении в блоке чувствительных элементов параллельность осей чувствительности акселерометров и кольцевых лазеров, при этом корпус блока чувствительных элементов закрыт снаружи магнитными экранами и снабжен амортизаторами для крепления к стенкам инерциального моноблока, а во втором отсеке установлены упомянутые источник вторичного питания, преобразователь сигналов датчиков и по меньшей мере один вычислитель, при этом в герметичной крышке инерциального моноблока выполнен герметично закрывающийся съемный люк.
2. Система по п. 1, отличающаяся тем, что магнитные экраны, закрывающие корпус блока чувствительных элементов, выполнены из пермаллоя.
3. Система по п. 1, отличающаяся тем, что крепление корпуса блока чувствительных элементов к стенкам инерциального моноблока осуществлено четырьмя амортизаторами по два на двух противоположных стенках, причем каждая пара амортизаторов расположена по ортогональным гипотенузам куба блока чувствительных элементов.
4. Система по п. 1, отличающаяся тем, что электронный отсек дополнительно содержит коммутационную плату, на которую по направляющим корпуса с помощью разъемов и креплений установлены упомянутые преобразователь сигналов датчиков, вычислитель и источник вторичного питания, выполненные в виде отдельных субблоков.
5. Система по пп. 1-4, отличающаяся тем, что моноблок выполнен с двумя ручками, соединительным элементом в виде врубного разъема, а также фиксирующими элементами в виде трех центрирующих отверстий и двух упоров таким образом, что на внешней стороне задней стенки корпуса установлен врубной разъем, выполнены первое и второе центрирующие отверстия, а на внешней стороне передней стенки корпуса расположены ручки, упоры и третье центрирующее отверстие.
6. Система по пп. 1, 5, отличающаяся тем, что в электронном отсеке дополнительно установлен сетевой преобразователь напряжения.
7. Система по пп. 5, 6, отличающаяся тем, что монтажная рама включает основание и прикрепленную к нему стенку и выполнена с соединительным и фиксирующими элементами таким образом, что в стенку вмонтирован промежуточный соединитель, имеющий на внешней стороне стенки разъем для функционального соединения с внешними устройствами, при этом на внутренней стороне стенки также выполнены два направляющих штыря под упомянутые первое и второе центрирующие отверстия, на конце основания расположены направляющий штырь под упомянутое третье центрирующее отверстие и два тарированных элемента крепления моноблока для фиксации передней части рамы на упомянутых упорах, на поверхности основания выполнены направляющие для установки моноблока, а также четыре отверстия для его закрепления на платформе объекта, калиброванное отверстие и калиброванный паз для выставки инерциальной навигационной системы относительно строительных осей объекта.
8. Система по пп. 1-4, отличающаяся тем, что моноблок выполнен с ручкой, фиксирующими элементами в виде направляющего штыря, двух крепежных болтов и упоров, а также соединительными элементами в виде герметичного электрического разъема таким образом, что на внешней стороне передней стенки корпуса установлен электрический разъем и ручка, на нижней части корпуса со стороны разъема параллельно боковым стенкам расположен направляющий штырь и крепежные болты, а на внешней стороне задней стенки корпуса перпендикулярно горизонтальной опорной поверхности установлены два упора.
9. Система по пп. 1, 8, отличающаяся тем, что крышка моноблока снабжена клапаном для герметизации и заполнения отсека блока чувствительных элементов осушенным азотом.
10. Система по пп. 8 и 9, отличающаяся тем, что монтажная рама выполнена с фиксирующими элементами в виде центрирующего паза под упомянутый направляющий штырь и двух резьбовых отверстий под упомянутые крепежные болты, расположенными на передней стенке корпуса рамы, упорной планки с наклонной упорной поверхностью для его фиксации на упомянутых упорах, на поверхности монтажной рамы выполнены направляющие для установки моноблока, а также четыре отверстия для его закрепления на платформе объекта, калиброванное отверстие и калиброванный паз для выставки инерциальной навигационной системы относительно строительных осей объекта.
11. Система по пп. 1, 4, 5, 7, отличающаяся тем, что моноблок выполнен с двумя ручками, фиксирующими элементами в виде трех направляющих штырей и двух крепежных болтов, а также соединительными элементами в виде четырех электрических разъемов источника вторичного питания таким образом, что на внешней вертикальной поверхности передней стенки корпуса расположены две ручки и первый электрический разъем, а в нижней части этой стенки имеется дополнительная полость, закрытая планкой, на которой установлены второй, третий и четвертый электрические разъемы, при этом в нижней части передней стенки корпуса размещен первый направляющий штырь, а в нижней части задней стенки - второй и третий направляющие штыри, причем на передней стенке на уровне первого направляющего штыря расположены два крепежных болта.
12. Система по п. 11, отличающаяся тем, что на коммутационной плате дополнительно размещен модуль коммутации меток.
13. Система по п. 11, отличающаяся тем, что на коммутационной плате дополнительно размещен приемо-измерительный блок спутниковой навигационной системы.
14. Система по п. 13, отличающаяся тем, что на внешней вертикальной поверхности передней стенки корпуса моноблока выполнен соединительный элемент в виде высокочастотного разъема приемо-измерительного блока спутниковой навигационной системы.
15. Система по п. 1, отличающаяся тем, что вычислитель выполнен из двух блоков: блока формирования инерциальной информации, управления преобразователем сигналов датчиков, встроенного контроля инерциальных подсистем и приема информации от спутниковой навигационной системы, а также блока комплексной обработки инерциальной и спутниковой информации и контроля достоверности спутниковой информации.
16. Система по пп. 1, 11-15, отличающаяся тем, что корпус моноблока выполнен с двумя герметичными крышками, одна из которых закрывает отсек блока электроники, а другая - отсек блока чувствительных элементов.
17. Система по п. 16, отличающаяся тем, что крышка отсека блока чувствительных элементов снабжена клапаном для герметизации и заполнения отсека осушенным азотом.
18. Система по пп. 1, 16, отличающаяся тем, что герметично закрывающийся съемный люк выполнен в крышке отсека блока электроники.
19. Система по пп. 11-18, отличающаяся тем, что монтажная рама выполнена с фиксирующими элементами в виде трех центрирующих отверстий под упомянутые направляющие штыри, двух резьбовых отверстий под упомянутые крепежные болты, калиброванных паза и двух цилиндрических отверстий для закрепления рамы на платформе объекта и выставки инерциальной навигационной системы относительно строительных осей объекта, при этом на малых сторонах рамы выполнены центрирующие и резьбовые отверстия, а на широкой стороне расположены со стороны передней стенки моноблока первое калиброванное цилиндрическое отверстие и со стороны задней его стенки калиброванный паз и второе калиброванное цилиндрическое отверстие.
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2611710C1 |
| БЕЗПЛАТФОРМЕННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС С ИНЕРЦИАЛЬНОЙ СИСТЕМОЙ ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ И СПОСОБ КОРРЕКЦИИ ЕГО ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ | 2014 |
|
RU2548115C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1990 |
|
RU2011169C1 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 2017 |
|
RU2655626C1 |
| US 6493631 B1, 10.12.2002 | |||
| Ветроэнергетическая установка | 1988 |
|
SU1590629A1 |
| Измайлов Е.А., Портнов Б.И., Кузнецов А.Г., Современные бесплатформенные инерциальные навигационные системы двух классов точности, М., Труды МИЭА, Навигация и управление летательными аппаратами, 2014, вып | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |

