Область техники
Изобретение относится к области радарных систем для определения местоположения цели, а точнее, к способам радиолокационного измерения угла места низколетящей цели в условиях интерференции сигналов над отражающей подстилающей поверхностью (морем).
Уровень техники
В настоящее время известно множество методов, позволяющих измерять высоту низколетящей цели (НЛЦ), таких как внеосевое моноимпульсное сопровождение, использование симметричных суммарно-разностных и асимметричных диаграмм направленности, метод комплексных углов, метод нелинейной логической фильтрации, метод максимального правдоподобия. Однако точное измерение высоты или угла места (УМ) низколетящей цели в условиях интерференции сигналов традиционными методами в силу разных причин проблематично, либо, как в случае методов суммарно-разностных диаграмм, из-за того, что в этих условиях пеленгационная характеристика разрушается, либо из-за трудно реализуемости и больших аппаратурных затрат, необходимых для применения метода максимального правдоподобия. Когда цель летит ниже определенного уровня, так что угловое разделение между отраженными от цели и переотраженными от водной поверхности сигналами меньше, чем 0,8 ширины луча антенны, обычные методы моноимпульса дают большие ошибки сопровождения.
Аналогом настоящего изобретения является метод, описанный (Lo Т., Litva J. Low-angle tracking using multifrequency sampled aperture radar. - IEEE Trans. on Aerospace and Electronic Systems, 1991, v.27, №5, p.797-805). Метод основан на использовании локатора системы SAMPAR и усовершенствованного алгоритма нахождения максимума функции правдоподобия, в котором используется высокоточная модель сигнала. Метод обеспечивает многократное увеличение разрешающей способности сигнала, которое превышает любой способ, опубликованный в открытой литературе. Как и другие типы радиолокационных систем, система SAMPAR состоит из передающей части и принимающей части. Первая используется, чтобы облучить заданное локатору пространство радиочастотной энергией, тогда как последняя используется, чтобы получить и обработать отраженные радиолокационные сигналы, чтобы извлечь необходимую информацию. Ключевой характеристикой алгоритма оценки высоты цели является использование информации о дальности цели. Для этого необходимо, чтобы радар работал в режиме определения дальности цели. Данный алгоритм основывается на концепции зеркального отражения. Метод может не работать, когда водная поверхность становится неровной. Когда метод не работает, тогда необходимо возвращаться к методу моноимпульса. В результате проведенных экспериментов, когда система работала на двух X-диапазонах частот одновременно: один из частотных каналов работал на фиксированной частоте 10,2 ГГц, другой быстро переключался в диапазоне от 8 до 12 ГГц с шагом 30 МГц, была показана возможность различать сигналы, которые разделяются на одну десятую ширины луча.
Система SAMPAR выбрана прототипом предлагаемого изобретения потому, что решение проблемы измерения малых углов места низколетящих над морем целей в предлагаемом изобретении основано, так же как и в системе SAMPAR, на быстрой перестройке несущей частоты сигнала.
Для решения этой проблемы система SAMPAR излучает и принимает сигнал в очень широкой полосе перестройки несущей частоты: 10 ГГц ±20%. Она работает с сигналом с однозначной дальностью, информация о которой является ключевой для алгоритма оценки высоты цели. Этот сигнал характерен тем, что имеет малую длительность и большую скважность и потому требует высокой импульсной мощности передатчика для обеспечения потенциала, необходимого для обнаружения и сопровождения малоразмерных НЛЦ. При скважности 50-100 она должна быть не менее 50-100 кВт. Такую мощность может иметь только передатчик на лампе бегущей волны, полоса частот которой менее ±3%. Следовательно, надо иметь не менее 6-ти передатчиков. Масса каждого с системой охлаждения составляет несколько сотен килограммов. Это очень громоздко, дорого и трудно реализуемо.
Сущность изобретения
Предлагаемый способ основан на сканировании цели интерференционными лепестками путем вобуляции несущей излучаемого сигнала от импульса к импульсу.
Ширина лепестка и угол его наклона относительно горизонта пропорциональны длине волны λ (Теоретические основы радиолокации. Под редакцией Дулевича В.Е. М., Советское радио, 1978 г.):
 ,
,
где ha - высота антенны.
Если изменять λ в излучаемом сигнале от импульса к импульсу, то интерференционные лепестки диаграммы направленности будут сканировать цель по УМ с частотой, равной половине частоты повторения Fr.
При увеличении λ лепесток расширяется и поднимается над радиогоризонтом, а при уменьшении - сужается и опускается. При этом по коэффициенту модуляции амплитуды отраженного сигнала можно определить угол места интерференционного лепестка, а по знаку фазы модуляции и отношению сигнал/шум уточнить положение цели в нем.
Коэффициент модуляции амплитуды пропорционален порядковому номеру лепестка: скажем, для 10-го лепестка он будет в 10 раз больше, чем для 1-го. Таким образом, величина коэффициента модуляции несет информацию об УМ: он пропорционален измеряемому УМ цели. Угол места максимума n-го интерференционного лепестка относительно направления на горизонт равен (Теоретические основы радиолокации. Под редакцией Дулевича В.Е. М., Советское радио, 1978 г.):
УМn=nδθ+nmfδθ-δθ/2
где n=1, 2, 3… - порядковый номер лепестка;
δθ=λ(2h) - ширина лепестка;
mf - коэффициент вобуляции несущей.
В результате сканирования сигнал, отраженный от цели, находящийся на «склоне» лепестка, будет промодулирован по амплитуде с коэффициентом модуляции
man=nma1
где ma1 - коэффициент модуляции сигнала в первом лепестке, соответствующий mf.
Отсюда

Измеряя коэффициент модуляции сигнала man, можно определить номер лепестка n.
Фаза модуляции амплитуды сигнала в результате сканирования будет меняться на противоположную в зависимости от того, на каком «склоне» лепестка находится цель: если фаза положительна, цель находится на верхнем «склоне» лепестка, она окажется отрицательной, когда цель находится на нижнем «склоне».
Распознавание положения цели в лепестке увеличивает точность интерферометрического способа измерения в 2 раза: максимальная ошибка оценки УМ в этом случае не превосходит δθ/4 и дает полное представление о направлении движения цели по УМ.
Данное изобретение направлено на получение высокой точности измерения УМ без применения для этой цели дополнительной аппаратуры и при очень простом алгоритме обработки принимаемого сигнала. Этот технический результат достигается тем, что при использовании в качестве критерия оценки УМ цели коэффициента модуляции амплитуды сигнала не возникает проблемы неоднозначности измерений при интерференции сигналов, напротив, интерференция используется как положительный фактор, способствующий повышению точности измерений.
Схема обработки сигнала, несущего информацию о знаке фазы модулированного сигнала и коэффициенте модуляции, приведена на чертеже.
Амплитуда модуляции сигнала равна
Um=maUc,
где ma - коэффициент модуляции амплитуды сигналов;
Uc - амплитуда импульса сигнала.
Выражая амплитуду Uc на выходе приемного устройства через отношение сигнал/шум (S/N) и учитывая, что это отношение в свободном пространстве, равное 18 дБ, в условиях интерференции сигналов для той же дальности будет на 12 дБ выше и составит 30 дБ, получаем
 ;
;  ,
,
где σш - эффективное напряжение шума.
Производная вблизи середины первого интерференционного лепестка показывает, что при mf=3% ma1=5%, для которого Um1/σш=1,6.
Вероятность того, что Um1 не меньше 1,6 σш, равна ρ1=0,89.
Для второго лепестка, в котором коэффициент модуляции в 2 раза выше, ma2≈10%, отношение Um2/σш=3,2 и вероятность ρ2 близка к 1.
Таким образом, предложенный способ распознавания «склона» лепестка работоспособен даже при небольшом mf.
Пример определения УМ цели по результатам измерений при δθ=λ/2ha=1 мрад для λ=3 см и ha=15 м приведен в таблице 1.
Предлагаемый способ обеспечивает на порядок более высокую точность определения УМ НЛЦ, чем точность измерения УМ в свободном пространстве при отношении сигнал/шум 18 дБ.
На чертеже представлена схема обработки сигнала, несущего информацию о знаке фазы модулированного сигнала и коэффициенте модуляции.
Сведения, подтверждающие возможность осуществления изобретения
Предлагаемое изобретение может быть внедрено в любой радиолокатор, имеющий электронную перестройку несущей частоты в полосе ±1,5%. Дополнительной аппаратуры для внедрения данного изобретения не требуется. Алгоритм обработки сигнала и определения УМ цели по результатам измерений предельно прост.
Технический результат - обеспечение высокой точности измерения угла места низколетящей цели в условиях интерференции сигналов без аппаратурных затрат и упрощение алгоритма обработки принимаемого сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР ДВИЖУЩЕЙСЯ ЦЕЛИ | 1984 |
|
SU1840999A1 |
| Способ высокоточного определения высоты полета низколетящей цели моноимпульсной РЛС сопровождения | 2021 |
|
RU2779039C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОМЕСТНОЙ КООРДИНАТЫ НИЗКОЛЕТЯЩЕЙ ЦЕЛИ | 2010 |
|
RU2444750C2 |
| Способ определения высоты полета низколетающей цели моноимпульсной РЛС сопровождения | 2021 |
|
RU2761955C1 |
| Способ точного сопровождения по углу места низколетящей цели в условиях интерференции | 2017 |
|
RU2682239C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И МОНОИМПУЛЬСНАЯ РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2802886C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| Способ определения высоты полёта низколетящей цели моноимпульсной РЛС сопровождения в реальном масштабе времени | 2023 |
|
RU2816168C1 |
| ПОМЕХОЗАЩИЩЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ ЦЕЛЕЙ | 1992 |
|
RU2040006C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ПОМЕХ МАЛОВЫСОТНОГО ДАЛЬНОМЕРА | 1992 |
|
RU2038605C1 |
Изобретение относится к способам радиолокационного измерения угла места низколетящей над морем цели в условиях интерференции отраженных сигналов. Техническим результатом изобретения является повышение точности измерений. Способ основан на сканировании цели интерференционными лепестками путем вобуляции несущей излучаемого сигнала от импульса к импульсу. При этом измеряют коэффициент модуляции амплитуды и знак фазы модуляции принимаемого сигнала, а также отношение сигнал/шум и определяют по коэффициенту модуляции угол места интерференционного лепестка, а по знаку фазы модуляции и отношению сигнал/шум - положение цели в нем. 1 ил.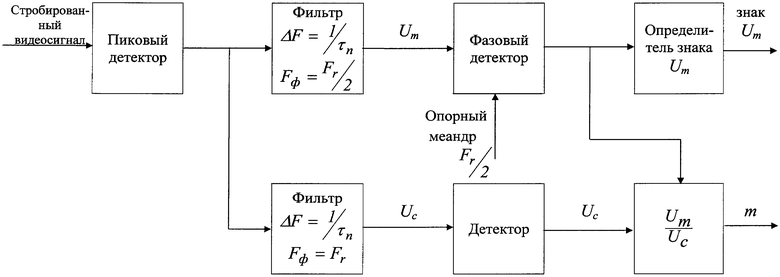
Способ высокоточного радиолокационного измерения угла места низколетящей цели, использующий интерференцию сигналов, отличающийся тем, что осуществляют сканирование цели интерференционными лепестками путем вобуляции несущей излучаемого сигнала от импульса к импульсу, измеряют коэффициент модуляции амплитуды и знак фазы модуляции принимаемого сигнала, а также отношение сигнал/шум, и определяют по коэффициенту модуляции угол места интерференционного лепестка, а по знаку фазы модуляции и отношению сигнал/шум - положение цели в нем, и получают точное значение угла места цели.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА МЕСТА И ДАЛЬНОСТИ НИЗКОЛЕТЯЩЕЙ ЦЕЛИ МОНОИМПУЛЬСНЫМ РАДИОЛОКАТОРОМ ПРИ МНОГОЛУЧЕВОМ РАСПРОСТРАНЕНИИ ОТРАЖЕННОГО ОТ ЦЕЛИ СИГНАЛА | 1994 |
|
RU2080619C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА МАЛОВЫСОТНЫХ ЦЕЛЕЙ | 1992 |
|
RU2038607C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| УГЛОМЕРНОЕ УСТРОЙСТВО МАЛОВЫСОТНОЙ РЛС | 1991 |
|
RU2013786C1 |
| US 6856280 B1, 15.02.2005. | |||

