Изобретение относится к области транспортного машиностроения и может быть использовано в качестве привода движения исполнительного органа механизмов и машин и в качестве двигателя транспортного средства.
Известен движитель транспортного средства, содержащий корпус с криволинейно-выпуклой поверхностью днища, соприкасающегося с грунтом и, по крайней мере, два дебаланса, соосно установленных в передней части корпуса на валах, расположенных параллельно поперечной оси транспортного средства и соединенных с двигателем, причем дебалансы соединены один с другим через редуктор, обеспечивающий их синхронное вращение в противоположные стороны, а плоскость симметрии дебалансов расположена наклонно относительно продольной оси транспортного средства по его ходу (см. патент РФ №347232, кл. B62d 57/02 от 14. 04.1969 г.).
Недостатком данного движителя является малая величина амплитуды тягового усилия в направлении перемещения, ограничений вследствие наклона направления действия этого усилия к направлению перемещения и постоянного значения центробежной силы, действующей на каждый груз, из-за постоянной скорости вращения кривошипов грузов.
Известен также принятый за прототип движитель транспортного средства, содержащий корпус, установленные в нем ведомые валы с закрепленным на каждом из них маховиком, вращаемые во взаимно противоположных направлениях, и механизмы для вращения ведомых валов с изменяющейся в течение одного оборота угловой скоростью, каждый из которых включает кривошип, закрепленный на приводном валу и кинематически связанный с маховиком, при этом маховики развернуты друг относительно друга на 180°. Кроме того, движитель снабжен вторым корпусом, соединенным с первым корпусом с возможностью управляемого перемещения одного относительно другого в плоскости, перпендикулярной к осям валов, каждый ведомый вал связан с индивидуальным приводным валом посредством поступательной кинематической пары, образованной кривошипом и пазом в маховике, числа маховиков и приводных валов равны восьми, приводные валы установлены во втором корпусе и связаны между собой парами одинаковых зубчатых колес (см. патент РФ №2097600, кл. F03G 3/00 от 27.04.94 г.).
Использование данного движителя создает вибрацию по всем осям движителя, так как маховики размещаются на разных осях. Кроме того, движитель недостаточно надежен, так как при работе возникает высокое трение между кривошипами и маховиками. Движитель имеет низкие эксплуатационные качества и конструктивно сложен.
Техническим результатом предлагаемого изобретения является повышение эксплуатационной надежности и упрощение конструкции.
Указанный технический результат достигается за счет того, что движитель транспортного средства, содержащий корпус, установленные в нем валы, на которых подвижно установлены маховики и механизмы вращения маховиков вокруг валов, содержащих двигатель, выполнен из двух связанных между собой и симметрично расположенных одинаковых частей, в каждой из которых маховики содержат рамную конструкцию, а валы выполнены коленчатыми, причем маховики установлены на их центральной части, а механизм вращения маховиков вокруг валов состоит из подвижно установленных на боковых частях валов барабанов, выполненных в виде двух зубчатых колес, соединенных боковыми стержнями, проходящими сквозь рамную конструкцию маховиков с возможностью перемещения, а также колесной парой, связанной зубчатой передачей с соответствующим барабаном и соединенной с двигателем.
При исследовании технического уровня предлагаемого изобретения не было обнаружено технического решения, обладающего признаками предлагаемого движителя транспортного средства, на основании чего можно считать, что предлагаемое решение соответствует критерию «технический уровень».
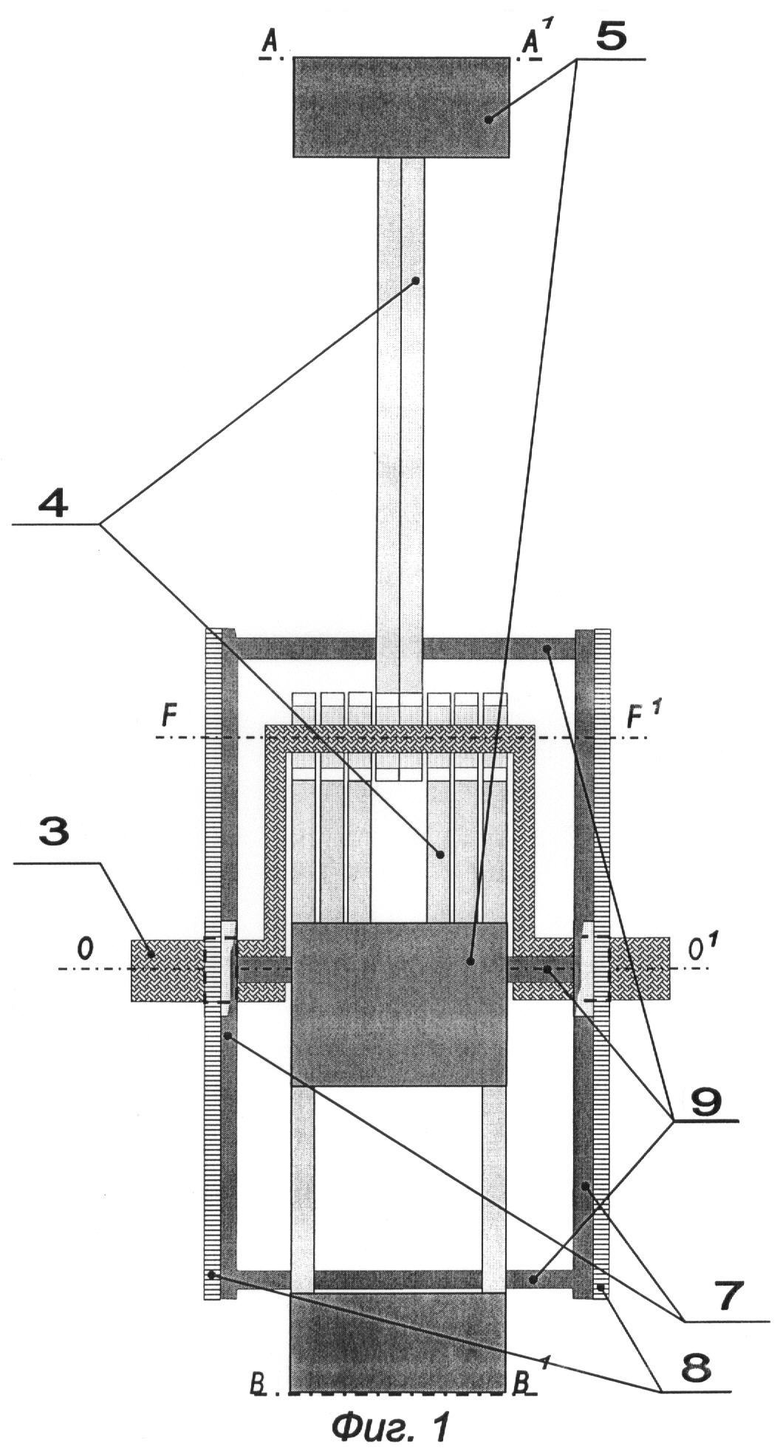
Сущность изобретения поясняется чертежами, где на фиг.1 изображен движитель транспортного средства (вид спереди), на фиг.2 изображен движитель транспортного средства (вид сбоку с органами управления, направленными в вертикальном направлении).
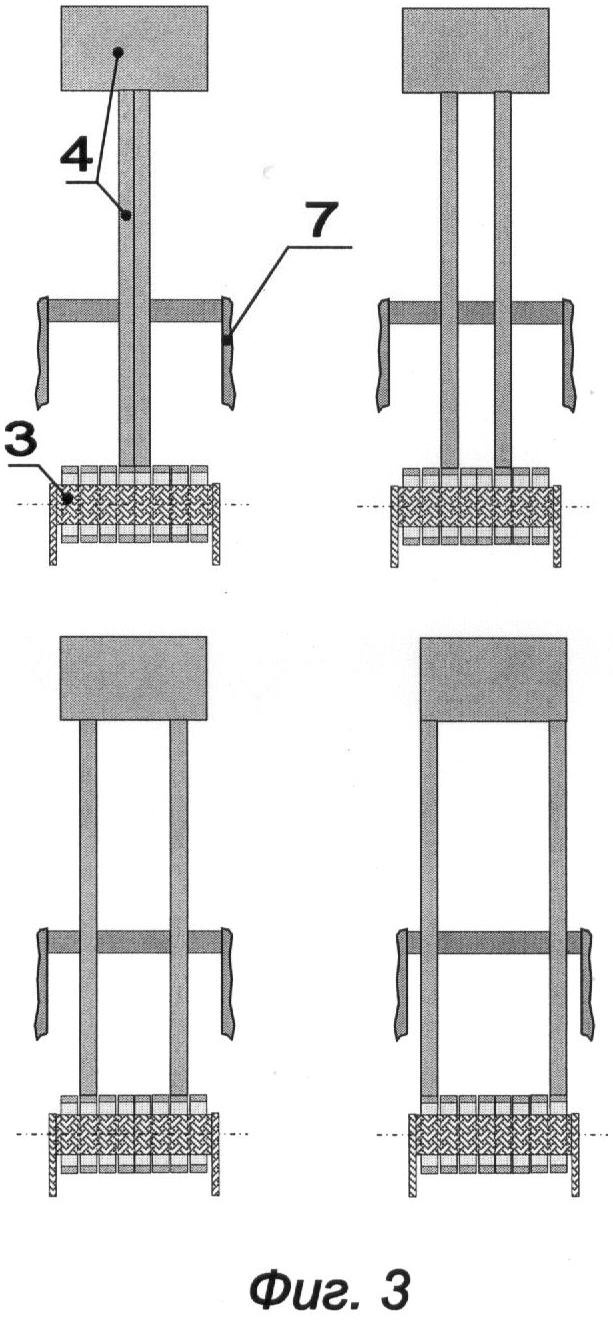
На фиг.3 изображен вид спереди 1-4 маховика в верхнем положении.
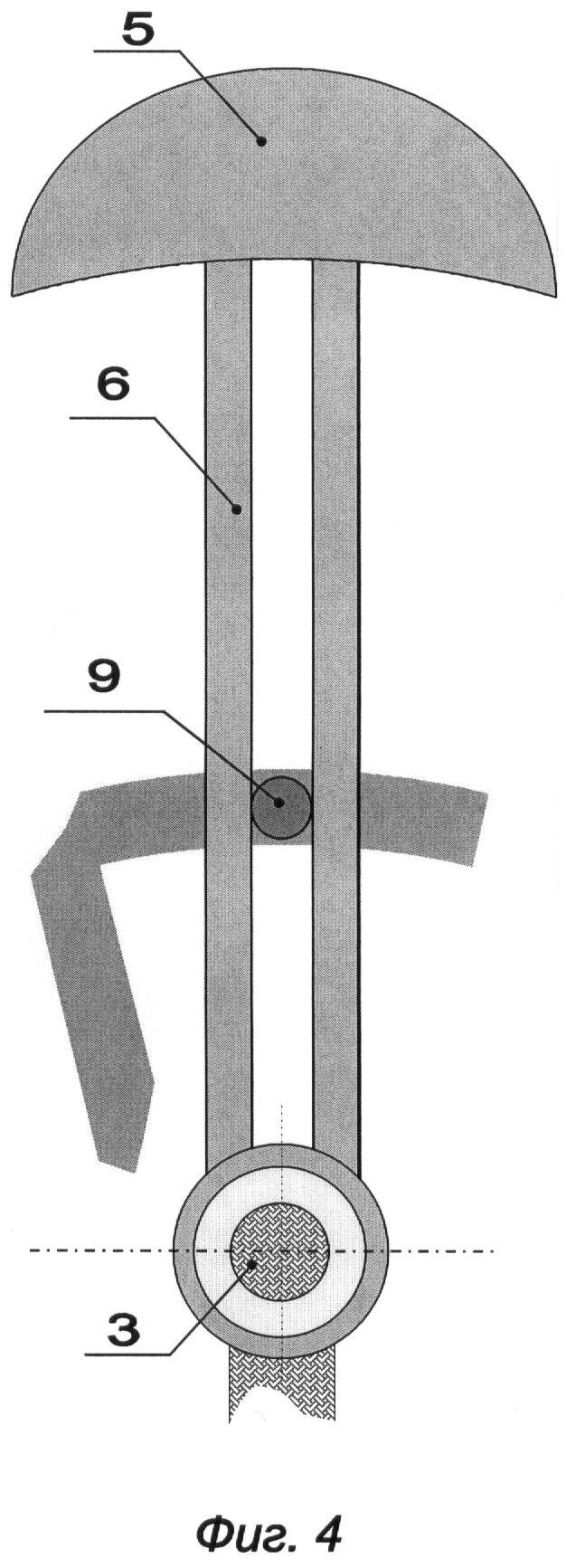
На фиг.4 изображен вид сбоку каждого из четырех маховиков.
На фиг.5 изображен коленчатый вал.
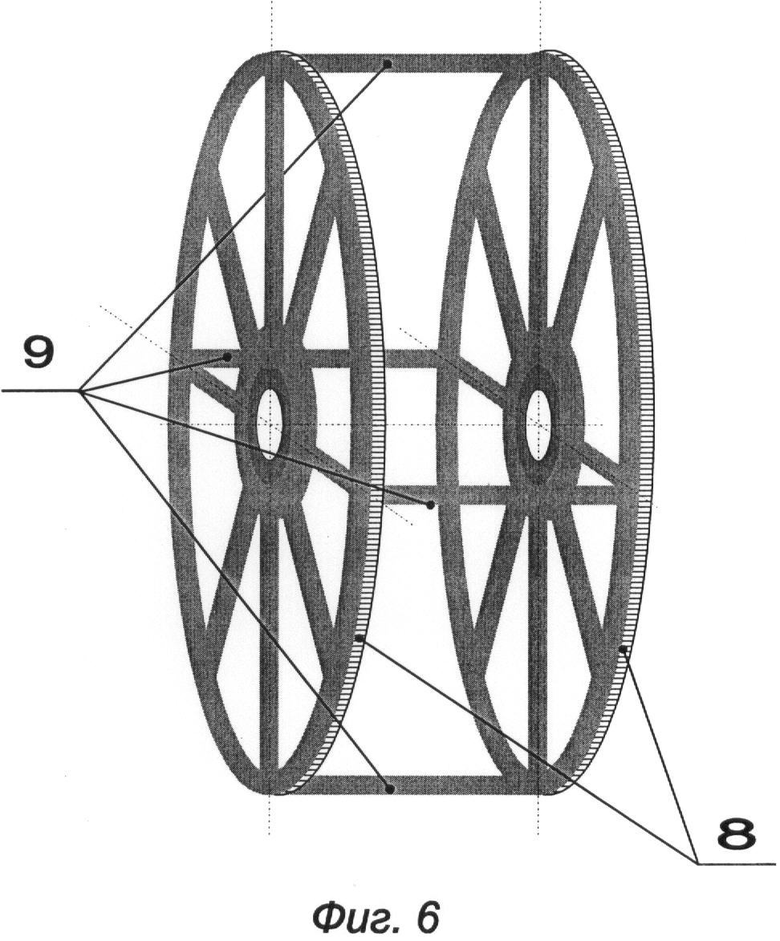
На фиг.6 изображена аксонометрия «барабана».
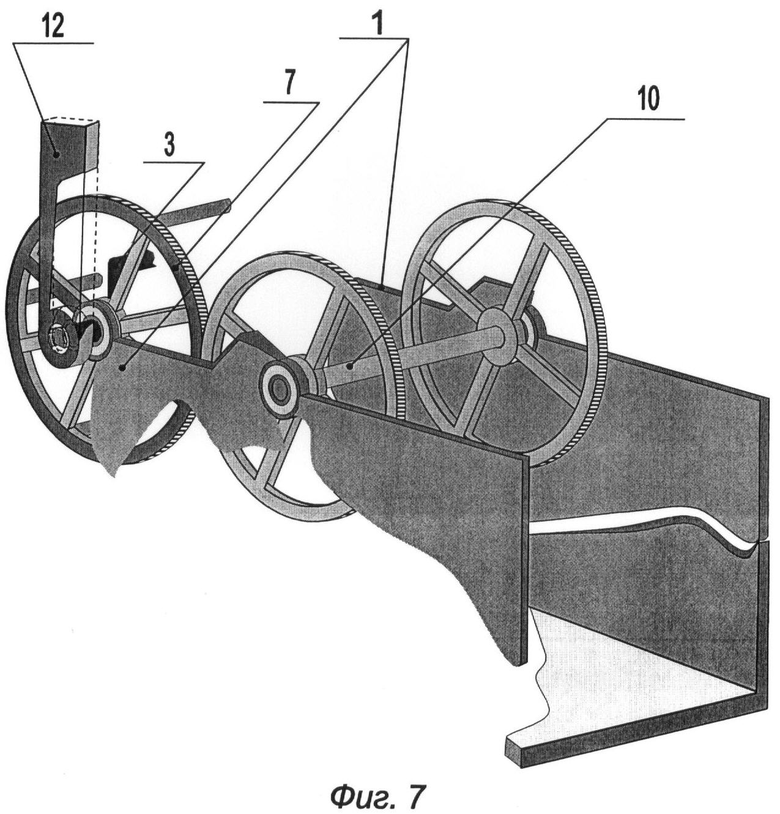
На фиг.7 изображена аксонометрия колесной пары, установленной на корпусе движителя.
Движитель транспортного средства содержит корпус 1, в котором симметрично расположены две одинаковые части 2. В каждой из частей 2 на корпусе 1 подвижно закреплены коленчатые валы 3. На центральной части коленчатых валов 3 подвижно установлены маховики 4. Маховики 4 выполнены в виде груза 5, имеющего в вертикальном сечении форму полумесяца, а в горизонтальном - прямоугольника, соединенного с рамной конструкцией 6. Механизм вращения маховиков вокруг валов 3 состоит из подвижно установленных на боковых частях валов барабанов 7, выполненных в виде двух зубчатых колес 8, соединенных боковыми стержнями 9, проходящими сквозь рамную конструкцию 6 маховиков 4 с возможностью перемещения, а также колесной парой 10, связанной зубчатой передачей с соответствующим барабаном 7 и соединенной с двигателем 11.
Подвижная связь всех элементов движителя может быть осуществлена, например, с помощью подшипников. Обе части 2 движителя управляются скобами 12, осуществляющими изменение наклона коленчатого вала относительно вертикали.
Движитель транспортного средства работает следующим образом. Вращение от двигателей 11 в каждой из частей 2 движителя передается через колесные пары 8 на барабаны 7 с одинаковым передаточным числом. В результате кинематической цепи описанной схемы барабаны 7 вращаются с одинаковой скоростью в противоположных направлениях. Вращение барабана 7 вокруг оси OO1 передается через перемещение боковых стержней 9 внутри рамной конструкции 6 маховиков 4, имеющих ось вращения FF1, за счет изменения точки приложения усилия с барабана 7 по всей ее длине за период одного оборота маховиков 4 вокруг коленчатого вала 3. При этом угловая скорость маховиков 4 последовательно монотонно изменяется от минимальной на уровне BB1 до максимальной на уровне AA1, а затем снова до минимальной.
Пример.
В качестве примера выполнения движителя транспортного средства рассматривается движитель транспортного средства, содержащий корпус 1, в котором симметрично расположены две одинаковые части 2. В каждой из частей 2 на корпусе 1 подвижно закреплены коленчатые валы 3. На центральной части коленчатых валов 3 подвижно установлены маховики 4. Количество маховиков 4 может быть как нечетным, так и четным, например равным четырем.
Маховики 4 выполнены в виде груза 5, имеющего в вертикальном сечении форму полумесяца, а в горизонтальном - прямоугольника, соединенного с рамной конструкцией 6, состоящей из двух идентичных элементов, жестко закрепляемых с одной стороны на грузе, а с другой - на валу с возможностью вращения. Варианты выполнения рамной конструкции 6 для каждого из четырех маховиков 4 представлены на фиг.3. Габариты груза 5 принимаются такими, чтобы при вращении вокруг коленчатого вала 3 он не касался груза 5 соседних маховиков 4.
На боковых частях коленчатого вала 3 подвижно, с возможность свободного вращения на роликовых подшипниках, установлен барабан 7, выполненный в виде двух зубчатых колес 8, соединенных боковыми стержнями 9, проходящими сквозь рамные конструкции 6 маховиков 4 с возможностью их перемещения внутри рамы. Для облегчения хода боковых стержней 9 вдоль рамной конструкции 6 маховиков 4 используются подшипники качения (шариковые или роликовые). Барабаны 7 зубчатой передачей 8 связаны с соответствующей колесной парой 10, соединенной с двигателями 11. Обе части 2 движителя управляются скобами 12, осуществляющими изменение наклона коленчатого вала относительно вертикали. Управление наклоном коленчатого вала 3 с помощью скоб 12 может производиться как одновременно, так и отдельно в каждой части 2 движителя.
Движитель транспортного средства работает следующим образом. Вращение от двигателей 11 в каждой из частей 2 движителя передается через колесные пары 8 на барабаны 7 с одинаковым передаточным числом. В результате кинематической цепи описанной схемы барабаны 7 вращаются с одинаковой скоростью в противоположных направлениях. Вращение барабана 7 вокруг оси OO1 передается через перемещение боковых стержней 9 внутри рамной конструкции 6 маховиков 4, имеющих ось вращения FF1, за счет изменения точки приложения усилия с барабана 7 по всей длине рамной конструкции 6 за период одного оборота маховиков 4 вокруг коленчатого вала 3.
При этом угловая скорость маховиков 4 последовательно монотонно изменяется от минимальной на уровне BB1 до максимальной на уровне AA1, а затем снова до минимальной.
Эффект смещения центра тяжести всей механической системы получается в результате возникновения превышения инерционных сил при прохождении верхнего сектора конструкции, возникающих в результате разности скорости движения центра масс маховиков 4, в верхнем и нижнем положении.
Управление движителем осуществляется изменением скорости вращения маховиков 4 и изменением положения вала 3 скобами управления 12.
Достоинством предложенной конструкции является то, что центры масс всех маховых элементов 4 находятся в единой плоскости вращения, что обеспечивает отсутствие дополнительной вибрации и создает равномерное усилие центробежной силы на оба крыла вала и соответственно на корпус 1 движителя.
Предложенный движитель транспортного средства в отличие от известных позволит, за счет использования отличительных признаков, получить следующий эффект:
- упростить конструкцию движителя;
- повысить эксплуатационную надежность движителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ | 2017 |
|
RU2664853C1 |
| ВЕЗДЕХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕЩАЕМЫМ ЦЕНТРОМ ТЯЖЕСТИ | 2008 |
|
RU2381941C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Гидроинерционный трансформатор вращающего момента | 1991 |
|
SU1786301A1 |
| СТЕНД ДЛЯ СИЛОВЫХ ИСПЫТАНИЙ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2335753C1 |
| ПЛАВАТЕЛЬНОЕ ОБОРУДОВАНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2390458C1 |
| СПОСОБ ЗАВИСИМОЙ ОТ ОБОРОТОВ ПЕРЕДАЧИ КРУТЯЩЕГО МОМЕНТА И КОНСТРУКЦИЯ МАХОВИКА С ДВУМЯ МАССАМИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2496038C1 |
| Внутритрубный колёсный движитель динамического типа для подвижного состава высокоскоростной вакуумно-трубопроводной магистрали | 2019 |
|
RU2706850C1 |
| МАЯТНИКОВЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2691888C1 |
| КОЛЕСНОЕ ГРАВИТАЦИОННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1988 |
|
RU2016783C1 |

Изобретение относится к области транспортного машиностроения. Движитель транспортного средства содержит корпус, установленные в нем валы, на которых подвижно установлены маховики, и механизмы вращения маховиков вокруг валов. Движитель выполнен из двух связанных между собой и симметрично расположенных одинаковых частей, в каждой из которых маховики содержат рамную конструкцию, а валы выполнены коленчатыми. Маховики установлены на центральной части коленчатых валов. Механизм вращения маховиков вокруг коленчатых валов состоит из подвижно установленных на боковых частях валов барабанов и колесной пары. Барабаны выполнены в виде двух зубчатых колес, соединенных боковыми стержнями. Стержни проходят сквозь рамную конструкцию маховиков с возможностью перемещения. Колесная пара связана зубчатой передачей с соответствующим барабаном и соединена с двигателем. Достигается повышение надежности движителя и упрощение его конструкции. 7 ил.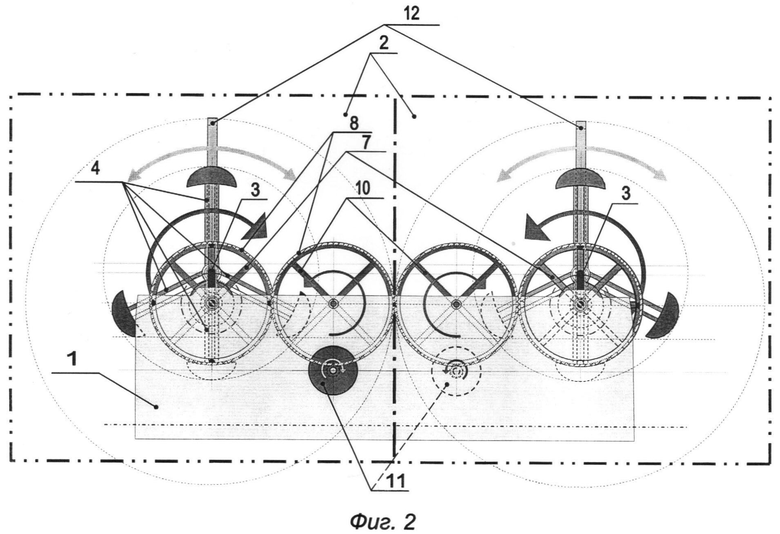
Движитель транспортного средства, содержащий корпус, установленные в нем валы, на которых подвижно установлены маховики, и механизмы вращения маховиков вокруг валов, содержащих двигатель, отличающийся тем, что движитель выполнен из двух связанных между собой и симметрично расположенных одинаковых частей, в каждой из которых маховики содержат рамную конструкцию, а валы выполнены коленчатыми, причем маховики установлены на их центральной части, а механизм вращения маховиков вокруг коленчатых валов состоит из подвижно установленных на боковых частях валов барабанов, выполненных в виде двух зубчатых колес, соединенных боковыми стержнями, проходящими сквозь рамную конструкцию маховиков с возможностью перемещения, а также колесной парой, связанной зубчатой передачей с соответствующим барабаном и соединенной с двигателем.
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ | 1994 |
|
RU2097600C1 |
| DE 19738680 A1, 11.03.1999 | |||
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1967 |
|
SU224653A1 |
| ВИБРОВОЗБУДИТЕЛЬ ИНЕРЦИОННОГО ДВИЖИТЕЛЯ | 1992 |
|
RU2026504C1 |
| RU 2066398 С1, 10.09.1996 | |||
| WO 9851942 A1, 19.11.1998. | |||

