Изобретение относится к железнодорожному транспорту и касается устройств для смены поглощающего аппарата с тяговым хомутом автосцепного оборудования подвижной единицы железнодорожного состава: вагонов, локомотивов и др.
Известно устройство для снятия поглощающего аппарата с тяговым хомутом автосцепного устройства по авторскому свидетельству СССР №1074746 (Бюл. №48 от 30.12.89), содержащее смонтированные на тележке подъемник с горизонтально расположенной плитой и рабочий орган с приводом, шарнирно закрепленный на конце плиты и выполненный в виде двух вертикально расположенных двуплечих рычагов, нижние концы которых кинематически связаны с приводом для их относительного перемещения, верхний конец одного из которых выполнен в виде вилки для охвата фрикционных клиньев поглощающего аппарата, а верхний конец другого - в виде клина тягового хомута для размещения в отверстии последнего, причем указанные рычаги шарнирно связаны один с другим в средней части и подпружинены один относительно другого. Особенность действия данного устройства состоит в том, что производится сжатие только пружин поглощающего аппарата, минуя его фрикционную часть, т.е. исключая силы трения фрикционных клиньев с корпусом аппарата и тем самым уменьшая потребное усилие для сжатия поглощающего аппарата при его выеме из ниши хребтовой балки вагона.
Недостаток данного устройства состоит в том, что в нем не содержатся средства для фиксации положения рычагов, необходимые, например, в самый ответственный момент действия расклинивающего усилия, чем снижается уровень безопасности труда. Кроме того, наличие в нем множества кинематических пар вращения и скольжения при необходимом усилии сжатия пружин поглощающего аппарата порядка 15…18 тс приводит к ускоренному износу механизма сжатия и снижению надежности всего устройства. Имеют место трудности в перенастройке или переналадке устройства при смене различных типов поглощающих аппаратов.
Известно устройство для снятия поглощающего аппарата с железнодорожного транспортного средства по авторскому свидетельству СССР №1532381 (Бюл. №48 от 30.12.89). Оно содержит смонтированный на тележке подъемник с силовой плитой и механизмом сжатия поглощающего аппарата, включающим в себя гидроусилитель, взаимодействующий с рамой вагона, горизонтально закрепленный на силовой плите силовой цилиндр, плунжер которого на свободном конце снабжен упором в виде клина тягового хомута, размещенного в отверстии (серьге) последнего, и вилку для охвата фрикционных клиньев упомянутого аппарата, жестко связанную с силовой плитой. В этом устройстве, так же как и в вышеприведенном аналоге, реализован принцип: сжатие поглощающего аппарата в нише хребтовой балки путем преодоления усилия предварительной затяжки его пружин, минуя сопротивление фрикционных клиньев. Давление масла от усилия подъемника и веса вагона передается в силовой цилиндр, плунжер которого создает усилие через упор на тяговый хомут и сжимает пружины снимаемого аппарата, опирающиеся через фрикционные клинья на вилку.
Недостатки этого аналога
- Неполнота и ненадежность захвата клиновидных сегментов, т.к. основной элемент захвата - вилка - в процессе сжатия контактирует с ними узкими полосками ее вертикальных «рожков». При этом площадь соприкосновения с торцами клиновидных сегментов и, следовательно, усилия на их расклинивание минимальны; такие же последствия возможны в случаях соскальзывания вилки с торцов сегментов (они имеют округлую форму) при ее поперечном смещении даже в пределах зазора или при малых смещениях тягового хомута в сборе с поглощающим аппаратом.
- В случае смены поглощающего аппарата другого типа требуется замена вилки, что приводит к переналадке всего механизма сжатия.
- Фиксация вилки при расклинивании сегментов, судя по описанию, в данном устройстве не осуществлена. Учитывая, что работы по смене поглощающего аппарата производят под вагоном в стесненном рабочем пространстве, при наличии высоких давлений, больших усилий и перемещаемых масс, надежное с надлежащим уровнем безопасности фиксирование положения вилки должно быть обеспечено.
Близким по совокупности существенных признаков к предлагаемому является устройство по патенту №2081767 на изобретение «Устройство для снятия поглощающего аппарата с железнодорожного транспортного средства» (Бюл. №17 от 20.06.97). Оно содержит смонтированный на тележке подъемник, несущий механизм сжатия поглощающего аппарата, включающий в себя корпус, связанный с подъемником, упор для зацепления серьги упомянутого аппарата, связанный с силовым цилиндром и гидроусилителем, захват клиновидных сегментов упомянутого аппарата и ложементы под него, установленные на корпусе, упомянутый захват выполнен в виде двух Г-образных рычагов, установленных поворотно относительно корпуса и соединенных между собой посредством прикрепленной к ним пружины, и снабжен механизмом фиксации положения рычагов, свободные концы вертикальных плеч которых выполнены с профилированными вырезами, обращенными навстречу друг другу для охватывания клиновидных сегментов, и устройство снабжено скобой, установленной на корпусе в месте изгиба рычагов и выполненной с двумя прорезями, размеры которых не менее хода упомянутой пружины, при этом упомянутые рычаги размещены в упомянутых прорезях с возможностью перемещения. Механизм фиксации положения рычагов включает в себя платформу, прикрепленную к корпусу посредством пружин сжатия и пальцев, жестко прикрепленных к корпусу и с возможностью перемещения к платформе или жестко прикрепленных к платформе и с возможностью перемещения к корпусу, фрикционную накладку, прикрепленную к платформе, и хомут, охватывающий выполненные клиновидными горизонтальные плечи рычагов и установленные с возможностью перемещения вдоль упомянутых плеч рычагов и взаимодействия с фрикционной накладкой.
Недостатки данного устройства состоят в следующем.
- Судя по описанию, функционирование механизма сжатия обеспечивается двумя независимыми приводами: приводом подъемника и приводом для смещения хомута через его тягу (последний, по-видимому, реализуется ручными манипуляциями оператора), что обуславливает аппаратурную избыточность или необходимость участия человека в выполнении технологических переходов цикла снятия от охвата рычагами нажимного конуса и соприкосновения последних с торцами подпружиненных клиновидных сегментов до фиксации рычагов при их расклинивании. При этом конструкция рычагов неоправданно сложна: компоновка в двух плоскостях имеет вертикальные и горизонтальные плечи, завязана на помещение последних в узкие щели выравнивающей скобы (здесь сложности при сборке, жесткие требования к их размерам, неизбежны силы трения и т.д.); кроме того, каждый рычаг шарнирно закреплен в одной точке, и это соединение должно иметь две степени свободы, т.е. в реальной конструкции с учетом значительных сил взаимодействия рычагов с поглощающим аппаратом оно выливается в силовой узел. Все это снижает надежность устройства.
- Конфигурация вертикальной части рычагов с профилированными вырезами не обеспечивает достаточной площади соприкосновения с сегментами, более того, она ограничивает работоспособность механизма сжатия. На первый взгляд представляется, что вырезы дают возможность увеличить площадь соприкосновения, и чем больше глубина выреза, тем площадь больше. Но для этого надо иметь большую ширину рычагов, а она лимитируется зазором между нажимным конусом поглощающего аппарата и боковой стенкой ниши в хребтовой балке, тем более, что при движении захвата вверх до охвата вырезами нажимного конуса рычаги должны еще и раздвигаться. Это обстоятельство особенно критично при съеме аппаратов, например, типа Ш-2В с уширенными полосами хомутов или Ш6-ТО4. В этих случаях устройство становится неработоспособным.
- Из описания явствует, что процессы сжатия пружин и фиксации положения рычагов в данном устройстве разобщены, причем если первый процесс от захвата сегментов до сжатия пружин автоматизирован, то второй нет. Кроме того, функционирование механизма фиксации здесь основано преимущественно на трении скольжения: например, клинообразное фиксирование и расфиксирование рычагов посредством движения хомута по горизонтальным частям рычагов от воздействия на тягу. Эксплуатация таких кинематических пар сопровождается закусываниями, заеданиями, ускоренным износом, необходимостью очистки и смазки и т.п., что снижает надежность работы всего устройства.
Целью изобретения является повышение надежности работы устройства и безопасности труда путем введения самоуправляемого захвата клиновидных сегментов с автоматической фиксацией положения рычагов.
Указанная цель достигается тем, что устройство для смены поглощающего аппарата, имеющего тяговый хомут, клиновидные сегменты и упорную плиту, размещенного в нише хребтовой балки подвижной единицы железнодорожного состава, содержащее силовую платформу, к которой с одной стороны посредством подъемника закреплена тележка, а с другой - шарнирно закреплены ступицы двух одноплечих рычагов со встречно направленными захватными выемками, силовой цилиндр с гидроусилителем и плунжером, расположенным параллельно силовой платформе и несущим на свободном конце упор, имеющий возможность взаимодействовать с упомянутым хомутом, и механизм фиксации, согласно данному изобретению дополнено тем, что по обе стороны от плунжера на уровне начала его хода в поперечной ему плоскости расположены упомянутые рычаги, выполненные в виде пластин с плоскими боковыми гранями, причем на поверхностях одной грани упомянутые захватные выемки выполнены вдоль внутренних ребер, а на другой в основании рычагов оборудован механизм фиксации в виде симметрично скошенных к внешним граням заплечиков - плоских ступенек с возможностью совместного взаимодействия с упорной плитой упомянутого аппарата, внешняя грань каждого рычага снабжена кулачком двуклиновой конфигурации с возможностью взаимодействия с боковой стенкой ниши хребтовой балки, при этом расстояние между концами рычагов в начальном их положении и вершинами кулачков в конечном положении выбрано соизмеримым ее поперечному размеру.
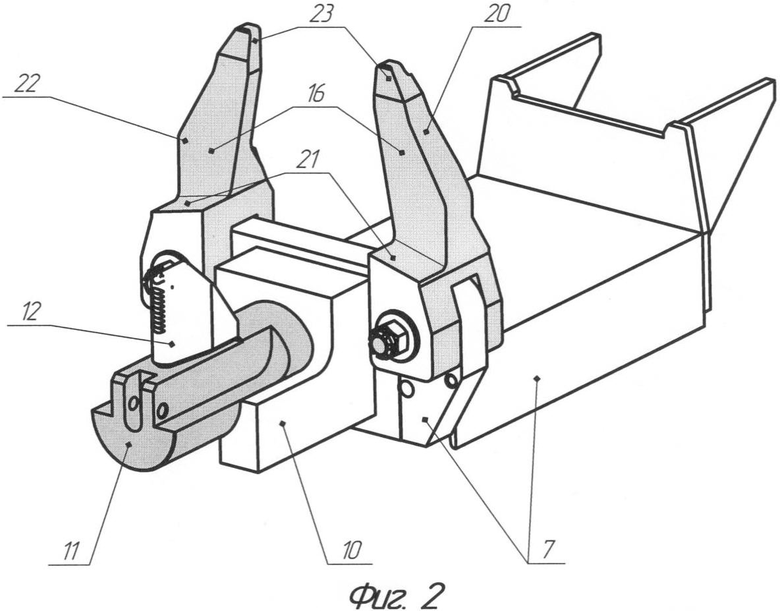
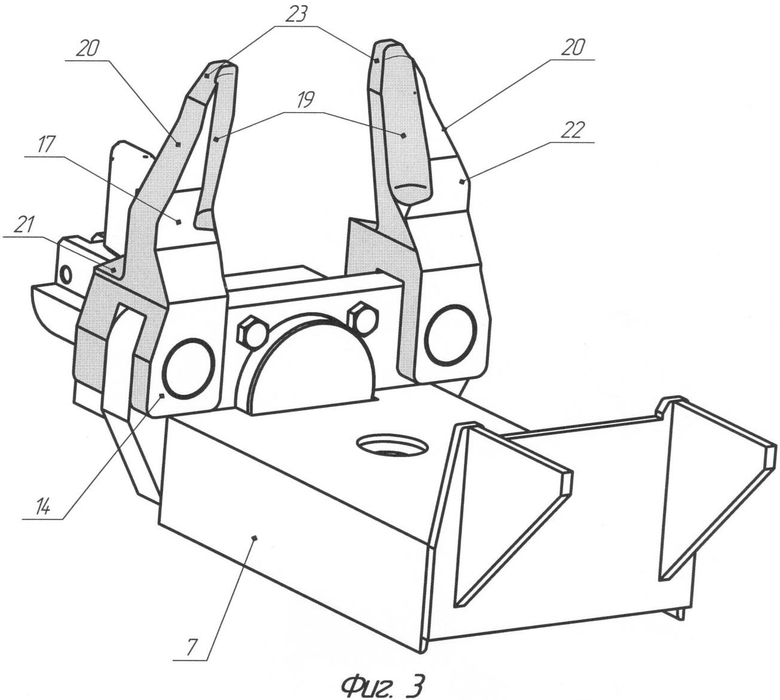
На фиг.1 изображено устройство смены поглощающего аппарата - фронтальный вид, на фиг.2 и 3 - конструкция механизма сжатия - в аксонометрии: виды спереди и сзади (возвратные пружины, трубопроводы, штуцеры, подъемник, тележка и др. не показаны), на фиг.4, 5, 6 показаны соответственно начальное, промежуточное и конечное положения рычагов в процессе захвата.
Устройство для смены поглощающего аппарата 1, имеющего тяговый хомут 2 и упорную плиту 3, размещенного в нише 4 хребтовой балки 5 в посадочном гнезде между предохранительными фрикционными планками 6, содержит силовую платформу 7 с двумя опорами под тяговый хомут, к которой с одной стороны, снизу, посредством подъемника 8 закреплена тележка 9 (на фиг.1 показаны условно). С другой стороны платформы 7, сверху, в начальной части закреплен силовой цилиндр 10 с плунжером 11, расположенным параллельно платформе 7 и несущим на свободном конце упор 12 в виде клина тягового хомута со скосом, имеющий возможность взаимодействия с тяговым хомутом 2 через серьгу 13. Здесь же на платформе 7 по обе стороны от плунжера 11 на уровне начала его хода в поперечной ему плоскости закреплены ступицы 14 двух одноплечих рычагов 15 в виде пластин с плоскими боковыми гранями 16 и 17. Первые грани 16 обращены к упорной плите 3, а другие, тыльные, грани 17 - к клиновидным сегментам 18 поглощающего аппарата 1. При этом на поверхностях тыльной грани 17 вдоль внутренних ребер рычагов 15 выполнены обращенные друг к другу и к сегментам 18 аппарата 1 захватные выемки 19, и на поверхностях первой грани 16 в основании рычагов 15 у ступиц 14 оборудован механизм фиксации в виде симметрично скошенных к внешним граням 20 заплечиков 21 - плоских ступенек с возможностью совместного взаимодействия их с упорной плитой 3. Внешняя грань 20 каждого рычага 15 снабжена кулачком 22 двуклиновой конфигурации с возможностью взаимодействия с предохранительными планками 6. Двуклиновая конфигурация кулачков несимметрична: верхняя его грань протяженнее нижней.
Кроме того, рычаги 15 выполнены суживающимися к своим концам 23. Последние по всем граням снабжены фасками, которые обеспечивают плавное взаимодействие рычагов 15 с ребрами 24 хребтовой балки 5 и нижними кромками планок 6 и надежное улавливание зазора между упорной плитой 3 и клиновидными сегментами 18 аппарата 1.
Силовой цилиндр 10 выполнен из заготовки квадратного сечения, чем обеспечивается его точное базирование на платформе 7 и технологичность сборки всего механизма сжатия. Упор 12 имеет на передней поверхности поперечную насечку для надежного сцепления с серьгой 13 хомута 2.
Устройство работает следующим образом. Автоматическое действие шарнирных рычагов 15 и механизма фиксации основано на захвате клинообразных сегментов 18 аппарата 1 при подъеме силовой платформы 7 и взаимодействие с предохранительными планками 6 вертикальных стенок ниши 4 клиновых граней 20 рычагов 15, а также с упорной плитой 3 в момент поджатая механизма сжатия к нижней полосе тягового хомута 2.
С помощью тележки 9 и подъемника 8 рычаги 15 заводят снизу под вагоном в просвет между упорной плитой 3 и клинообразными сегментами поглощающего аппарата 1. Фаски на гранях концов 23 рычагов 15 облегчают улавливание данного просвета. Подъемом платформы 7 рычаги 15 фасками на внешних гранях 20 достигают начального своего положения - ребер 23 хребтовой балки 5 (кромок ниши 4 в посадочном гнезде) (фиг.4). Далее происходит окончательный подъем платформы 7 с контролем того, чтобы упор 12 плунжера 11 вошел в отверстие серьги тягового хомута 2: кулачки 22 взаимодействуют с предохранительными планками 6 (фиг.5), заставляя рычаги 15 осуществить встречные повороты вокруг осей в ступицах 14; фасками, а затем и внутренними гранями войти в касание с поверхностью нажимного конуса 25 и охватить ее. Тем самым произведен захват, т.е. максимально возможное по площади соприкосновение к торцам клиновидных сегментов 18 тыльных граней 17 рычагов 15. При этом другие, противоположные, грани 16 совмещаются с упорной плитой (фиг.1), и нижние клиновые грани кулачков 22 по всей их длине входят в плотный контакт с предохранительными планками 6, фиксируя конечное положение рычагов 15 (фиг.6). Данная фиксация рычагов 15 обусловлена завершающим движением вверх подъемника 8. Дублирующая, силовая фиксация возникает одновременно с последней, когда упорная плита 3 своей нижней гранью входит во взаимодействие с заплечиками 20 и, подпираясь их углами 26, своей массой развивает крутящие моменты относительно осей рычагов 15 в ступицах 14, действующие на них встречно-поворотно, и прижимает рычаги 15 к поверхности нажимного конуса 25, тем самым надежно фиксируя их в этом положении (фиг.6).
Поворотом ручки запорного крана 27 в положение «Открыто» подают жидкость под давлением из гидроусилителя в полость силового цилиндра 10. Плунжер 11, воспринимая это давление, развивает усилие, и упор 12 плунжера 11, перемещаясь справа - налево, тянет хомут 2. Последний своей правой частью воздействует на корпус поглощающего аппарата 1, перемещает его и тем самым сжимает пружины последнего, которые с другой стороны опираются на рычаги 15 и сегменты 18 аппарата 1. Как только корпус поглощающего аппарата 1 отходит от упорных угольников хребтовой балки 2, он освобождается от усилия распора между ними. Установкой ручки запорного крана 27 в положение «Закрыто» перекрывают трубопровод, соединяющий бесштоковую полость цилиндра 10 с гидроусилителем, и тем самым фиксируют положение сжатого поглощающего аппарата 1. Откручивают гайки с болтов, крепящих поддерживающую его планку. Подъемником 8 опускают платформу 7 со сжатым поглощающим аппаратом 1, тяговым хомутом 2, упорной плитой 3 и поддерживающей планкой.
Поворотом ручки запорного крана 27 в положение «Открыто» снимают усилие сжатия пружин поглощающего аппарата 1. При этом под воздействием последних и возвратных пружин плунжер 11 цилиндра 10 возвращается в исходное положение, вытесняя под давление масло в полость гидроусилителя. На этом демонтаж поглощающего аппарата с тяговым хомутом заканчивается. Тележку 9 вывозят из-под вагона, поглощающий аппарат 1 с хомутом 2 и опорной плитой 3 снимают в ремонт.
Для монтажа на место снятого ставят отремонтированный комплект поглощающего аппарата и с помощью тележки 9 подвозят под вагон к месту демонтированного аппарата. Запорный кран 27 перекрывают. Подъемником 8 комплект аппарата поднимают и устанавливают в нишу 4 хребтовой балки 5 (посадочное гнездо вагона) вместе с поддерживающей планкой, которую закрепляют болтами и гайками. Платформу 7 подъемником 8 опускают в исходное положение.
В устройстве прототипа «после поджатая фрикционной накладки дальнейшее движение штока подъемника вводит в действие гидроусилитель с силовым цилиндром, что вызывает движение упора и приложение усилия на расклинивание подпружиненных сегментов аппарата…», т.е. подача жидкости в полость силового цилиндра производится не включением запорного крана, а как бы автоматически, что опасно для рабочего персонала и возможного сбоя дальнейшего функционирования устройства, т.к. при переходе от операции фиксации к сжатию поглощающего аппарата необходим контроль полноты зацепления упора с серьгой, соприкосновения рычагов с торцами сегментов, правильного положения тягового хомута на опорах платформы и центровки поглощающего аппарата и т.д. В данном устройстве применен независимый гидроусилитель, включение и выключение которого производит оператор при эксплуатации в необходимые моменты: после завершения фиксации рычагов в конечном их положении оператор открывает запорный кран, при завершении сжатия поглощающего аппарата закрывает его и далее после опускания снятого аппарата для роспуска его открывает запорный кран. Такая последовательность функционирования устройства и действия оператора обеспечивают надежную и безопасную смену поглощающих аппаратов, что и реализовано в предлагаемом устройстве.
Кроме того, имеют место следующие преимущества.
- Захват клиновидных сегментов и фиксация положения рычагов обеспечиваются в одном цикле одним приводом вместо двух в устройстве прототипа.
- Конфигурация рычагов захвата выбрана такой, которая позволяет выполнить самоуправляемые захват и фиксацию клиновидных сегментов слитно одно за другим за счет взаимодействия рычагов с элементами конструкции вагона (предохранительные планки на боковых стенках ниши хребтовой балки) и снимаемого поглощающего аппарата (нижняя грань упорной плиты). В устройстве прототипа эту роль выполняют специально введенные узлы (хомут в косых кромках горизонтальных плеч рычагов и платформа с фрикционной накладкой, пружин сжатия и пальцев).
- Конструкция механизма фиксации является предельно простой.
Все это позволяет повысить надежность предлагаемого устройства и уровень безопасности труда обслуживающего персонала.



Изобретение относится к железнодорожному транспорту, в частности для ремонта и технического обслуживания подвижного состава. Устройство для смены поглощающего аппарата содержит смонтированный на тележке подъемник, несущий механизм сжатия упомянутого аппарата, включающий в себя силовую платформу и закрепленный на ней цилиндр с плунжером, снабженным упором для зацепления серьги тягового хомута. Одноплечие рычаги захвата клиновидных сегментов установлены встречно-поворотно относительно цилиндра в поперечной ему плоскости, с конфигурацией, обеспечивающей самоуправляемые захват клиновидных сегментов и фиксацию соответствующего положения рычагов за счет взаимодействия последних с боковыми стенками ниши хребтовой балки и нижней гранью упорной плиты поглощающего аппарата. Достигается повышение надежности устройства и уровня безопасности труда. 5 ил.
Устройство для смены поглощающего аппарата, имеющего тяговый хомут, клиновидные сегменты и упорную плиту, размещенного в нише хребтовой балки подвижной единицы железнодорожного состава, содержащее силовую платформу, к которой с одной стороны посредством подъемника закреплена тележка, а с другой шарнирно закреплены ступицы двух одноплечих рычагов со встречно направленными захватными выемками, силовой цилиндр с гидроусилителем и плунжером, расположенным параллельно силовой платформе и несущим на свободном конце упор, имеющий возможность взаимодействовать с упомянутым хомутом, и механизм фиксации, отличающееся тем, что по обе стороны от плунжера на уровне начала его хода в поперечной ему плоскости расположены упомянутые рычаги, выполненные в виде пластин с плоскими боковыми гранями, причем на поверхностях одной грани упомянутые захватные выемки выполнены вдоль внутренних ребер, а на другой в основании рычагов оборудован механизм фиксации в виде симметрично скошенных к внешним граням заплечиков в виде плоских ступенек с возможностью совместного взаимодействия с упорной плитой упомянутого аппарата, внешняя грань каждого рычага снабжена кулачком с возможностью взаимодействия с боковой стенкой ниши хребтовой балки, при этом расстояние между концами рычагов в начальном их положении и вершинами кулачков в конечном положении рычагов выбрано соизмеримым с ее поперечным размером, причем последние рычаги выполнены с уменьшением площади поперечного сечения к своим концам, грани которых снабжены улавливающими фасками.
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ПОГЛОЩАЮЩЕГО АППАРАТА С ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2081767C1 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ПОГЛОЩАЮЩЕГО АППАРАТА С ТЯГОВЫМ ХОМУТОМ СЦЕПНОГО УСТРОЙСТВА | 1998 |
|
RU2137631C1 |
| Устройство для снятия поглощающего аппарата с железнодорожного транспортного средства | 1988 |
|
SU1532381A1 |

