Изобретения относятся к радиолокации и могут быть использованы в моноимпульсных радиолокационных станциях (РЛС) при сопровождении низколетящих целей (НЛЦ) на малых углах места в условиях наличия мешающих отражений от подстилающей поверхности.
Основной проблемой при слежении за НЛЦ в моноимпульсных РЛС, является многолучевое распространение радиоволн вблизи земной, а особенно, вблизи водной поверхности, которое влечет за собой существенное увеличение ошибок в определении угломестного положения цели. В результате данного явления отраженная от цели энергия попадает на антенну как прямым путем, так и после отражения от подстилающей поверхности. В этом случае отраженную волну можно рассматривать как излучение некоторого дополнительного фиктивного источника (антипода), являющегося зеркальным отражением цели, дальность до которого всегда будет несколько больше, чем до реальной цели. При движении цели на или от РЛС в результате интерференции прямого и отраженного лучей в измерениях угла места появляются характерные низкочастотные колебания значительной амплитуды, которые не отражают характера изменения данного параметра реальной траектории цели, как показано, например, на фиг. 1, где цифрой 1 обозначено истинное значение угла места НЛЦ, а цифрой 2 значение угла места НЛЦ, непосредственно измеренное моноимпульсной РЛС миллиметрового диапазона.
Используемый обычно при траекторном сопровождении целей фильтр Калмана в принципе не способен отличить реальный маневр НЛЦ по высоте от ошибок в ее измерениях, вызванных многолучевым распространением радиоволн, поскольку он изначально построен в предположении, что все ошибки измерений являются чисто случайными, т.е. в терминологии математической статистики являются нормально распределенным белым шумом с нулевым средним и известной дисперсией. В случае же НЛЦ искажение измерений угла места явно имеет вид так называемого цветного (автокоррелированного) шума (см. фиг. 1). Таким образом, в данной ситуации фильтр Калмана не способен выдать корректные оценки высоты: им отфильтровываются (сглаживаются) лишь высокочастотные помехи, низкочастотные же квазигармонические колебания, вызванные переотражениями, воспринимаются им как маневры цели.
Можно выделить три основные группы методов компенсации ошибок в измерениях угла места от многолучевого распространения радиоволн.
К первой группе относятся способы, связанные с усложнением конструкции РЛС [Леонов А.И. Моноимпульсная радиолокация / А.И. Леонов, К.И. Фомичев. - М.: «Радио и Связь», 1984; Sherman S.M., Barton В.K. Monopulse Principles and Techniques. - Artech House, 2011]: например, увеличение апертуры антенны, повышающее разрешающую способность по углу места; использование моноимпульсных систем с парными антеннами в угломестной плоскости; экранирование позиций РЛС; применение вертикальной поляризации; использование асимметричной (косекансной) диаграммы направленности антенны (ДНА) и т.п. Все такие способы, как правило, приводят к существенному увеличению габаритов, сложности, энергоемкости и стоимости РЛС. В качестве примера такого подхода можно рассмотреть патент РФ [RU №2444750 С2, МПК G01S 5/08. Способ определения угломестной координаты низколетящей цели, 2010 г.], в котором предложено использовать четыре идентичные антенны или субапертуры одной антенны с центрами, расположенными попарно симметрично в горизонтальной и вертикальной плоскостях (в форме ромба), формирующих специальным образом дискриминационные (пеленгационные) характеристики измерителя координат в угломестной и азимутальной плоскостях, не зависящие от характеристик подстилающей поверхности. Таким образом, в данном аналоге предлагаемого изобретения за счет существенного усложнения конструкции и удорожания антенны удается повысить точность измерения угла места и высоты НЛЦ.
Ко второй группе относятся способы, связанные с расширением полосы излучаемых сигналов. В качестве примеров такого подхода можно рассмотреть патенты РФ [RU №2392638 С1, МПК G01S 13/00. Способ высокоточного радиолокационного измерения угла места низколетящей цели в условиях интерференции сигналов, 2009 г. и RU №2761955 С1, МПК G01S 13/44. Способ определения высоты полета низколетающей цели моноимпульсной РЛС сопровождения, 2021 г.], в которых исходными данными для реализации методов повышения точности измерения угла места НЛЦ являются синфазные и квадратурные составляющие суммарного и разностного каналов приемника, полученные для нескольких различных значений несущей частоты зондирующих импульсов на нескольких последовательных тактах работы РЛС. Причем, для достижения требуемой точности эти значения несущей частоты должны быть, как правило, достаточно сильно разнесены, что на практике приводит к усложнению приемопередающей аппаратуры РЛС и не всегда приемлемо по ряду организационных и технических причин. Кроме того, большинство методов повышения точности измерения угла места НЛЦ такого типа требуют реализации существенно более сложных алгоритмов первичной обработки радиолокационной информации (ПОИ), чем в классических моноимпульсных РЛС с фиксированной несущей частотой зондирующих импульсов.
К третьей группе относятся способы коррекции ошибок в измерениях угла места НЛЦ на этапе вторичной обработки радиолокационной информации (ВОИ). Главным достоинством таких методов является отсутствие необходимости в усложнении конструкции антенны и приемопередающей аппаратуры РЛС, а также алгоритмов ПОИ. Примером такого подхода является наиболее близкий к заявляемому изобретению патент РФ [RU №2307375 С1, МПК G01S 13/04. Способ измерения угла места низколетящей цели и радиолокационная станция для его реализации, 2010 г.], в котором предварительно с помощью дополнительных радиолокационных, оптических или других средств измеряют начальный угол места цели ε0 и дальность до цели R0 в начальный момент времени сопровождения. После чего, при дальнейшем движении НЛЦ постоянно измеряют дальность до нее и по заданной формуле вычисляют текущий угол места цели с учетом сферической формы Земли и в предположении, что цель летит строго на постоянной высоте.
Очевидными недостатками такого способа являются: необходимость точного измерения начального угла ε0, для чего нужно иметь дополнительную РЛС с узким лучом или оптическую систему, а также большие ошибки при сопровождении целей, движущихся пусть и с плавным, но маневром по высоте. Чтобы отказаться от использования дополнительной РЛС или оптической системы в прототипе также предложен режим работы, при котором предварительно фиксируются углы закрытия по всем возможным азимутальным направлениям, которые затем принимаются в качестве начальных углов ε0 при появлении цели на радиогоризонте. Но такой режим также не лишен недостатков: во-первых, отсутствует уверенность в том, что цель будет обнаружена сразу же после ее появления над радиогоризонтом, т.к. обзоры по отдельным азимутальным направлениям могут происходить с достаточно большим периодом, и цель впервые будет обнаружена на угле, уже далеко не равном углу закрытия; во-вторых, такой режим в принципе возможен только при сопровождении целей, приближающихся к РЛС.
Техническим результатом изобретений является существенное повышение точности определения угла места и высоты НЛЦ в условиях многолучевого распространения радиоволн. Причем, в отличие от прототипа, предлагаемое изобретение может использоваться без ограничений, как при сопровождении плавно маневрирующих в вертикальной плоскости НЛЦ, так и целей, летящих в любом направлении относительно РЛС. Поскольку предлагаемое изобретение не требует изменения конструкции антенны и алгоритмов работы ПОИ, то оно легко может быть реализовано, как на вновь проектируемых РЛС, так и при модернизации уже существующих.
Технический результат изобретения достигается за счет использования нестационарной регрессионной зависимости между углом места цели и наклонной дальностью до нее. При этом, параметрическая идентификация такой зависимости производится в онлайн режиме в процессе сопровождения НЛЦ с помощью рекуррентного метода наименьших квадратов (МНК).
Сущность изобретений поясняется с помощью чертежей, где:
- на фиг. 1 представлены зависимости от времени: истинного значения угла места НЛЦ (1); значения угла места НЛЦ, непосредственно имитирующего измерение моноимпульсной РЛС миллиметрового диапазона (2); значения угла места НЛЦ, полученного предлагаемым способом (3);
- на фиг. 2 - зависимости от величины, обратной к дальности: истинного значения угла места НЛЦ (1); значения угла места НЛЦ, непосредственно имитирующего измерение моноимпульсной РЛС миллиметрового диапазона (2);
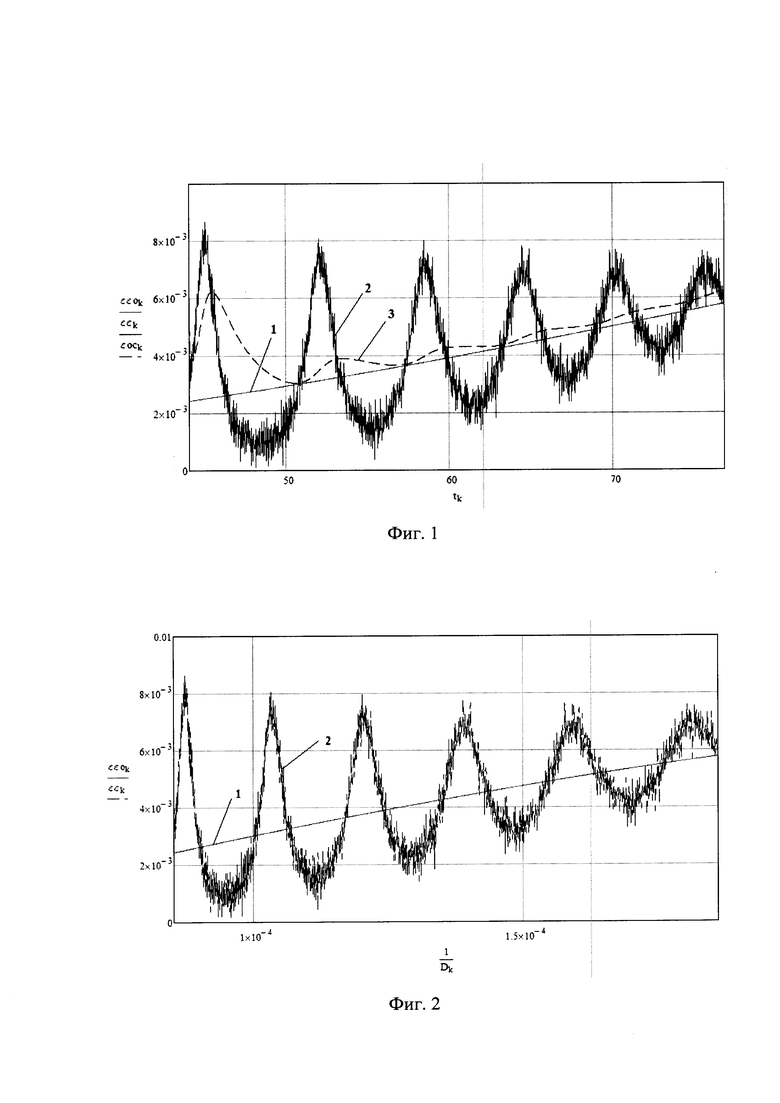
- на фиг. 3 - сравнение работы прототипа и предлагаемого изобретения при сопровождении моноимпульсной РЛС НЛЦ, летящей на постоянной высоте: значение непосредственно измеренной РЛС высоты НЛЦ (1); значение высоты НЛЦ, полученное с использованием прототипа (2); значение высоты НЛЦ, полученное предлагаемым способом (3); эталонное значение высоты НЛЦ, измеренное оптической системой (4);
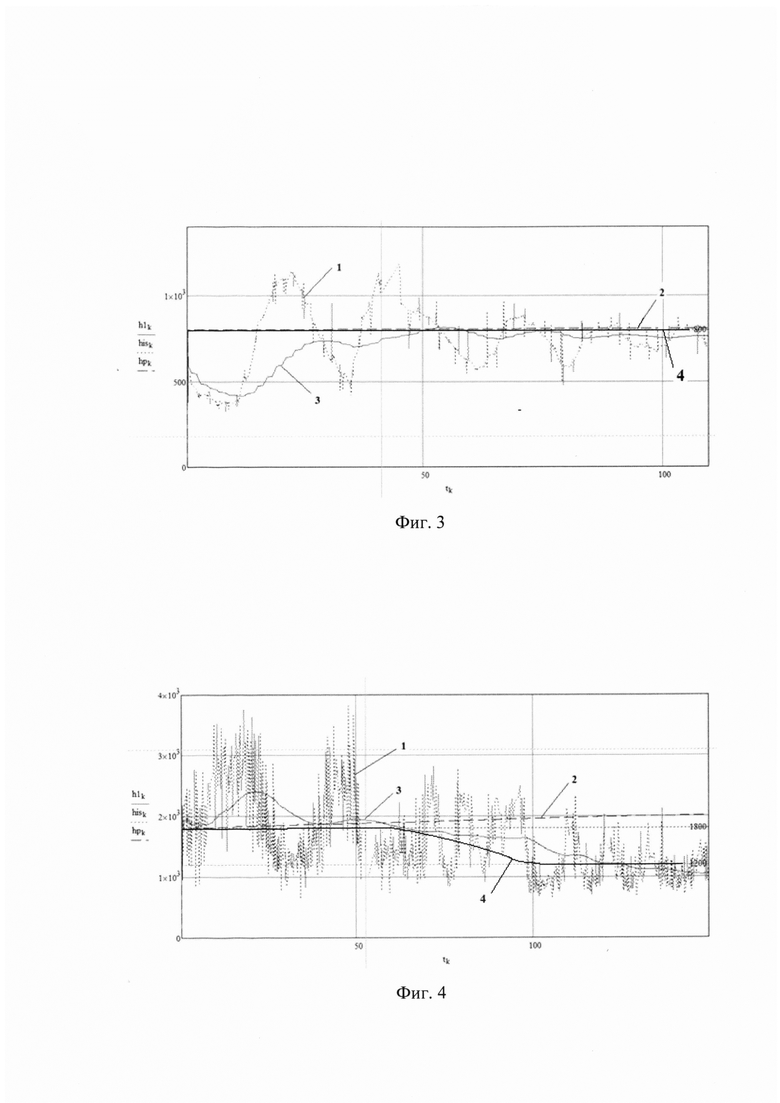
- на фиг. 4 - сравнение работы прототипа и предлагаемого изобретения при сопровождении моноимпульсной РЛС НЛЦ, движущейся с маневром в вертикальной плоскости: значение непосредственно измеренной РЛС высоты НЛЦ (1); значение высоты НЛЦ, полученное с использованием прототипа (2); значение высоты НЛЦ, полученное предлагаемым способом (3); эталонное значение высоты НЛЦ, измеренное оптической системой (4);
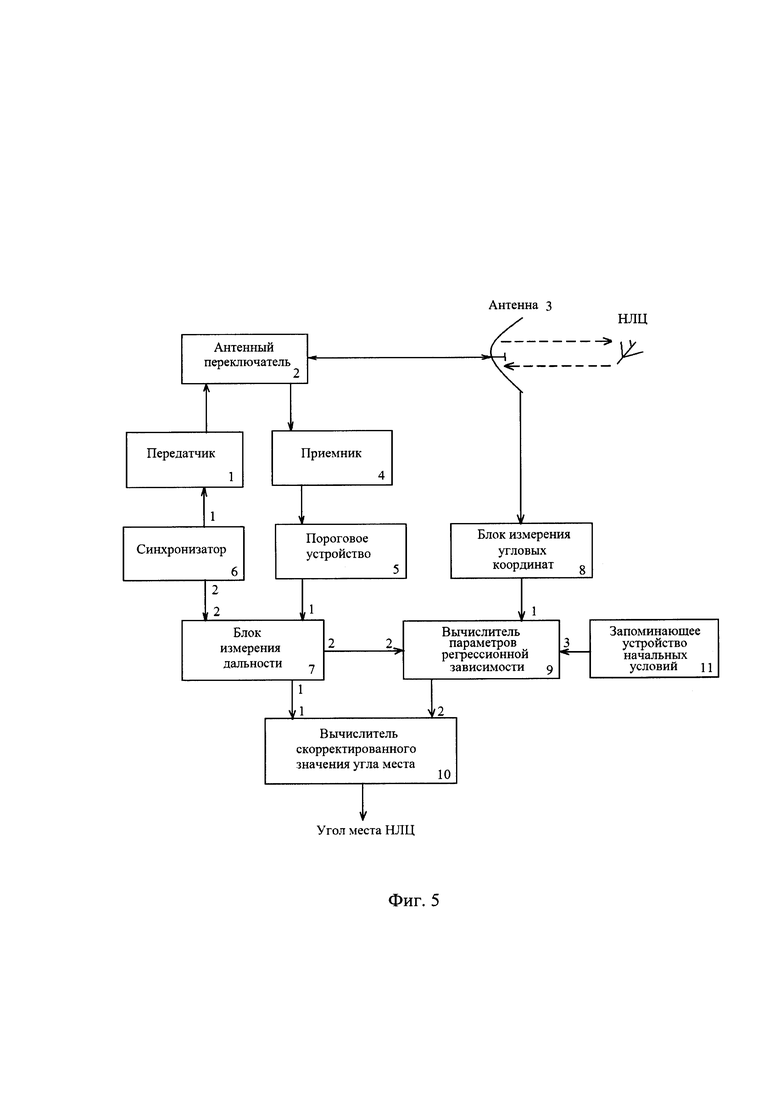
- на фиг. 5 представлена схема моноимпульсной РЛС, реализующей предлагаемый способ определения угла места НЛЦ.
Известно, что зависимость высоты цели от угла места в дискретный момент времени (канальный интервал работы РЛС) k имеет вид:
h(k)=D(k)⋅sinε(k),
где D(k) - текущая дальность до цели.
Поскольку, в случае НЛЦ угол места очень мал, то sinε(k)≈ε(k), следовательно, можно записать:

На фиг. 2 представлена зависимость измерений угла места НЛЦ от величины обратной к измеренной дальности для случая, приведенного на фиг. 1.
Предполагая, что высота НЛЦ может быть либо постоянной, либо очень медленно изменяться, поскольку резкие маневры в вертикальной плоскости на малой высоте у большинства целей (за исключением вертолетов и квадрокоптеров) крайне маловероятны, зависимость измерения угла места от величины обратной к дальности в дискретном времени с учетом соотношения (1) можно представить дискретным нестационарным стохастическим уравнением линейной регрессии:

где b0(k) и b1(k) - зависящие от времени коэффициенты регрессии; u1(k)=1/D(k) - регрессор (величина обратная к дальности, измеренная в момент времени k); w(k) - случайная ошибка измерений угла места, которая в общем случае для НЛЦ из-за интерференции будет коррелированной (см. фиг. 2).
Наличие в уравнении регрессии (2) двух зависящих от времени коэффициентов b0(k) и b1(k) позволяет не только учесть прямо пропорциональную связь между измеренным углом места и величиной обратной к дальности согласно формуле (1), но и возможное плавное изменение высоты цели в полете. Причем, идентификацию этих коэффициентов, очевидно, нужно производить в реальном масштабе времени, например, с использованием рекуррентного МНК [Гроп Д. Методы идентификации систем / Д. Гроп. - М.: «Мир», 1979].
В этом случае на каждом канальном интервале k по непосредственным измерениям угла места ε(k) и дальности D(k) в моноимпульсной РЛС рекуррентным МНК идентифицируют коэффициенты b0(k) и b1(k), а затем с использованием зависимости (2), приравняв случайную ошибку измерений угла места w(k) к нулю, вычисляют угол места НЛЦ с уже компенсированным влиянием многолучевого распространения радиоволн.
Причем, если предположить, что случайная ошибка измерений угла места w(k) имеет нулевое математическое ожидание, чего можно добиться путем юстировки измерений угла места НЛЦ в РЛС по его измерениям, например, оптической системой, не подверженной влиянию многолучевого распространения радиоволн, то МНК оценка коэффициентов b0(k) и b1(k), а значит, и оценка реального угла места будут устойчивыми в среднеквадратическом смысле и несмещенными, при минимальном требовании ограниченности помехи w(k) [Граничин О.Н. Рандомизированные алгоритмы оптимизации и оценивания при почти произвольных помехах / О.Н. Граничин, Б.Т. Поляк. - М.: Наука, 2003].
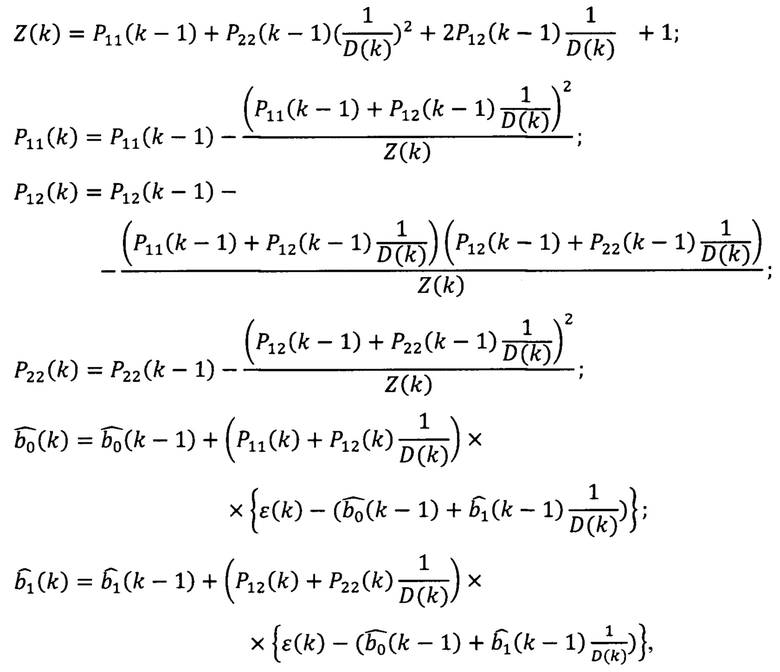
Таким образом, предлагаемый способ компенсации влияния многолучевого распространения радиоволн при сопровождении НЛЦ может быть легко реализован практически на любых вычислительных устройствах ВОИ моноимпульсной РЛС. На первом этапе по текущим измерениям угла места и дальности до цели идентифицируют коэффициенты b0(k) и b1(k) регрессии с использованием рекуррентного МНК, который в векторно-матричном виде представляется следующими формулами для вычисления оценок и их ковариационной матрицы [Гроп Д. Методы идентификации систем / Д. Гроп. - М.: «Мир», 1979]:


где Р(k) - симметричная относительно своей главной диагонали ковариационная матрица ошибок оценивания коэффициентов регрессионной зависимости (2) размерностью 2×2;  - вектор оценок коэффициентов в уравнении регрессии (2); u(k)T=[1 1/D(k)] - вектор регрессоров.
- вектор оценок коэффициентов в уравнении регрессии (2); u(k)T=[1 1/D(k)] - вектор регрессоров.
Векторно-матричные уравнения (3)-(4) можно легко преобразовать к скалярному виду, что повысит их вычислительную эффективность, исключив лишние умножения на ноль или единицу:
Затем на втором этапе с использованием полученной регрессионной зависимости по формуле:  вычисляют угол места НЛЦ с компенсированным негативным влиянием многолучевого распространения радиоволн.
вычисляют угол места НЛЦ с компенсированным негативным влиянием многолучевого распространения радиоволн.
Осуществимость предлагаемого изобретения подтверждается результатами имитационного моделирования, произведенного с помощью известной модели многолучевого распространения радиоволн [Sherman S.M., Barton В.K. Monopulse Principles and Techniques. - Artech House, 2011], которая использовалась для имитации измерений угла места в моноимпульсной РЛС, искаженных помехами в виде низкочастотных квазигармонических колебаний, а также дополнительно зашумленных гауссовским белым шумом. Таким образом, на фиг. 1 цифрой 1 обозначено истинное значение угла места НЛЦ; цифрой 2 - значение угла места НЛЦ, непосредственно имитирующее измерение моноимпульсной РЛС миллиметрового диапазона и шириной диаграммы направленности антенны 0,4°; цифрой 3 - значение угла места НЛЦ, полученное предлагаемым способом. При этом, имитировался полет цели на высоте 29-31 м с дальности примерно 10 км в направлении РЛС со скоростью от 250 до 100 м/с над спокойным морем (коэффициент отражения равен примерно 1). Очевидно, что предлагаемый способ позволяет после непродолжительного переходного процесса практически полностью скомпенсировать негативное влияние многолучевого распространения радиоволн на измерения угла места НЛЦ.
На фиг. 3 и 4 представлено сравнение работы прототипа и предлагаемого изобретения при сопровождении НЛЦ моноимпульсной РЛС с длинной волны 10 см и шириной диаграммы направленности антенны 6°. На фиг. 3 и 4 цифрой 1 обозначено значение непосредственно измеренной РЛС высоты НЛЦ; цифрой 2 - значение высоты НЛЦ, полученное с использованием прототипа; цифрой 3 - значение высоты НЛЦ, полученное предлагаемым способом; цифрой 4 - значение высоты НЛЦ, измеренное оптической системой (эталон). При этом, на фиг. 3 цель двигалась с дальности 13 км до дальности 7 км на постоянной высоте 800 м со скоростью около 60 м/с. На фиг 4. цель двигалась со скоростью около 220 м/с с дальности 57,5 км до дальности 24,6 км сначала до 60-й секунды на высоте 1800 м, затем до 100-й секунды происходило плавное снижение цели до высоты 1200 м, после чего цель продолжила двигаться на этой высоте. При постоянной и абсолютно точно известной в начальный момент времени высоте цели прототип, естественно, обеспечивает практически идеальное сопровождение НЛЦ в условиях многолучевого распространения радиоволн, что следует из фиг. 3. Предлагаемый же способ в этом случае, как и при имитационном моделировании (см. фиг. 1.), после непродолжительного переходного процесса позволяет получить вполне приемлемый результат, в значительной степени скомпенсировав негативное влияние многолучевого распространения радиоволн. В условиях же плавного маневрирования цели по высоте, как показано на фиг. 4, прототип демонстрирует полную неработоспособность в отличие от предлагаемого способа, который и в этом случае позволяет получить вполне приемлемый результат.
Прототипом заявляемой моноимпульсной РЛС является РЛС, содержащая передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловых координат, вычислитель угла места НЛЦ и запоминающее устройство. Указанные узлы и блоки РЛС соответствующим образом связаны между собой [RU №2307375 С1, МПК G01S 13/04. Способ измерения угла места низколетящей цели и радиолокационная станция для его реализации, 2010 г.].
Заявляемая моноимпульсная РЛС (фиг. 5) содержит: передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок измерения дальности 7, блок измерения угловых координат 8, вычислитель коэффициентов регрессионной зависимости 9, вычислитель скорректированного значения угла места 10 и запоминающее устройство начальных условий 11, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, первый выход синхронизатора 6 соединен с синхровходом передатчика 1, выход порогового устройства 5 соединен с первым входом блока измерения дальности 7, второй вход которого соединен со вторым выходом синхронизатора 6, первый выход блока измерения дальности 7 соединен с первым входом вычислителя скорректированного значения угла места 10, выход антенны 3 соединен со входом блока измерения угловых координат 8, выход которого соединен с первым входом вычислителя параметров регрессионной зависимости 9, второй выход блока измерения дальности 7 соединен со вторым входом вычислителя параметров регрессионной зависимости 9, выход которого соединен со вторым входом вычислителя скорректированного значения угла места 10, третий вход вычислителя параметров регрессионной зависимости 9 соединен с выходом запоминающего устройства начальных условий 11.
Заявляемая моноимпульсная РЛС может быть реализована с использованием современных стандартных функциональных элементов для станций такого типа (Справочник по радиолокации / Под ред. М.И. Сколника. В 2-х книгах, М.: Техносфера, 2014): твердотельного импульсного передатчика 1, супергетеродинного приемника 4, антенного переключателя 2, синхронизатора 6, порогового устройства 5, блока измерения дальности 7 и угловых координат 8, а также антенны 3 в виде фазированной антенной решетки с электронным сканированием по угловым координатам. Вычислитель коэффициентов регрессионной зависимости 9, реализующий формулы (5)-(10) и вычислитель скорректированного значения угла места 10, реализующий формулу (11), а также запоминающее устройство начальных условий 11 могут быть построены с применением современных цифровых микросхем отечественного производства (Все отечественные микросхемы / 2-ое изд., М.: Изд. дом «Додэка XXI», 2004).
Работа заявляемой РЛС при измерении угла места НЛЦ происходит следующим образом.
Перед началом работы РЛС в режиме сопровождения НЛЦ в запоминающее устройство начальных условий 11 записывают начальные значения идентифицируемых коэффициентов регрессионной зависимости (2): 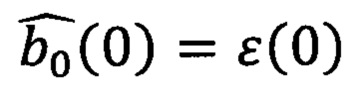 и
и  где ε(0) и D(0) - угол места и дальность цели, измеренные в момент включения режима сопровождения НЛЦ, а также элементы симметричной квадратной матрицы ковариаций ошибок этих коэффициентов Р11(0)=1, P12(0)=0, Р22(0)=105-107. Данные начальные условия были подобраны для конкретной РЛС с длиной волны 10 см. В целом, рекуррентный МНК не очень чувствителен к заданию начальных условий [Гроп Д. Методы идентификации систем / Д. Гроп. - М.: «Мир», 1979], поэтому для других типов РЛС, при необходимости, могут быть легко экспериментальным путем подобраны свои оптимальные значения начальных условий.
где ε(0) и D(0) - угол места и дальность цели, измеренные в момент включения режима сопровождения НЛЦ, а также элементы симметричной квадратной матрицы ковариаций ошибок этих коэффициентов Р11(0)=1, P12(0)=0, Р22(0)=105-107. Данные начальные условия были подобраны для конкретной РЛС с длиной волны 10 см. В целом, рекуррентный МНК не очень чувствителен к заданию начальных условий [Гроп Д. Методы идентификации систем / Д. Гроп. - М.: «Мир», 1979], поэтому для других типов РЛС, при необходимости, могут быть легко экспериментальным путем подобраны свои оптимальные значения начальных условий.
В процессе работы РЛС осуществляет обзор заданной зоны. Для этого в передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируют зондирующие сигналы, которые через антенный переключатель 2 с помощью антенны 3 излучают в пространство. Как только в зоне обзора РЛС появляется НЛЦ, отраженные от нее сигналы принимают антенной 3, которые через антенный переключатель 2 поступают в приемник 4. С выхода приемника 4 сигналы подают на вход порогового устройства 5, где их сравнивают с порогом обнаружения. Если уровень сигналов превышает пороговый, то они проходят на выход порогового устройства 5 и далее поступают на первый вход блока измерения дальности 7, на второй вход которого подают сигналы с синхронизатора 6. В блоке измерения дальности 7 происходит определение текущей дальности до НЛЦ по времени запаздывания отраженных радиосигналов с порогового устройства 5 относительно зондирующих сигналов с синхронизатора 6. В блоке измерения угловых координат 8 по направлению, с которого на антенну 3 поступили отраженные радиосигналы измеряют текущий угол места НЛЦ, который затем передают на первый вход вычислителя коэффициентов регрессионной зависимости 9. На второй вход вычислителя коэффициентов регрессионной зависимости 9 поступают сигналы с блока измерения дальности 7. Таким образом, по текущим измерениям дальности и угла места в вычислителе коэффициентов регрессионной зависимости 9 по рекуррентным формулам (5)-(10) определяют коэффициенты, которые затем на этом же такте работы РЛС используют в вычислителе скорректированного значения угла места 10, где по формуле (11) с использованием измеренной текущей дальности получают угол места НЛЦ с компенсированным негативным влиянием многолучевого распространения радиоволн.
Изобретения относятся к радиолокации и могут быть использованы в моноимпульсных радиолокационных станциях (РЛС) при сопровождении низколетящих целей (НЛЦ) на малых углах места в условиях наличия мешающих отражений от подстилающей поверхности. Техническим результатом является повышение точности измерения угла места и высоты НЛЦ в условиях многолучевого распространения радиоволн. В заявленном способе в РЛС при реализации вторичной обработки радиолокационной информации используют линейную нестационарную регрессионную зависимость между углом места цели и наклонной дальностью до нее. Моноимпульсная РЛС, реализующая способ определения угла места, содержит передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор и запоминающее устройство начальных условий. В нее дополнительно введены блок измерения дальности, блок измерения угловых координат, вычислитель параметров регрессионной зависимости и вычислитель скорректированного значения угла места. 2 н.п. ф-лы, 5 ил.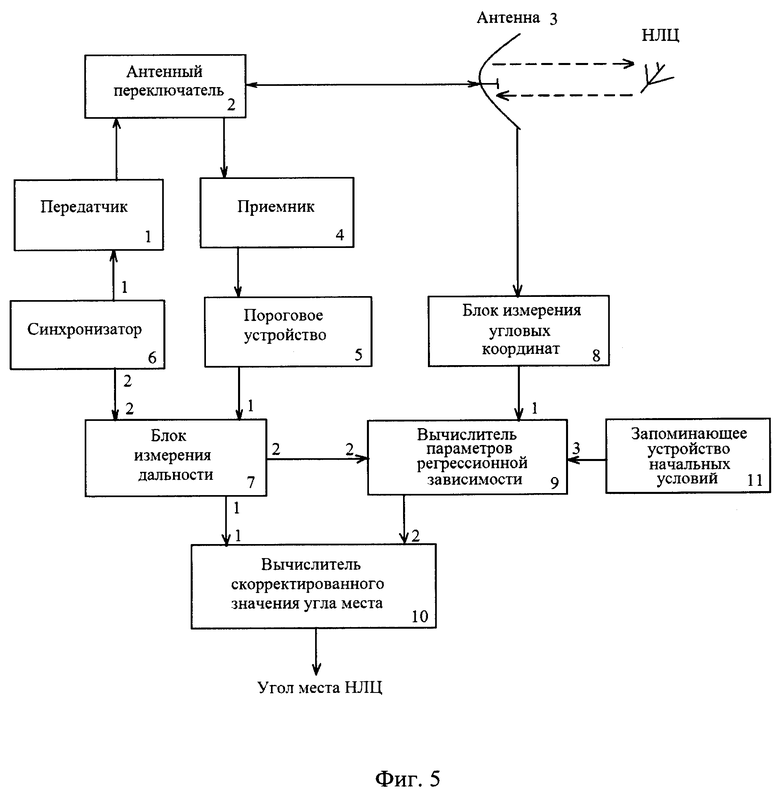
1. Способ определения угла места низколетящей цели (НЛЦ) с помощью моноимпульсной РЛС, включающий обнаружение НЛЦ и измерение дальности до нее, отличающийся тем, что в процессе сопровождения на каждом канальном интервале работы станции строят зависимость в виде дискретного нестационарного стохастического уравнения линейной регрессии
ε(k)=b0(k)+b1(k)u1(k)+w(k),
где b0(k) и b1(k) - зависящие от времени коэффициенты регрессии; u1(k)=1/D(k) - регрессор - величина, обратная к дальности, измеренная в момент времени k; w(k) - случайная коррелированная ошибка измерений угла места; при этом на первом этапе по текущим измерениям угла места и дальности до цели идентифицируют коэффициенты b0(k) и b1(k) регрессии с использованием рекуррентного метода наименьших квадратов
где P11(k), Р12(k), P22(k) - элементы симметричной квадратной матрицы ковариаций ошибок оценивания коэффициентов  и
и  размерностью 2×2; затем на втором этапе с использованием полученной регрессионной зависимости по формуле
размерностью 2×2; затем на втором этапе с использованием полученной регрессионной зависимости по формуле  вычисляют угол места НЛЦ с компенсированным негативным влиянием многолучевого распространения радиоволн.
вычисляют угол места НЛЦ с компенсированным негативным влиянием многолучевого распространения радиоволн.
2. Моноимпульсная радиолокационная станция, содержащая передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор и запоминающее устройство начальных условий, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен со входом порогового устройства, первый выход синхронизатора соединен с синхровходом передатчика, отличающаяся тем, что в нее дополнительно введены блок измерения дальности, блок измерения угловых координат, вычислитель параметров регрессионной зависимости и вычислитель скорректированного значения угла места, при этом выход порогового устройства соединен с первым входом блока измерения дальности, второй вход которого соединен со вторым выходом синхронизатора, первый выход блока измерения дальности соединен с первым входом вычислителя скорректированного значения угла места, выход антенны соединен со входом блока измерения угловых координат, выход которого соединен с первым входом вычислителя параметров регрессионной зависимости, второй выход блока измерения дальности соединен со вторым входом вычислителя параметров регрессионной зависимости, выход которого соединен со вторым входом вычислителя скорректированного значения угла места, третий вход вычислителя параметров регрессионной зависимости соединен со выходом запоминающего устройства начальных условий.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| Способ повышения точности определения угла пеленга цели при сохранении взаимозаменяемости антенны в составе системы | 2019 |
|
RU2731879C1 |
| Способ точного сопровождения по углу места низколетящей цели в условиях интерференции | 2017 |
|
RU2682239C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОМЕСТНОЙ КООРДИНАТЫ НИЗКОЛЕТЯЩЕЙ ЦЕЛИ | 2010 |
|
RU2444750C2 |
| ГРАЧЕВ А.Н., КУРБАТСКИЙ С.А., ХОМЯКОВ А.В | |||
| Алгоритм трассового сопровождения низколетящих целей в моноимпульсных радиолокационных станциях на основе сигма-точечного фильтра // Журнал "Радиотехника и электроника", | |||
