Изобретение относится к сенсорному устройству для измерения усилий и/или моментов, передаваемых посредством жесткого передаточного элемента, причем сенсорное устройство посредством первого вывода соединяется с первой частью передаточного элемента, а посредством второго вывода - со второй его частью и оснащено механико-электрическими сенсорными элементами для преобразования механических параметров в электрические.
Изобретение относится также к применению такого сенсорного устройства в искусственной конечности, в частности ножном протезе.
Известны сенсорные устройства, с помощью которых должен осуществляться анализ походки пациента. Поскольку сенсорные устройства имеют очень большой объем, они должны встраиваться в испытательные протезы, которые должны максимально соответствовать используемым на практике протезам. Из-за иной конструкции испытательного протеза и измененных за счет сенсорного устройства весовых соотношений возможен, однако, только такой анализ походки, который при определенных обстоятельствах лишь очень ограниченно соответствует характеру походки с используемым на практике протезом.
Далее предпринимались попытки установить на снабженной протезом конечности сенсорное устройство, выполненное с акселерометрами. Такое устройство может быть использовано для анализа динамики походки, однако оно не позволяет проводить измерений нагрузок на протез в состоянии покоя или при статических движениях.
Из DE 10139333 А1 известен протез, состоящий из бедра, коленного сустава, голени и ступни, в котором голень выполнена для размещения сенсорного устройства. Оно предназначено для измерительно-технического отделения осевых нагрузок от изгибающих нагрузок. Оно состоит из рамки с согнутыми боковыми ребрами для измерения изгибающей нагрузки и среднего тонкого ребра для измерения вертикальной (осевой) нагрузки.
Потребность определять усилия и/или крутящие моменты существует не только для протезов, но и для других многочисленных областей применения, например, для расчета и управления руками роботов.
В основу изобретения положена задача создания сенсорного устройства описанного выше рода, которое можно было установить в небольшом пространстве и которое обеспечивало бы надежное измерение статических и динамических нагрузок.
Эта задача решается посредством сенсорного устройства описанного выше рода, отличающегося тем, что оно имеет окружающий первый вывод первый фланец, который через перпендикулярные ему ножки соединен с ориентированным параллельно ему вторым фланцем, причем промежуток между ножками больше их ширины, на втором фланце расположен второй вывод, при этом сенсорные элементы рассчитаны на определение растяжений или сжатий и расположены, по меньшей мере, на одной из обеих поверхностей второго фланца рядом с ножками.
Предложенное в изобретении сенсорное устройство обеспечивает надежную передачу усилий от первого вывода к расположенному преимущественно по центру на втором фланце второму выводу и наоборот, причем переданные усилия обнаруживаются за счет измерения минимальных деформаций второго фланца. Благодаря передаче усилий между обоими фланцами посредством ножек деформации концентрируются на участках соседней с ножками поверхности второго фланца и могут быть обнаружены там с помощью реагирующих на растяжение и сжатие сенсорных элементов. Ножки, высота которых преимущественно превышает их ширину, способствует разъединению обоих фланцев, которое обеспечивает передачу усилий, а, с другой стороны, концентрирует деформации на одном из фланцев, здесь - на втором, так что в отношении деформаций, т.е. в отношении измерительного эффекта, достигается разъединение обоих фланцев.
В одном предпочтительном варианте осуществления изобретения сенсорные элементы для восприятия растяжений и сжатий расположены на обеих поверхностях второго фланца. За счет обеспечиваемого этим дифференцирования между растяжениями и сжатиями вид переданных усилий и/или моментов можно определить с высокой надежностью. Далее можно получить увеличенные измерительные сигналы, если находящиеся на верхней и нижней сторонах второго фланца сенсорные элементы подходящим образом электрически соединить между собой.
В одном предпочтительном варианте осуществления изобретения сенсорное устройство выполнено из двух частей - первой части с первым фланцем и второй части со вторым фланцем и ножками, причем обе части жестко соединяются между собой, например, посредством резьбового соединения. Резьбовое соединение может осуществляться предпочтительно через ножки, если они снабжены резьбовым отверстием для крепежного винта.
Первый вывод сенсорного устройства выполнен преимущественно шляпообразным цилиндрического сечения, к которому примыкает первый фланец. Шляпообразный вывод может преимущественно перекрывать известную регулировочную пирамиду и может быть снабжен сквозными резьбовыми отверстиями для воздействующих на ее плоские поверхности регулировочных винтов.
Второй вывод может быть выполнен, например, с регулировочной пирамидой, которая через выпуклость переходит во второй фланец.
Преимущественно сенсорные элементы представляют собой тензорезисторы, которые в одном предпочтительном варианте осуществления изобретения позиционированы для восприятия линейных растяжений или сжатий.
На положение преимущественно линейных растягивающихся и сжимающихся участков можно повлиять на втором фланце за счет выполнения выемок. Выемки могут быть круглыми отверстиями, а также сквозными отверстиями произвольными, например, приблизительно треугольной внешней формы.
Преимущественно первый и второй фланцы имеют четырехугольную форму, и на углах обоих фланцев предусмотрены четыре ножки для их соединения. Выемки, служащие для позиционирования растягивающихся и сжимающихся участков на втором фланце, находятся преимущественно между вторым выводом и ножками, т.е. по диагонали преимущественно квадратного второго фланца.
Благодаря такой конструкции удается выполнить проходящие параллельно кромкам второго фланца от выемок линейные растягивающиеся или сжимающиеся участки параллельно кромкам второго фланца, так что здесь позиционируются тензорезисторы.
Сенсорное устройство может быть реализовано в очень маленьком пространстве и требует конструктивной высоты не более 2-3 см.
Таким образом, сенсорное устройство может быть согласовано с величиной и массой, например, вращательного адаптера, который располагается в ножном протезе непосредственно над искусственным коленным суставом. Обеспечивающий дополнительное вращение вращательный адаптер такого протеза может быть вполне заменен сенсорным устройством, так что необходимые для анализа походки усилия и моменты могут быть определены на протезе, изготовленном для последующего использования пациентом. Определение нагрузок может проводиться, тем самым, на окончательном протезе, причем оптимизация возможна за счет регулировок протеза.
Сенсорное устройство пригодно также для длительной установки в протез с целью проведения длительных исследований.
Изобретение более подробно поясняется на примере его осуществления, изображенном на чертеже, на котором представляют:
фиг.1: перспективный вид сбоку первой части сенсорного устройства;
фиг.2: перспективный вид наискось снизу первой части фиг.1;
фиг.3: перспективный вид сбоку второй части сенсорного устройства;
фиг.4: перспективный вид наискось снизу второй части фиг.3;
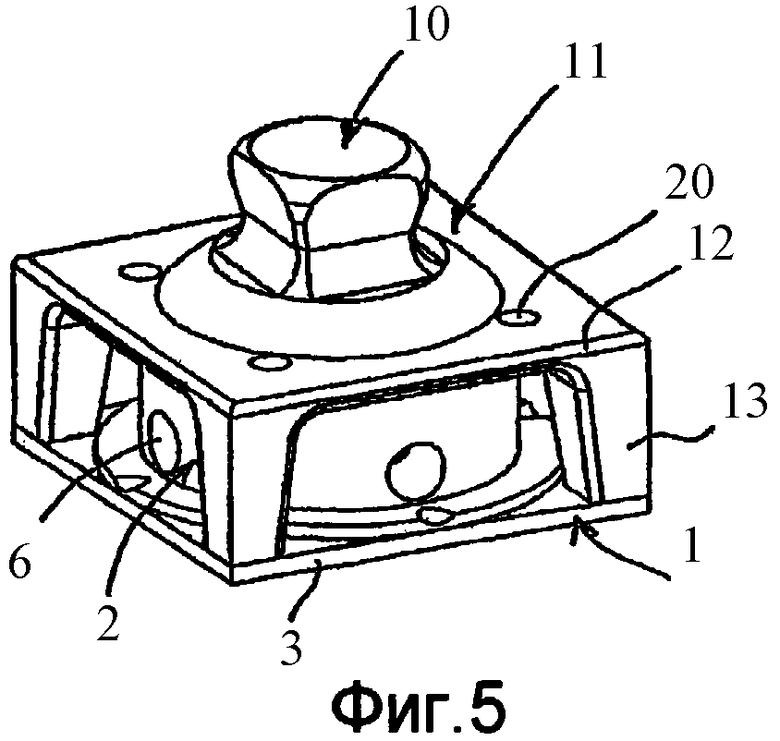
фиг.5: перспективный вид сбоку сенсорного устройства, составленного из обеих частей;
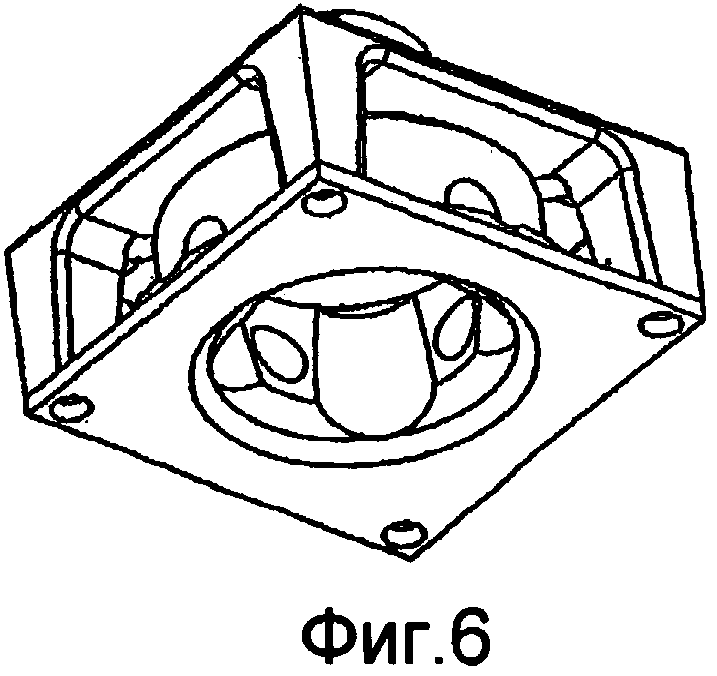
фиг.6: перспективный вид наискось снизу сенсорного устройства фиг.5;
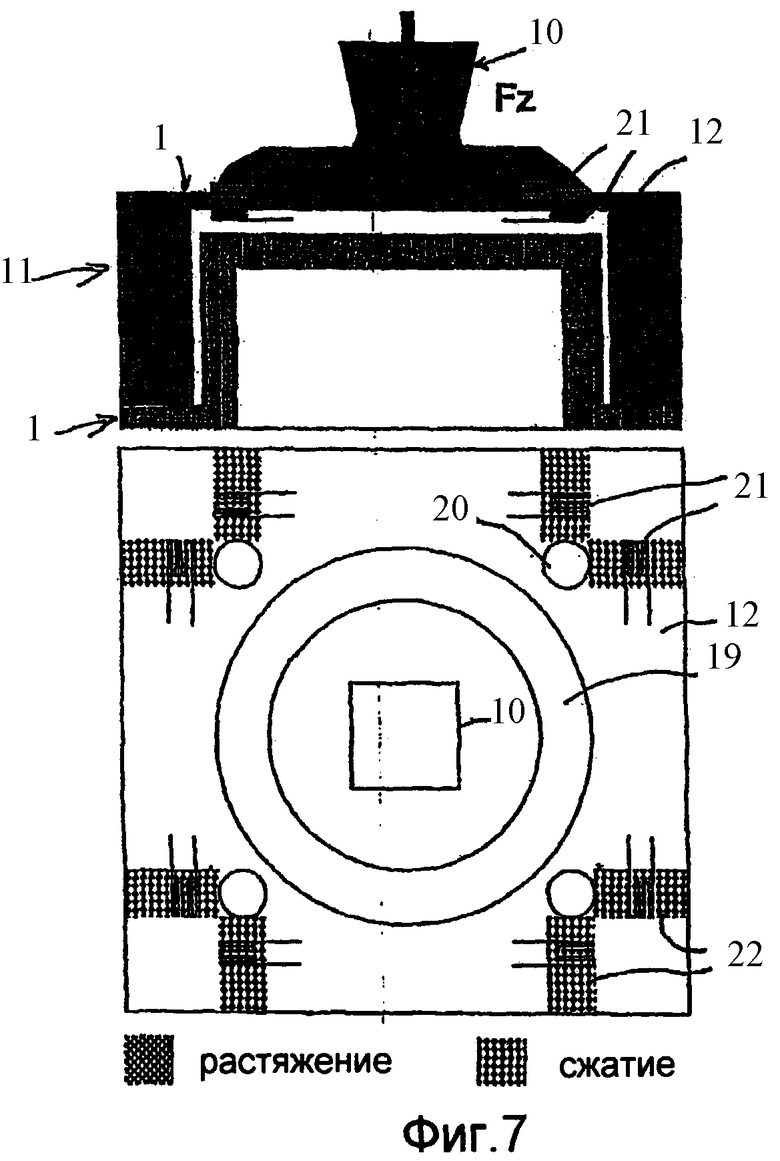
фиг.7: схематичный разрез сенсорного устройства для осевой нагрузки (направление z) со схематичным изображением линейных сжимающихся участков на втором фланце;
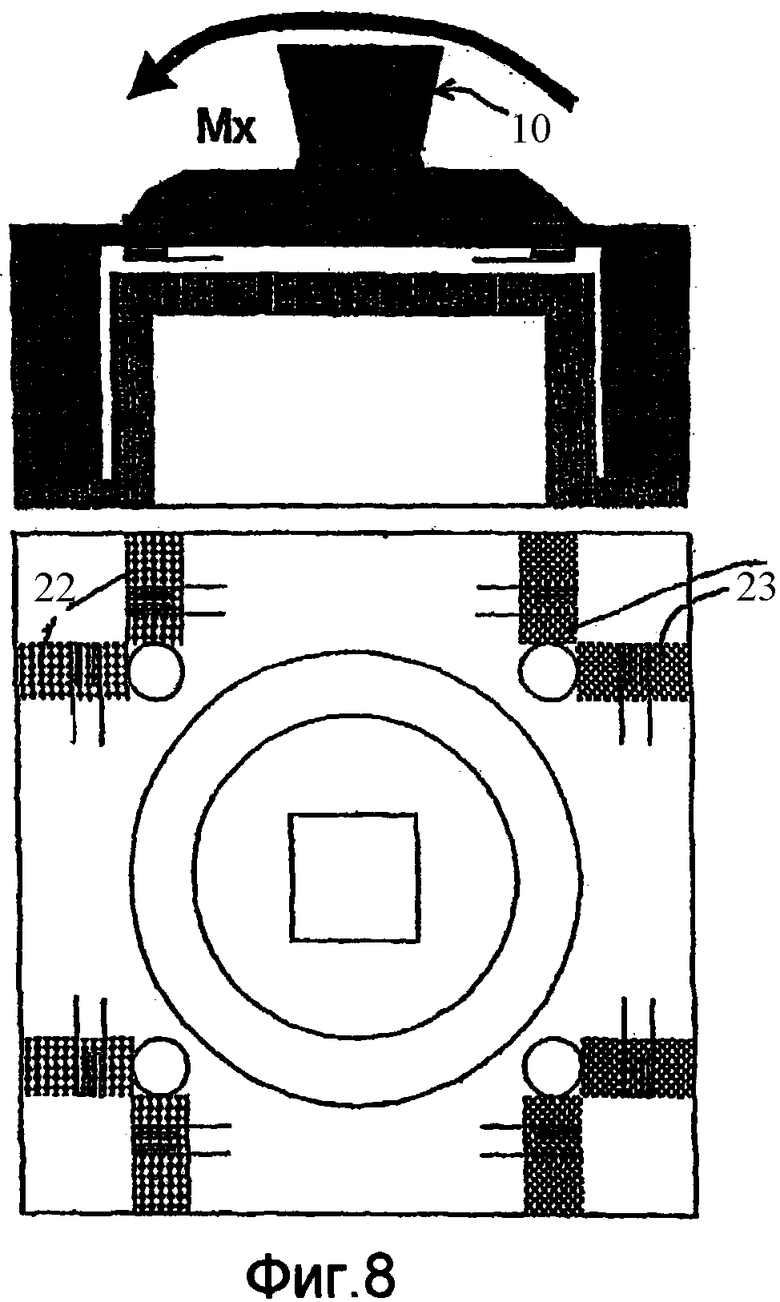
фиг.8: то же, что и на фиг.7, для крутящего момента вокруг горизонтальной оси (ось х);
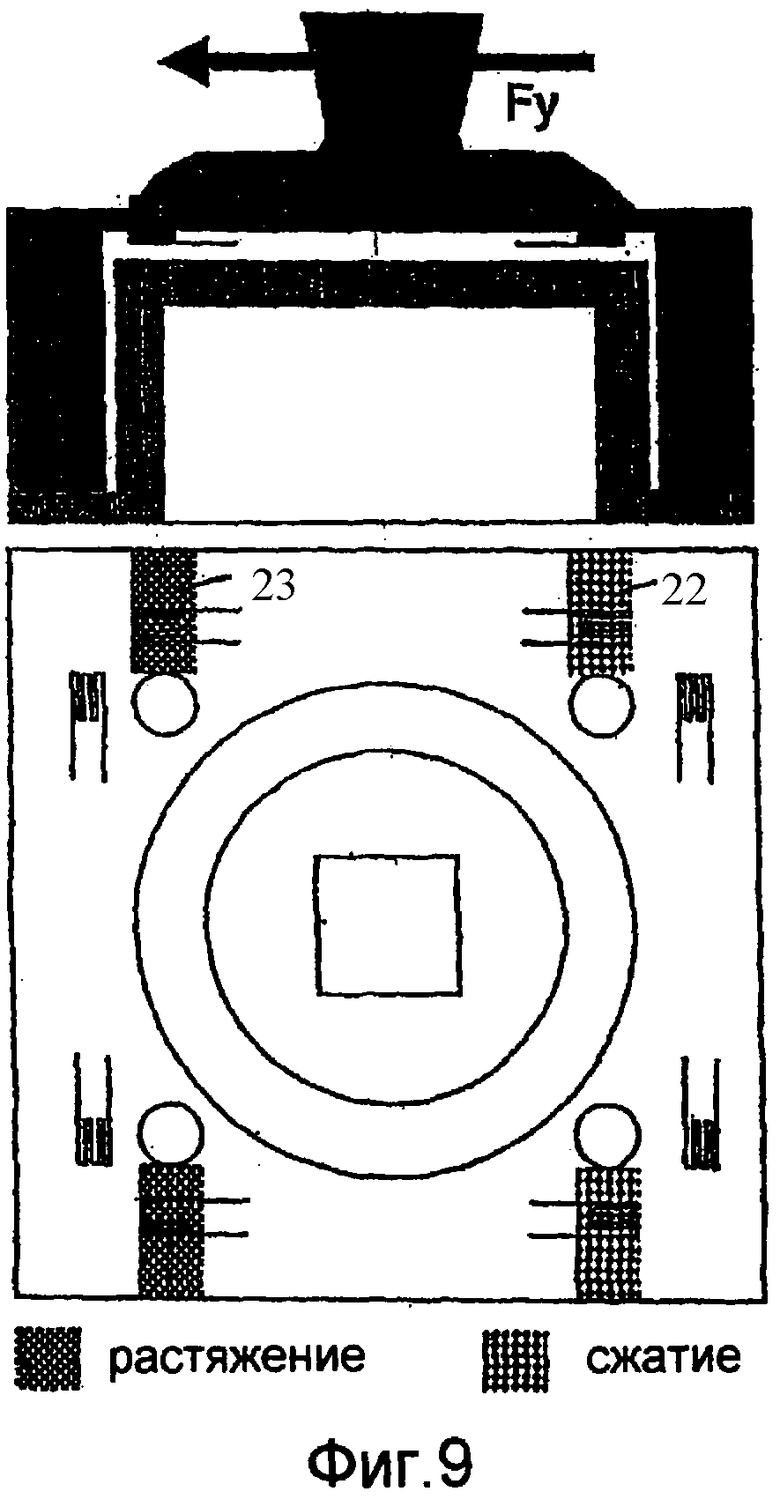
фиг.9: то же, что и на фиг.7, для воздействующего бокового усилия;
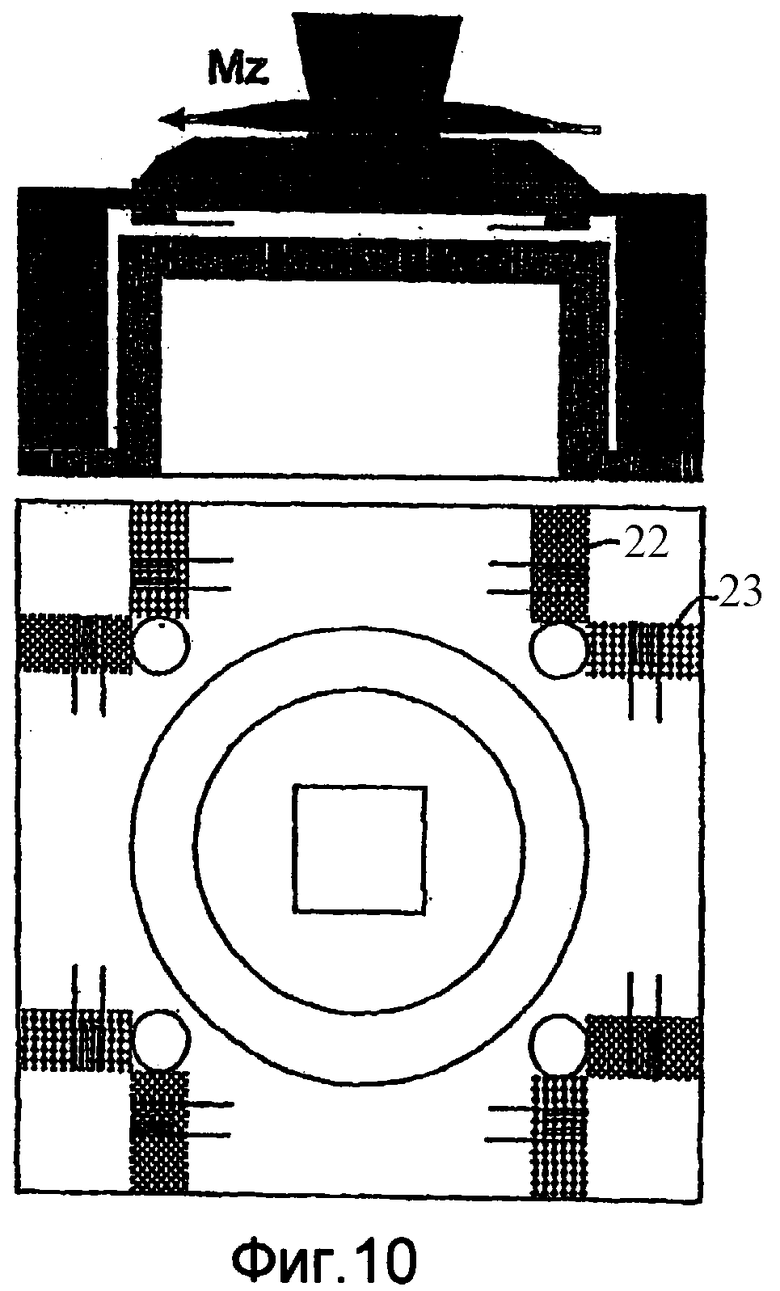
фиг.10: то же, что и на фиг.7, для крутящего момента вокруг вертикальной оси (ось z).
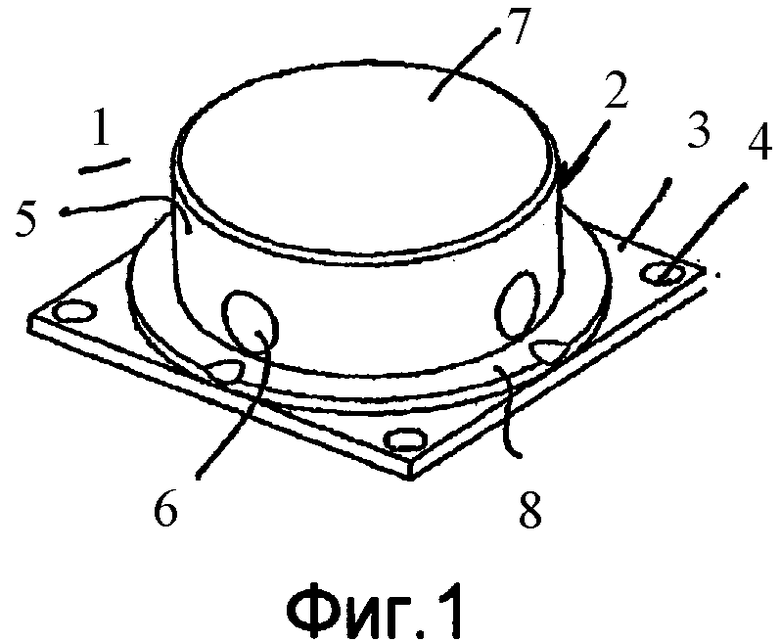
На фиг.1-6 изображена конструкция первого примера выполнения сенсорного устройства. Оно состоит из первой части 1, выполненной из шляпообразного цилиндрического вывода 2 и примыкающего к нему квадратного фланца 3. Фланец 3 имеет на своих углах сквозные отверстия 4 для крепежных винтов (не показаны).
Вывод 2 имеет цилиндрическую боковую стенку 5, в которой со смещением на 90° выполнены резьбовые отверстия 6. На своей верхней стороне вывод 2 имеет дно 7 в форме кругового цилиндра, а на нижней стороне - бортик 8 в форме кругового кольца, который соединен как одно целое с прямоугольным фланцем 3 и усиливает его.
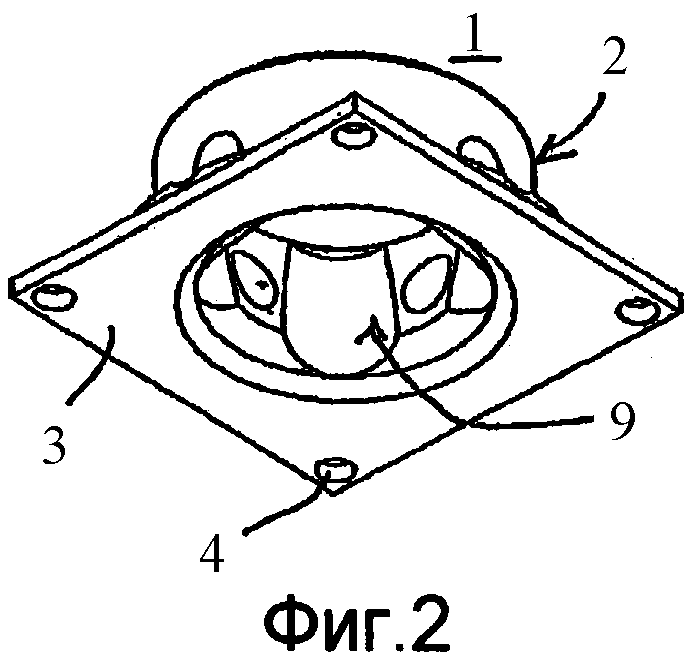
На фиг.2 вывод 2 имеет приблизительно прямоугольное посадочное гнездо 9, служащее для размещения регулировочного адаптера, имеющего четыре наклонные регулировочные поверхности, в которые упираются ввинченные в резьбовые отверстия 6 регулировочные винты.
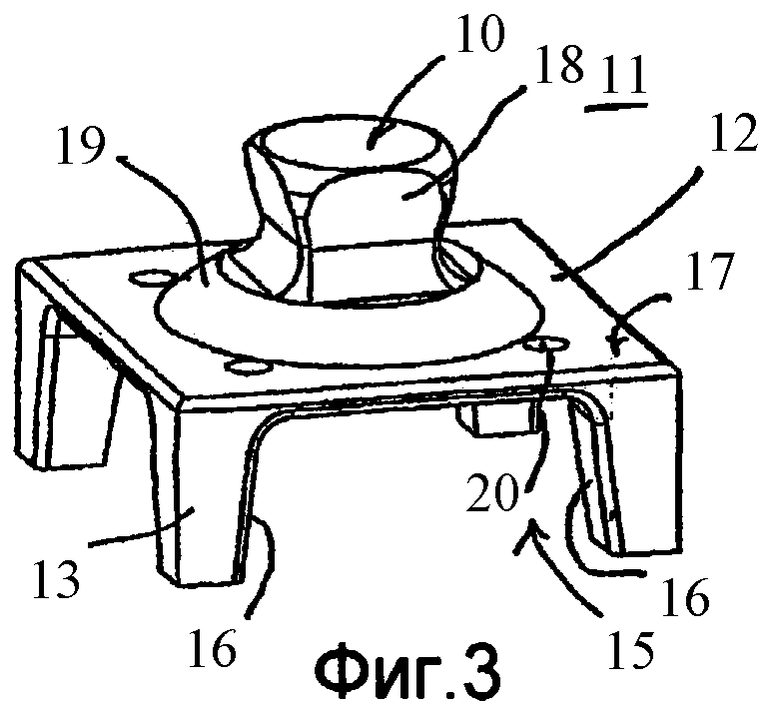
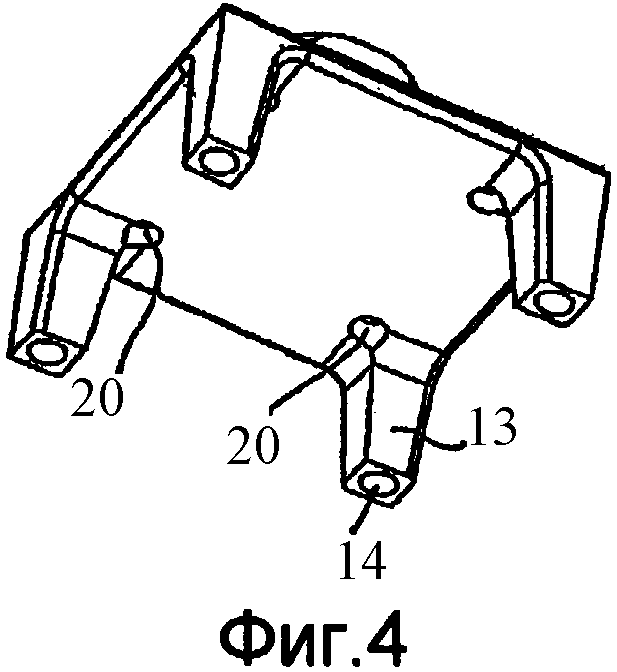
Такой регулировочный адаптер 10 выполнен на второй части 11 сенсорного устройства. Вторая часть 11 имеет второй, также квадратный фланец 12, размеры которого соответствуют размерам первого фланца 3. Оба фланца 3, 12 соединяются между собой посредством отформованных за одно целое со второй частью 11 ножек 13, проходящих на углах второго фланца 12 вниз, так что ножки радиально снаружи от вывода 2 прилегают к первому фланцу 3. Ножки 13 снабжены на своих нижних сторонах глухими резьбовыми отверстиями, которые могут совпадать со сквозными отверстиями 4 в первом фланце 3.
На фиг.3 и 4 видно, что ножки 13 имеют прямоугольное сечение и сужаются к своим свободным концам, т.е. вниз, посредством скоса 16, обращенного в промежуток 15 между двумя ножками 13.
Регулировочный адаптер 10 находится на обратной от ножек 13 верхней стороне 17 второго фланца 12. Он известным сам по себе образом выполнен в форме перевернутой усеченной пирамиды и имеет, следовательно, четыре наклонные плоские регулировочные поверхности 18, которые в целях регулирования могут взаимодействовать с регулировочными винтами. Регулировочный адаптер 10 переходит в цоколь 19 увеличенного диаметра, который своей выпуклой поверхностью образует переход ко второму фланцу 12.
Регулировочный адаптер 10 образует второй вывод сенсорного устройства. Между этим вторым выводом 10 и расположенными на углах второго фланца 12 ножками 13 по его диагонали выполнены выемки 20 в виде сквозного отверстия, посредством которых можно влиять на описанное более подробно ниже образование натяженных или растягивающихся участков.
На фиг.5 и 6 составленное из обеих частей 1, 11 сенсорное устройство изображено в смонтированном состоянии, однако без крепежных винтов. Видно, что между посадочным гнездом 9 первого вывода 2 и образующим второй вывод регулировочным адаптером 10 требуется лишь небольшая конструктивная высота 2-3 см.
На фиг.7-10 изображены схематичные вертикальные разрезы сенсорного устройства, показанного на фиг.1-6, однако со схематичным изображением наклеенных на обе поверхности фланца 12 тензорезисторов 21 в качестве сенсорных элементов.
На фиг.7-10 показанные внизу виды сверху поясняют позиционирование тензорезисторов 21 таким образом, что они за счет линейных сжимающихся участком 22 или растягивающихся участков 23 изменяются по длине, так что возникает измененное сопротивление.
На фиг.6 показан случай силового воздействия в направлении z, т.е. в осевом направлении трубчатого каркасного протеза голени. Тензорезисторы 21 на верхней стороне 17 фланца 12 находятся при этом на сжимающихся участках 22, которые линейно проходят от сквозных отверстий 20 параллельно кромкам фланца 12 к соседней кромке. Ориентированные в соответствии с этим тензорезисторы 21 изменяют, тем самым, значение своего сопротивления в направлении сжатия.
На фиг.8 регулировочный адаптер 10 нагружается крутящим моментом вокруг оси, перпендикулярной плоскости чертежа (направление х). Крутящий момент приводит для тензорезисторов 21 на верхней стороне 17, к которой он направлен (стрелка Мх), к сжатию, тогда как на противоположной стороне он приводит к образованию растягивающихся участков 23.
На фиг.9 показано действующее на регулировочный адаптер 10 боковое усилие в плоскости чертежа (направление у), за счет которого образуются перпендикулярные усилию растягивающиеся участки 23 и сжимающиеся участки 22, тогда как остальные тензорезисторы 21 остаются на верхней стороне 17 фланца 12 без измерительного сигнала.
При показанном на фиг.10 крутящем моменте Mz, действующем в направлении z, на каждой выемке 20 возникают сжимающийся 23 и растягивающийся 22 участки, причем в направлении крутящего момента Mz сжимающийся участок 23 опережает на 90° растягивающийся участок 22.
На представленных примерах видно, что с помощью тензорезисторов 21 в качестве сенсорных элементов возможно обнаружение различных возникающих усилий и моментов.
Тензорезисторы 21 на нижней стороне фланца 12 формируют сигналы, соответствующие сигналам тензорезисторов 21 на верхней стороне 17 фланца 12, так что при подходящем суммировании они могут способствовать усилению измерительного сигнала.
Изобретение относится к медицинской технике, а именно к устройствам для измерения усилий и/или моментов. Сенсорное устройство содержит жесткий передаточный элемент для передачи усилий или моментов, первый вывод, выполненный с возможностью соединения с первой частью передаточного элемента, второй вывод, выполненный с возможностью соединения со второй частью передаточного элемента, механико-электрические сенсорные элементы, первый фланец, окружающий первый вывод. Первый фланец через перпендикулярные ему ножки соединен с ориентированным параллельно ему вторым фланцем, причем промежуток между ножками больше их ширины. На втором фланце расположен второй вывод, а сенсорные элементы для определения растяжений или сжатий расположены, по меньшей мере, на одной из обеих поверхностей второго фланца рядом с ножками. Сенсорное устройство устанавливают в искусственной конечности вместо демонтируемой детали искусственной конечности, в частности искусственной ноге, приводя его размеры в соответствие с размерами демонтируемой детали. Использование изобретения позволяет преобразовывать механические параметры в электрические, обеспечивая точные измерения статических и динамических нагрузок при малых габаритах датчика. 2 н. и 14 з.п. ф-лы, 10 ил.
1. Сенсорное устройство для измерения усилий и/или моментов, содержащее жесткий передаточный элемент для передачи усилий или моментов, первый вывод (2), выполненный с возможностью соединения с первой частью передаточного элемента, второй вывод (10), выполненный с возможностью соединения со второй частью передаточного элемента, и механико-электрические сенсорные элементы (21) для преобразования механических параметров в электрические параметры, отличающееся тем, что сенсорное устройство имеет окружающий первый вывод (2) первый фланец (3), который через перпендикулярные ему ножки (13) соединен с ориентированным параллельно ему вторым фланцем (12), причем промежуток (15) между ножками (13) больше их ширины, на втором фланце (12) расположен второй вывод (10), при этом сенсорные элементы рассчитаны на определение растяжений или сжатий и расположены, по меньшей мере, на одной из обеих поверхностей второго фланца (12) рядом с ножками (13).
2. Устройство по п.1, отличающееся тем, что для восприятия растяжений или сжатий сенсорные элементы (21) расположены на обеих поверхностях второго фланца (12).
3. Устройство по п.1 или 2, отличающееся тем, что оно выполнено из двух частей - первой части (1) с первым фланцем (3) и второй части (11) со вторым фланцем (12), причем обе части (1, 11) выполнены с возможностью жесткого соединения между собой.
4. Устройство по п.3, отличающееся тем, что ножки (13) снабжены резьбовыми отверстиями (14) для крепежных винтов.
5. Устройство по п.1 или 2, отличающееся тем, что первый вывод (2) выполнен шляпообразным цилиндрического сечения, к которому примыкает первый фланец (3).
6. Устройство по п.3, отличающееся тем, что первый вывод (2) выполнен шляпообразным цилиндрического сечения, к которому примыкает первый фланец (3).
7. Устройство по п.1 или 2, отличающееся тем, что второй вывод (10) через выпуклость переходит во второй фланец (12).
8. Устройство по п.1 или 2, отличающееся тем, что сенсорные элементы (21) представляют собой тензорезисторы.
9. Устройство по п.8, отличающееся тем, что тензорезисторы (21) позиционированы для восприятия линейных растяжений или сжатий.
10. Устройство по п.1, отличающееся тем, что второй фланец (12) имеет выемки (20) для позиционирования растягивающихся участков (23) и сжимающихся участков (22).
11. Устройство по п.1 или 2, отличающееся тем, что первый фланец (3) и второй фланец (12) имеют четырехугольную форму, при этом предусмотрены четыре ножки (13).
12. Устройство по п.11, отличающееся тем, что четыре выемки (20) расположены по диагонали между вторым выводом (10) и ножками (13).
13. Устройство по п.12, отличающееся тем, что тензорезисторы (21) позиционированы для восприятия линейных растяжений или сжатий, проходящих от выемок (20) параллельно кромкам второго фланца (12).
14. Устройство по п.1, отличающееся тем, что второй вывод (10) расположен по центру второго фланца (12).
15. Способ установки сенсорного устройства по любому из пп.1-14 в искусственной конечности, в частности искусственной ноге, вместо демонтируемой детали искусственной конечности, в котором размеры сенсорного устройства приводят в соответствие с размерами демонтируемой детали искусственной конечности и устанавливают сенсорное устройство вместо демонтируемой детали.
16. Способ по п.15, в котором демонтируемой деталью является вращательный адаптер искусственной ноги.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 5360016 A, 01.11.1994 | |||
| US 4823618 A, 25.04.1989 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| 0 |
|
SU161872A1 | |

