Область техники, к которой относится изобретение
Изобретение относится к датчику для измерения плотности и вязкости текучей среды (флюида). Датчик основан на использовании механических элементов, вибрирующих в измеряемой текучей среде (флюиде).
Изобретение можно применять для измерения плотности и вязкости в нефтедобывающей промышленности, в химической промышленности, в пищевой промышленности и т.д.
Уровень техники
Плотность - это величина, равняющаяся массе среды в единице объема. В системе СИ единицей плотности является килограмм на кубический метр (кг/м3). Например, при нормальных температуре и давлении плотность воды равна 1000 кг/м3, а этилового спирта - 790 кг/м3.
Вязкость - это величина, характеризующая сопротивляемость текучей среды (флюида) деформации при напряжении сдвига. Вязкость описывает внутреннее сопротивление текучей среды (флюида) течению и может считаться мерой трения текучей среды (флюида). Физической единицей динамической вязкости в системе СИ является паскаль-секунда (Па/с). Физической единицей динамической вязкости в системе СГС является пуаз (П). Более принято его выражать в сантипуазах (сП), особенно по стандартам Американского общества по испытаниям и материалам. Например, вязкость воды равна 1,0 сП (при 20°C).
Из патентного документа EP 0282251 известен датчик для измерения плотности и вязкости текучей среды (флюида). Датчик содержит два параллельных зубца, идущих от общего ярма, образующих камертон, выполненный с возможностью погружения в текучую среду (флюид). Посредством одного или нескольких пьезоэлектрических возбуждающих элементов, расположенных в одной или нескольких полостях в зубцах или ярме, зубцы возбуждаются резонансно или в противофазе. Эти колебания воспринимаются одним или несколькими пьезоэлектрическими чувствительными элементами, расположенными аналогичным образом.
Типичный размер датчика составляет несколько сантиметров, что требует наличия громоздкого и дорогостоящего корпуса для датчика. Это ведет к тому, что измерительное устройство оказывается весьма интрузивным, что не позволяет использовать его в пробоотборных камерах или небольших трубах. Кроме того, из-за больших размеров очень трудно обеспечить работу при высоком давлении и высокой температуре.
Сущность изобретения
Одна цель настоящего изобретения заключается в том, чтобы предложить датчик для измерения плотности и вязкости текучей среды (флюида), посредством которой преодолевается, по меньшей мере, один из недостатков уровня техники.
В соответствии с первым объектом изобретения, схема типа «возбуждение-обнаружение» настоящего датчика основана на передаче механического сигнала через мембрану, имеющую с одной стороны исполнительный/обнаруживающий элемент, изолированный от текучей среды (флюида), а с другой стороны резонирующий элемент, погруженный в текучую среду (флюид). Более конкретно, датчик плотности и вязкости согласно изобретению содержит резонирующий элемент, выполненный с возможностью погружения в текучую среду (флюид), исполнительный/обнаруживающий элемент, соединенный с резонирующим элементом, и разъем для соединения с исполнительным/обнаруживающим элементом. Датчик дополнительно содержит корпус, образующий камеру, изолированную от текучей среды (флюида), причем корпус содержит область уменьшенной толщины, образующую мембрану, отделяющую камеру от текучей среды (флюида). Исполнительный/обнаруживающий элемент расположен внутри камеры таким образом, чтобы быть изолированным от текучей среды (флюида) и механически соединенным с мембраной. Резонирующий элемент выполнен с возможностью погружения его в текучую среду (флюид) и механически соединен с мембраной. Толщина мембраны обеспечивает сопротивление давлению и передачу механических колебаний между исполнительным/обнаруживающим элементом и резонирующим элементом. Получающаяся жесткость мембраны позволяет отделить свойства резонирующего элемента от исполнительного/обнаруживающего элемента.
Более конкретно датчик плотности и вязкости согласно изобретению содержит резонирующий элемент, выполненный с возможностью погружения в текучую среду (флюид), исполнительный/обнаруживающий элемент, соединенный с резонирующим элементом, и разъем для соединения с исполнительным/обнаруживающим элементом. Датчик далее содержит корпус, образующий камеру, изолированную от текучей среды (флюида), причем корпус содержит область уменьшенной толщины, образующую мембрану, отделяющую камеру от текучей среды (флюида). Исполнительный/ обнаруживающий элемент расположен внутри камеры таким образом, чтобы быть изолированным от текучей среды (флюида) и механически соединенным с мембраной. Резонирующий элемент, выполненный с возможностью погружения в текучую среду (флюид), механически соединен с мембраной. Толщина мембраны позволяет передавать механические колебания между исполнительным/обнаруживающим элементом и резонирующим элементом.
Резонирующий элемент может быть механически соединен с мембраной механическим соединяющим элементом.
Область уменьшенной толщины может образовывать полость, в которой закреплен исполнительный/обнаруживающий элемент.
Исполнительный/обнаруживающий элемент может содержать, по меньшей мере, один пьезоэлектрический элемент. Пьезоэлектрический элемент имеет первую и вторую сторону, причем первая сторона соединена с разъемом соединительным проводом, а вторая сторона электрически соединена с мембраной.
Пьезоэлектрический элемент может быть придвинут к полости посредством вставочного узла, ввинчиваемого в полость. Вставка содержит отверстие для соединения с соединительным проводом.
Разъем может быть коаксиальным разъемом, содержащим внешнюю металлическую часть, соединенную с корпусом, и внутреннюю металлическую часть, соединенную с соединительным проводом, причем внешняя и внутренняя металлическая части разделены изолирующей частью.
Датчик может далее содержать терморезистор, расположенный внутри камеры.
Датчик может содержать электронное устройство для перевода исполнительного/обнаруживающего элемента из исполнительного режима в обнаруживающий режим и наоборот.
Резонирующий элемент содержит первое коромысло для измерения первого диапазона плотности и вязкости. Он может дополнительно содержать, по меньшей мере, второе коромысло для измерения второго диапазона плотности и вязкости. Резонирующий элемент может быть выбран из группы резонирующих элементов, содержащей:
- одинарное коромысло, центр которого, определенный с доступной точностью, прикреплен к соединяющему элементу,
- одинарное коромысло, прикрепленное одним концом к соединяющему элементу,
- U-образное коромысло, содержащее первую продольную часть, соединенную со второй изогнутой частью, прикрепленной одним концом к соединяющему элементу, и
- двойное коромысло, содержащее прикрепленные друг к другу первое коромысло и второе коромысло, причем первое коромысло прикреплено к соединяющему элементу.
Коромысло предпочтительно может содержать, по меньшей мере, одну проволоку, ориентированную в направлении потока текучей среды (флюида).
Согласно второму аспекту изобретения, способ измерения плотности и вязкости текучей среды (флюида) основан на определенной схеме типа «возбуждение-обнаружение». Схема типа «возбуждение-обнаружение» основана на элементарной последовательности, содержащей три фазы: фазу возбуждения, фазу ожидания и фазу обнаружения. Во время фазы возбуждения на исполнительный/обнаруживающий элемент подают возбуждающий сигнал начальной частоты, состоящий из М периодов (например, М равно 4). Фаза ожидания длится N периодов (например, N равно 1). Фаза обнаружения длится P периодов (например, P равно 3). Элементарная последовательность повторяется K раз (например, K имеет порядок добротности Q) для начальной частоты, позволяя таким образом определить измеряемую или фактическую синфазную спектральную компоненту и измеряемую или фактическую квадратурную спектральную компоненту.
Согласно первому варианту осуществления изобретения эти этапы повторяются при различных частотах, находящихся между начальной частотой и последней частотой, которые включают в себя резонансную частоту резонирующего элемента. Получают измеренный или фактический синфазный и квадратурный спектр.
Согласно второму варианту осуществления изобретения эти этапы повторяются для различных частот, находящихся между начальной частотой и последней частотой, которые включают в себя резонансную частоту резонирующего элемента, и для двух различных значений числа периодов N (например, для N=1 и для N=4). Определение измеренной синфазной спектральной компоненты и измеренной квадратурной спектральной компоненты заключается в вычислении разности между синфазными спектральными компонентами, полученными для двух различных значений числа периодов N. Та же операция проделывается с квадратурными спектральными компонентами. Получают измеренные или фактические синфазные и квадратурные спектры.
Затем осуществляется параметрическая идентификация на синфазном спектре и квадратурном спектре. Параметрическая идентификация заключается в сравнении измеренного спектра относительно теоретического спектра, вычисленного на основе множества дискретных значений пары добротность - резонансная частота. Для каждой пары добротность - резонансная частота вычисляют первый и второй коэффициенты взаимной корреляции соответственно для синфазного спектра и квадратурного спектра. Пара добротность - резонансная частота, соответствующая максимуму нормированной суммы первого и второго коэффициентов взаимной корреляции, определяет добротность и резонансную частоту резонирующего элемента, помещенного в измеряемую текучую среду (флюид).
Более конкретно способ измерения плотности и вязкости согласно изобретению содержит этапы, на которых:
a) подают возбуждающий сигнал на резонирующее устройство, содержащее исполнительный/обнаруживающий элемент и резонирующий элемент, выполненный с возможностью погружения в текучую среду (флюид), причем сигнал возбуждения имеет первую частоту,
b) обнаруживают сигнал приема, подаваемый резонирующим устройством;
c) повторяют этап подачи возбуждающего сигнала и обнаружения сигнала приема при различных частотах, так чтобы охватить диапазон частот в соответствии с шагом приращения частоты,
d) определяют синфазный фактический отклик датчика и квадратурный фактический отклик датчика на сигнал приема, обнаруженный в диапазоне частот,
e) вычисляют модельный синфазный отклик датчика и модельный квадратурный отклик датчика на основе начальной резонансной частоты и начальной добротности резонирующего элемента,
f) сравнивают модельный синфазный отклик датчика с фактическим синфазным откликом датчика и модельный квадратурный отклик датчика с фактическим квадратурным откликом датчика посредством определения коэффициента сопряженной корреляции,
g) повторяют этап вычисления и этап сравнения при измененной резонансной частоте и измененной добротности и запоминают определенный номер модифицированной резонансной частоты и модифицированной добротности и коэффициента сопряженной корреляции,
h) определяют итоговую резонансную частоту и итоговую добротность резонирующего элемента в текучей среде (флюиде) на основе определенного номера коэффициента сопряженной корреляции, и
i) определяют плотность и вязкость текучей среды (флюида) на основе итоговой резонансной частоты, итоговой добротности и выполненного с доступной точностью аналитического моделирования резонирующего элемента.
Этапы сравнения и определения резонансной частоты и добротности могут быть основаны на параметрической идентификации, заключающейся в том, что:
- вычисляют нормированную сумму коэффициентов корреляции для каждого модельного отклика датчика, вычисленного для определенного номера резонансных частот и добротности резонирующего элемента, и
- определяют итоговую резонансную частоту и итоговую добротность, соответствующие паре резонансная частота/добротность, которая связана с наибольшей нормированной суммой коэффициентов корреляции.
Согласно первой схеме возбуждения возбуждающий сигнал имеет определенную частоту, которая повторяется несколько раз, а определение фактического синфазного отклика датчика и фактического квадратурного отклика датчика основано на среднем значении сигналов приема для каждой частоты, обнаруженной в диапазоне частот.
Согласно второй схеме возбуждения возбуждающий сигнал содержит первый возбуждающий сигнал и второй возбуждающий сигнал, причем первый возбуждающий сигнал имеет первое число периодов, а второй возбуждающий сигнал имеет второе число периодов. Возбуждающие сигналы повторяются на различных частотах таким образом, чтобы был пройден диапазон частот согласно приращению шага частоты, при этом с первым сигналом возбуждения связан первый сигнал приема, а со вторым сигналом возбуждения связан второй сигнал приема. Фактический синфазный отклик датчика определяется на основе вычисления разности между фактическим синфазным откликом датчика, связанным с первым сигналом приема, и фактическим синфазным откликом датчика, связанным со вторым сигналом приема. Фактический квадратурный отклик датчика определяется на основе вычисления разности между фактическим квадратурным откликом датчика, связанным с первым сигналом приема, и фактическим квадратурным откликом датчика, связанным со вторым сигналом приема.
Таким образом, согласно изобретению элементы возбуждения/обнаружения полностью изолированы от текучей среды (флюида). Поскольку частями датчика, погруженными в текучую среду (флюид), являются только резонирующий элемент и часть корпуса, датчик согласно изобретению обладает высокой химической стойкостью, высокой жаростойкостью и высокой температурной стойкостью.
Конструкция датчика требует минимального вмешательства в линию потока измеряемой текучей среды (флюида), что позволяет не допускать возмущения потока текучей среды (флюида), возникновения эрозии, потенциальной закупорки и обеспечивает надежную работу датчика в течение длительного времени.
Кроме того, разъединение исполнительной/обнаруживающей части и резонирующей части обеспечивает полную свободу в выборе материала для резонирующего элемента вне зависимости от его электрических свойств. В частности, можно использовать сплавы с высокой коррозионной стойкостью или высокопрочные кристаллы.
Кроме того, поскольку отсутствует электрическое сквозное питание между резонирующим элементом и исполнительным/обнаруживающим элементом, корпус датчика может быть выполнен из простого и прочного монолитного блока. Тем самым снижаются эффекты, связанные с напряжениями, вызванными изменением температуры. Датчик может быть более миниатюрным по сравнению с датчиком, известным из уровня техники, и может быть выполнен с возможностью применения в тяжелых условиях окружающей среды. Кроме того, он может быть изготовлен с низкими затратами.
Наконец, способ измерения согласно изобретению обеспечивает кардинальное снижение фоновых смещений и шума. Это в значительной степени расширяет область применения датчика и повышает надежность и точность прогнозирования плотности и вязкости.
Краткое описание чертежей
Настоящее изобретение иллюстрируется посредством примеров и не ограничивается прилагаемыми чертежами, на которых схожие номера позиций относятся к подобным элементам:
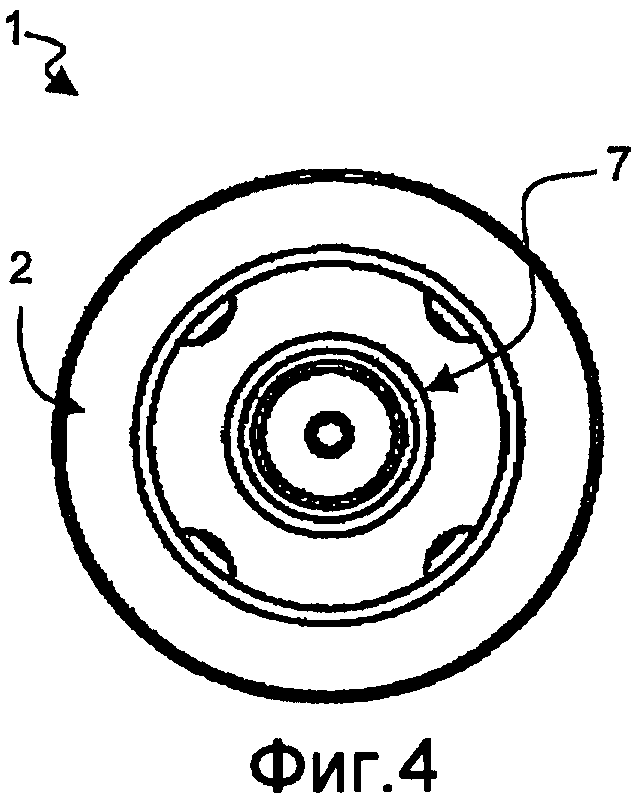
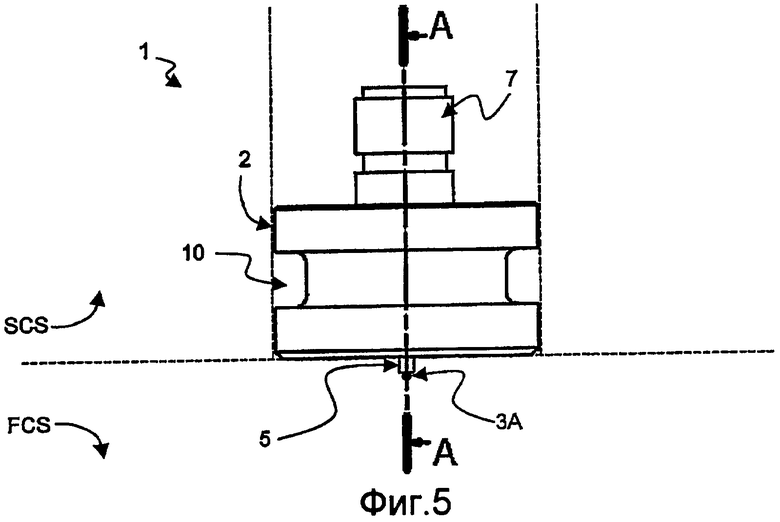
Фиг.1, 2, 3, 4 и 5 являются, соответственно, видами в перспективе снизу и сверху, видами снизу, сверху и сбоку, на которых схематически изображен датчик для измерения плотности и вязкости текучей среды (флюида) согласно первому варианту осуществления изобретения;
Фиг.6.A является видом в разрезе по линии АА фиг.5, на котором изображен датчик для измерения плотности и вязкости текучей среды (флюида) согласно первому варианту осуществления изобретения;
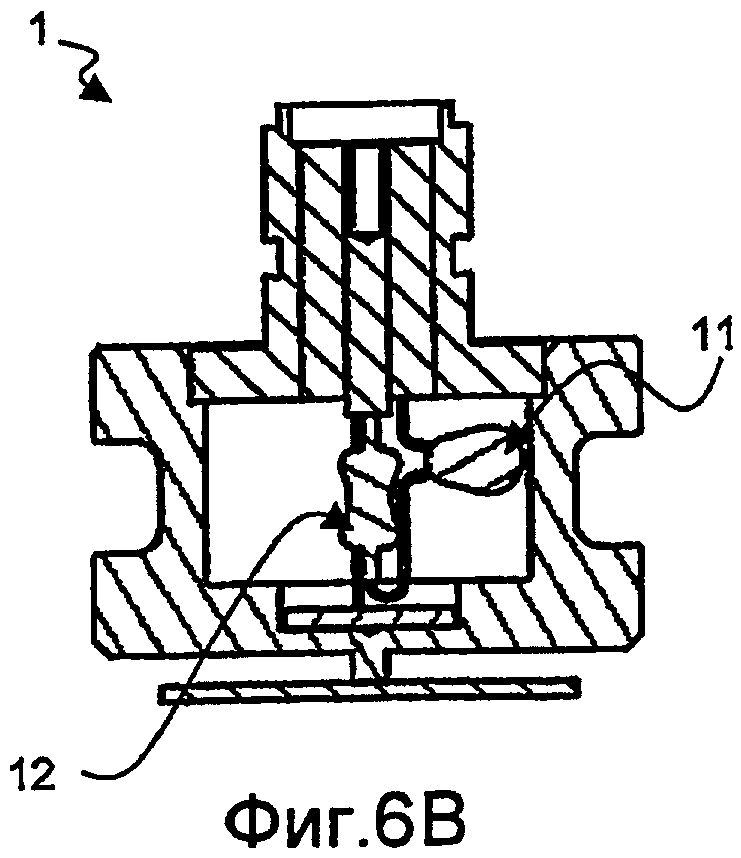
Фиг.6.B является видом в разрезе по линии АА фиг.5, на котором изображен датчик для измерения плотности и вязкости текучей среды (флюида) согласно модификации первого варианта осуществления изобретения;
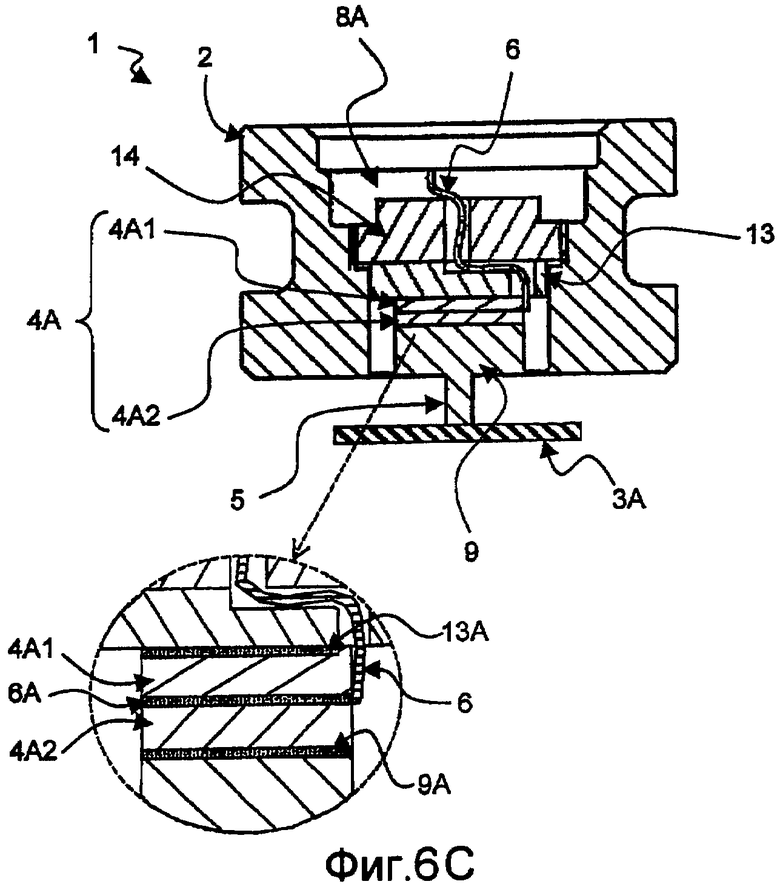
Фиг.6.C является видом в разрезе по линии АА фиг.5, на котором изображен датчик для измерения плотности и вязкости текучей среды (флюида) согласно другой модификации первого варианта осуществления изобретения;
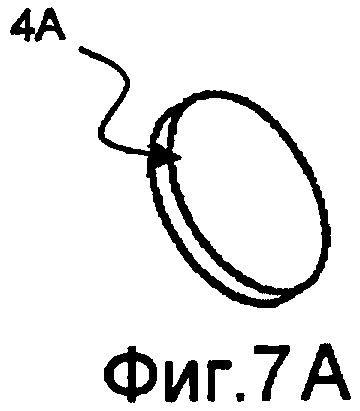
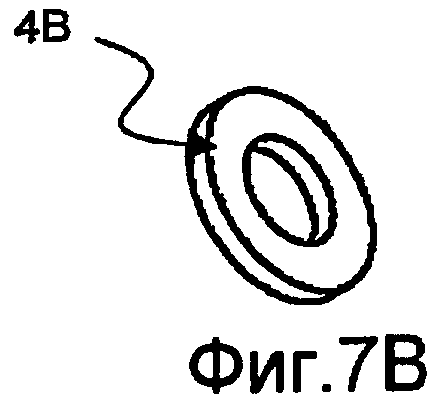
Фиг.7.A и 7.B являются видами в перспективе пьезоэлектрического элемента соответственно согласно первой и второй модификации;
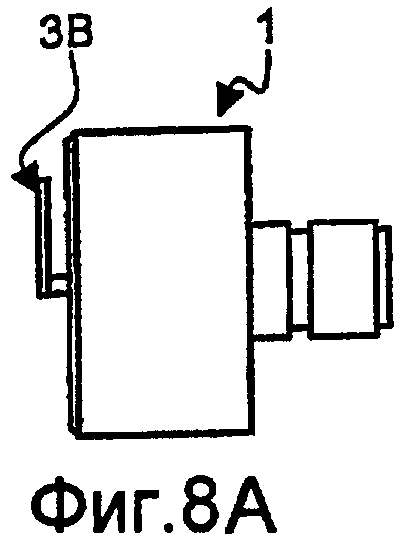
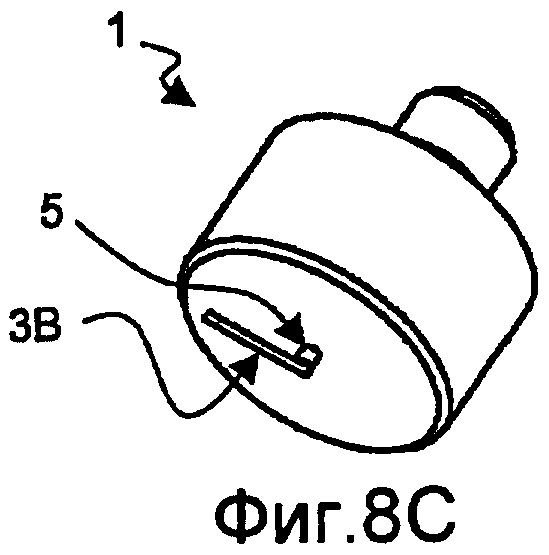
Фиг.8.A, 8.B и 8.C являются соответственно видами сбоку, снизу и снизу в перспективе, на которых схематически изображен датчик для измерения плотности и вязкости текучей среды (флюида) согласно второму варианту осуществления изобретения;
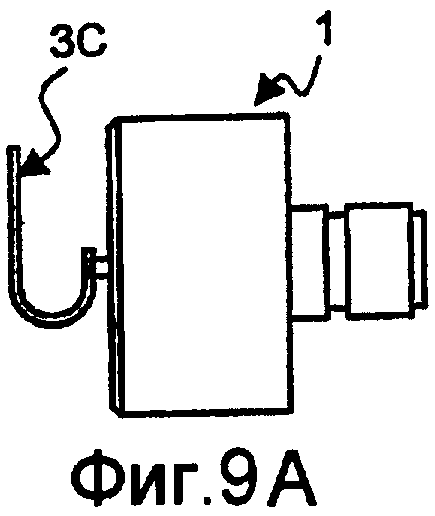
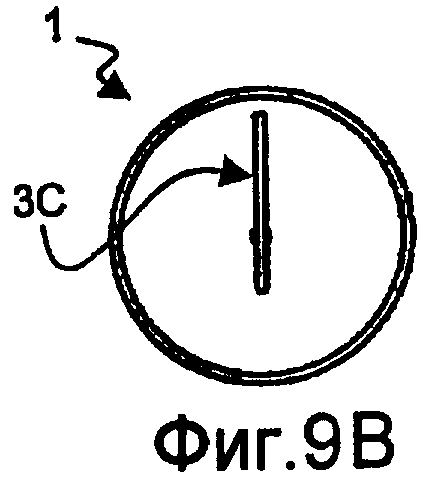
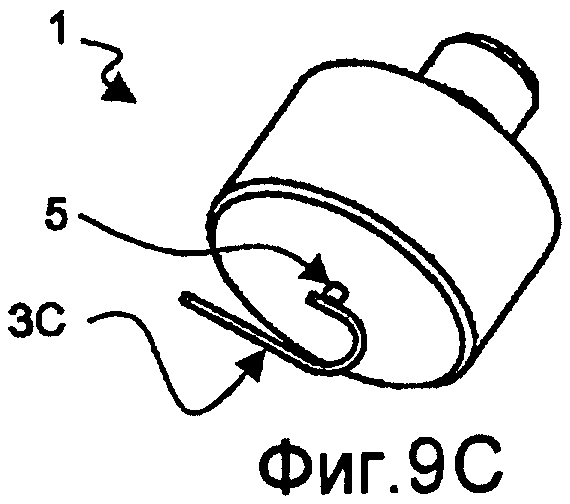
Фиг.9.A, 9.B и 9.C являются соответственно видами сбоку, снизу и перспективными видами снизу, на которых схематически изображен датчик для измерения плотности и вязкости текучей среды (флюида) согласно третьему варианту осуществления изобретения;
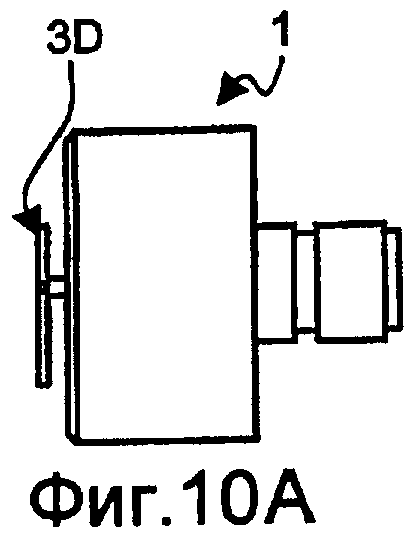
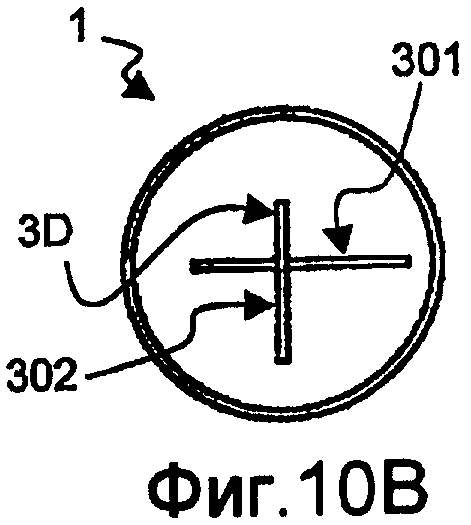
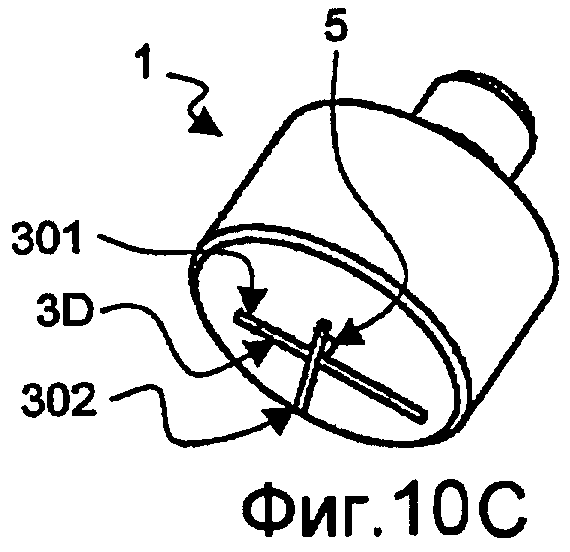
Фиг.10.A, 10.B и 10.C являются соответственно видами сбоку, снизу и перспективными видами снизу, на которых схематически изображен датчик для измерения плотности и вязкости текучей среды (флюида) согласно четвертому варианту осуществления изобретения;
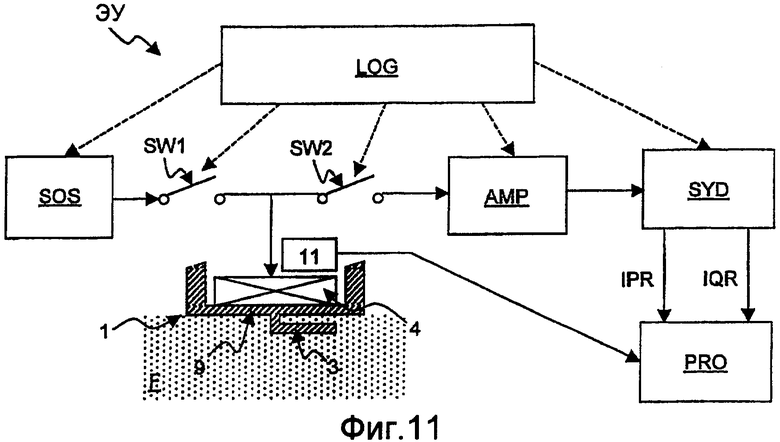
Фиг.11 является схематичной иллюстрацией электронного устройства, связанного с датчиком согласно изобретению;
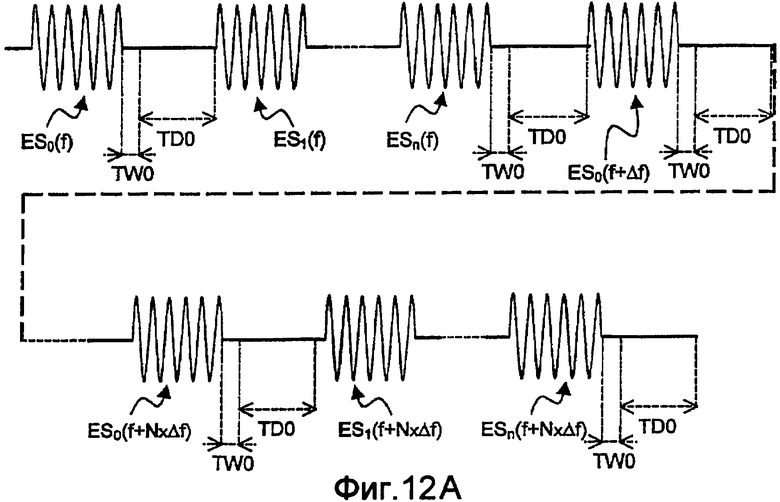
Фиг.12.A и 12.B являются схематическими иллюстрациями схемы возбуждения и обнаружения соответственно по первому варианту и второму варианту осуществления изобретения;
Фиг.13 является видом в разрезе, на котором изображен датчик для измерения плотности и вязкости текучей среды (флюида), помещенный в трубопровод, и поясняется принцип измерения согласно изобретению;
Фиг.14 является схематической иллюстрацией способа измерения плотности и вязкости текучей среды (флюида) согласно изобретению;
на Фиг.15 показаны квадратурный спектр фактического отклика датчика, полученный на основе измерений, и квадратурный спектр модельного отклика, полученный на основе вычислений;
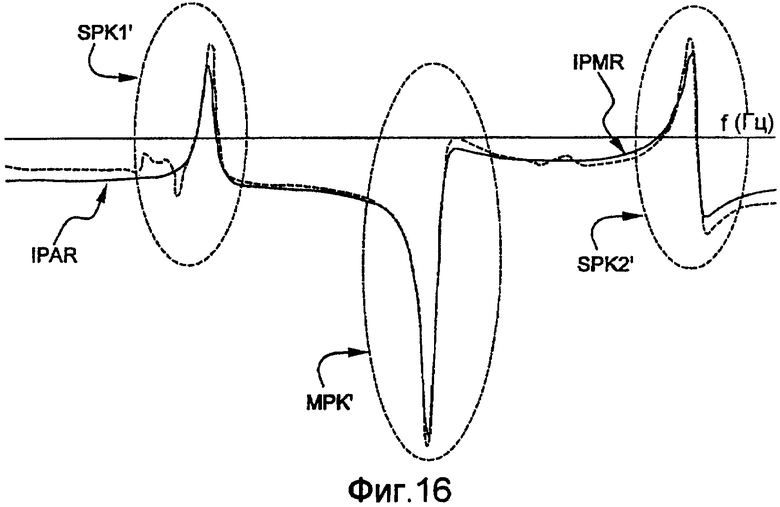
на фиг.16 показаны синфазный спектр фактического отклика датчика, полученный на основе измерений, и синфазный спектр модельного отклика датчика, полученный на основе вычислений;
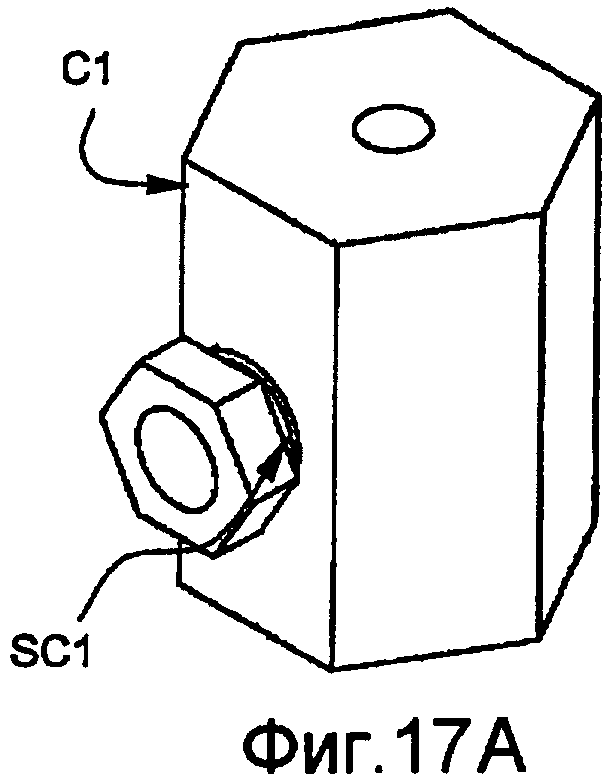
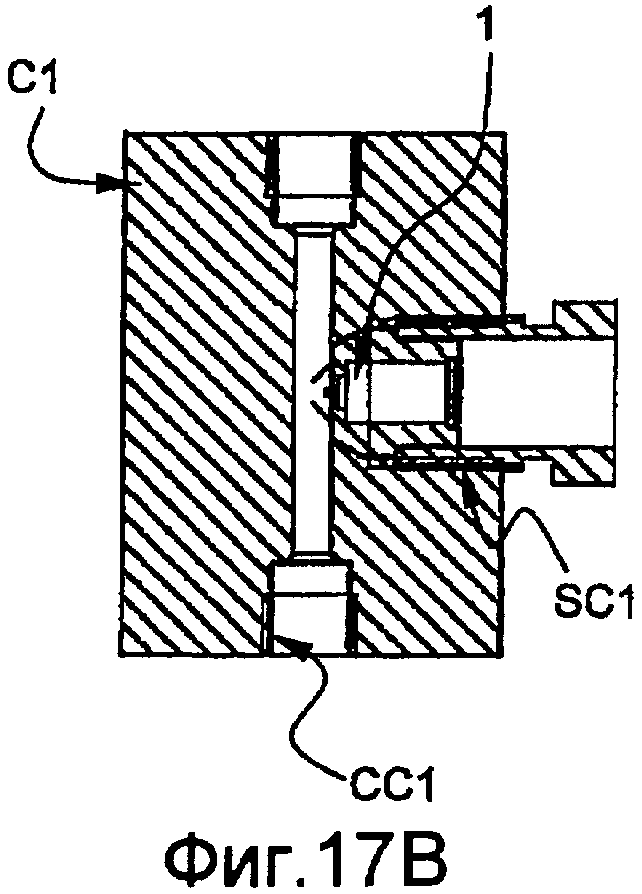
Фиг.17.A и 17.B являются видами в перспективе и в разрезе, на которых схематически изображен датчик для измерения плотности и вязкости текучей среды (флюида), соединенный с трубопроводом по первому варианту осуществления изобретения; и
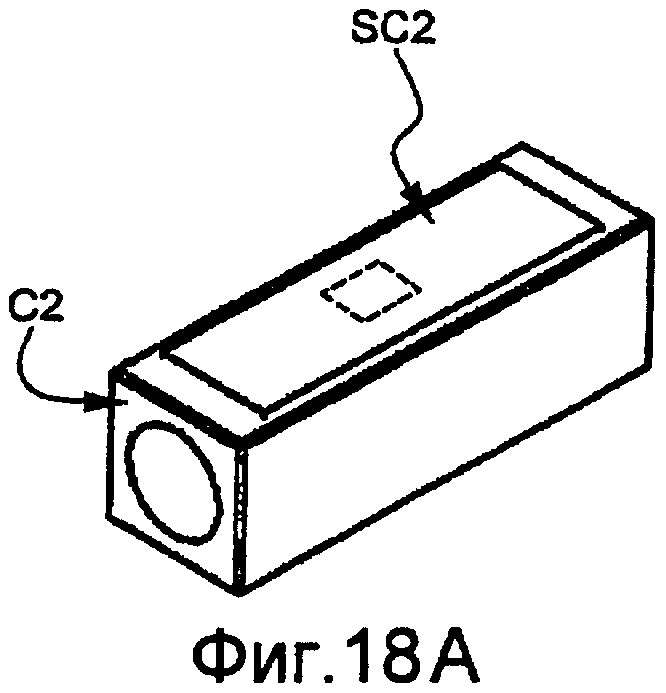
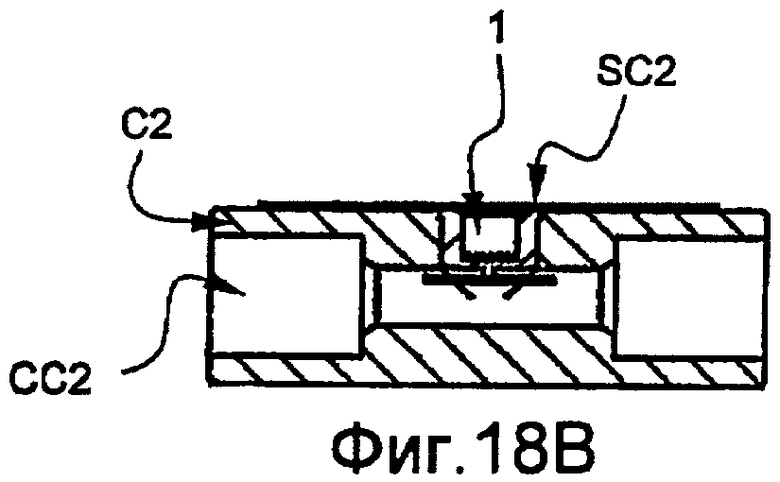
Фиг.18.A и 18.B являются видами в перспективе и в разрезе, на которых схематически изображен датчик для измерения плотности и вязкости текучей среды (флюида), соединенный с трубопроводом по второму варианту осуществления изобретения.
Подробное описание изобретения
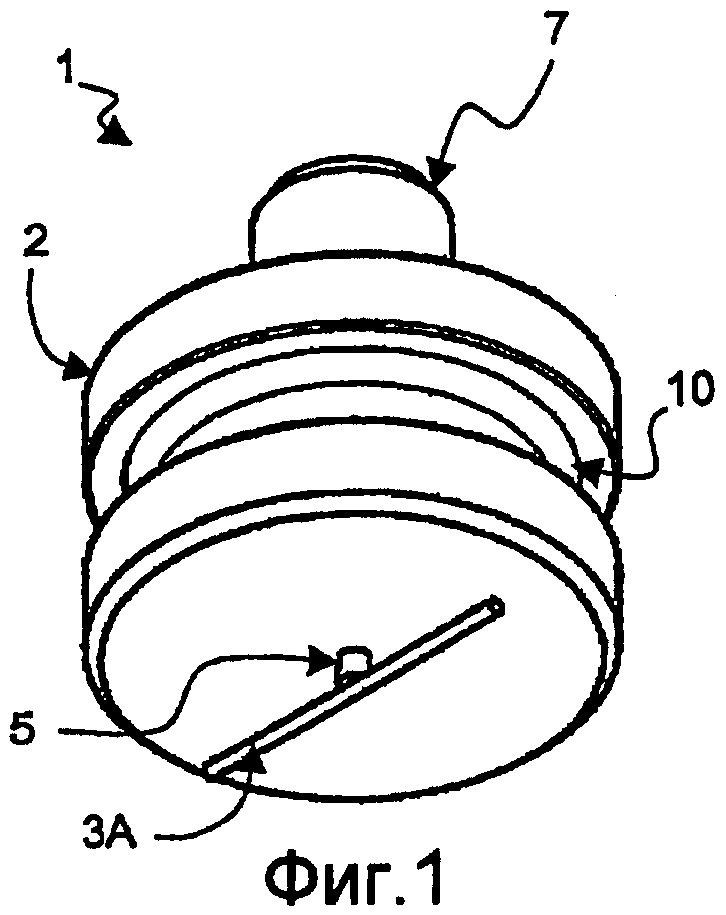
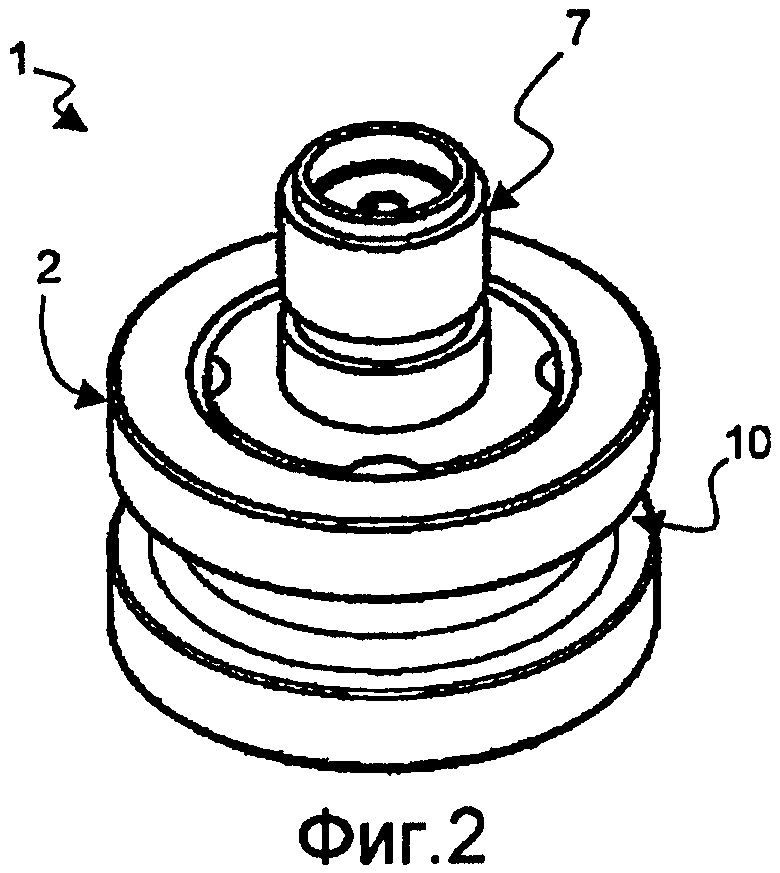
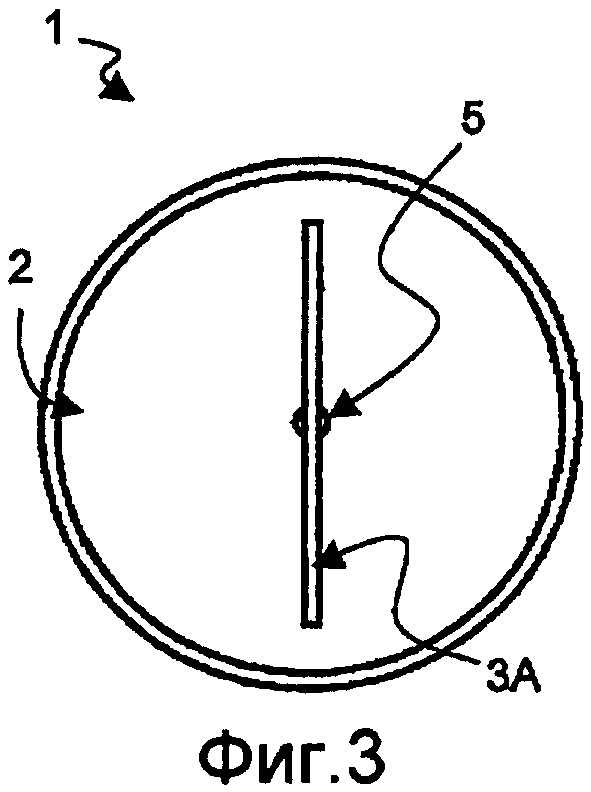
На фиг.1-5 изображен датчик 1 плотности и вязкости согласно изобретению.
Датчик 1 плотности и вязкости содержит корпус 2. Корпус 2 содержит разъем 7, например стандартизированный коаксиальный разъем. Корпус 2 может содержать паз 10 для уплотнительного кольца (не показано). Уплотнительное кольцо отделяет сторону, контактирующую с текучей средой (флюидом) (СКТ), от стороны, соединенной с датчиком (ССД). Сторона, контактирующая с текучей средой (флюидом), может подвергаться воздействию тяжелых условий (высокому давлению, коррозионной текучей среде…(флюиду)). Сторона соединения, как правило, находится под атмосферным давлением. Датчик содержит резонирующий элемент 3A, соединенный с корпусом 2 механическим соединяющим элементом 5. В варианте осуществления изобретения, показанном на фиг.1-6.B, резонирующий элемент 3A имеет вид одинарного коромысла, центр которого прикреплен к корпусу 2 механическим соединяющим элементом 5.
В этом частном варианте осуществления изобретения механический соединяющий элемент 5 составляет единое целое с корпусом. Однако специалисту в данной области техники очевидно, что механический соединяющий элемент 5 может составлять единое целое с резонирующим элементом или может быть дополнительной частью, соединенной с корпусом и резонирующим элементом. Функция механического элемента связи заключается в механическом соединении корпуса 2 с резонирующим элементом 3A, так чтобы через него могло передаваться колебание. Другая функция заключается в том, чтобы поместить резонирующий элемент 3A в измеряемую текучую среду (флюид), так чтобы резонирующий элемент оказался окруженным указанной текучей средой или полностью погружен в указанную текучую среду. Резонирующий элемент 3A и корпус, составляющий или не составляющий единое целое с соединяющим элементом 5, могут быть скомпонованы вместе (например, посредством соответствующей сварки, склеивания, пайки и т.д.).
На фиг.6.A приведен вид в разрезе датчика 1 согласно первой модификации первого варианта осуществления изобретения. Корпус содержит внутреннюю часть корпуса, образующую камеру 8A. Со стороны камеры корпус 2 содержит полость 8B. Полость 8B образует область, где корпус имеет уменьшенную толщину, образуя мембрану 9 между камерой 8A и стороной, контактирующей с текучей средой (флюидом) СКТ. Соединяющий элемент 5 помещается на мембрану 9. Соединяющий элемент 5 предпочтительно помещается в определенный с доступной точностью центр мембраны. Камера 8A может быть заполнена материалом. Материал предпочтительно является веществом, поглощающим колебания (например, газом, нефтью, гелем и т.д.). Вещество, поглощающее колебания, позволяет снизить помехи, возникающие вследствие паразитических мод колебаний самого корпуса. Камера 8A может быть герметизирована через разъем 7.
Исполнительный/обнаруживающий элемент 4, например пьезоэлектрический элемент 4A, помещен в полость 8B. Одна сторона пьезоэлектрического элемента соединена с разъемом 7 соединительным проводом 6. Другая сторона пьезоэлектрического элемента 4A электрически соединена с мембраной 9. В этой модификации пьезоэлектрический элемент преимущественно работает на растяжение.
Как правило, пьезоэлектрический элемент содержит металлический слой по существу на всей своей поверхности и на каждой стороне.
Электрическое соединение может быть обеспечено либо посредством приклеивания пьезоэлектрического элемента к мембране проводящим клеем, либо посредством механического прикрепления пьезоэлектрического элемента к мембране, либо посредством припаивания пьезоэлектрического элемента к мембране.
Разъем 7 содержит внешнюю металлическую часть 7A, контактирующую с корпусом 2, и внутреннюю металлическую часть 7B. Внешняя 7A и внутренняя 7B металлические части разделены изолирующей частью 7C. Таким образом, на пьезоэлектрический элемент 4 может быть подано возбуждение посредством соответствующего электрического сигнала, поданного между двумя его сторонами, а именно, с одной стороны, к внешней металлической части 7A и корпусу 2, а с другой стороны, к металлической части 7B и соединительному проводу 6.
На фиг.6.B изображен вид в разрезе датчика 1 согласно второй модификации первого варианта осуществления изобретения. Согласно этой модификации в камеру 8A корпуса помещается терморезистор 11. Терморезистор позволяет измерять температуру в том месте, где выполняется измерение вязкости и плотности. Кроме того, терморезистор 11 может быть дополнительно соединен с резистором 12 для приведения диапазона измерения температуры в соответствие с конкретным применением, для которого предполагается использовать датчик плотности и вязкости. Измерения температуры могут использоваться для компенсации температурных эффектов, влияющих на измерения плотности и вязкости. Терморезистор приведен в качестве примера, могут применяться и другие устройства для измерения температуры, например, диод.
На фиг.6.C приведен вид в разрезе датчика 1 согласно третьей модификации первого варианта осуществления изобретения. Для большей ясности разъем 7 на фиг.6.C не показан. Согласно этой модификации датчик дополнительно содержит вставку 13 и ввинчивающуюся вставку 14, ввинчиваемую в камеру 8A или полость 8B для обеспечения прижима пьезоэлектрического элемента 4A к мембране 9. Ввинчивающаяся вставка 14 содержит соответствующее отверстие для пропуска соединительного провода 6, расположенное в определенном с доступной степенью точности центре ввинчивающейся вставки. Вставка 13 обеспечивает прижим пьезоэлектрического элемента к мембране при ввинчивании ввинчивающейся вставки 14. Вставка 13 обеспечивает пропуск соединительного провода 6 от центра ввинчивающейся вставки к пьезоэлектрическому элементу. Одна сторона пьезоэлектрического элемента соединяется с разъемом (не показан) соединительным проводом 6. Другая сторона пьезоэлектрического элемента 4A соприкасается с мембраной 9.
Для большей ясности на фиг.6.C также приведена в увеличенном масштабе часть, относящаяся к области пьезоэлектрического элемента 4A. Пьезоэлектрический элемент 4A содержит два наложенных друг на друга пьезоэлектрических элемента 4A1 и 4A2, соединенных друг с другом через первый проводящий слой 6A. Первый соединительный слой 6A соединен с соединительным проводом 6. Первый пьезоэлектрический элемент 4A1 соединен также со вставкой 13 вторым проводящим слоем 13A. Второй пьезоэлектрический элемент 4A2 соединен также с мембраной 9 третьим проводящим слоем 9A. Первый пьезоэлектрический элемент 4A1 имеет обратное поляризационное состояние относительно второго пьезоэлектрического элемента 4A2. В этой модификации пьезоэлектрические элементы преимущественно работают на сжатие. Таким образом, два наложенных друг на друга пьезоэлектрических элемента 4A1 и 4A2 могут возбуждаться соответствующим электрическим сигналом, приложенным между первым проводящим слоем 6A, с одной стороны, и вторым и третьим проводящими слоями 9A, 13A, с другой стороны.
Хотя это не показано на фигурах, может быть изготовлен пакет дополнительных пьезоэлектрических элементов (например, 3, 4, 5, и т.д. пьезоэлектрических элементов) с соответствующей поляризацией и соединениями проводящих слоев. Чем больше число пьезоэлектрических элементов, тем сильнее сигнал, выдаваемый пакетом, что повышает качество измерений, которые можно выполнить при помощи датчика.
Датчик предпочтительно дополнительно содержит любое подходящее средство для прикрепления датчика к трубопроводу, трубе или трубке (фланцевое соединение, винтовое соединение и т.д.) Ниже будут приведены два примера со ссылкой на фиг.17 и 18.
На фиг.7.A и 7.B приведен исполнительный/обнаруживающий элемент в виде пьезоэлектрического элемента. Согласно первому варианту, приведенному на фиг.7.A, пьезоэлектрический элемент имеет простую цилиндрическую форму 4A. Согласно второму варианту, приведенному на фиг.7B, пьезоэлектрический элемент имеет кольцеобразную форму 4B, то есть цилиндрическую форму с полой центральной частью. Пьезоэлектрический элемент, имеющий вторую форму, выдерживает более сильную деформацию по сравнению со второй формой. Таким образом, значительно снижается риск разрыва пьезоэлектрического элемента при значительном напряжении, особенно, при высоком давлении. Напряжение растяжения может привести к разрыву пьезоэлектрического элемента.
На фиг.8.A, 8.B и 8.C приведены соответственно виды сбоку, снизу и снизу в перспективе, на которых схематически изображен датчик 1 плотности и вязкости согласно второму варианту осуществления изобретения.
Согласно этому варианту осуществления резонирующий элемент 3B имеет вид одинарного коромысла, прикрепленного одним концом к соединяющему элементу 5.
На фиг.9.A, 9.B и 9.C приведены соответственно виды сбоку, снизу и снизу в перспективе, на которых изображен датчик 1 плотности и вязкости согласно третьему варианту осуществления изобретения.
Согласно этому варианту осуществления резонирующий элемент 3C имеет вид несимметричного U-образного коромысла. Коромысло может представлять собой проволоку, например, с цилиндрическим или эллиптическим сечением и иметь несколько микрометров в диаметре. Проволока содержит первую продольную часть, контактирующую с измеряемой текучей средой. Проволока содержит вторую изогнутую часть, которая прикреплена одним концом к соединяющему элементу 5.
Коромысло согласно первому, второму и третьему вариантам осуществления предпочтительно ориентировано в направлении потока текучей среды (флюида). Такое взаимное расположение позволяет минимизировать влияние эрозии в текучей среде (флюиде) с высокой скоростью частиц. Оно также позволяет свести к минимуму турбулентность, вызванную наличием измерительного прибора, и, таким образом, шум на коромысле.
На фиг.10.A, 10.B и 10.C приведены соответственно виды сбоку, снизу и снизу в перспективе, на которых схематично изображен датчик 1 плотности и вязкости согласно четвертому варианту осуществления изобретения. Согласно этому варианту осуществления резонирующий элемент 3D содержит первое коромысло 301 и второе коромысло 302. Каждый провод погружен в измеряемую текучую среду (флюид). Первое коромысло 301 прикреплено в одной точке к соединяющему элементу 5. Второе коромысло 302 прикреплено одной своей точкой к первому коромыслу. Первое коромысло может быть расположено под любым углом ко второму коромыслу, предпочтительно под углом 90°. Точка прикрепления первого коромысла может быть выбрана посредине провода, так чтобы получилось симметричное коромысло, или в любой точке провода, так чтобы получилось асимметричное коромысло. То же верно для второго коромысла. Возможно также сочетание симметричного коромысла и асимметричного коромысла.
Каждое коромысло предпочтительно обладает своей добротностью и резонансной частотой. Таким образом, множество коромысел различной длины обеспечивают расширенный диапазон измерений плотности и вязкости (каждое коромысло чувствительно к определенному диапазону плотности и вязкости). Множество коромысел одинаковой длины улучшают отношение сигнал-шум, повышая, таким образом, точность датчика.
В вышеописанных вариантах осуществления изобретения различные коромысла, изображенные на фигурах, содержат проволоку, имеющую круглое сечение. Однако это не является ограничительным условием, поскольку коромысла могут в альтернативном варианте осуществления изобретения содержать любую проволоку с эллиптическим сечением, или с параллелепипедным сечением (например, прямоугольным сечением), или с треугольным сечением и т.д. Диаметр или ширина проволоки может составлять несколько сот микрометров.
Корпус датчика предпочтительно выполнен из высокопрочной и обладающей высокой коррозионной стойкостью нержавеющей стали, например, из сплава «инконель».
Резонирующий элемент предпочтительно выполнен из высокопрочного и обладающего высокой коррозионной стойкостью материала, например, из нержавеющей стали или из материала с низкой плотностью, такого как сапфир или бороуглерод. Применение сапфира или бороуглерода повышает чувствительность к плотности текучей среды (флюида).
В альтернативном варианте осуществления изобретения резонирующий элемент может быть выполнен из специальных материалов, предназначенных для обнаружения или измерения химических образцов в текучей среде (флюиде).
Фиг.11 схематично иллюстрирует электронное устройство ЭУ, связанное датчиком 1 плотности и вязкости согласно изобретению. Электронное устройство может составлять единое целое с датчиком 1 плотности и вязкости посредством их объединения внутри камеры или может быть подсоединено снаружи к разъему 7. Электронное устройство может содержать отдельные электронные элементы или может быть реализовано в виде интегральной схемы.
Электронная схема ЭУ содержит управляющую схему LOG, генератор колебаний SOS, первый ключ SW1, второй ключ SW2, усилитель AMP, схему обнаружения SYS и обрабатывающую схему PRO.
Управляющая схема LOG соединена с генератором колебаний SOS, первым ключом SW1 и вторым ключом SW2, усилителем AMP и схемой обнаружения SYS.
Генератор колебаний SOS может быть генератором качающейся частоты. Генератор выполняет функцию схемы возбуждения и обнаружения датчика, которая более подробно описана ниже (см. фиг.12.A и 12.B).
На первом этапе управляющая схема LOG закрывает первый ключ SW1 и открывает второй ключ SW2. В результате генератор колебаний SOS подает возбуждающий сигнал на пьезоэлектрический элемент 4. В результате подачи возбуждающего сигнала пьезоэлектрический элемент 4 прикладывает механическое напряжение к мембране 9 и резонирующему элементу 3 и снимает его благодаря их взаимному механическому соединению. Возбуждающий сигнал составляет порядка нескольких вольт.
Как только возбуждение пьезоэлектрического элемента 3 вызывает колебания, возбуждение может быть снято, и может быть измерен сигнал приема, характеризующий колебания резонирующего элемента 3 в текучей среде (флюиде) F. Сигнал приема составляет обычно порядка нескольких микроампер.
Соответственно, на втором этапе управляющая схема LOG закрывает второй ключ SW2 и открывает первый ключ SW1. В результате пьезоэлектрический элемент вырабатывает сигнал приема, характеризующий изменение напряжения в мембране 9, механически связанной с резонирующим элементом 3.
Сигнал обнаружения усиливается усилителем AMP. Схема обнаружения SYS выполняет синхронное обнаружение в течение фазы обнаружения. Она подает на обрабатывающую схему PRO фактический синфазный сигнал отклика IPR и фактический квадратурный сигнал отклика IQR, измеренный датчиком 1.
Обрабатывающая схема PRO может быть также соединена с терморезистором 11, который обеспечивает измерение температуры на уровне датчика. Обрабатывающая схема выдает плотность и вязкость текучей среды (флюида) F в соответствии со способом определения плотности и вязкости, который более подробно описан ниже (см. фиг.14).
Следует отметить, что второй ключ SW2 можно убрать или заменить его соответствующим сопротивлением. Основная функция второго ключа SW2 заключается в защите усилителя AMP из-за разности в величине между возбуждающим сигналом и сигналом приема.
Первый вариант схемы возбуждения и обнаружения датчика плотности и вязкости приведен на фиг.12.А. Схема возбуждения и обнаружения основана на чередовании фазы возбуждения, фазы ожидания и фазы обнаружения. На первом этапе, как описано выше, на пьезоэлектрический элемент подается первый возбуждающий сигнал ES0(f). Первый возбуждающий сигнал ES0(f) имеет первую частоту f и содержит некоторое число периодов М (например, четыре периода, шесть периодов и т.д.) Затем на втором этапе, как описано выше, после промежутка времени ожидания TW0 в промежуток времени обнаружения TD0 происходит обнаружение сигнала приема, выработанного пьезоэлектрическим элементом. Промежуток времени ожидания TW0 содержит определенное число периодов L, например L приблизительно равно одному периоду, и дает возможность системе вернуться в исходное состояние до проведения измерения. В промежуток времени обнаружения TD0 измеряется затухающий сигнал (не показан) вследствие гашения колебаний резонирующего элемента в текучей среде (флюиде). Время обнаружения TD0 содержит некоторое число периодов P, например P приблизительно равно трем периодам.
Эти два этапа повторяются n раз от возбуждающего сигнала ES1(f) до возбуждающего сигнала ESn(f). Например, n=10, 50, 100 и т.д.
Предпочтительно, чтобы число n было с доступной степенью точности равно добротности Q резонирующего элемента. Такой выбор позволяет обеспечить стабилизированное колебательное состояние.
Вышеуказанные этапы затем повторяются, так чтобы генератор колебаний SOS обеспечивал возбуждающий сигнал, частота которого проходит диапазон частот, охватывающий резонансную частоту резонирующего элемента. Точнее, вышеуказанные этапы повторяются со вторым возбуждающим сигналом ES0(f+Δf). Второй возбуждающий сигнал ES0(f+Δf) имеет вторую частоту f+Δf, соответствующую первой частоте f, смещенной на шаг приращения частоты Δf. Он содержит такое же число периодов, что и первый возбуждающий сигнал ES0(f). Эти этапы повторяются до тех пор, пока не будет полностью пройден диапазон частот, а именно до тех пор, пока не будет подан сигнал возбуждения ESn(f+N×Δf) и выполнено соответствующее обнаружение. Например, генератор колебаний SOS может проходить частотный диапазон между 8200 Гц и 8300 Гц с шагом приращения частоты 1 Гц и N=100.
В этом варианте схемы возбуждения и обнаружения обнаруженный затухающий сигнал усиливается. Затем схема обнаружения выполняет синхронное обнаружение. Обнаруженный затухающий сигнал умножается соответственно на сигнал синусоидального типа и сигнал косинусоидального типа. Находится среднее по n сигналов для каждой частоты. Умножение на синусоидальный сигнал дает синфазный сигнал отклика. Умножение на косинусоидальный сигнал дает квадратурный сигнал отклика. Типичный полученный спектр подробно описан ниже со ссылкой на фиг.15 и 16.
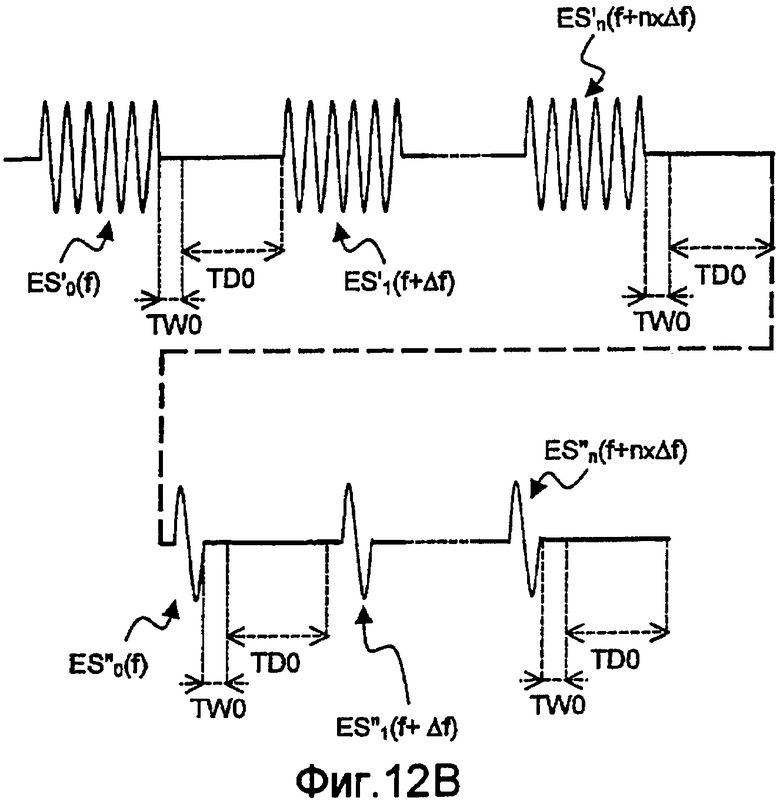
Второй вариант схемы возбуждения и обнаружения датчика плотности и вязкости приведен на фиг.12.B. Схема возбуждения и обнаружения основана на чередовании фазы возбуждения, фазы ожидания и фазы обнаружения. На первом этапе, как описано выше, на пьезоэлектрический элемент подается первый возбуждающий сигнал ES′0(f). Первый возбуждающий сигнал ES'0(f) имеет первую частоту f и содержит некоторое число периодов M', по меньшей мере, два периода (например, четыре периода, шесть периодов и т.д.) Затем на втором этапе, как описано выше, после промежутка времени ожидания TW0 в промежуток времени обнаружения TD0 происходит обнаружение сигнала приема, выработанного пьезоэлектрическим элементом. Промежуток времени ожидания TW0 длится некоторое число периодов L', например L' равно приблизительно одному периоду, и позволяет системе вернуться в исходное состояние перед проведением измерений. В промежуток времени обнаружения TD0 измеряется затухающий сигнал (не показан) вследствие гашения колебаний резонирующего элемента в текучей среде (флюиде). Промежуток времени обнаружения TD0 длится некоторое число периодов P', например P' приблизительно равно трем периодам.
Эти два этапа повторяются n раз от возбуждающего сигнала ES'0(f) до возбуждающего сигнала ESn(f). Например, n=10, 50, 100 и т.д.
Вышеуказанные этапы затем повторяются, так чтобы генератор колебаний SOS подавал возбуждающий сигнал, который проходит диапазон частот, охватывающий резонансную частоту резонирующего элемента. Точнее, вышеуказанные этапы повторяются со вторым возбуждающим сигналом ES'1(f+Δf). Второй возбуждающий сигнал ES'1(f+Δf) имеет вторую частоту f+Δf, соответствующую первой частоте f, смещенной на шаг приращения частоты Δf. Он содержит то же число периодов, что и первый возбуждающий сигнал ES'0(f). Эти этапы повторяются до тех пор, пока не будет полностью пройден диапазон частот, а именно пока не будет подан возбуждающий сигнал ES'n(f+n×Δf) и не будет выполнено соответствующее обнаружение.
Например, генератор колебаний SOS может проходить диапазон частот между 8200 Гц и 8300 Гц с шагом приращения частоты 1 Гц и n=100.
Затем аналогичным образом эти этапы повторяются для других возбуждающих сигналов от ES''0(f) до ES''n(f+n×Δf), так что проходится диапазон частот, охватывающий резонансную частоту резонирующего элемента. Возбуждающий сигнал ES''0(f), ES''0(f+Δf), ES''0(f+2Δf), …, ES''0(f+n×Δf) содержит только один период.
В этом варианте схемы возбуждения и обнаружения обнаруженный затухающий сигнал усиливается. Затем схемой обнаружения выполняется синхронное обнаружение. Обнаруженный затухающий сигнал умножается соответственно на сигнал синусоидального типа и сигнал косинусоидального типа. Умножение на синусоидальный сигнал дает синфазный сигнал отклика. Умножение на косинусоидальный сигнал дает квадратурный сигнал отклика. Для данной частоты синфазный сигнал отклика, полученный из первого возбуждающего сигнала (по меньшей мере, два периода), вычитается из синфазного сигнала отклика, полученного из второго возбуждающего сигнала (только один период). Кроме того, квадратурный отклик, полученный из первого возбуждающего сигнала (по меньшей мере, два периода), вычитается из квадратурного отклика, полученного из второго возбуждающего сигнала (только один период). Таким образом, результаты вычитаний вносят поправку, по меньшей мере, частично, на эффекты, связанные с возвратом датчика в исходное состояние после периода возбуждения и не вполне исчезнувшие после периода ожидания.
Типичный полученный спектр подробно описан ниже со ссылкой на фиг.15 и 16.
Предпочтительно, чтобы в описанных выше первой и второй схемах возбуждения и обнаружения возбуждающий сигнал прекращался в тот момент, когда возбуждающий сигнал равен нулю. Это ускоряет возврат в исходное состояние во время фазы ожидания.
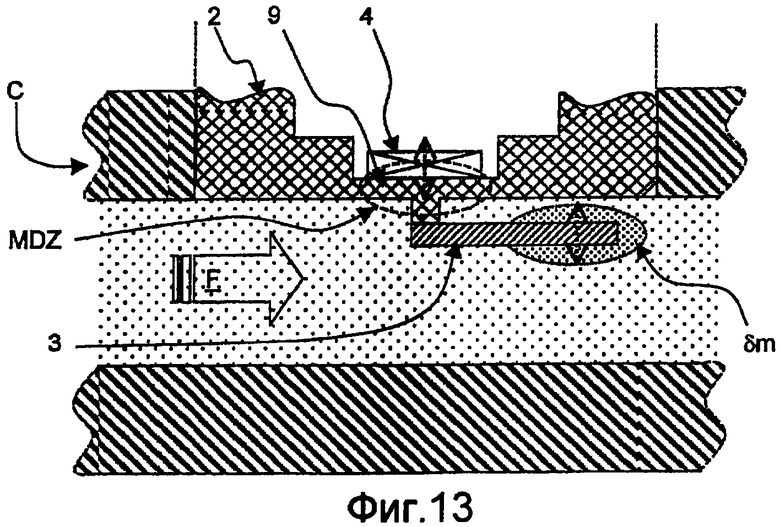
На фиг.13 приведен вид в разрезе, на котором изображен датчик 1 для измерения плотности и вязкости текучей среды (флюида) F, помещенный в трубопровод C, и иллюстрируется принцип измерения согласно изобретению.
Когда резонирующий элемент 3 колеблется в текучей среде (флюиде) F, часть окружающей текучей среды смещается. Эффективная масса резонирующего элемента 3 увеличивается на величину δm, определяемую объемом текучей среды, увлекаемой движущейся частью. Следовательно, этот эффект связан с плотностью жидкости, и получается измеритель плотности.
Поскольку резонирующий элемент 3 колеблется в текучей среде F, резонирующий элемент проходит через текучую среду, испытывающую напряжения сдвига. Следовательно, колебания зависят от сопротивления текучей среды сдвигу, и получается измеритель вязкости.
Возможно с достаточной степенью точности определить точную аналитическую модель взаимодействия резонирующего элемента с текучей средой (например, коромысел первого, второго, третьего и четвертого вариантов осуществления изобретения).
Например, взаимодействие резонирующего элемента согласно второму варианту осуществления изобретения в виде одинарного коромысла, имеющего круговое сечение (фиг.8) в текучей среде может быть с достаточной степенью точно смоделировано.
Во-первых, на основании уравнения Навье-Стокса

где ρ соответствует плотности текучей среды,  представляет силу, возникающую в результате давления P,
представляет силу, возникающую в результате давления P,  соответствует скорости колебания коромысла, η - вязкость текучей среды, а ξ - вторая вязкость текучей среды.
соответствует скорости колебания коромысла, η - вязкость текучей среды, а ξ - вторая вязкость текучей среды.
Во-вторых, на основе истинного допущения, что текучая среда является несжимаемой текучей средой (флюидом), скорость коромысла является низкой, размер коромысла больше амплитуды колебаний резонирующего элемента и добавочная масса δm мала по сравнению с массой коромысла, можно вычислить, что
добавочная масса коромысла определяется формулой δm=πρR2, где R означает радиус участка коромысла.
Добротность находится из выражения
 ,
,
где ρсреды соответствует плотности текучей среды.
Вязкость текучей среды находится из выражения  ,
,
где ω0 связана с резонансной частотой коромысла в текучей среде, ωвак связана с резонансной частотой коромысла в вакууме, а Qвак характеризует потери в вакууме.
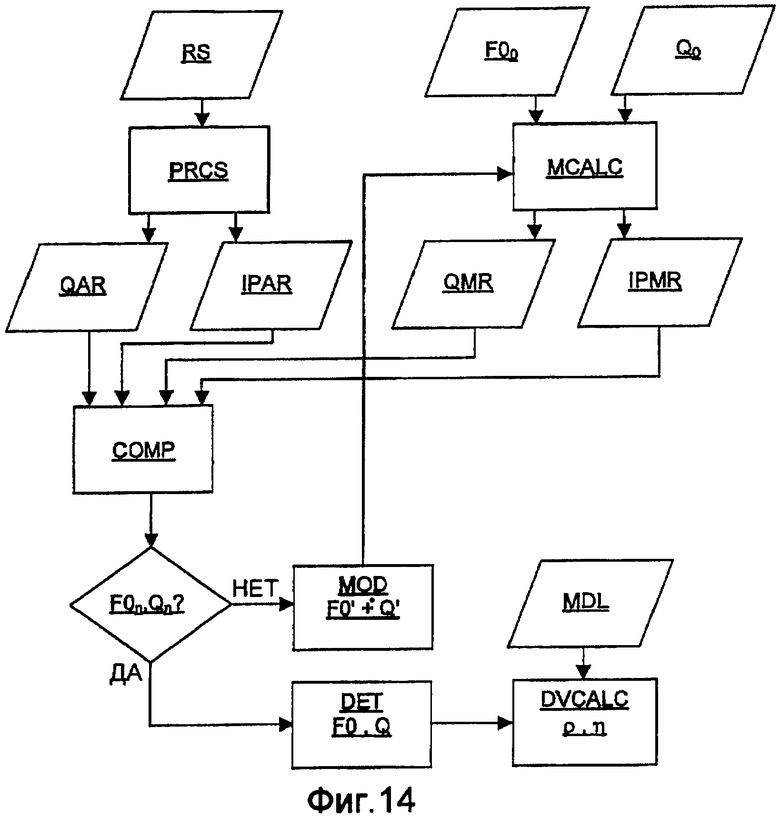
На фиг.14 приведена схема, иллюстрирующая способ измерения плотности и вязкости текучей среды (флюида) согласно изобретению.
На первом этапе возбуждается резонирующий узел, содержащий исполнительный/обнаруживающий элемент 4 и резонирующий элемент 3, 3A, 3B, 3C, 3D, выполненный с возможностью погружения в текучую среду (флюид), в соответствии со схемой возбуждения и обнаружения, описанной выше со ссылкой на фиг.12.A или 12.B.
На втором этапе обнаруживается сигнал приема RS, подаваемый резонирующим устройством. Эти два этапа повторяются на различных частотах, изменяемых таким образом, чтобы был пройден диапазон частот посредством последовательного приращения частоты.
Различные сигналы приема, обнаруженные в диапазоне частот, обрабатываются PRCS, и определяются синфазный спектр фактического отклика датчика (IPAR) и квадратурный спектр фактического отклика датчика (QAR).
Одновременно на основе начальной резонансной частоты F00 и начальной добротности Q0 резонирующего элемента вычисляется MCALC синфазный спектр модельного отклика датчика (IPMR) и квадратурный спектр модельного отклика датчика (QMR). Затем квадратурный спектр модельного отклика датчика (QMR) сравнивается COMP с квадратурным откликом фактического отклика датчика, а синфазный спектр фактического отклика датчика (IPMR) сравнивается COMP с синфазным спектром модельного отклика датчика (IPAR).
Этап вычисления MCALC и этап сравнения COMP повторяются для измененной MOD резонансной частоты F0' и измененной добротности Q', пока не будут достигнуты последние значения резонансной частоты F0n и добротности Qn. Таким образом, проходится некоторое число дискретных значений резонансной частоты F0 и добротности Q, предпочтительно охватывающих значения, которые требуется определить.
Этап сравнения COMP между модельным откликом и фактической реакцией предпочтительно основан на параметрической идентификации. Точнее, для различных резонансных частот и различных добротностей вычисляется некоторое число модельных откликов. Синфазные модельные отклики умножаются поточечно на синфазный фактический отклик, и для каждых модельных откликов вычисляется первый коэффициент взаимной корреляции. Квадратурные модельные отклики умножаются поточечно на квадратурный фактический отклик, и для каждого модельного отклика вычисляется второй коэффициент взаимной корреляции. Вычисление коэффициента взаимной корреляции является известным математическим действием, более подробное объяснение которого здесь не приводится.
Нормированный коэффициент корреляции cc для конкретного значения добротности Q' и конкретного значения резонансной частоты F0' определяется следующей формулой:
 ,
,
где s(fi) - измеренный синфазный спектр для частоты fi, c(fi) - измеренный квадратурный спектр для частоты fi, S(Q',F0',fi) - модельный синфазный спектр для частоты fi, C(Q',F0',fi) - модельный квадратурный спектр для частоты fi, частота fi проходит частотный диапазона, охватывающий резонансную частоту. Для каждой пары резонансная частота/добротность вычисляется нормированный коэффициент корреляции.
Резонансная частота F0 и добротность Q резонирующего элемента в текучей среде (флюиде) считаются определенными DET по той паре резонансная частота/добротность, которая соответствует большей нормированной сумме. Очевидно, точность определения пары резонансная частота/добротность зависит от числа пар, используемых для вычисления модельных откликов, а именно от шага приращения резонансной частоты (например, 0,1 Гц) и от добротности (например, 1 единица).
Для уменьшения числа вычислений при сохранении высокой точности определения резонансной частоты и добротности возможно ограничить вычисление модельных откликов ограниченным потенциальным числом добротностей и большим приращением резонансной частоты (например, 10 Гц). Для поиска наиболее коррелированной пары вычисляется также коэффициент корреляции для соседних пар (например, для 8 пар вокруг наиболее коррелированной пары). Затем выполняется двухмерная интерполяция для определения наилучшей пары резонансная частота/добротность (это известное математическое действие, дальнейшее объяснение которого здесь не приводится).
Возможно также уменьшить число вычислений посредством выборочного сравнения только синфазных откликов или только квадратурных откликов.
Наконец, можно вычислить DVCALC плотность η и вязкость ρ на основе определенной резонансной частоты F0 и полученной добротности Q и на основе осуществленного с достаточной степенью точности аналитического моделирования MDL резонирующего элемента, взаимодействующего с текучей средой (флюидом).
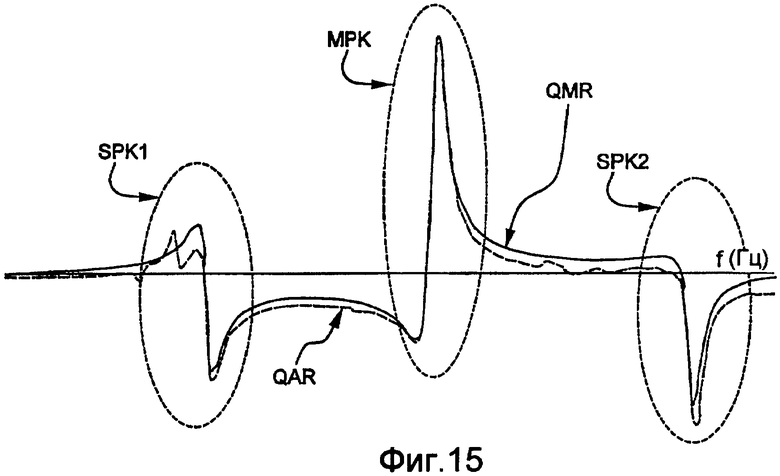
Фиг.15 и 16 иллюстрируют типичный измеренный спектр отклика датчика в сравнении со спектром отклика.
На фиг.15 приведен квадратурный спектр фактического отклика датчика QAR и квадратурный спектр модельного отклика QMR. Эти квадратурные спектры содержат область главного пика диапазона MPK и области первого SPK1 и второго SPK2 боковых пиков диапазона. Различные пики MPK, SPK1, SPK2, MPK', SPK1' и SPK2' вырабатываются прерывистой последовательностью возбуждения исполнительного/обнаруживающего элемента и резонирующего элемента.
На фиг.16 приведен синфазный спектр фактического отклика датчика IPAR и синфазный спектр модельного отклика IPMR. Эти квадратурные спектры содержат область главного пика диапазона MPK' и области первого SPK1' и второго SPK2' боковых пиков диапазона.
Спектры фактического отклика QAR и IPAR основаны на измерениях, выполненных при помощи датчика плотности и вязкости согласно изобретению. Спектры модельного отклика QMR и IPMR основаны на вычислениях. Аппроксимирующая модель включает конкретные характеристики резонирующего элемента датчика плотности и вязкости, с помощью которого проводятся измерения.
На основе определенной резонансной частоты F0 и добротности Q и аппроксимирующей модели для конкретного используемого резонирующего элемента можно вычислить плотность η и вязкость ρ. Плотность и вязкость текучей среды (флюида) предпочтительно может быть дополнительно скорректирована на основе измерений температуры, выполненных, например, терморезистором.
Все вышеприведенные этапы способа измерения предпочтительно выполняются схемой обработки PRO электронного устройства ЭУ.
На фиг.17.A и 17.B приведены виды в перспективе и в разрезе, на которых схематично изображен первый пример датчика 1 плотности и вязкости, соединенный с трубопроводной частью C1 шестигранного сечения. Трубопроводная часть C1 содержит соединительную часть CC1 для соединения с главным трубопроводом или трубой. Датчик 1 плотности и вязкости вставлен в резьбовой корпус SC1. Трубопроводная часть C1 шестигранного сечения содержит резьбовое отверстие для ввинчивания резьбового корпуса SC1. Резьбовое отверстие содержит упор, чтобы при вворачивании резьбового корпуса SC1 резонирующий элемент расположился внутри трубопроводной части C1 оптимальным образом.
На фиг.18.A и 18.B приведены виды в перспективе и в разрезе, на которых схематично изображен первый пример датчика 1 плотности и вязкости, соединенный с трубопроводной частью C2 прямоугольного сечения. Трубопроводная часть C2 содержит соединительную часть CC2 для соединения с главным трубопроводом или трубой. Датчик 1 плотности и вязкости вставлен в приемную часть соединительного корпуса SC2. Соединительный корпус SC2 содержит также пластину. Трубопроводная часть C2 прямоугольного сечения содержит отверстие, куда вставляется приемная часть. Когда соединительный корпус SC2 вставляется в отверстие, пластина упирается во внешнюю часть трубопровода. Таким образом, резонирующий элемент оказывается оптимально расположенным внутри трубопроводной части C1. Соединение пластины с внешней частью трубопровода осуществляется любым подходящим способом сборки.
Заключительные замечания
Был описан исполнительный/обнаруживающий элемент в виде пьезоэлектрического элемента. Однако очевидно, что это лишь пример исполнительного/обнаруживающего элемента и что может применяться любое устройство, преобразующее электрические/механические колебания, например, электродвигатель.
Для специалиста в данной области техники очевидно, что изобретение не ограничено конкретными частными резонирующими элементами, описанными выше. При условии нахождения уравнения, моделирующего поведение резонирующего элемента 3 в текучей среде (флюиде), указанный элемент может иметь иной вид, например, представлять собой сферическую массу на конце коромысла, коромысло, натянутое между двумя ножками вилки и т.д.
Для специалиста в данной области техники также очевидно, что число коромысел, составляющих резонирующий элемент, не равно одному или двум, как описано в четвертом варианте осуществления изобретения. С мембраной может быть соединено множество коромысел, причем каждое коромысло имеет собственную резонансную частоту и тем самым позволяет измерять определенный диапазон плотности и вязкости.
Кроме того, коромысла изображенные на фигурах по существу параллельны области корпуса датчика, контактирующей с измеряемой текучей жидкостью (флюидом). Однако специалисту в данной области техники очевидно, что каждое коромысло может быть расположено относительно области корпуса датчика, контактирующей с измеряемой текучей жидкостью, под любым углом (например, 10°, 30°, 45° и т.д.)
Соединение датчика плотности и вязкости с трубопроводом, по которому протекает измеряемая текучая среда (флюид), не ограничивается двумя описанными выше примерами. Специалисту в данной области техники очевидно, что возможны другие соединения, зависящие от области применения датчика плотности и вязкости.
Кроме того, значение термина «разъем», используемого выше, не ограничивается механическим/электрическим соединением. Специалисту в данной области техники очевидно, что для передачи измерения от датчика к любой системе, которой требуются такие измерения, может применяться беспроводной разъем.
Изобретение находит применение в различных областях промышленности, например, в нефтедобывающей промышленности в качестве датчика плотности и вязкости в скважинном инструменте, в химической промышленности (производство пластмасс, производство косметических препаратов), в пищевой промышленности и т.д. Оно может также применяться в авиации, например, для обнаружения образования льда, например, на крыле самолета, посредством измерения сдвига резонансной частоты из-за дополнительной массы льда на резонирующем элементе.
Вышеприведенные чертежи и их описание являются иллюстрацией, а не ограничением изобретения. Ссылки в формуле изобретения на позиции не должны восприниматься в качестве ограничения формулы. Слово «содержит» не исключает наличия других элементов, помимо перечисленных в пункте формулы. Упоминание элемента в единственном числе не должно исключать наличия множества таких элементов.

Изобретение относится к датчику для измерения плотности и вязкости текучей среды. Датчик основан на использовании механических элементов, вибрирующих в измеряемой текучей среде, и может использоваться для измерения плотности и вязкости в нефтеперерабатывающей, химической, пищевой и т.д. промышленности. Техническим результатом изобретения является упрощение датчика для использования его в пробоотборных камерах или небольших трубах при высоком давлении и высокой температуре. Датчик содержит резонирующий элемент, исполнительный/обнаруживающий элемент, корпус, образующий камеру. Корпус содержит область уменьшенной толщины, образующую мембрану. Исполнительный/обнаруживающий элемент расположен внутри камеры так, чтобы быть изолированным от текучей среды F и механически соединенным с мембраной. Резонирующий элемент, выполненный с возможностью погружения в текучую среду F, механически соединен с мембраной посредством первого коромысла. Мембрана имеет толщину, обеспечивающую передачу механических колебаний между исполнительным/обнаруживающим элементом и резонирующим элементом. Способ измерения плотности и вязкости текущей среды содержит этапы, на которых: подают возбуждающий сигнал на резонирующее устройство; обнаруживают сигнал приема, подаваемый резонирующим устройством; повторяют этап подачи возбуждающего сигнала и этап обнаружения сигнала приема при различных частотах; определяют синфазный фактический отклик датчика и квадратурный фактический отклик датчика на основе сигнала приема, обнаруженного в диапазоне частот. Также способ дополнительно содержит этапы, на которых: вычисляют синфазный модельный отклик датчика и квадратурный модельный отклик датчика; сравнивают синфазный модельный отклик датчика с синфазным фактическим откликом датчика и квадратурный модельный отклик датчика с квадратурным фактическим откликом датчика посредством определения коэффициента сопряженной корреляции; повторяют этап вычисления и этап сравнения при измененной резонансной частоте и измененной добротности и запоминают определенный номер резонансной частоты, добротности и коэффициента сопряженной корреляции; определяют итоговую резонансную частоту и итоговую добротность резонирующего элемента; определяют плотность и вязкость текучей среды на основе итоговой резонансной частоты, итоговой добротности и выполненного с доступной степенью точности аналитического моделирования резонирующего элемента. 2 н. и 13 з.п. ф-лы, 30 ил.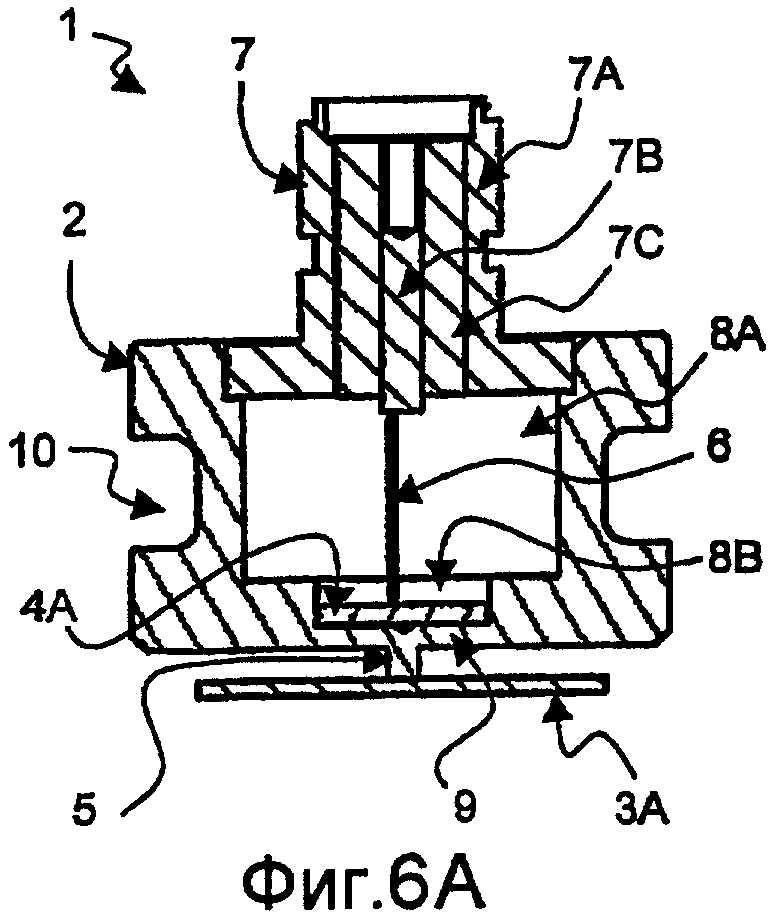
1. Датчик (1) плотности и вязкости для измерения плотности и вязкости текучей среды (F), датчик (1) содержит резонирующий элемент (3, 3А, 3В, 3С, 3D), выполненный с возможностью погружения в текучую среду (F), исполнительный/обнаруживающий элемент (4А, 4В), соединенный с резонирующим элементом, и разъем (7) для соединения с исполнительным/обнаруживающим элементом (4А, 4В), причем:
датчик (1) дополнительно содержит корпус (2), образующий камеру (8А), изолированную от текучей среды (F), корпус (2) содержит область уменьшенной толщины, образующую мембрану (9), отделяющую камеру (8А) от текучей среды (F),
исполнительный/обнаруживающий элемент (4А, 4В) расположен внутри камеры так, чтобы быть изолированным от текучей среды (F) и механически соединенным с мембраной (9),
резонирующий элемент (3, 3А, 3В, 3С, 3D), выполненный с возможностью погружения в текучую среду (F), механически соединен с мембраной (9), и
мембрана (9) имеет толщину, обеспечивающую передачу механических колебаний между исполнительным/обнаруживающим элементом (4А, 4В) и резонирующим элементом (3, 3А, 3В, 3С, 3D), отличающийся тем, что резонирующий элемент (3, 3А, 3В, 3С, 3D) содержит первое коромысло, механически соединенное с мембраной (9) механическим соединяющим элементом (5).
2. Датчик плотности и вязкости по п.1, в котором область уменьшенной толщины образует полость (8), в которой закреплен исполнительный/обнаруживающий элемент (4А, 4В).
3. Датчик плотности и вязкости по п.1 или 2, в котором исполнительный/обнаруживающий элемент содержит, по меньшей мере, один пьезоэлектрический элемент (4А, 4В, 4А1. 4А2).
4. Датчик плотности и вязкости по п.3, в котором пьезоэлектрический элемент (4А, 4В) содержит первую и вторую сторону, причем первая сторона соединена с разъемом (7) соединительным проводом (6), а вторая сторона электрически соединена с мембраной (9).
5. Датчик плотности и вязкости по п.3, в котором пьезоэлектрический элемент (4А, 4В) придвинут к мембране (9) через вставочный узел (13, 14), ввинчиваемый в полость (8), причем указанный вставочный узел содержит отверстия для соединения с соединительным проводом (6).
6. Датчик плотности и вязкости по п.1, в котором разъем (7) является коаксиальным разъемом, содержащим внешнюю металлическую часть (7А), контактирующую с корпусом (2), и внутреннюю металлическую часть (7В), соединенную с соединительным проводом (6), причем внешняя (7А) и внутренняя (7В) металлическая часть отделены друг от друга изолирующей частью (7С).
7. Датчик плотности и вязкости по п.1, в котором датчик (1) дополнительно содержит терморезистор (11), помещенный внутрь камеры (8А).
8. Датчик плотности и вязкости по п.1, в котором датчик (1) дополнительно содержит электронное устройство (ЭУ) для перевода исполнительного/обнаруживающего элемента (4А, 4В) из исполнительного режима в режим обнаружения и обратно.
9. Датчик плотности и вязкости по п.1, в котором резонирующий элемент (3) дополнительно содержит, по меньшей мере, второе коромысло (302), причем первое коромысло измеряет первый диапазон плотности и вязкости, а второе коромысло измеряет второй диапазона плотности и вязкости.
10. Датчик плотности и вязкости по п.1, в котором резонирующий элемент (3) выбран из группы резонирующих элементов, включающей:
одинарное коромысло (3А), прикрепленное к соединяющему элементу (5) своим центром, определенным с доступной степенью точности;
одинарное коромысло (3В), прикрепленное одним концом к соединяющему элементу (5),
U-образное коромысло (3С), содержащее первую продольную часть, соединенную со второй изогнутой частью, прикрепленной одним концом к соединяющему элементу (5), и
двойное коромысло (3D), содержащее первое коромысло и второе коромысло, прикрепленные друг к другу, причем первое коромысло прикреплено к соединяющему элементу (5).
11. Датчик плотности и вязкости по п.1 или 10, в котором коромысло (3А, 3В, 3С, 3D) содержит, по меньшей мере, проволоку, ориентированную в направлении потока текучей среды.
12. Способ измерения плотности и вязкости текущей среды, содержащий этапы, на которых:
a) подают возбуждающий сигнал (ES) на резонирующее устройство, содержащее исполнительный/обнаруживающий элемент и резонирующий элемент (3, 3А, 3В, 3С, 3D), выполненный с возможностью погружения в текучую среду (F), причем возбуждающий сигнал имеет первую частоту (f),
b) обнаруживают сигнал приема (RS), подаваемый резонирующим устройством (4А, 4В),
c) повторяют этап подачи возбуждающего сигнала и этап обнаружения сигнала приема при различных частотах, так чтобы был пройден диапазон частоты в соответствии с шагом приращения частоты (Δf),
d) определяют (PRCS) синфазный фактический отклик датчика (IPAR) и квадратурный фактический отклик датчика (QAR) на основе сигнала приема, обнаруженного в диапазоне частот, при этом способ дополнительно содержит этапы, на которых:
e) вычисляют (MCALC) синфазный модельный отклик датчика (IPMR) и квадратурный модельный отклик датчика (QMR) на основе начальной резонансной частоты (FO0) и начальной добротности (Q0) резонирующего элемента (3, 3А, 3В, 3С, 3D),
f) сравнивают (СОМР) синфазный модельный отклик датчика (IPMR) с синфазным фактическим откликом датчика (IPAR) и квадратурный модельный отклик датчика (QMR) с квадратурным фактическим откликом датчика (QAR) посредством определения коэффициента сопряженной корреляции,
g) повторяют этап вычисления и этап сравнения при измененной резонансной частоте (FO') и измененной добротности (Q') и запоминают определенный номер (n) резонансной частоты, добротности и коэффициента сопряженной корреляции,
h) определяют итоговую резонансную частоту (FO) и итоговую добротность (Q) резонирующего элемента (3, 3А 3В 3С 3D) в текучей среде (F) на основе определенного номера (n) коэффициента сопряженной корреляции, и
i) определяют плотность и вязкость текучей среды (F) на основе итоговой резонансной частоты (FO), итоговой добротности (Q) и выполненного с доступной степенью точности аналитического моделирования (MDL) резонирующего элемента (3, 3А, 3В, 3С, 3D).
13. Способ измерения плотности и вязкости по п.12, в котором этапы сравнения и определения резонансной частоты/добротности основаны на параметрической идентификации, состоящей в том, что:
вычисляют сумму нормированных коэффициентов корреляции для каждого модельного отклика датчика, вычисленную для определенного номера (n) резонансных частот и добротности резонирующего элемента, и
определяют итоговую резонансную частоту и итоговую добротность, соответствующие паре резонансная частота/добротность, которая связана с наибольшей суммой нормированных коэффициентов корреляции.
14. Способ измерения плотности и вязкости по любому из пп.12 или 13, в котором:
возбуждающий сигнал (ES), имеющий определенную частоту (f, f+Δf, …, f+N×Δf), повторяется некоторое число раз (n), и
синфазный фактический отклик датчика (IPAR) и квадратурный фактический отклик датчика (QAR) определяются (PRCS) на основании среднего значения сигналов приема для каждой частоты, обнаруженных в диапазоне частот.
15. Способ измерения плотности и вязкости по любому из пп.12-13, в котором:
возбуждающий сигнал (ES) содержит первый возбуждающий сигнал и второй возбуждающий сигнал, причем первый возбуждающий сигнал имеет первое число периодов, а второй возбуждающий сигнал имеет второе число периодов, при этом указанные возбуждающие сигналы повторяются на различных частотах так, чтобы был пройден диапазон частот в соответствии с шагом приращения частоты Δf, причем первый сигнал приема связан с первым возбуждающим сигналом, а второй сигнал приема связан со вторым возбуждающим сигналом,
синфазный фактический отклик датчика (IPAR) определяется (PRCS) на основе вычисления разности между синфазным фактическим откликом датчика, связанным с первым сигналом приема, и синфазным фактическим откликом датчика, связанным со вторым сигналом приема, и
квадратурный фактический отклик датчика (QAR) определяется (PRCS) на основе вычисления разности между квадратурным фактическим откликом датчика, связанным с первым сигналом приема, и квадратурным фактическим откликом датчика, связанным со вторым сигналом приема.
| US 5323638 А, 28.06.1994 | |||
| СПОСОБ СПИРТОВАНИЯ ПРОДУКТОВ | 0 |
|
SU282251A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СВОЙСТВ ТЕКУЧИХ СРЕД | 1992 |
|
RU2061218C1 |
| Микрофонно-телефонный усилитель | 1927 |
|
SU6903A1 |

