Изобретение относится к деталям машин и может быть использовано в составе изделий авиационной и ракетной техники.
Известен волновой привод, содержащий корпус, размещенные в нем электродвигатель и волновую передачу, генератор волн которой связан с валом электродвигателя через промежуточный редуктор [1]. Недостатком этого волнового привода является отсутствие в его составе датчика угла поворота, что ограничивает его использование в системах автоматического регулирования.
Этого недостатка лишен выбранный в качестве прототипа привод, содержащий корпус, размещенный в нем двигатель, связанный с выступающим из корпуса со стороны его первого торца выходным валом, а также датчик угла поворота, корпус которого соединен с выходным валом, а вал датчика угла поворота - с корпусом, при этом вал датчика угла поворота соосен выходному валу [2].
Недостатком такого привода является его невысокая прочность, обусловленная консольным закреплением корпуса привода, так как с одного торца и с наружной поверхности корпус полностью охватывается выходным валом. Соответственно, это накладывает существенные ограничения на массу устанавливаемого на вал привода исполнительного элемента и на величину вибрационных, инерционных и ударных нагрузок, воспринимаемых приводом. Поскольку уровень таких нагрузок весьма значителен в изделиях авиационной и особенно ракетной техники, использование прототипа в этих областях техники представляется достаточно проблематичным. Другим недостатком этой конструкции являются ее ограниченные функциональные возможности - на этом приводе невозможно размещать исполнительные элементы, обладающие значительным габаритом в направлении продольной оси привода - такие, как закрылки, створки, панели солнечных батарей и т.п., что связано с малой длиной привода, не позволяющей обеспечить жесткое закрепление протяженных исполнительных элементов. Простое же увеличение длины корпуса не даст в этом случае положительного результата, так как резко снижает жесткость закрепления привода на изделии из-за увеличения величины консоли от плоскости крепления привода до его центра масс.
Задачей, решаемой с помощью заявленного изобретения, является повышение прочности и расширение функциональных возможностей привода.
Технический результат достигается за счет того, что в известном приводе, содержащем корпус, размещенный в нем двигатель, связанный с выступающим из корпуса со стороны его первого торца выходным валом, а также датчик угла поворота, один элемент пары «корпус датчика угла поворота - вал датчика угла поворота» которого соединен с выходным валом, а другой элемент этой же пары - с корпусом, при этом вал датчика угла поворота соосен выходному валу, согласно изобретению датчик угла поворота размещен в корпусе со стороны второго торца корпуса, противоположного первому, вал датчика угла поворота установлен в размещенных в корпусе подшипниках и выполнен выступающим из корпуса со стороны его второго торца, при этом выступающие из корпуса участки выходного вала и вала датчика угла поворота соединены друг с другом через исполнительный элемент, закрепленный неподвижно с одного своего края на выходном валу, а с другого своего края закрепленный неподвижно на валу датчика угла поворота. Такое исполнение привода позволяет избежать консольного закрепления привода на изделии, что существенно повышает его прочность и расширяет функциональные возможности привода за счет возможности размещать исполнительные элементы, обладающие значительным габаритом в направлении продольной оси привода.
На иллюстрации приведен пример конкретного выполнения привода, продольный разрез.
Привод (в данном примере электромеханический волновой, хотя может быть и гидравлическим или газовым) содержит корпус 1, размещенный в нем двигатель 2, связанный с выступающим из корпуса 1 со стороны его первого торца 3 выходным валом 4, через редуктор 5, выходным звеном которого является волновая зубчатая передача 6 с гибким 7 и неподвижным жестким 8 колесами. Внутри гибкого колеса 7 размещен кулачковый генератор волн 9 с подшипником 10 с гибкими кольцами (т.наз. гибкий подшипник). Выходной вал 4 может вращаться относительно корпуса 1 в подшипниках 11 (установленный в корпусе 1) и 12 (сдвоенный подшипник, установленный между выходным валом 4 и генератором волн 9). Жесткое колесо 8 волновой зубчатой передачи 6 жестко закреплено на корпусе 1 посредством штифтов 13, а гибкое колесо 7 соединено с выходным валом 4 посредством шлицевой муфты 14. В выходном валу 4 выполнена полость 15, двигатель 2 установлен внутри нее. В данном примере конкретного исполнения двигатель выполнен электрическим, однако может применяться и другой тип двигателя, поэтому заявляется обобщающий признак «двигатель» без конкретизации его типа. В приводе также установлен датчик угла поворота 16, размещенный со стороны второго торца 17 корпуса 1, противоположного первому торцу 3. Корпус 18 датчика угла поворота 16 соединен с корпусом 1 штифтами 13 и 19. Вал 20 датчика угла поворота 16 установлен в размещенных в корпусе 1 подшипниках 21 соосно с выходным валом 4 и выполнен выступающим из корпуса 1 со стороны его второго торца 17. Датчик выполнен контактным, на его валу 20 установлены диски 22, имеющие на своей наружной поверхности проводящие и непроводящие участки, а в корпусе размещены контактирующие с дисками 22 контакты 23. Выступающие из корпуса 1 участок 24 выходного вала 4 и участок 25 вала 20 датчика угла поворота 16 соединены друг с другом через исполнительный элемент 26, закрепленный неподвижно с одного своего края 27 на выходном валу 4 посредством штифта 28, а с другого своего края 29 закрепленный неподвижно на валу 20 датчика угла поворота 16 посредством штифта 30.
Привод работает следующим образом: при включении двигателя 2 вращение его вала передается на генератор волн 9. Генератор волн 9, вращаясь на сдвоенном подшипнике 12, своим подшипником 10 деформирует гибкое колесо 7, вводит его в зацепление с жестким колесом 8 и приводит в движение гибкое колесо 7 и через шлицевую муфту 14 - выходной вал 4, вращающийся в подшипниках 11 и 12. При этом подшипник 12 сохраняет свою соосность корпусу 1 за счет того, что деформированное гибкое колесо 7 жестко базируется многопарным зацеплением своих зубьев с зубьями жесткого колеса 8, а соосность генератора волн 9 гибкому колесу 7 обеспечивается тем, что наружная поверхность подшипника 10 находится в поверхностном контакте с внутренней поверхностью гибкого колеса 7, а внутренняя - с наружной поверхностью генератора волн 9. Одновременно вращение выходного вала 4 через штифт 28, исполнительный элемент 26 и штифт 30 передается валу 20 датчика угла поворота 16, вызывая вращение его дисков 22 и изменение электрических сигналов, снимаемых контактами 23. Так как валы 4 и 20 соосны, то вращение исполнительного элемента 26 возможно в любом диапазоне (исключая естественные пространственные ограничения, связанные с размещением привода на изделии). При этом исполнительный элемент 26 помимо своих прямых функций выполняет функцию передачи угла поворота выходного вала 4 на вал 20 датчика углового положения.
В данном примере датчик выполнен специально с достаточно прочным валом, позволяющим воспринимать нагрузки со стороны исполнительного элемента, такие датчики достаточно распространены в устройствах ракетно-космической техники (см., например, [3]). Использование вала датчика угла поворота (наряду с выходным валом) для размещения исполнительного элемента позволяет существенно расширить диапазон возможных конструктивных исполнений привода, так как устраняется необходимость в сплошном валу, проходящем через весь привод, что обычно затрудняет компоновку узлов и деталей привода и приводит к увеличению радиальных габаритов. За счет устранения необходимости в консольном закреплении привода существенно повышается его прочность, а также расширяются функциональные возможности.
Указанные преимущества позволяют рекомендовать заявленный привод к использованию в агрегатах авиационной и космической техники.
Литература
1. Е.Г.Гинзбург, "Волновые зубчатые передачи". - Л.: Машиностроение, 1969, стр.125, рис.60.
2. Авторское свидетельство СССР №1089325 по кл. F16H 1/00, 1984 г. - прототип.
3. Атлас конструкций элементов приборных устройств. - М.: Машиностроение, 1982, стр.108.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2008 |
|
RU2377456C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2280798C2 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1998 |
|
RU2131544C1 |
| Нагружающее устройство | 2015 |
|
RU2615719C1 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2000 |
|
RU2174205C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ/РАЗБОРКИ ВОЛНОВОЙ ГЕРМЕТИЧНОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ АБРАМОВА В.А. | 2013 |
|
RU2566584C2 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
Изобретение может быть использовано в качестве приводов автоматики изделий авиационной и ракетной техники. Привод содержит корпус (1), размещенный в нем двигатель (2), связанный с выступающим из корпуса со стороны его первого торца (3) выходным валом (4), а также датчик (16) угла поворота. Вал датчика угла поворота соосен выходному валу. Датчик угла поворота размещен в корпусе со стороны второго торца (17) корпуса, противоположного первому. Вал (20) датчика угла поворота установлен в размещенных в корпусе подшипниках (21) и выполнен выступающим из корпуса со стороны его второго торца (17). Выступающие из корпуса участки выходного вала и вала датчика угла поворота соединены друг с другом через исполнительный элемент (26), закрепленный неподвижно с одного своего края на выходном валу, а с другого своего края закрепленный неподвижно на валу датчика угла поворота. Изобретение направлено на повышение прочности и расширение функциональных возможностей. 1 ил.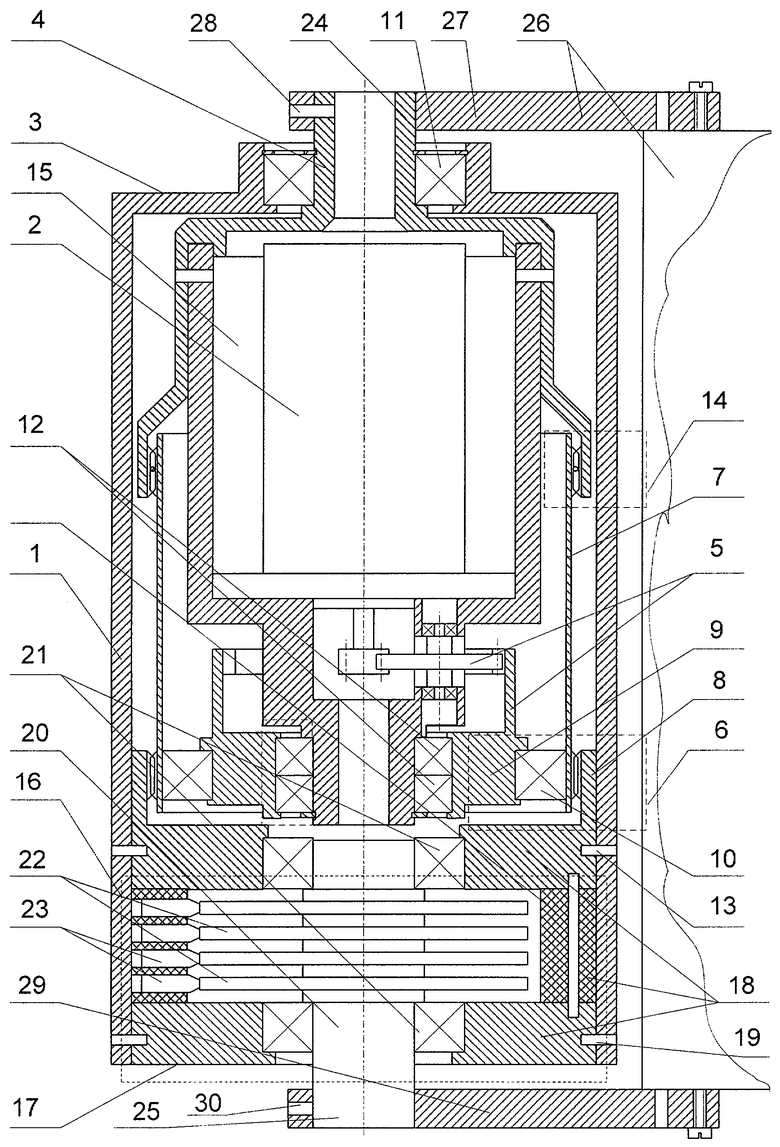
Привод, содержащий корпус, размещенный в нем двигатель, связанный с выступающим из корпуса со стороны его первого торца выходным валом, а также датчик угла поворота, один элемент пары «корпус датчика угла поворота - вал датчика угла поворота» которого соединен с выходным валом, а другой элемент этой же пары - с корпусом, при этом вал датчика угла поворота соосен выходному валу, отличающийся тем, что датчик угла поворота размещен в корпусе со стороны второго торца корпуса, противоположного первому, вал датчика угла поворота установлен в размещенных в корпусе подшипниках и выполнен выступающим из корпуса со стороны его второго торца, при этом выступающие из корпуса участки выходного вала и вала датчика угла поворота соединены друг с другом через исполнительный элемент, закрепленный неподвижно с одного своего края на выходном валу, а с другого своего края закрепленный неподвижно на валу датчика угла поворота.
| Привод | 1983 |
|
SU1089325A1 |
| JP 2007321879 А, 13.12.2007 | |||
| US 6273211 В1, 14.08.2001. | |||

