Изобретение «Способ и устройство для измерения и подавления физических процессов (полей) окружающей среды самонастраивающимся опорным процессом (полем)» относится к измерительной технике и технической кибернетике и может быть использовано для измерения параметров и формы физического процесса (поля) окружающей среды, а также для компенсации энергии физического процесса (поля) окружающей среды, посредствам компенсационного воздействия на физический процесс (поле) окружающей среды синтезируемым по результатам измерения эквивалентным (опорным) физическим процессом (полем). Изобретение может быть также использовано: для маскирования объекта, обнаружение которого может быть осуществлено по эхо-сигналу от целенаправленного воздействия на объект физическим процессом или зондирующим сигналом, например, ультразвуковым или электромагнитным излучением; для определения факта появления внешнего объекта и его координат, по изменению физического процесса (поля) окружающей среды в контролируемой зоне по сравнению с исходным его состоянием; для распознавания объектов, по искажению энергии внешнего физического процесса (поля) в контролируемой зоне.
Известен способ измерения с опорным случайным процессом (см., например, Тихонов Э.П. Адаптивные методы, алгоритмы и структуры в вероятностных измерениях с опорным случайным процессом. Автореферат диссертации на соискание ученой степени доктора технических наук. Ленинград 1983. Тихонов Э.П. Измерения с опорным случайным процессом, Метрология, 1985, №10, с.20-29. Тихонов Э.П. Адаптивный метод измерения с использованием в качестве меры опорного случайного процесса - В кн.: Проблемы метрологического обеспечения систем обработки измерительной информации: Тез. Докл. IV Всесоюзн. конф. М., 1982, с 61-62 и др.), заключающейся в сравнении параметров или характеристик входного сигнала с соответствующими параметрами или характеристиками опорного случайного сигнала с последующей итеративной корректировкой этих параметров или характеристик до достижения результата измерения. При этом результат измерения фиксируется по факту уравновешивания измеряемых параметров или характеристик входного и опорного сигналов. Ни форма, ни вероятностные характеристики (кроме отдельных параметров) опорного сигнала не подстраиваются к форме измеряемого сигнала. Поэтому недостатки известного способа заключается в том, что по результатам сравнения параметров или характеристик входного и опорного сигнала с априорно известными характеристиками, измеряются только вероятностные характеристики и параметры входного сигнала без учета его изменяющейся во времени формы. Процесс измерения выбранной вероятностной характеристики входного сигнала достигается за счет уравновешивания ее параметра (аргумента) до достижения равенства значений измеряемой вероятностной характеристики и априорно известной аналогичной вероятностной характеристики опорного случайного процесса без самонастройки формы опорного сигнала. Отметим, что известный способ был экспериментально апробирован и внедрен в промышленных образцах (Ф-790, К-741), что подтверждено документально.
Вероятностные характеристики и тем более параметры представляют только необратимую сжатую информацию о сигнале. Поэтому измерение вероятностных характеристик и параметров в известном способе ограничивает сферу его применения для решения таких задач, как распознавание, определение координат объекта и не может быть в принципе использован для компенсации (подавления) энергии выделенного физического процесса окружающей среды, а также для маскирования объектов при попытке их обнаружения по эхо-сигналу посредствам специально сформированных, например, ультразвуковых или электромагнитных зондирующих сигналов.
В качестве признаков, описывающих сигнал, можно использовать значения его вероятностных характеристик и параметров. Однако эти признаки недостаточно информативны и могут быть использованы только для решения задачи классификации и ограниченного круга задач распознавания. Решение задачи распознавания можно осуществить по множеству признаков, связанных непосредственно с формой сигнала. К таким признакам можно, например, отнести амплитудно-частотный и фазо-частотный спектр сигнала, по которым в соответствии с обратным преобразованием Фурье можно восстановить форму сигнала. Однако измерение указанных характеристик сигнала в реальном масштабе времени достаточно сложно при реализации и связано со значительными аппаратными и временными затратами, что затрудняет распознавание и практически не решет задачу подавления энергии окружающей среды в реальном масштабе времени, например, акустического шума, путем использования обратного преобразования Фурье с последующей экстраполяцией синтезированного сигнала.
В известном методе и способе сравнения с мерой и в его модификациях, таких как методы противопоставления, дифференциальный, нулевой или компенсационный, при реализации предусматривается наличие устройства, воспроизводящего априорно установленную величину меры, и специально введенного устройства сравнения (дискриминатора, нуль-органа). Известные компенсационные методы и способы измерений, как для постоянных, так и для переменных электрических сигналов основаны на компенсации измеряемого электрического сигнала, сигналом, создаваемым тем или иным способом, например на образцовом сопротивлении (см., например, Маликов С.Ф., Тюрин Н.И., Введение в метрологию, - 2 изд., М., 1966, а также Карандеев К.Б., Специальные методы электрических измерений, - М. - Л., 1963). При этом компенсационный метод измерений является одним из вариантов метода сравнения с мерой, в котором результирующий эффект воздействия величин посредствам прибора сравнения доводят до нуля (добиваются нулевого показания устройства сравнения). Известно, что компенсационный метод и способ измерений отличается высокой точностью. Он зависит от чувствительности нуль-органа, контролирующего процесс осуществления компенсации, и от точности определения величины априорно установленной меры, компенсирующей измеряемую величину. Однако техническое выполнение функции компенсации при измерении известными способами посредствам устройства, воспроизводящего априорно установленную величину меры, и специально введенного устройства сравнения (дискриминатора, нуль-органа) с высокой точностью для случайно изменяющихся во времени сигналов одновременно по нескольким параметрам практически невозможно. Для этого требуется решение задачи для создания в реальном масштабе времени многомерной, высокоточной меры и алгоритма для последующей экстраполяции компенсирующего сигнала, фактически идентичного компенсируемому входному сигналу.
Известны также устройства, реализующие способ измерения с опорным случайным процессом (см., например, а.с. №235412, кл. 42m4, 7/52, «Устройство для измерения функции распределения случайных сигналов» автора Тихонова Э.П. Дата опубликования 16.01.1969, БИ №5). В это устройство, содержащее усилитель, модулятор, амплитудный дискриминатор, реверсивный счетчик, регулятор уровня выборки, логическую схему «исключительно-ИЛИ», введен генератор импульсов случайной амплитуды, выход которого через второй амплитудный дискриминатор соединен с одним из входов логической схемы «исключительно-ИЛИ». Раздельные входы логической схемы соединены с вычитающим и суммирующим входами реверсивного счетчика, параллельные выходы которого через введенный преобразователь код-аналог подключены к входу первого амплитудного дискриминатора. В результате такого подключения сравниваются между собой выходы первого и второго дискриминатора, то есть соответствующее преобразование входного и опорного случайного сигнала. По результатам сравнения регулируется по цепи отрицательной обратной связи, посредством регулятора уровня выборки, состоящего из реверсивного счетчика и преобразователя код-аналог, порог срабатывания первого дискриминатора до достижения равенства частоты превышения входным сигналом регулируемого порога, частоте превышения опорным случайным сигналом априорно установленного порога второго дискриминатора. Таким образом, в данном устройстве измеряются значения функции распределения вероятностей входного сигнала по априорно установленным значениям функции распределения опорного случайного сигнала без учета его формы, что не позволяет решать задачи активного подавления шума и другие перечисленные выше задачи.
В соответствии с рассмотренным принципом измерения с опорным случайным процессом предложено изобретение «Установка для поверки измерительных четырехполюсников» в а.с. SU №1594461 A1, G01R 31/28 авторов Призенко С.В., Тихонова Э.П., Якушенко Е.А. с датой опубликования 23.09.1990, БИ №35. В данной установке за счет компенсации амплитудного и фазового отклонения выходного сигнала поверяемого четырехполюсника относительно образцового измеряется степень их неидентичности и тем самым осуществляется поверка измерительного четырехполюсника. В данном устройстве по существу реализуется тот же способ измерения с опорным случайным процессом, который формируется из случайного испытательного сигнала на выходе образцового измерительного четырехполюсника. Подключенные к соответствующим выходам образцового и поверяемого измерительных четырехполюсников два триггера, два инвертера, сумматор по модулю два и две схемы «И» выполняют функцию сравнения степени неидентичности выходных сигналов данных четырехполюсников, по которой измеряется отклонение соответствующих характеристик образцового и поверяемого четырехполюсника. Недостатком данного устройства, реализующего фактически тот же способ измерения с опорным случайным процессом, является его существенная специализация, так как оно измеряет путем компенсации только ошибку отклонения соответствующих частотных характеристик для установленных единичных измерительных четырехполюсников и, таким образом, не решает задачу их классификации, например, по типу и тем более задачу распознавания вида четырехполюсника и другие, перечисленные выше задачи. Известны и другие подобные устройства.
Наиболее близким по технической сущности к предлагаемому устройству является а.с. №354431, кл. G06g 7/52 «Устройство для измерения функции распределения случайных сигналов» автора Тихонова Э.П. с датой опубликования 09.10.1972, БИ №30. Данное устройство содержит регулятор уровня выборки, последовательно соединенные усилитель, модулятор, амплитудный дискриминатор входного сигнала, логическую схему «Исключительно-ИЛИ», генератор стробирующих импульсов, генератор образцового случайного сигнала, реверсивный счетчик, цифроаналоговый преобразователь, аналоговый сумматор, регистратор. В данном устройстве, предназначенном для измерения вероятностной характеристики случайных процессов, а именно функции распределения вероятностей, генератор образцового случайного сигнала и дискриминатор в совокупности фактически образуют блок генератора опорного сигнала в виде двоичной последовательности с регулируемой частотой и, следовательно, вероятностью появления единицы. А реверсивный счетчик, цифроаналоговый преобразователь и дополнительно введенные аналоговый сумматор напряжения и накапливающий сумматор по существу образуют блок самонастройки параметров генератора опорного сигнала в виде двоичной последовательности. Действительно, вероятность появления единицы, равная значению функции распределения случайных импульсов на выходе дискриминатора, изменяется регулировкой уровня выборки по принципу отрицательной обратной связи, которая осуществляется на входе дискриминатора, связанного по одному из входов с выходом аналогового сумматора напряжения. Первый и второй входы аналогового сумматора напряжения соединены соответственно с выходами регулятора уровня выборки и цифроаналогового преобразователя. При этом вход цифроаналогового преобразователя соединен с параллельными выходами реверсивного счетчика, суммирующий и вычитающий вход которого соединен с раздельными выходами схемы «Исключительно-ИЛИ». На выходах схемы «Исключительно-ИЛИ», которая выполняет функцию сравнения входной и опорной (образцовой) двоичной последовательностей, формируемых на выходах соответствующих дискриминаторов, образуется сигнал разбаланса (ошибки) по частоте появления единицы во входной и опорной двоичной последовательности. Схема «Исключительно-ИЛИ» суммированием по модулю два выполняет функцию сравнения двоичных последовательностей за счет суперпозиции опорного и входного сигнала и по существу является смесителем. Усилитель входного сигнала, модулятор, генератор стробирующих импульсов и дискриминатор образуют схему преобразования входного непрерывного электрического сигнала в электрический сигнал другой формы - сигнал в виде двоичной последовательности.
Результат работы данного устройства заключается в том, что измеряется только функция распределения случайного входного сигнала путем его сравнения с априорно заданной функцией распределения опорного случайного сигнала. При этом осуществляется компенсационный метод измерения, так как за счет компенсации уровней выборки (аргумента) функций распределения доводят до нуля отклонение значений функций распределения входного и опорного сигнала в заданной точке ее аргумента в виде частот появления единиц и нулей на выходах дискриминаторов. Недостаток данного устройства заключается в том, что найденное отклонение измеряемой функции распределения от функции распределения образцового случайного сигнала не используется для измерения и соответственно для компенсации формы входного сигнала, а величина ее отклонения только фиксируется на накапливающем сумматоре.
Таким образом, указанные известные способы и устройства принципиально не обеспечивают совмещение функции измерения параметров и характеристик входного сигнала, эквивалентного энергии изменяющегося физического процесса окружающей среды, с измерением его формы и, тем более, не могут использовать результаты измерения для самонастройки формы опорного сигнала, идентичной форме входного сигнала. Тем самым, известные способ и устройства не могут обеспечить решение задачи активного подавления энергии, изменяющегося физического процесса (поля) окружающей среды, путем воздействия на него преобразованным в эквивалентный физический процесс (поле) опорным сигналом, так как они не могут обеспечить функцию самонастройки формы опорного сигнала по форме входного сигнала. Поэтому известные способ и соответствующие устройства не обеспечивают также решение задачи маскирования объекта, обнаружение которого осуществляется последующей специальной обработкой дистанционно принимаемой отраженной от объекта доли энергии - эхо-сигнала, по результатам воздействия на этот объект определенным физическим процессом (полем), сформированным зондирующим сигналом. Известные способ и соответствующие устройства из-за ограничений на измеряемые вероятностные характеристики не могут с достаточной достоверностью осуществить распознавание объекта, отражающего по результатам воздействия на него физическим процессом энергию, функционально зависящую от конфигурации (формы) объекта. Известные способ и соответствующие устройства не могут по той же причине обнаружить с достаточной достоверностью факт присутствия иного объекта и, тем более, определить его координаты по искажению физического процесса (поля) окружающей среды относительно его первоначальной формы. В качестве воздействующего физического процесса (поля) при решении задачи обнаружения и распознавания могут быть использованы, например, ультразвуковые, электромагнитные или иные излучения, преобразование которых возможно в электрический сигнал.
Таким образом, совокупность проанализированных новых отличительных признаков из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
Техническим результатом предлагаемого способа является выполнение в реальном масштабе времени функции измерения в динамике параметров (амплитуды, фазы и размерности сетки частот) косинусных составляющих и за счет их суперпозиции формирования по результатам измерения конфигурации процесса (поля) окружающей среды в широком динамическом диапазоне с получением нового качества, расширяющего функциональные возможности способа. К расширению функциональных возможностей способа относятся: компенсация (подавление) энергии окружающей среды; распознавание внешнего объекта, доля искажения энергии от которого попадает в область окружающей среды, находящуюся под воздействием опорного случайного процесса (поля); обнаружение и определение местонахождения (т.е. координат) по величине и форме искажения исходного, не искаженного физического процесса (поля) окружающей среды; маскирование объекта-излучателя опорного сигнала подавлением энергии окружающей среды, включая долю отраженной энергии в виде эхо-сигнала.
Техническим результатом устройства для измерения, активного подавления и распознавания формы физических процессов (полей) окружающей среды, реализующего способ, является измерение совокупности параметров и формы физического процесса (поля) окружающей среды в широком динамическом диапазоне в реальном масштабе времени при расширении функциональных возможностей устройства, а именно: компенсации (подавления) энергии окружающей среды; распознавания внешнего объекта; обнаружения и определения местонахождения объекта; активное маскирование объекта-излучателя опорного сигнала (поля) при снижении погрешности измерения формы физических процессов (полей) окружающей среды.
Сущность предлагаемой группы изобретений для достижения технического результата заключается в следующем. В соответствии со способом измерения и подавления физических процессов (полей) окружающей среды посредством самонастраивающегося опорного процесса (поля), по установленному начальному значению числа членов ряда частот (размерности сетки частот), фаз и амплитуд формируют конечное начальное число исходных косинусных гармонических составляющих, из которых суммированием синтезируют опорный электрический сигнал и преобразуют его в опорный физический процесс (поле). Излучением в окружающую среду преобразованным в опорный физический процесс (поле) синтезированным опорным электрическим сигналом воздействуют на физический процесс (поле) окружающей среды и в реальном масштабе времени осуществляют обратное преобразование результата взаимодействия опорного физического процесса (поля) с физическим процессом (полем) окружающей среды в электрический композиционный сигнал. Полученный электрический композиционный сигнал умножают раздельно по каждой частоте на косинусные и полученные из него дополнительные синусные гармонические составляющие с единичными амплитудами и фазами, сдвинутыми на 180° или π рад относительно исходных косинусных составляющих опорного электрического сигнала. По результатам умножения раздельно по каждой косинусной и дополнительной синусной составляющим (квадратурной демодуляции) корректируют в соответствии с выбранным итерационным алгоритмом усреднения, например, экспоненциальным сглаживанием, начальные значения амплитуд и фаз исходных косинусных гармонических составляющих и, тем самым, осуществляют для установленной размерности сетки частот на основе принципа отрицательной обратной связи самонастройку для каждой косинусной составляющей опорного сигнала начальные значения параметров - амплитуды и фазы. По полученным косинусным гармоническим составляющим со скорректированными параметрами вновь суммированием синтезируют на следующем временном такте уже скорректированный опорный сигнал и соответственно физический процесс (поле), которым излучением воздействуют на физический процесс (поле) окружающей среды. По результатам скорректированного воздействия на текущем такте и последующих тактах итерации непрерывно повторяют описанные выше действия и, после переходного процесса, осуществляют за счет самонастройки параметров составляющих косинусных сигналов компенсацию энергии физического процесса (поля) окружающей среды, преобразованным в эквивалентную энергию физического процесса (поля) синтезированным опорным процессом (полем). В результате самонастройки параметров косинусных составляющих опорного сигнала, получают в реальном масштабе времени измеренные значения фаз и амплитуд косинусных составляющих и форму изменения физического процесса (поля) окружающей среды и, тем самым, энергию окружающей среды в динамике, которой компенсационно подавляют энергию физических процессов (полей) окружающей среды.
Для повышения быстродействия и точности компенсации энергии физического процесса (поля) окружающей среды в динамике, начальное значение размерности сетки частот косинусных составляющих корректируют по принципу отрицательной обратной связи в зависимости от величины меры энергии композиционного электрического сигнала в темпе с самонастройкой параметров косинусных составляющих опорного сигнала.
Для распознавания формы физического процесса (поля) окружающей среды в качестве признаков используют измеренные значения фаз и амплитуд косинусных составляющих опорного сигнала, а также размерность сетки частот косинусных составляющих, которые сравнивают с предварительно записанными в запоминающем устройстве признаками.
Для распознавания факта преднамеренного или не преднамеренного изменения формы физического процесса (поля) окружающей среды, например, из-за вторжения иного источника энергии, используют в качестве признаков измеренные значения фаз и амплитуд косинусных составляющих опорного сигнала, а также размерность сетки частот, которые в реальном масштабе времени сохраняют на предшествующих временных тактах измерения и сравнивают с результатами измерения на предшествующих или последующих тактах измерения.
Для распознавания координат и образа источника преднамеренного или не преднамеренного изменения формы физического процесса (поля) окружающей среды получают от пространственно распределенных преобразователей форм энергии физического процесса (поля) и используют в качестве признаков измеренные значения фаз и амплитуд косинусных составляющих опорного сигнала, а также размерность сетки частот, которые сравнивают в реальном масштабе времени между собой и сохраненными на предшествующих временных тактах измерения признаками исходной формы физического процесса (поля) окружающей среды.
Для упрощения алгоритма вычисления в качестве составляющих опорного сигнала устанавливают ортогональные периодические сигналы с самонастраивающимися параметрами, отличными от гармонических составляющих, например в соответствии с функцией Уолша или Хара.
В качестве опорного физического процесса (поля) и физического процесса (поля) окружающей среды используют либо акустические, либо электромагнитные, либо гидродинамические, либо другие сигналы, либо их композицию.
Для достижения технического результата в соответствии с предлагаемым способом в устройство для измерения функции распределения случайных сигналов, содержащее входной усилитель, генератор импульсов, модулятор, амплитудный дискриминатор, регулятор уровня, образующие по существу схему преобразования электрического сигнала в электрический сигнал другой формы, генератор образцового случайного сигнала, дискриминатор импульсов случайной последовательности, образующие по существу блок генератора опорного сигнала в виде двоичной последовательности с регулируемой вероятностью появления единицы, реверсивный счетчик, цифроаналоговый преобразователь и аналоговый сумматор напряжения, образующие по существу блок самонастройки параметров генератора опорного сигнала в виде двоичной последовательности, логическую схему «исключительно-или», образующие по существу схему сравнения, для расширения функциональных возможностей, включая измерение параметров физических процессов (полей) окружающей среды, введены прямой преобразователь электрического сигнала в физический процесс (поле) окружающей среды, обратный преобразователь физического процесса (поля) окружающей среды в электрический сигнал, блок распознавания образов и ситуаций во внешней среде, блок управления. Причем, блок генератора опорного сигнала и схема преобразования электрического сигнала в электрический сигнал другой формы выполнены в виде блока генератора опорного сигнала с самонастраивающейся формой, блок самонастройки параметров генератора опорного сигнала в виде двоичной последовательности выполнен в виде блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой. Функцию схемы сравнения выполняет окружающая среда. Блок генератора опорного сигнала с самонастраивающейся формой по первому выходу соединен с входом прямого преобразователя электрического сигнала в физический процесс (поле) окружающей среды, а по второму выходу соединен соответственно со вторым входом блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой, первый вход которого соединен с выходом обратного преобразователя физического процесса (поля) окружающей среды в электрический сигнал, а первый и второй выходы параллельно подключены к первому и второму входам блока распознавания образов и ситуаций во внешней среде и к первому и второму входам блока генератора опорного сигнала с самонастраивающейся формой. Третий вход блока генератора опорного сигнала с самонастраивающейся формой соединен с третьим выходом блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой. Выход и вход прямого и обратного преобразователей электрического сигнала в физический процесс (поле) окружающей среды и физического процесса (поля) окружающей среды в электрический сигнал соединены непосредственно с окружающей средой. Блок управления по управляющему входу-выходу параллельно соединен соответственно с управляющими входами-выходами генератора опорного сигнала с самонастраивающейся формой, блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой и с блоком распознавания образов и ситуаций во внешней среде. Блок генератора опорного сигнала с самонастраивающейся формой состоит из генератора-синтезатора сетки частот косинусных составляющих, схемы изменения фазы для сетки частот, схемы изменения амплитуды для сетки частот, синтезатора-сумматора опорного сигнала, цифроаналогового преобразователя. При этом выход генератора-синтезатора сетки частот косинусных составляющих соединен с первым входом схемы изменения фазы для сетки частот, первый выход которого соединен с входом схемы изменения амплитуды сетки частот, а второй выход соединен со вторым выходом блока генератора опорного сигнала с самонастраивающейся формой. Выход схемы изменения амплитуды сетки частот соединен с входом синтезатора-сумматора опорного сигнала, выход которого через цифроаналоговый преобразователь соединен с первым выходом блока генератора опорного сигнала с самонастраивающейся формой. Управляющие входы-выходы генератора-синтезатора сетки частот косинусных составляющих, схем изменения фазы и амплитуды для сетки частот, синтезатора-сумматора опорного сигнала соединены с управляющим входом-выходом блока генератора опорного сигнала с самонастраивающейся формой.
Блок самонастройки параметров генератора опорного сигнала с самонастраивающейся формой состоит из аналого-цифрового преобразователя, преобразователя косинуса в синус, схемы самонастройки фазы, схемы самонастройки амплитуды, схемы контроля погрешности и размерности сетки частот. При этом первый вход блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой через аналого-цифровой преобразователь параллельно соединен с первыми входами схемы самонастройки фазы, схемы самонастройки амплитуды и входом схемы контроля погрешности и размерности сетки частот. Второй вход блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой параллельно соединен со вторым входом схемы самонастройки амплитуды и входом преобразователя косинуса в синус, выход которого подключен ко второму входу схемы самонастройки фазы. Выход схемы самонастройки фазы соединен с первым выходом блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой, второй и третий выходы которого соединены соответственно с выходом схемы самонастройки амплитуды и схемы контроля погрешности и размерности сетки частот. Управляющие входы-выходы схемы самонастройки фазы, схемы самонастройки амплитуды и схемы контроля погрешности и размерности сетки частот соединены с управляющим входом-выходом блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой.
Блок распознавания образов и ситуаций во внешней среде состоит из запоминающего устройства признаков (измеренных значений фаз, амплитуд, а также размерности сетки частот косинусных составляющих) и схемы принятия решения. При этом первый и второй входы схемы принятия решения соединены и запоминающего устройства признаков соединены параллельно с первым и вторым входом блока распознавания образов и ситуаций во внешней среде, а третий вход блока принятия решений соединен с выходом запоминающего устройства признаков. Управляющие входы-выходы запоминающего устройства признаков и схемы принятия решения соединены с управляющими входами-выходами блока распознавания образов и ситуаций во внешней среде.
Заявляемая группа изобретений предназначена для измерения параметров физического процесса или поля окружающей среды и его формы, путем генерации, преобразования и излучения в окружающую среду опорного процесса (поля) в эквивалентных окружающей среде физическом содержании и форме. Эквивалентность физического содержания достигается преобразованием электрического опорного сигнала в физический процесс (поле) окружающей среды. Эквивалентность формы опорного процесса (поля) обеспечивается тем, что в процессе его взаимодействия с окружающей средой в реальном масштабе времени осуществляется самонастройка параметров и характеристик составляющих опорного процесса (поля) до полной или, хотя бы частичной, компенсации опорным процессом (полем) соответствующего процесса (поля) окружающей среды. В случае изменения во времени процесса (поля) окружающей среды, соизмеримой с динамикой самонастройки параметров и характеристик опорного процесса (поля), степень компенсации опорным процессом (полем) соответствующего процесса (поля) окружающей среды зависит от динамики самонастройки характеристик и параметров его составляющих. Сам процесс самонастройки характеристик и параметров опорного сигнала является экстраполяционным (предсказывающим), поэтому по ошибке экстраполяции формы физического процесса (поля) окружающей среды опорным сигналом и, следовательно, по ошибке экстраполирующей компенсации как раз и осуществляется самонастройка характеристик и параметров опорного сигнала. В результате полной в статике или частичной в динамике экстраполяционной компенсации опорным процессом (полем) соответствующего процесса (поля) окружающей среды, предлагаемый способ и устройство выполняют:
- измерение параметров и формы физического процесса (поля) окружающей среды, преобразованного в электрический сигнал, с погрешностью, определяемой динамикой вероятностных характеристик физического процесса (поля) окружающей среды;
- подавление энергии изменяющегося физического процесса (поля) окружающей среды по результату его компенсации преобразованным в эквивалентный физический процесс (поле) опорным сигналом, форма которого в реальном масштабе непрерывно самонастраивается к форме процесса (поля) окружающей среды в соответствии с установленным итерационным алгоритмом;
- маскирование объекта-излучателя опорного процесса (поля) при воздействии на окружающую его среду внешним источником излучения физического процесса (поля) с целью обнаружения по эхо-сигналу объекта-излучателя;
- обнаружение факта появления нового объекта в окружающей среде;
- определение координат нового объекта в окружающей среде за счет пространственного искажения первоначальной формы физического процесса (поля) окружающей среды и отраженной от объекта доли энергии;
- распознавание объекта, в том числе, за счет отраженной от объекта доли энергии и нелинейного взаимодействия собственного поля объекта с преобразованным в соответствующий физический процесс (поле) опорным сигналом.
При этом подавление энергии изменяющегося физического процесса (поля) окружающей среды и маскирование объекта-излучателя опорного процесса (поля) при воздействии на окружающую его среду внешним источником излучения физического процесса (поля) с целью обнаружения объекта-излучателя являются техническим результатом изобретения, обусловленным предложенным способом измерения параметров и формы физического процесса (поля) окружающей среды. Факт измерения в предложенном способе возможен только при компенсации соответствующего физического процесса окружающей среды, включающего воздействующую и отраженную от объекта составляющую физического процесса в виде эхо-сигнала, так как функцию нуль-органа выполняет окружающая среда. Действительно, в процессе компенсационного взаимодействия сформированного опорного физического процесса (поля) с физическим процессом (полем) окружающей среды по величине экстраполирующей ошибки компенсации осуществляют самонастройку параметров косинусных составляющих формы опорного сигнала до полной ее идентичности форме сигнала, описывающего физический процесс (поле) окружающей среды. При выполнении самонастройки компенсацией подавляют энергию окружающей среды, включая вносимую в окружающую среду долю энергии самого объекта-источника опорного сигнала, отраженную от него. В результате компенсации отраженной энергии от объекта-источника опорного сигнала, включая и долю искаженной им энергии окружающей среды, выполняют маскирование данного объекта, обнаружение которого осуществляется путем воздействия на объект-источник опорного сигнала физическим процессом, например, внешним ультразвуковым или электромагнитным излучением, сформированным специально для этого, например, в целях локации. Полученные в результате измерения, вследствие самонастройки, параметры опорного сигнала, отождествляют с существенными признаками процесса (поля) окружающей среды и используют для распознавания формы физического процесса поля окружающей среды. При этом полная идентичность формы и параметров опорного сигнала и сигнала, описывающего процесс (поле) окружающей среды, достигается в статике или для некоторой динамики характеристик окружающей среды при отсутствии эффекта нелинейного взаимодействия опорного процесса (поля) с процессом (полем) окружающей среды. В случае возникновение нелинейного эффекта взаимодействия опорного процесса (поля) с процессом (полем) окружающей среды путем введения дополнительной сетки высокочастотной сетки косинусных составляющих, согласно способу, осуществляют, во-первых, факт обнаружения данного взаимодействия и, во-вторых, определяют величину и параметры данного взаимодействия по дополнительным высокочастотным косинусным составляющим. При нелинейном взаимодействии окружающей среды с опорным физическим процессом (полем) не достигается полная компенсация энергии окружающей среды. Однако мощность не скомпенсированной высокочастотной составляющей энергии физического процесса (поля) окружающей среды, возникающей в результате нелинейного взаимодействия, существенно меньше скомпенсированной низкочастотной составляющей энергии физического процесса (поля) окружающей среды.
По результатам взаимодействия опорного сигнала с процессом (полем) окружающей среды выполняют посредством самонастройки формы опорного случайного процесса (поля) в реальном масштабе времени измерение в динамике параметров и в целом формы процесса (поля) окружающей среды методом измерения, подобно методу сравнения с мерой, но не идентичного ему, фактически любых видов физических процессов (полей), которые могут быть преобразованы в электрический сигнал. Отличительной особенностью в предложенном способе является отсутствие, как такового, устройства, выполняющего функцию сравнения, которая является обязательным атрибутом известных методов измерения. Это, как раз, и связано с тем, что функция, подобная функции сравнения опорного и измеряемого процесса (поля) в предложенном способе, выполняется косвенно в физическом пространстве, в котором осуществляется взаимодействие в виде суперпозиции сравниваемых физических процессов (полей). По результату этого взаимодействия выделяют и выполняют самонастройку амплитуды и фазы гармонических составляющих опорного процесса (поля). Самонастройку указанных параметров осуществляют по многомерному итерационному алгоритму, сходимость которого к устойчивому значению (к неподвижной точке) или в его некоторую окрестность возможна только лишь при полной или ограниченной компенсации опорным процессом (полем) процесса (поля) окружающей среды. Кроме того, введением функции контроля погрешности компенсации, в предложенном способе осуществляют самонастройку размерности сетки частот или числа членов ряда частот косинусных составляющих опорного процесса. Применение предложенного подхода связано также с тем, что техническое выполнение функции сравнения известными способами с высокой точностью для изменяющихся во времени сигналов одновременно по нескольким параметрам практически невозможно. Следствием решения этой проблемы в предложенном способе измерения с самонастраивающимся опорным сигналом, как раз и появляется новое качество, расширяющее функциональные возможности предложенного способа. Действительно, распознавание внешнего объекта осуществляется путем сравнения параметров опорного сигнала, получаемых в результате самонастройки при измерении неизвестного физического процесса (поля), с параметрами опорного сигнала (уставками), полученными и запомненными в результате предварительно проведенного измерения или иного анализа множества известных физических процессов (полей). Эффект обнаружения параметров физического процесса (поля) и определение местонахождения объекта достигается путем фиксации результатов измерения параметров окружающего объект физического процесса (поля) в текущий момент времени и сравнения их с ранее полученными или задержанными на фиксированный интервал времени результатами предыдущего измерения при отсутствии объекта. Обнаружение и измерение нелинейного взаимодействия преобразованного опорного процесса (поля) с процессом (полем) окружающей среды осуществляют путем дополнительной генерации высокочастотных косинусных составляющих, которые используют для компенсации соответствующей части спектра композиционного сигнала. Маскирование объекта-излучателя опорного сигнала (поля) достигается благодаря компенсации не только пассивной составляющей физического процесса (поля) окружающей объект-излучатель опорного сигнала среды, а и активной составляющей этой среды, возникающей от внешнего источника, в том числе, эпизодически в виде эхо-сигнала.
Сущность предлагаемых решений иллюстрируется следующими чертежами:
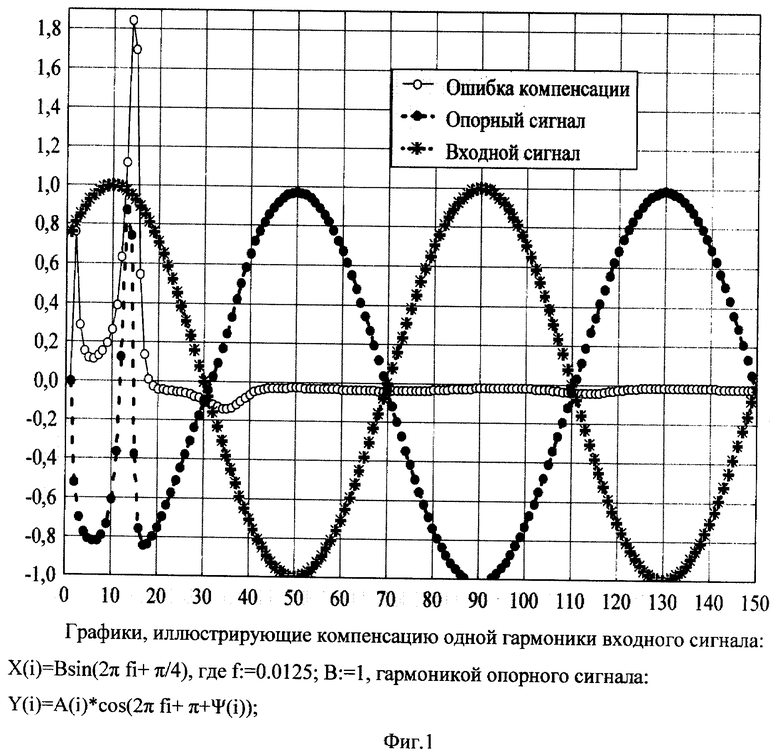
фиг.1 - графики, иллюстрирующие компенсацию одной гармоники входного сигнала:
X(i)=Bsin(2πfi+π/4), где f:=0.0125; В:=1, гармоникой опорного сигнала:
Y(i)=A(i)*cos(2πfi+π+Ψ(i)), i=1, 2, …;
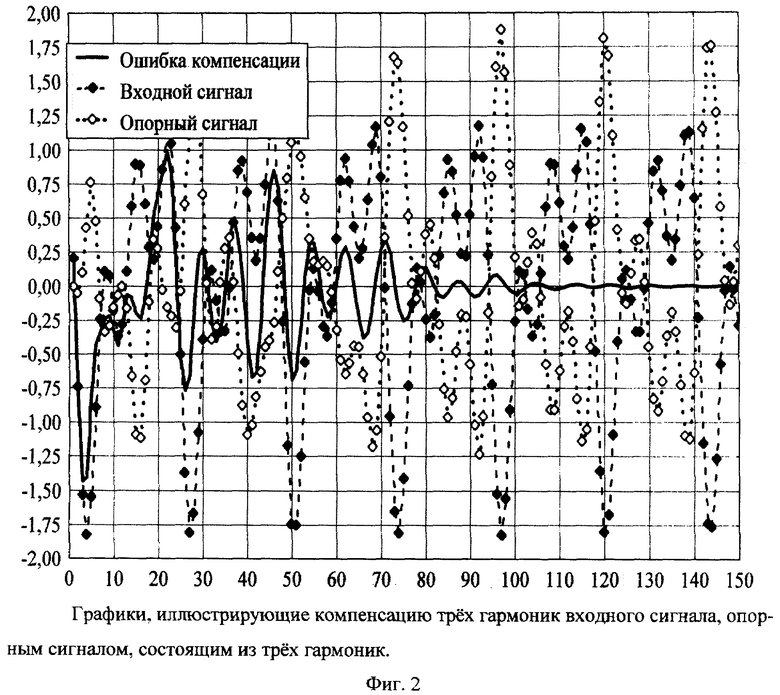
фиг.2 - графики, иллюстрирующие компенсацию трех гармоник входного сигнала, опорным сигналом, состоящим из трех гармоник;
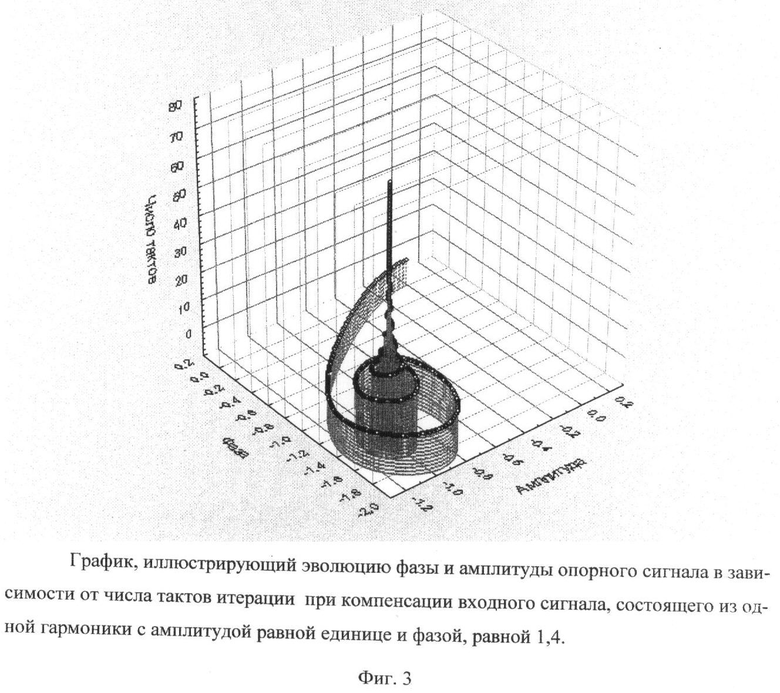
фиг.3 - график, иллюстрирующий эволюцию фазы и амплитуды опорного сигнала в зависимости от числа тактов итерации при компенсации входного сигнала, состоящего из одной гармоники, с амплитудой, равной единице, и фазой, равной 1,4;
фиг.4 - графики, иллюстрирующие эволюцию фаз и амплитуд опорного сигнала в зависимости от числа тактов итерации при компенсации входного сигнала, состоящего из семи различных гармоник с различными фазами;
фиг.5 - структурная схема устройства для измерения, активного подавления и распознавания формы физических процессов (полей) окружающей среды.
Способ осуществляют следующим образом. Известно, что любой сигнал при достаточных для технических приложений ограничениях можно представить в виде ряда ортогональных функций, например, тригонометрических функций. В дальнейшем для простоты рассматривается именно этот вид представления. Поэтому опорный процесс (поле) или сигнал представляют в виде ряда тригонометрических функций с установленными начальными значениями параметров. На основании предварительных данных о классе возможных сигналов, описывающих множество состояний окружающей среды, определяют максимально возможный для данного класса динамический диапазон изменения и начальные значения частоты, фазы и амплитуды. Начальные значения последних двух параметров целесообразно установить равными нулю. По нулевым начальным данным на первом такте итерации получают нулевой опорный электрический сигнал, преобразование которого дает нулевой опорный физический процесс (поле). Поэтому результатом взаимодействия на первом такте итерации нулевым опорным физическим процессом (полем) с физическим процессом (полем) окружающей среды является непосредственно физический процесс (поле) окружающей среды, по которому и осуществляют в соответствии с нижеописанными действиями коррекцию или самонастройку начальных значений параметров косинусных составляющих опорного сигнала на первом такте итерации. Эти действия заключаются в следующем. В реальном масштабе времени, то есть в темпе с воздействием, сформированным опорным физическим процессом (полем) на идентичный физический процесс (поле) окружающей среды, осуществляют обратное преобразование результата взаимодействия опорного физического процесса (поля) с аналогичным процессом (полем) окружающей среды в электрический композиционный сигнал. Композиционный сигнал раздельно для каждой частоты, выбираемой из исходного начального ряда частот, умножают на фиксированно сдвинутые относительно друг друга по фазе гармонические составляющие опорного сигнала (косинус и синус), но с единичной амплитудой и исходными значениями начальной фазы (на первом такте измерения начальные значения фазы равны нулю). По принятому итерационному алгоритму, например, алгоритму экспоненциального сглаживания, по результатам умножения корректируют начальные значения фазы и амплитуды для каждой составляющей опорного сигнала. Благодаря применению итерационного алгоритма, для установленной размерности сетки частот в соответствии с предложенным способом на основе принципа отрицательной обратной связи выполняют самонастройку параметров косинусных составляющих в соответствии с алгоритмом, аналитически описываемым в соответствии с формулами


где  и Am(nΔt) - амплитуды косинусных составляющих опорного сигнала для m-й гармоники частоты ω на n+1 и n-м временных тактах итерации длительностью Δt;
и Am(nΔt) - амплитуды косинусных составляющих опорного сигнала для m-й гармоники частоты ω на n+1 и n-м временных тактах итерации длительностью Δt;
 и Ψm(nΔt) - фазы косинусных составляющих опорного сигнала для m-й гармоники частоты ω на n+1 и n-м временных тактах итерации длительностью Δt;
и Ψm(nΔt) - фазы косинусных составляющих опорного сигнала для m-й гармоники частоты ω на n+1 и n-м временных тактах итерации длительностью Δt;
ξ(nΔt) - физический процесс окружающей среды, преобразованный в электрический сигнал;
 - i-я косинусная составляющая опорного сигнала;
- i-я косинусная составляющая опорного сигнала;
 - композиционный электрический сигнал, получаемый в результате воздействия преобразованным в физический эквивалент опорным сигналом, равным суперпозиции N косинусных составляющих, на физический процесс окружающей среды ξ(nΔt);
- композиционный электрический сигнал, получаемый в результате воздействия преобразованным в физический эквивалент опорным сигналом, равным суперпозиции N косинусных составляющих, на физический процесс окружающей среды ξ(nΔt);
α - масштабирующий коэффициент, определяющий шаг итерации;
Am[(0)Δt]=0 и ψm[(0)Δt]=0 - начальные значения амплитуд и фаз косинусных составляющих опорного сигнала для m=1, 2, …, N.
Как известно, любой сигнал, удовлетворяющий условиям Дирихле, не ограничивающим техническое применение, можно представить в виде

где Bi - амплитуды косинусных составляющих для i-й гармоники частоты ω;
Фi - фазы косинусных составляющих для i-й гармоники частоты ω.
В результате выполнения L итераций, то есть L тактов измерений, в соответствии с которыми получаем для математического описания результатов самонастройки следующую систему усредненных уравнений


Результат усреднения не зависит от параметра т, поэтому полученное решение справедливо для всех гармоник m=1, 2, 3, …, N, независимо от их количества N (см. фиг.1-4). В статике, то есть когда внешняя среда стационарна, момент уравновешивания опорным процессом процесса, описывающего окружающую физическую среду, соответствует так называемой неподвижной точке, для которой выполняются условия при n>>1


где  и
и  - неподвижные (предельные) точки или стационарные значения фаз и амплитуд для всех гармоник m=1, 2, 3, …, N, независимо от их количества N.
- неподвижные (предельные) точки или стационарные значения фаз и амплитуд для всех гармоник m=1, 2, 3, …, N, независимо от их количества N.
Для стационарных значений фаз и амплитуд для всех гармоник m=1, 2, 3, …, N, независимо от их количества N, т.е. в момент компенсации, получаем систему уравнений
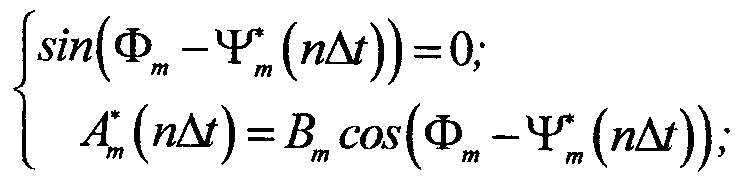
Откуда следует условие компенсации при n→∞

Приведенные итерационные уравнения описывают аналитически алгоритм суперпозиционного взаимодействия преобразованного опорного процесса (поля), с процессом (полем) окружающей среды. Аналитические результаты подтверждены имитационным моделированием. На фиг.1 и 2 приведены по результатам моделирования графики, иллюстрирующие компенсацию одной и трех гармоник входного сигнала соответствующим опорным сигналом. На фиг.3 приведен график, иллюстрирующий эволюцию фазы и амплитуды опорного сигнала в зависимости от числа тактов итераций при компенсации входного сигнала, состоящего из одной гармоники с амплитудой, равной единице, и фазой, равной 1,4. На фиг.4 приведены графики, иллюстрирующие эволюцию фаз и амплитуд опорного сигнала в зависимости от числа тактов итерации при компенсации входного сигнала, состоящего из семи различных гармоник с различными амплитудами и фазами. Нижняя часть графиков описывает переходный (эволюционный) процесс самонастройки амплитуд и фаз косинусных составляющих опорного сигнала. Момент компенсации опорным сигналом физического процесса (поля) окружающей среды соответствует достижению его параметров стационарных значений фаз и амплитуд, которые на графиках фиг.3 и 4 определяются после переходного процесса постоянными величинами, представленными в виде «столбцов». Эти значения фаз и амплитуд получают непосредственно из приведенных выше условий компенсации.
Полученные в виде равенства условия компенсации доказывают не только возможность измерения параметров косинусных составляющих опорного сигнала и его корректировки в зависимости от временного дрейфа спектра сигнала, описывающего физический процесс (поле) окружающей среды, но и его полную активную компенсацию. Причем, форма эволюции процесса компенсации зависит от масштабирующего коэффициента а и соответствует при его определенном значении устойчивому фокусу в виде закручивающейся к неподвижной точке спирали (см. фиг.3). При этом интервал изменения масштабирующего коэффициента а, при котором сохраняется устойчивость процесса компенсации, достаточно велик. На фиг.4 видно, что длительность переходного процесса для гармоник с разной частотой и фазой при одном и том же масштабирующем коэффициенте а может заметно отличаться, поэтому масштабирующий коэффициент целесообразно представлять векторной величиной.
Для достижения технического результата в соответствии с предлагаемым способом устройство для измерения и подавления физических процессов (полей) окружающей среды состоит из блоков и схем, имеющих следующие обозначения: 1 - блок генератора опорного сигнала с самонастраивающейся формой (ГОССФ); 2 - прямой преобразователь электрического сигнала в физический процесс (поле) окружающей среды; 3 - окружающая среда; 4 - обратный преобразователь физического процесса (поля) окружающей среды в электрический сигнал; 5 - блок самонастройки параметров генератора опорного сигнала с самонастраивающейся формой (СПГОССФ), 6 - блок распознавания образов и ситуаций во внешней среде (РОСВС), 7 - блок управления.
Блок 1 ГОССФ состоит из: 8 - генератора-синтезатора сетки частот косинусных составляющих; 9 - схемы изменения фазы сетки частот; 10 - схемы инвертирования и изменения амплитуды сетки частот; 11 - синтезатора-сумматора опорного сигнала; 12 - цифроаналогового преобразователя.
Блок 5 СПГОССФ состоит из: 13 - аналого-цифрового преобразователя; 14 - преобразователя косинуса в синус; 15 - схемы самонастройки фазы; 16 - схемы самонастройки амплитуды; 17 - схемы контроля погрешности и размерности сетки частот.
Блок 6 РОСВС состоит из: 18 - запоминающего устройства признаков (измеренных значений фаз, амплитуд, а также размерности сетки частот косинусных составляющих); 19 - схемы принятия решения.
Преобразователи 2 и 4 электрического сигнала в физический процесс (поле) окружающей среды и обратно реализуются в соответствии с известными принципами. Реализация блока 1 ГОССФ, включающего генератор-синтезатор 8 сетки частот косинусных составляющих, схему 9 изменения фазы сетки частот, схему 10 изменения амплитуды сетки частот, синтезатор-сумматор 11 опорного сигнала, цифроаналоговый преобразователь 12, может быть осуществлена, например, на базе микросхем AD985x, выпускаемых фирмой ANALOG DEVICES серийно. Реализация блока 5 СПГОССФ, включающего: аналого-цифровой преобразователь 13, преобразователь 14 косинуса в синус, схему 15 самонастройки фазы, схему 16 самонастройки амплитуды, схему 17 контроля погрешности и размерности сетки частот, целесообразно реализовать на основе серийных микросхем аналого-цифрового преобразования, например, AD1671, AD7882 и др. и сигнального микропроцессора семейства DSP56000. С целью упрощения и повышения быстродействия реализацию данного блока можно осуществить также на базе программируемых логических интегральных схем, выполняя операцию параллельного умножения в схемах 15 самонастройки фазы и 16 самонастройки амплитуды посредством постоянных запоминающих устройств косинусных и синусных составляющих. На базе аналогичных микросхем может быть осуществлена реализация блока 6 РОСВС и блока 7 управления.
Устройство для измерения параметров и подавления физических процессов (полей) окружающей среды работает следующим образом. Предварительно, в соответствии с предложенным способом, блок 1 ГОССФ, блок 5 СПГОССФ, блок 6 РОСВС в соответствии с предварительно записанной в энергонезависимое запоминающее устройство блока 7 управления управляющей программой устанавливаются в исходное состояние. Управляющая программа реализует приведенный выше алгоритм, в соответствии с которым в устройстве для измерения и подавления физических процессов (полей) окружающей среды выполняются при запуске в указанной ниже последовательности следующие действия и установки:
в режиме измерения и компенсации:
- в блоке 1 ГОССФ устанавливаются:
в генераторе 8 сетки частот косинусных составляющих нулевые значения фаз и единичные значения амплитуд, а также значение размерности сетки частот, равное половине максимально возможной для данного устройства размерности; в схеме 9 изменения фазы сетки частот сохраняется нулевое начальное значение фазы, в схеме 10 изменения амплитуды сетки частот и в схеме 11 синтезатора-сумматора опорного сигнала устанавливаются начальные нулевые значения амплитуд для исходной размерности сетки частот;
- в блоке 5 СПГОССФ устанавливаются в исходные состояния, готовые для принятия информации:
схемы 15 самонастройки фазы и 16 самонастройки амплитуды, а в схему 17 контроля погрешности и размерности сетки частот записывается исходное значение заданной погрешности.
В режиме измерения и компенсации с распознаванием одновременно с перечисленными действиями выполняется дополнительно:
- подключение блока 6 РОСВС либо в режиме предварительного накопления информации по самообучению, либо в режиме работы непосредственного распознавания по априорно записанной информации.
В начальный момент работы при включении устройства в блоке 1 ГОССФ на выходах схемы 11 синтезатора-сумматора частот, схемы 10 изменения амплитуды сетки частот нулевые коды и, следовательно, цифроаналогового преобразователя 12 формируется нулевой электрический сигнал, который поступает на 1-й выход блока 1 ГОССФ. В результате чего на вход преобразователя 2 электрического сигнала в физический процесс (поле) окружающей среды также поступает нулевой входной сигнал. Так как в начальный момент работы на окружающую среду 3 не воздействует преобразованный в соответствующий физический процесс (поле) электрический сигнал, то на выходе преобразователя 4 физического процесса (поля) окружающей среды в электрический сигнал формируется электрический сигнал, пропорциональный только соответствующей энергии физического процесса (поля) окружающей среды. Сигналы со второго выхода блока 1 ГОССФ, представляющие собой в начальный момент запуска инвертированные косинусные составляющие с нулевой подстраиваемой фазой и единичной амплитудой, поступают через второй вход блока 5 СПГОССФ параллельно на вторые входы схемы 15 самонастройки фазы и схемы 16 самонастройки амплитуды. При этом на второй вход схемы 15 самонастройки фазы сигналы со второго входа блока 5 СПГОССФ поступают через преобразователь 14 косинуса в синус за счет дополнительного сдвига фазы на 90°. В схемах 15 самонастройки фазы и 16 самонастройки амплитуды сигнала осуществляется перемножение сдвинутых по фазе на 180° синусных и косинусных составляющих и результатов преобразования аналого-цифровым преобразователем 13 выходного сигнала преобразователя 4 физического процесса (поля) окружающей среды в электрический сигнал для каждой косинусной составляющей с частотой из заданной размерности сетки частот. Результаты перемножения за счет последующего деления для каждой косинусной и синусной составляющей из заданной размерности сетки частот на постоянную величину, т.е. фактически масштабирования, суммируются в соответствии с принятым алгоритмом с результатами выполнения предыдущих аналогичных операций. Деление осуществляется, например, путем сдвига кода произведения во встроенных в схемах 15 самонастройки фазы и 16 самонастройки амплитуды регистрах сдвига. Таким образом, в схемах 15 самонастройки фазы и 16 самонастройки амплитуды осуществляется перемножение и масштабирование в цифровом виде соответствующих кодов с последующим в соответствии с алгоритмом функционирования накапливающим сложением результатов масштабированного умножения. На первом такте измерения (итерации) в момент запуска в схемах 15 самонастройки фазы и 16 самонастройки амплитуды осуществляется одновременно перемножение для каждой сдвинутой по фазе на 180° косинусной и синусной составляющих из заданной размерности сетки частот на результаты преобразования и масштабирование результатов перемножения только самого физического процесса (поля) окружающей среды. Полученные результаты в схеме 15 самонастройки фазы и 16 самонастройки амплитуды значения фазы и амплитуды запоминаются после первого такта итерации (измерения) в виде исходного значения искомых фазы и амплитуды косинусных составляющих опорного сигнала. Эти значения фазы и амплитуды после первого такта измерения поступают с выходов схем 15 самонастройки фазы и 16 самонастройки амплитуды значения через первый и второй выходы блока 5 СПГОССФ и первый и второй входы блока 1 ГОССФ на вторые входы схемы 9 изменения фазы сетки частот и схемы 10 изменения амплитуды сетки частот. В схемах 9 изменения фазы и 10 изменения амплитуды сетки частот соответственно на следующем такте измерения осуществляется изменение фазы и амплитуды косинусных составляющих опорного сигнала на величины, равные скорректированным на первом такте измерения значениям фаз и амплитуд. Скорректированные значения по фазе, но с единичной амплитудой, косинусные составляющие установленной размерности сетки частот поступают с первого выхода схемы 9 изменения фазы сетки частот на вход схемы 10 изменения амплитуды сетки частот. На второй выход блока 1 ГОССФ скорректированные значения по фазе, но с единичной амплитудой, косинусные составляющие установленной размерности сетки частот поступают со второго выхода схемы 9 изменения фазы сетки частот после инвертирования (сдвига на 180°). В схеме 10 изменения амплитуды сетки частот косинусные составляющие сетки частот с единичной амплитудой перемножаются на величину кода, соответствующего скорректированному на первом такте измерения значению, поступающему по соответствующей цепи с выхода схемы 16 самонастройки амплитуды блока 5 СПГОССФ. В результате перемножения уже скорректированные по амплитуде и фазе косинусные составляющие установленной размерности сетки частот поступают с выхода схемы 10 изменения амплитуды сетки частот на вход схемы 11 синтезатора-сумматора опорного сигнала. На схеме 11 синтезатора-сумматора опорного сигнала происходит суммирование всех скорректированных по первому такту измерения косинусных составляющих для заданной размерности сетки частот, поэтому изменение сигнала на выходе цифроаналогового преобразователя 12 осуществляется в момент окончания полного суммирования косинусных составляющих по всей заданной размерности сетки частот. Скорректированный опорный сигнал с выхода цифроаналогового преобразователя 12 поступает на вход преобразователя 2 электрического сигнала в физический процесс (поле) окружающей среды. При суммировании косинусных составляющих и преобразовании результата суммирования в электрический сигнал аналоговой формы на каждом такте итерации по установленной размерности сетки частот осуществляется кусочно-ступенчатое восстановление по дискретным отчетам изменяющегося во времени опорного сигнала. При этом в составе цифроаналогового преобразователя 12 на его выходе для устранения высокочастотной составляющей кусочно-ступенчатой погрешности интерполяции предусмотрен встроенный сглаживающий, так называемый, антиимиждинговый фильтр. Однако можно осуществить и другие виды восстановления опорного сигнала путем некоторого усложнения связки схем 11 синтезатора-сумматора опорного сигнала и цифроаналогового преобразователя 12, например кусочно-линейного восстановления. Известно, что кусочно-линейное восстановление при одной и той же погрешности восстановления требует почти на порядок меньше дискретных отсчетов аналогового сигнала. После преобразования скорректированного электрического значения опорного сигнала в физический процесс (поле) окружающей среды в преобразователе 2 электрического сигнала в физический процесс (поле) окружающей среды его суперпозиция с физическим процессом (полем) окружающей среды преобразуется в электрический сигнал преобразователем 4 физического процесса (поля) окружающей среды в композиционный электрический сигнал. Преобразованный композиционный сигнал поступает через первый вход блока 5 СПГОССФ на вход аналого-цифрового преобразователя 13. По результатам преобразования композиционного сигнала начинается второй такт измерения и самонастройки параметров опорного сигнала.
Многократное выполнение рассмотренных операций в устройстве реализует в соответствии с вышеописанным и исследованным на сходимость алгоритмом самонастройку параметров опорного процесса (поля) и подавление энергии окружающей среды, в том числе доли энергии, отраженной от объекта в виде эхо-сигнала, содержащего само рассматриваемое устройство. В результате чего выполняется функция маскирования объекта при его облучении внешним физическим процессом (полем) из-за отсутствия отраженного сигнала - эхо-сигнала.
Настройка размерности сетки частот косинусных составляющих осуществляется посредством схемы 17 контроля погрешности и размерности сетки частот следующим образом. С первого входа блока 5 СПГОССФ на вход схемы 17 контроля погрешности и размерности сетки частот поступает через аналого-цифровой преобразователь 13 цифровой композиционный сигнал, который сравнивается, например, по абсолютному значению с заданной величиной (уставкой). Если, например, абсолютное значение композиционного сигнала, эквивалентного соответствующему физическому процессу (полю) окружающей среды, больше (меньше) уставки, то сетка частот увеличивается (уменьшается) на заданную величину, например, на единицу. Поскольку в начальный момент абсолютное значение физического процесса (поля) окружающей среды, пропорциональное величине меры энергии композиционного электрического сигнала, всегда больше фиксированной уставки, то сетка частот всегда сначала увеличивается. Для ослабления этого эффекта допускается применение плавающей уставки.
Контроль о погрешности компенсации энергии окружающей среды посредством схемы 17 контроля погрешности и размерности сетки частот позволяет также оценить и учесть составляющую погрешности измерения из-за нелинейного взаимодействия опорного случайного процесса (поля) с окружающей средой. При этом составляющая этой погрешности значительно меньше погрешности компенсации энергии внешнего физического процесса (поля) опорным сигналом.
По существу принципиального отличия подавления энергии процесса окружающей среды от подавления энергии поля окружающей среды нет. Действительно, для подавления энергии поля окружающей среды увеличивается только количество идентичных каналов и, следовательно, количество преобразователей 2 электрического сигнала в физический процесс (поле) окружающей среды и 4 физического процесса (поля) окружающей среды в электрический сигнал. При этом расположение преобразователей 2 электрического сигнала в физический процесс (поле) окружающей среды и 4 физического процесса (поля) окружающей среды в электрический сигнал относительно друг друга зависит от пространственных характеристик поля и занимаемого им пространства. Количество преобразователей может корректироваться в зависимости от качества подавления энергии поля с учетом его характеристик. Аналогичное увеличение соответствующих преобразователей и каналов осуществляется при одновременном подавлении различных по своей природе физических процессов (полей) окружающей среды.
При самонастройке параметров опорного сигнала: амплитуд, фаз и размерности сетки частот косинусных составляющих опорного сигнала фактически осуществляется их измерение в реальном масштабе времени в широком динамическом диапазоне, в результате чего и возникает новое качество по распознаванию формы физического процесса (поля) окружающей среды, расширяющее функциональные возможности устройства. Это новое качество обусловлено тем, что измеренные параметры опорного сигнала используются в качестве признаков формы физического процесса (поля) окружающей среды. При этом для достижения инвариантности критерия распознавания к амплитуде косинусных составляющих, т.е. к масштабу при сохранении формы физического процесса (поля) окружающей среды, достаточно пронормировать любым известным способом амплитуды косинусных составляющих. Для других признаков, а именно для фаз косинусных составляющих и размерности сетки частот нормировка не требуется. Однако при необходимости для обеспечения инвариантности к групповому сдвигу фаз косинусных составляющих можно использовать в качестве дополнительной обработки известные корреляционные методы.
Функция распознавания в устройстве реализуется в блоке 6 РОСВС следующим образом. Скорректированные значения фазы и амплитуды косинусных составляющих с выходов схем 15 самонастройки фазы и 16 самонастройки амплитуды поступают через первый и второй выходы блока 5 СПГОССФ и первый и второй входы блока 6 РОСВС на первый и второй входы запоминающего устройства 18 признаков и схемы 19 принятия решения. При этом по результатам контроля погрешности измерения, которое осуществляется в схеме 17 контроля погрешности и размерности сетки частот посредством блока 7 управления, в момент наилучшей компенсации по управляющему входу-выходу выдается команда в блок 6 РОСВС с входа-выхода блока 7 управления на запоминание измеренных значений фаз, амплитуд, а также размерности сетки частот косинусных составляющих. Размерность сетки частот косинусных составляющих считывается через управляющий вход-выход генератора-синтезатора 8 сетки частот косинусных составляющих по команде блока 7 управления. Процесс распознавания осуществляется путем сравнения по любому известному критерию полученных и обработанных признаков с набором (множеством) эталонных значений признаков. При этом набор эталонных значений признаков в зависимости от решаемой задачи может быть записан в запоминающее устройство 18 признаков либо априори, либо в результате предварительного «обучения» по определенным «фантомам» физического процесса (поля) окружающей среды.
При обнаружении и распознавании внешнего объекта, доля искажения энергии от которого попадает в область окружающей среды, находящуюся под воздействием опорного случайного процесса (поля), и определении координат его местонахождения по величине и форме искажения исходного, не искаженного физического процесса (поля) окружающей среды осуществляется путем сравнения по любому известному критерию полученных и обработанных признаков в текущий момент времени с набором (множеством) значений признаков, записанным в запоминающее устройство 18 признаков в предыдущие моменты времени. При этом процесс записи и сравнение набора признаков осуществляется в дискретные моменты времени при сохранении непрерывного режима измерения в соответствии с принятым итерационным алгоритмом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| Способ оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763125C1 |
| СКВАЖИННОЕ УСТРОЙСТВО И СПОСОБ ЭЛЕКТРОМАГНИТНОГО ЗОНДИРОВАНИЯ В ПРОЦЕССЕ БУРЕНИЯ | 2023 |
|
RU2829287C1 |
| Самонастраивающийся измерительный преобразователь | 1976 |
|
SU658483A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2240073C1 |

Изобретение относится к измерительной технике и технической кибернетике. Технический результат заключается в обеспечении функции измерения параметров и характеристик входного сигнала, активного подавления энергии и решении задачи измерения изменяющегося физического процесса (поля) окружающей среды путем воздействия на него преобразованным в эквивалентный физический процесс (поле) опорным сигналом, также маскирования объекта, обнаружение которого осуществляется последующей специальной обработкой дистанционно принимаемой отраженной от объекта доли энергии - эхо сигнала, по результатам воздействия на этот объект определенным физическим процессом (полем), сформированным зондирующим сигналом. Способ основан на том, что посредствам самонастраивающегося опорного процесса (поля), по установленному начальному значению числа членов ряда частот (размерности сетки частот), фаз и амплитуд формируют конечное начальное число исходных косинусных гармонических составляющих, из которых суммированием синтезируют опорный электрический сигнал и преобразуют его в опорный физический процесс (поле). Излучением в окружающую среду преобразованным в опорный физический процесс (поле) синтезированным опорным электрическим сигналом компенсационно воздействуют на физический процесс (поле) окружающей среды и в реальном масштабе времени осуществляют обратное преобразование результата взаимодействия опорного физического процесса (поля) с физическим процессом (полем) окружающей среды в электрический композиционный сигнал. По полученному электрическому композиционному сигналу посредством квадратурной демодуляции осуществляют для установленной размерности сетки частот на основе принципа отрицательной обратной связи самонастройку для каждой косинусной составляющей опорного сигнала начальные значения параметров - амплитуды и фазы. В результате самонастройки параметров косинусных составляющих и размерности сетки частот опорного сигнала, получают в реальном масштабе времени измеренные значения фаз и амплитуд косинусных составляющих и форму изменения физического процесса (поля) окружающей среды и, тем самым, энергию окружающей среды в динамике, которой компенсационно подавляют энергию физических процессов (полей) окружающей среды. Для распознавания формы физического процесса (поля) окружающей среды, распознавания факта преднамеренного или не преднамеренного вторжения иного источника энергии и установления его образа и координат, используют в качестве признаков измеренные значения фаз и амплитуд косинусных составляющих опорного сигнала, а также размерность сетки частот, фиксирующих пространственное изменение формы физического процесса (поля) окружающей среды, которые сравнивают с результатами измерения на предшествующих им последующих тактах измерения. В качестве опорного физического процесса (поля) и физического процесса (поля) окружающей среды используют либо акустические, либо электромагнитные, либо иные сигналы, либо их композицию. Другой вариант - устройство содержит прямой преобразователь электрического сигнала в физический процесс (поле) окружающей среды, обратный преобразователь физического процесса (поля) окружающей среды в электрический сигнал, блок распознавания образов и ситуаций во внешней среде, блок управления, блок генератора опорного сигнала с самонастраивающейся формой и блок самонастройки параметров генератора опорного сигнала с самонастраивающейся формой. 2 н. и 8 з.п. ф-лы, 5 ил.
1. Способ измерения и подавления физических процессов (полей) окружающей среды посредством самонастраивающегося опорного процесса (поля), заключающийся в том, что в соответствии с установленными начальными значениями ряда частот, фаз и амплитуд формируют исходные косинусные гармонические составляющие, из которых суммированием синтезируют опорный электрический сигнал и преобразуют его в опорный физический процесс (поле), излучением в окружающую среду воздействуют сформированным опорным физическим процессом (полем) на физический процесс (поле) окружающей среды и в реальном масштабе времени осуществляют обратное преобразование результата взаимодействия опорного физического процесса (поля) с процессом (полем) окружающей среды в электрический композиционный сигнал, который умножают раздельно по каждой частоте на косинусные и полученные из него дополнительные синусные гармонические составляющие с единичными амплитудами и фазами, сдвинутыми на 180° или π рад относительно исходных косинусных составляющих опорного электрического сигнала, по результатам умножения раздельно для каждой косинусной и синусной дополнительным составляющим корректируют в соответствии с выбранным итерационным алгоритмом усреднения, например, экспоненциальным сглаживанием, начальные значения амплитуд и фаз исходных косинусных гармонических составляющих и тем самым осуществляют для установленной размерности сетки частот на основе принципа отрицательной обратной связи самонастройку для каждой косинусной гармонической составляющей опорного сигнала начальные значения параметров - амплитуды и фазы, по которым вновь синтезируют на следующем временном такте уже скорректированный опорный сигнал и соответственно физический процесс (поле), которым излучением воздействуют на физический процесс (поле) окружающей среды, по результатам воздействия которого и результатам воздействия на последующих тактах итерации непрерывно повторяют описанные действия, при выполнении которых после переходного процесса, осуществляют за счет самонастройки параметров составляющих косинусных сигналов компенсацию энергии окружающей среды, преобразованным в эквивалентную энергию физического процесса (поля) синтезированным опорным процессом (полем), по результатам самонастройки параметров косинусных составляющих получают в реальном масштабе времени измеренные значения фаз и амплитуд косинусных составляющих и форму изменения физического процесса (поля) окружающей среды и тем самым энергию окружающей среды в динамике, которой компенсационно подавляют энергию физических процессов (полей) окружающей среды.
2. Способ по п.1, отличающийся тем, что начальное значение размерности сетки частот косинусных составляющих корректируют по принципу отрицательной обратной связи в зависимости от величины меры энергии композиционного электрического сигнала в темпе с самонастройкой параметров косинусных составляющих опорного сигнала.
3. Способ по п.1, отличающийся тем, что размерность сетки частот и измеренные значения фаз и амплитуд косинусных составляющих опорного сигнала используют в качестве признаков для распознавания формы физического процесса (поля) окружающей среды.
4. Способ по п.1, отличающийся тем, что размерность сетки частот и измеренные значения фаз и амплитуд косинусных составляющих опорного сигнала используют в качестве признаков для распознавания факта преднамеренного или непреднамеренного изменения формы физического процесса (поля) окружающей среды, например, из-за вторжения иного источника энергии.
5. Способ по п.1, отличающийся тем, что эффект подавления энергии физических процессов (полей) окружающей среды используют для маскирования самого источника синтезированного опорного процесса (поля).
6. Способ по п.1, отличающийся тем, что в качестве составляющих опорного сигнала устанавливают ортогональные периодические сигналы с самонастраивающимися параметрами.
7. Способ по п.1, отличающийся тем, что опорный физический процесс или поле и физический процесс или поле окружающей среды представляют собой звуковые или ультразвуковые сигналы.
8. Способ по п.1, отличающийся тем, что опорный физический процесс или поле и физический процесс или поле окружающей среды представляют собой электромагнитные сигналы.
9. Способ по п.1, отличающийся тем, что опорный физический процесс (поле) формируется одновременно и независимо для различных физических процессов (полей) окружающей среды.
10. Устройство для измерения параметров и подавления физических процессов (полей) окружающей среды, отличающееся тем, что в него введены блок генератора опорного сигнала с самонастраивающейся формой, прямой преобразователь электрического сигнала в физический процесс (поле) окружающей среды, обратный преобразователь физического процесса (поля) окружающей среды в электрический сигнал, блок распознавания образов и ситуаций во внешней среде и блок управления, а функцию схемы сравнения выполняет окружающая среда, при этом блок генератора опорного сигнала с самонастраивающейся формой по первому выходу соединен с входом прямого преобразователя электрического сигнала в физический процесс (поле) окружающей среды, а по второму выходу соединен соответственно со вторым входом блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой, первый вход которого соединен с выходом обратного преобразователя физического процесса (поля) окружающей среды в электрический сигнал, а первый и второй выходы параллельно подключены к первому и второму входам блока распознавания образов и ситуаций во внешней среде и к первому и второму входам блока генератора опорного сигнала с самонастраивающейся формой, третий вход которого соединен с третьим выходом блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой, выход и вход прямого и обратного преобразователей электрического сигнала в физический процесс (поле) окружающей среды и физического процесса (поля) окружающей среды в электрический сигнал соединены непосредственно с окружающей средой, блок управления по управляющему входу-выходу параллельно соединен соответственно с управляющими входами-выходами генератора опорного сигнала с самонастраивающейся формой, блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой и с блоком распознавания образов и ситуаций во внешней среде, при этом блок генератора опорного сигнала с самонастраивающейся формой состоит из генератора-синтезатора сетки частот косинусных составляющих, схемы изменения фазы для сетки частот, схемы изменения амплитуды для сетки частот, синтезатора-сумматора опорного сигнала, цифроаналогового преобразователя, причем выход генератора-синтезатора сетки частот косинусных составляющих соединен с первым входом схемы изменения фазы для сетки частот, первый выход которой соединен с входом схемы изменения амплитуды сетки частот, а второй выход соединен со вторым выходом блока генератора опорного сигнала с самонастраивающейся формой, выход схемы изменения амплитуды сетки частот соединен с входом синтезатора-сумматора опорного сигнала, выход которого через цифроаналоговый преобразователь соединен с первым выходом блока генератора опорного сигнала с самонастраивающейся формой, а управляющие входы-выходы генератора-синтезатора сетки частот косинусных составляющих, схем изменения фазы и амплитуды для сетки частот, синтезатора-сумматора опорного сигнала соединены с управляющим входом-выходом блока генератора опорного сигнала с самонастраивающейся формой, блок самонастройки параметров генератора опорного сигнала с самонастраивающейся формой состоит из аналого-цифрового преобразователя, преобразователя косинуса в синус, схемы самонастройки фазы, схемы самонастройки амплитуды, схемы контроля погрешности и размерности сетки частот, при этом первый вход блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой через аналого-цифровой преобразователь параллельно соединен с первыми входами схемы самонастройки фазы, схемы самонастройки амплитуды и входом схемы контроля погрешности и размерности сетки частот, второй вход блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой параллельно соединен со вторым входом схемы самонастройки амплитуды и входом преобразователя косинуса в синус, выход которого подключен ко второму входу схемы самонастройки фазы, выход схемы самонастройки фазы соединен с первым выходом блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой, второй и третий выходы которого соединены соответственно с выходом схемы самонастройки амплитуды и схемы контроля погрешности и размерности сетки частот, управляющие входы-выходы схемы самонастройки фазы, схемы самонастройки амплитуды, аналого-цифрового преобразователя и схемы контроля погрешности и размерности сетки частот соединены с управляющим входом-выходом блока самонастройки параметров генератора опорного сигнала с самонастраивающейся формой, блок распознавания образов и ситуаций во внешней среде состоит из запоминающего устройства признаков и схемы принятия решения, при этом первый и второй входы схемы принятия решения и запоминающего устройства признаков соединены параллельно с первым и вторым входами блока распознавания образов и ситуаций во внешней среде, а третий вход блока принятия решений соединен с выходом запоминающего устройства признаков, управляющие входы-выходы запоминающего устройства признаков и схемы принятия решения соединены с управляющим входом-выходом блока распознавания образов и ситуаций во внешней среде.
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ФУНКЦИИ РАСПРЕДЕЛЕНИЯ | 0 |
|
SU354431A1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037190C1 |
| RU 2004110987 A, 20.09.2005 | |||
| Многоканальное устройство регистрации измеряемых величин | 1982 |
|
SU1070581A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ФУНКЦИЙ РАСПРЕДЕЛЕНИЯ СЛУЧАЙНЫХ СИГНАЛОВ | 0 |
|
SU370617A1 |

