ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе сканирования X-КТ и, более конкретно, к системе сканирования Х-КТ с детектором, смещенным от центра.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Компьютерная томография (КТ) широко используется для медицинского диагноза и неразрушающих испытаний в промышленности. В различных системах компьютерной томографии в основном используются системы Х-КТ с веерным пучком лучей и с коническим пучком. В существующих системах сканирования Х-КТ используется круговой режим сканирования по орбите и линейный матричный детектор (соответствующий веерному пучку Х-КТ) или плоский матричный детектор (соответствующий коническому пучку Х-КТ), поскольку круговой режим сканирования по орбите требует только простой и легко осуществимой механической конструкции, и был разработан и соответствующий надежный алгоритм реконструкции изображения. Кроме того, детекторы размещены симметрично относительно соединительной линии от источника рентгеновских лучей к оси вращения или слегка отклонены в случае подвижного детектора. В частности, система Х-КТ, основанная на режиме кругового сканирования в настоящее время, играет важную роль в области промышленного неразрушающего контроля.
Среди алгоритмов реконструкции КТ кругового пучка или конического пучка широко используется фильтрованный алгоритм обратной проекции (FBP), который имеет определенные преимущества, такие как простое математическое уравнение, быстрое вычисление, легкая реализация и т.д. Например, известный алгоритм FDK является алгоритмом FBP. Однако обычный алгоритм FBP требует, чтобы проекционные данные не могли быть усечены в направлении детектора, что означает, что детектор должен быть достаточно длинным в поперечном направлении, чтобы охватить все поперечное сечение объекта. Следовательно, когда измеряемый объект имеет большой объем, рентгеновские лучи должен иметь большой угол распространения, и сам детектор должен быть большого размера, чтобы полностью охватить объект. Эти требования трудно выполнить в некоторых областях применения.
Когда должен быть измерен объект большого поперечного сечения, нужно использовать один практический режим сканирования второго поколения, включающий вращение плюс сдвиг. В частности, во-первых, весь объект охватывается несколькими сеансами сканирования, и затем все проекционные данные получаются методом повторного суммирования. Однако режим сканирования занимает много времени и требует больших усилий, что в значительной степени увеличивает аппаратную сложность и настройку системы, при этом количество данных удваивается, и объем вычислений также увеличивается, снижая, таким образом, скорость реконструкции.
Согласно принципу сканирования КТ и теории реконструкции, в случае кругового орбитального сканирования, математическая реконструкция всего объекта не требует всех проекционных данных, которые покрывают целый объект на 360 градусов. В принципе проекционные данные наполовину избыточны, т.е. половина проекционных данных является избыточной. Следовательно, необходима только половина проекционных данных, чтобы точно реконструировать томографические изображения всего объекта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является преодоление вышеупомянутых недостатков известных систем и обеспечение система сканирования Х-КТ, которая имеет простую конструкцию и низкую стоимость, и может уменьшить количество проекционных данных для сканирования и объем вычислений для реконструкции изображения.
Другой целью изобретения является создание системы сканирования Х-КТ, которая содержит основание, поворотную опору объекта, размещенную на указанном основании и предназначенную для размещения на ней проверяемого объекта, рентгеновский аппарат и систему сбора данных, которые расположены на двух сторонах основания, причем одна сторона детектора выровнена по линии или находится вне соединительной линии между источником рентгеновских лучей рентгеновского аппарата и центром поворотной опоры объекта, причем длина внешней части меньше радиуса поля изображения.
Предпочтительно, одна сторона детектора выровнена по соединительной линии между источником рентгеновских лучей рентгеновского аппарата и центром поворотной опоры или вне последнего на 1% радиуса поля изображения.
Предпочтительно использовать линейный матричный детектор, матричный детектор кривых, плоский матричный детектор или изогнутый плоский матричный детектор.
Предпочтительно, чтобы рентгеновский аппарат содержал бы рентгеновскую трубку, ускоритель рентгеновских лучей или источник радиации.
В системе сканирования Х-КТ по настоящему изобретению детектор и источник рентгеновских лучей рентгеновского аппарата смещены от центра поворотной опоры, что может решить проблему реконструкции КТ по проекционным данным поперечного сечения, включая проблему КТ веерного пучка и КТ конического луча. Когда используется система Х-КТ согласно изобретению, подлежащий контролю объект располагается в центре поворотной опоры. Все томографические изображения объекта могут быть реконструированы по проекционным данным рентгеновских лучей, которые покрывают только половину поперечного сечения реконструируемого объекта. По сравнению с обычной системой сканирования Х-КТ в настоящей системе может быть пропущена почти половина детектора, и, таким образом, система сканирования Х-КТ упрощается, и количество проекционных данных на единицу сканирования и вычисления для реконструкции изображения уменьшается при условии, что обеспечено качество реконструированного изображения. При этом аппаратная стоимость системы может быть значительно снижена.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутые преимущества и особенности настоящего изобретения будут очевидны при чтении последующего подробного описания предпочтительных вариантов воплощения изобретения со ссылками на сопровождающие чертежи, на которых:
Фигура 1 - блок-схема системы сканирования Х-КТ согласно изобретению;
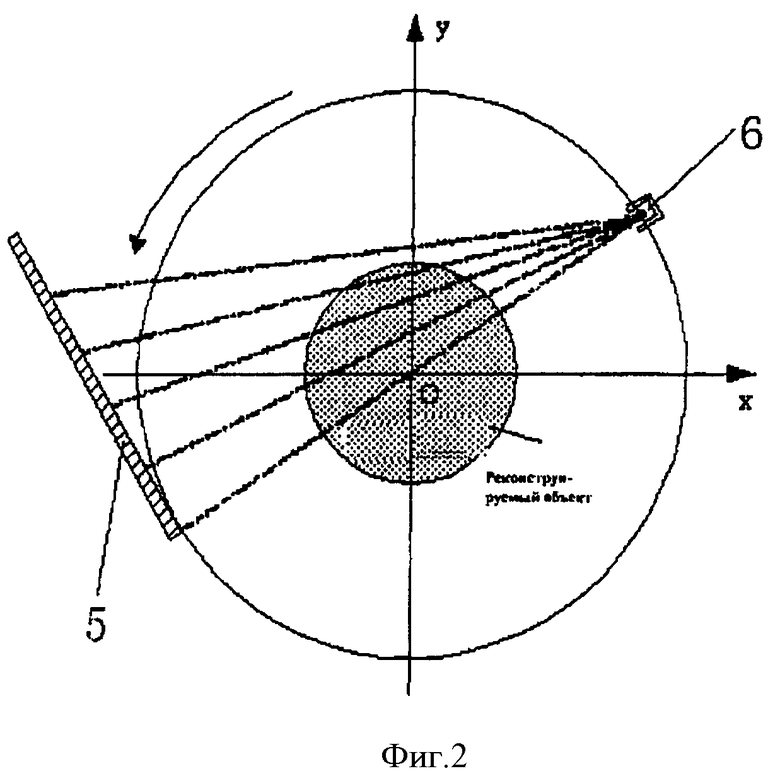
Фигура 2 - схема, иллюстрирующая режим сканирования рентгеновскими лучами в виде конического пучка с детектором, расположенным сбоку согласно одному варианту воплощения изобретения;
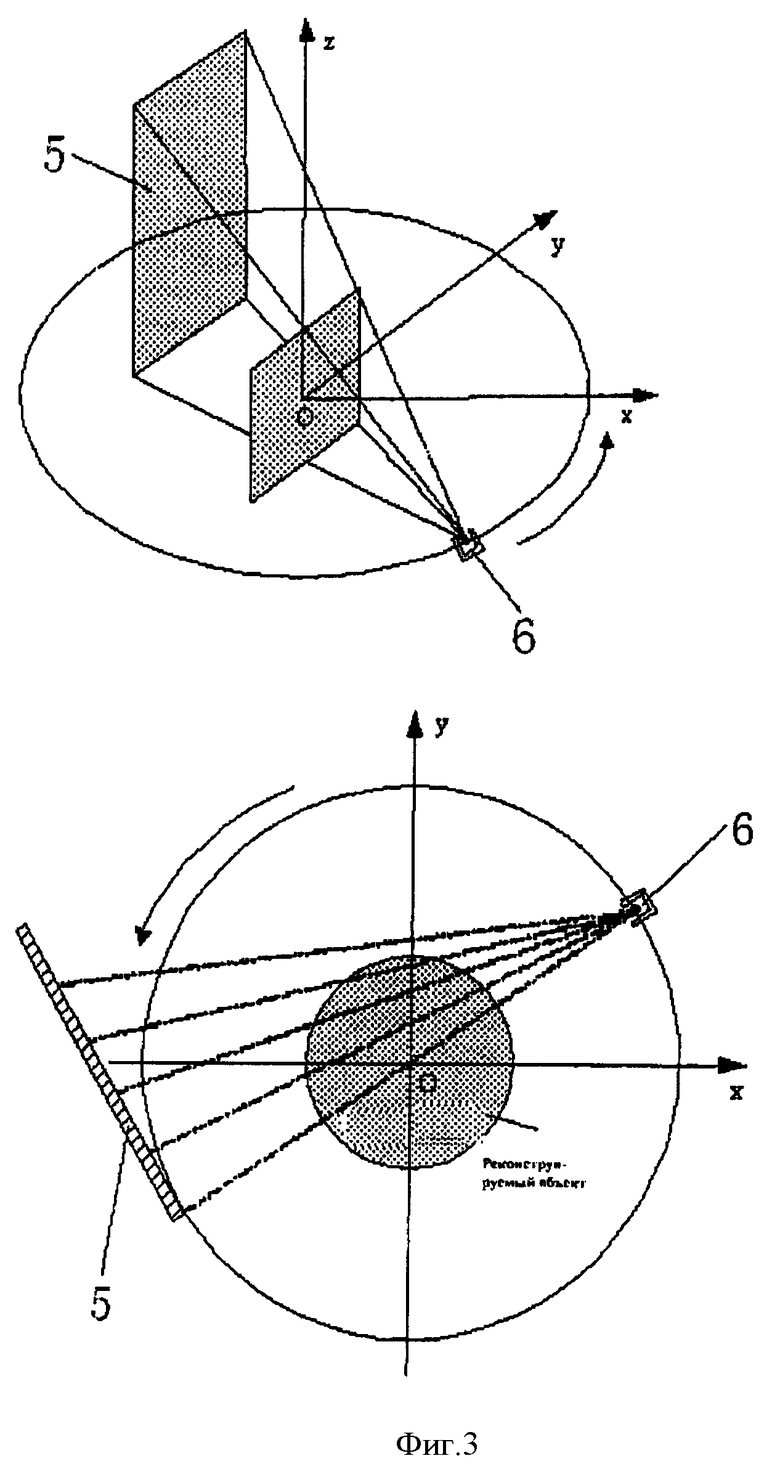
Фигура 3 - схема, иллюстрирующая режим сканирования коническим пучком с внутренне усеченным детектором согласно воплощению изобретения;
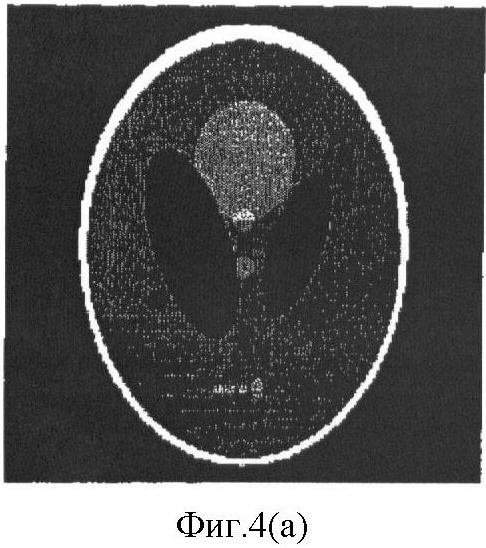
Фигура 4(а) представляет собой изображение, реконструированное с использованием данных сканирования с детектора конического пучка в эксперименте моделирования с головкой Шепп-Логана;
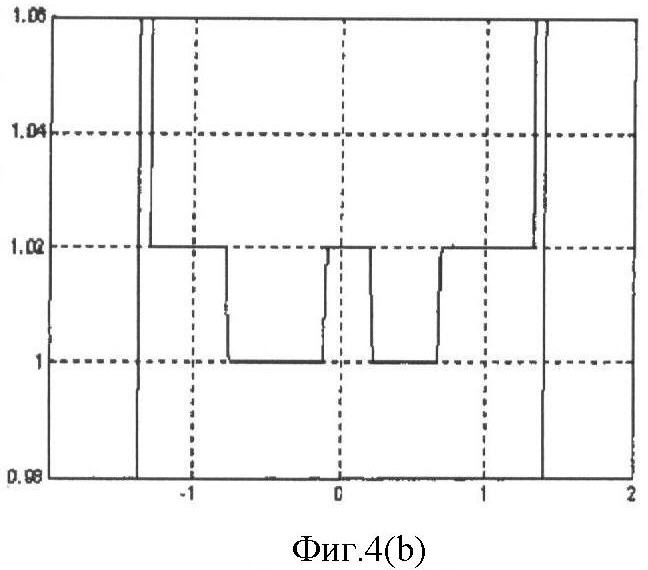
Фигура 4(b) - профиль средней линии изображения фигуры 4(а);
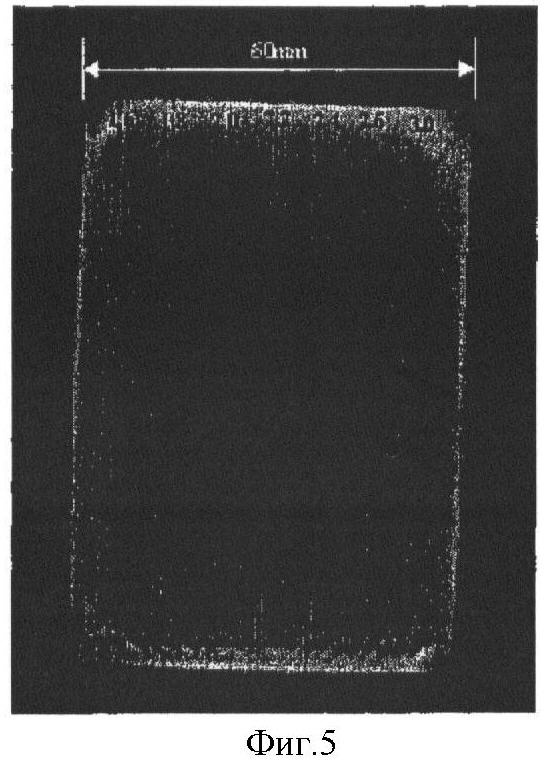
Фигура 5 - полученное изображение, реконструированное по данным эксперимента, полученное с помощью двухпроводной карты на 450 кэВ системы КТ с коническим пучком.
Цифровые позиции на чертежах:
1 рентгеновский аппарат
2 поворотная опора объекта и механическое управляющее устройство этой опоры
3 главный компьютер системы управления и обработки данных
4 основание
5 детектор
6 источник рентгеновских лучей
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее следует подробное описание вариантов воплощения настоящего изобретения, примеры которого иллюстрированы на сопровождающих чертежах, на которых аналогичные элементы обозначены одинаковыми цифровыми позициями. Подробное описание известных функций и конструкций не приводится для ясности и простоты изложения с упором на предмет изобретения. Следует отметить, что приведенное описание дается только для того, чтобы иллюстрировать изобретение, а не для ограничения объема изобретения.
Фигура 1 - блок-схема системы сканирования Х-КТ согласно одному варианту воплощения изобретения.
Как показано на фигуре 1, система сканирования Х-КТ согласно воплощению изобретения содержит главный компьютер системы управления и обработки данных 3, основание 4, поворотную опору объекта и механическое управляющее устройство 2, расположенное в центре основания 4 и служащее для перемещения подлежащего контролю объекта, рентгеновский аппарат 1 и систему сбора данных по двум сторонам основания 4. Система сбора данных содержит плоский матричный детектор 5, канал считывания и модуль управляющей логики для обнаружения проекционных данных рентгеновских лучей и передачи проекционных данных детектору. Главный компьютер 3 системы управления и обработки данных обеспечивает управление во время работы системы Х-КТ и также обрабатывает проекционные данные, полученные системой сбора данных, чтобы реконструировать трехмерное изображение всего объекта и отобразить это на дисплее. Одна сторона плоского матричного детектора 5 выровнена по соединительной линии между источником рентгеновских лучей 6 рентгеновского аппарата 1 и центром поворотной опоры объекта. Иными словами, плоский матричный детектор 5 смещен по оси с одной стороны. Источник рентгеновских лучей может быть рентгеновской трубкой, ускорителем лучей, радиационным источником или источником изотопов в зависимости от размера объекта и условий применения. В данном изобретении количество детекторов в системе сбора данных сокращено наполовину по сравнению с известным устройством, и объем проекционных данных, связанных со всей системой сбора данных, сокращен наполовину.
Управление, передача данных и реконструкция изображения в системе компьютерной томографии выполняются вычислительной рабочей станцией. Информация контроля сканированием, информация о положении и проекционные данные передаются через систему сбора данных на вычислительную рабочую станцию, которая создает трехмерное изображение объекта и отображает трехмерное изображение на дисплее. Для точной реконструкции изображения рентгеновская система отображения изображений должна точно измерить или определить следующие параметры: расстояние D от источника рентгеновских лучей до детектора, расстояние R от источника рентгеновских лучей до оси поворотной опоры, положение отображения Р (θ, u, v) на экране создания изображений исходной точки источника рентгеновских лучей, размер пикселя экрана создания изображений и величину поворота поворотной опоры в градусах.
В соответствии с одним вариантом воплощения изобретения в алгоритме реконструкции используется конический пучок по способу ребининга. Во-первых, проекционные данные конического пучка, собранные в области видимости 360 градусов и полученные с выхода детектора, являются измененными проекционными данными параллельного луча при сканировании области видимости 180 градусов. Конечное трехмерное изображение объекта реконструируется через алгоритм вычисления свертки на светопропускающий экран. Конкретная реализация способа ребининга конического пучка заключается в следующем.
(1) Виртуальный детектор размещается на оси вращения поворотной опоры, и полноразмерные проекционные данные сканирования выделенного конического пучка приводятся к конечным проекционным данным параллельного луча по виртуальному детектору в области видимости 180 градусов по уравнениям (1) и (2):


В этих уравнениях Рр (θ, u, v) обозначают измененные проекционные данные параллельных лучей θ έ [0, п],
 обозначают боковые координаты измененных параллельных лучей на виртуальном детекторе, R обозначает расстояние от точки источника рентгеновских лучей до детектора, L обозначает ширину виртуального детектора измененных параллельных лучей,
обозначают боковые координаты измененных параллельных лучей на виртуальном детекторе, R обозначает расстояние от точки источника рентгеновских лучей до детектора, L обозначает ширину виртуального детектора измененных параллельных лучей,
обозначает вертикальную координату измененных параллельных лучей на виртуальном детекторе, H обозначает высоту детектора конического пучка системы КТ, которая является также высотой виртуального детектора измененных параллельных лучей, PF обозначает проекционные данные, полученные детектором конического пучка лучей системы КТ.
Как можно видеть из вышеупомянутых уравнений, от конического пучка параллельных лучей требуются только проекционные данные w>0 или w<0 в области видимости 360 градусов системы КТ, чтобы изменить конечные проекционные данные параллельного луча в области видимости при сканировании на 180 градусов. Таким образом, то, что должно быть получено, представляет собой только проекционные данные на детекторе на одной стороне соединительной линии от точки источника рентгеновских лучей до центра поворотной опоры.
(2) Измененные проекционные данные взвешиваются и фильтруются в зависимости от направления по уравнению (3).

в котором Pp (θ, u, v) обозначают проекционные данные параллельных лучей, преобразованных на стадии (1), h(u) обозначает функцию фильтра, который является фильтром пилообразного сигнала. На практике фильтр пилообразного сигнала обычно заменяется фильтром R-L или S-L. В качестве примера здесь используется фильтр S-L и его дискретная форма

(3) Прошедшие через взвешивающий фильтр проекционные данные параллельных лучей при сканировании на 180 градусов проецируются обратно на экран по уравнению (5), чтобы получить конечное трехмерное изображение объекта. Уравнение для проецирования на трехмерное светопропускающий экран приведено ниже

В этом уравнении (х, у, z) обозначают координату точки изображения трехмерного объекта в декартовой системе координат, и повторная проекция каждой токи соответствует координате u (x9 y9 0) точки на проекционных данных в виртуальном детекторе, и v (x9 y9 z, в) определяется по следующим уравнениям:


Следует отметить, что вышеупомянутые уравнения реконструкции основаны на способе реконструкции сканирования коническим пучком рентгеновских лучей. Однако алгоритм реконструкции сканирования веерным пучком рентгеновских лучей является особым способом реконструкции, в котором члены переменной v в вышеупомянутых уравнениях опущены. Подробное объяснение здесь также опущено.
На фигуре 2 веерный пучок рентгеновских лучей покрывает только половину контролируемого объекта. Эта конструкция аналогична показанной на фигуре 1 и 3, за исключением того, что используется веерный пучок рентгеновских лучей вентилятора и линейный матричный детектор.
В данном варианте воплощения изобретения одна сторона детектора 5 выровнена с удлиненной соединительной линией между источником рентгеновских лучей рентгеновского аппарата 1 и центром поворотной опоры объекта, при этом длина внешней части меньше радиуса поля изображения. Таким образом, детектор в системе сбора данных получает данные о половине площади объекта, чтобы реконструировать изображение объекта. Предпочтительно, чтобы одна сторона детектора 5 была бы выровнена с удлиненной соединительной линией между источником рентгеновских лучей рентгеновского аппарата 1 и центром поворотной опоры объекта или вне последней на 1% радиуса поля изображения.
На фигурах 4(а), 4(b) и 5 показана часть результатов эксперимента. Фигура 4(а) представляет собой изображение, реконструированное по данным сканирования детектором веерных лучей в эксперименте моделирования с головкой Шепп-Логана. Фигура 4(b) - вид в разрезе от средней линии изображения на фигуре 4(а). Фигура 5 - результат эксперимента с алгоритмом, используя проекционные данные 450 кэВ в системе КТ с плоским матричным детектором.
Объектом эксперимента является карта парной линии. Из результата реконструкции можно доказать, что алгоритм может хорошо реконструировать изображение объекта в случае, когда детектор смещен от центра, чтобы достичь реальной цели проекции.
Как описано выше, при сканировании коническим или веерным пучком рентгеновских лучей детектор расположен на одной стороне центральной линии вращения системы и покрывает только половину или несколько больше половины объекта при сканировании. Полное изображение может быть реконструировано по проекционным данным, полученным смещенным от центра детектором сканирования половины объекта.
Кроме того, механическая конструкция системы сканирования Х-КТ в соответствии с вариантами воплощениям изобретения повторяет конструкцию оригинальной системы кругового обзора без специальной модификации, которая требуется при сдвиге детектора, чтобы охватить половину поперечного сечения объекта. Другими словами, по сравнению с традиционной системой сканирования КТ система сканирования согласно изобретению сохраняет половину размера детектора и уменьшает объем проекционных данных при процессе сканирования системой КТ наполовину и в значительной степени снижает стоимость аппаратных средств системы КТ, и понижает дозу облучения рентгеновскими лучами в процессе сканирования. Соответствующий алгоритм реконструкции изображения может использовать проекционные данные со смещенным детектором, чтобы точно реконструировать всю информацию объекта и получить хорошее качество реконструированного изображения.
Вышеупомянутое описание иллюстрирует предпочтительные варианты воплощения настоящего изобретения. Специалисты в данной области техники понимают, что могут быть сделаны различные изменения, замены и модификации в системе по настоящему изобретению, не выходя из объема изобретения. Следовательно, настоящее изобретение ограничено только приведенными ниже пунктами формулы изобретения и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ ПРОСВЕЧИВАНИЯ ИЗЛУЧЕНИЕМ ПОД РАЗНЫМИ УГЛАМИ | 2007 |
|
RU2400735C2 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ, УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И НОСИТЕЛЬ ДАННЫХ | 2018 |
|
RU2709437C1 |
| СИСТЕМЫ СПИРАЛЬНОЙ КТ И СПОСОБЫ РЕКОНСТРУКЦИИ | 2015 |
|
RU2595312C1 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ СПИРАЛЬНОГО СКАНИРОВАНИЯ | 2007 |
|
RU2396551C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЯ, СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ И СРЕДА ДОЛГОВРЕМЕННОГО ХРАНЕНИЯ ИНФОРМАЦИИ | 2011 |
|
RU2510080C2 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ГРУЗОВ | 2007 |
|
RU2386954C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ КОМПЬЮТЕРНЫХ ТОМОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ ГЕОМЕТРИЙ СО СМЕЩЕННЫМ ДЕТЕКТОРОМ | 2010 |
|
RU2550542C2 |
| УСТРОЙСТВО И СПОСОБ ЛУЧЕВОЙ СКАНИРУЮЩЕЙ ВИЗУАЛИЗАЦИИ | 2012 |
|
RU2571170C1 |
| ТОМОГРАФИЧЕСКИЙ АППАРАТ И СПОСОБ РЕКОНСТРУКЦИИ ЕГО ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2015 |
|
RU2655091C2 |
| МЕТОД И СИСТЕМА КОМБИНИРОВАННОГО РАДИАЦИОННОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 2012 |
|
RU2598396C2 |
Изобретение относится к медицинской технике, а именно к рентгеновским компьютерным томографам. Система сканирования томографа содержит основание, поворотную опору объекта, размещенную в основании и служащую для размещения на ней контролируемого объекта, рентгеновский аппарат, систему сбора данных, которые расположены на двух сторонах основания, и детектор. В исходном состоянии одна сторона детектора выровнена с линией, продолжающей соединительную линию между источником рентгеновских лучей рентгеновского аппарата и центром поворотной опоры объекта, или расположена от продолжающей линии на расстоянии, меньшем, чем радиус поля изображений. Использование изобретения позволяет уменьшить количество проекционных данных для сканирования и объем вычислений для реконструкции. 3 з.п. ф-лы, 5 ил.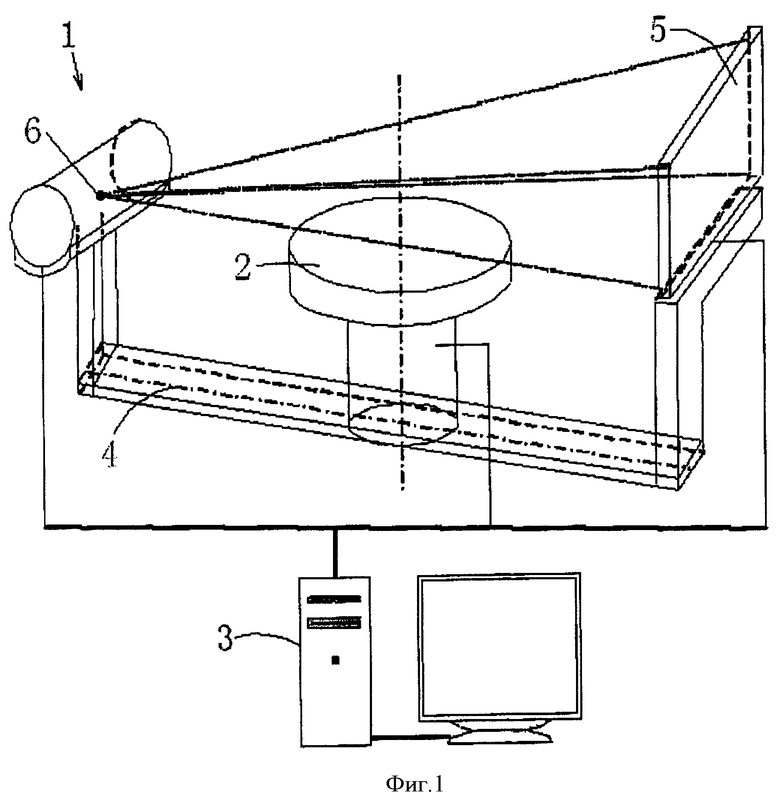
1. Система сканирования рентгеновского компьютерного томографа, содержащая основание (4), поворотную опору объекта (2), размещенную в основании (4) и служащую для размещения на ней контролируемого объекта, рентгеновский аппарат (1) и систему сбора данных, которые расположены на двух сторонах основания (4), и детектор (5), причем в исходном состоянии одна сторона детектора (5) выровнена с линией, продолжающей соединительную линию между источником рентгеновских лучей рентгеновского аппарата (1) и центром поворотной опоры объекта, или расположена от продолжающей линии на расстоянии меньшем, чем радиус поля изображений.
2. Система по п.1, в которой одна сторона детектора (5) выровнена с линией, продолжающей соединительную линию между источником рентгеновских лучей рентгеновского аппарата (1) и центром поворотной опоры или отстоит от нее на 1% радиуса поля изображения.
3. Система по п.1, в которой детектор представляет собой линейный матричный детектор или плоский матричный детектор.
4. Система по п.1, в которой рентгеновский аппарат (1) содержит рентгеновскую трубку, ускоритель рентгеновских лучей или источник излучения.
| US 5848117 A, 08.12.1998 | |||
| US 6359955 B1, 19.03.2002 | |||
| US 204013225 A1, 22.01.2004 | |||
| Вычислительный томограф | 1987 |
|
SU1518744A2 |

