ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Один или более вариантов осуществления настоящего изобретения относятся к томографическому аппарату и способу реконструкции его томографического изображения.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Аппараты медицинской визуализации применяются для получения изображения внутренней структуры объекта. Аппараты медицинской визуализации, которые являются аппаратами неинвазивного тестирования, осуществляют захват изображения и предоставляют обработанное изображение пользователю, включая обработанные структурные детали, внутренние ткани и поток жидкостей в человеческом теле. Пользователь, который является, например, врачом, может диагностировать состояние здоровья и заболевание пациента путем использования медицинского изображения, выдаваемого аппаратом обработки медицинских изображений.
Томографический аппарат является типичным аппаратом среди аппаратов для захвата изображения объекта путем проецирования рентгеновского излучения на пациента. В настоящем описании томографический аппарат включает в себя аппарат компьютерной томографии (КТ).
Из аппаратов обработки медицинских изображений томографический аппарат может предоставить изображение поперечного сечения объекта, явно показывающее внутреннюю структуру, например, органы, такие как почки, легкие, и т.д., объекта, без наложений между ними, в отличие от обычной рентгеновской установки. Соответственно, томографический аппарат широко применяется для точной диагностики заболеваний. В приведенном ниже описании медицинское изображение, полученное с помощью томографического аппарата, называется томографическим изображением.
Для того чтобы получить томографическое изображение, выполняется томографическое сканирование объекта с применением томографического аппарата, в результате чего получают исходные данные. Томографическое изображение реконструируют с использованием полученных исходных данных. Исходные данные могут представлять собой данные проецирования, полученные путем проецирования рентгеновского излучения в направлении объекта, или синограмму, которая представляет собой группу фрагментов данных проецирования.
Например, для получения томографического изображения выполняется операция реконструкции изображения с использованием синограммы, полученной с помощью томографического сканирования. Операция реконструкции томографического изображения подробно описана ниже в отношении фиг. 1А и 1B.
Фиг. 1А и 1B являются представлениями для описания операции томографической визуализации и реконструкции.
Подробно, фиг. 1A представляет собой диаграмму для описания операции томографической визуализации томографического аппарата, который выполняет томографическое сканирование при вращении вокруг объекта 25 и получает соответствующие исходные данные. Фиг. 1B представляет собой синограмму, полученную посредством томографического сканирования и реконструированное томографическое изображение.
Томографический аппарат генерирует и проецирует рентгеновское излучение в направлении объекта 25, а рентгеновское излучение, проходящее через объект 25, обнаруживается детектором рентгеновского излучения (не показан). Детектор рентгеновского излучения генерирует исходные данные, соответствующие обнаруженному рентгеновскому излучению.
Подробно, обратимся к фиг. 1A; генератор 20 рентгеновского излучения, входящий в состав томографического аппарата, проецирует рентгеновское излучение в направлении объекта 25. При томографическом сканировании, выполняемом томографическим аппаратом, генератор 20 рентгеновского излучения вращается вокруг объекта 25 и получает множество фрагментов первых, вторых, и третьих исходных данных 30, 31, и 32 в соответствии с углом вращения. Подробно, генератор 20 рентгеновского излучения получает первые, вторые и третьи исходные данные 30, 31, и 32 путем обнаружения рентгеновского пучка, приложенного к объекту 25 в положениях P1, P2 и P3, соответственно. Исходные данные могут представлять собой данные проецирования.
Для генерации одного томографического изображения поперечного сечения генератор 20 рентгеновского излучения выполняет томографическое сканирование в процессе вращения по меньшей мере на 180° (градусов).
Обратимся к фиг. 1B; как описано на фиг. 1A, синограмма 40 может быть получена путем объединения первых, вторых и третьих данных проецирования 30, 31, и 32, которые получают путем перемещения генератора 20 рентгеновского излучения в заранее заданном интервале углов. Синограмму 40 получают посредством томографического сканирования, выполняемого во время вращения генератора 20 рентгеновского излучения в течение одного цикла. Синограмма 40, соответствующая одному циклическому вращению, может использоваться для генерации одного томографического изображения поперечного сечения. Одно циклическое вращение может составлять примерно более половины оборота или один оборот в соответствии с техническими требованиями системы томографии.
Томографическое изображение 50 реконструируют путем выполнения обратной проекции с фильтрацией на синограмме 40.
Как правило, генератору 20 рентгеновского излучения требуется примерно 0,2 секунды для вращения на половину оборота.
Когда объект, который является целью томографического сканирования, двигается, движение объекта происходит во время одного цикла. Вследствие движения объекта могут возникнуть артефакты движения при реконструкции томографического изображения.
Фиг. 2 является представлением для описания артефактов движения, существующих на реконструированном томографическом изображении 200. Фиг. 2 иллюстрирует томографическое изображение, полученное посредством способа полной реконструкции, в котором изображение реконструируют с использованием исходных данных, полученных при вращении вокруг объекта 210 на 360 или более градусов.
Обратимся к фиг. 2; когда артефакты движения присутствуют на реконструированном томографическом изображении 200, наиболее удаленный (от центра) край 220 объекта 210 является неясным из-за артефактов движения. Кроме того, внутренний край 230 реконструированного томографического изображения 200 является нечетким из-за движения объекта 210.
Артефакты движения на томографическом изображении ухудшают качество томографического изображения и, таким образом, когда пользователь, например врач, читает томографическое изображение и диагностирует болезнь, пользователь не может точно прочитать томографическое изображение и диагностировать болезнь.
Таким образом, когда томографическое сканирование выполняется на движущемся объекте, важно реконструировать томографическое изображение, на котором уменьшена нечеткость изображения, вызванная артефактами движения.
РАСКРЫТИЕ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
Артефакты движения на томографическом изображении ухудшают качество томографического изображения и, таким образом когда пользователь, например врач, читает томографическое изображение и диагностирует болезнь, пользователь не может точно прочитать томографическое изображение и диагностировать болезнь.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
Как описано выше, когда томографическое сканирование выполняется на движущемся объекте, важно реконструировать томографическое изображение, на котором уменьшена нечеткость изображения, вызванная артефактами движения.
ПОЛЕЗНЫЕ ЭФФЕКТЫ
Один или более вариантов осуществления настоящего изобретения могут предоставить изображение с уменьшенными артефактами движения.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и/или другие аспекты станут очевидными и будут легче поняты из приведенного ниже описания вариантов осуществления, рассматриваемого в сочетании с прилагаемыми чертежами, на которых:
Фиг. 1А и 1B является видами для описания операций томографической визуализации и реконструкции;
Фиг. 2 является представлением для описания артефактов движения, существующих на реконструированном томографическом изображении;
Фиг. 3 является схематическим представлением системы томографии;
Фиг. 4 является блочной диаграммой, иллюстрирующей структуру системы томографии согласно одному из вариантов осуществления настоящего изобретения;
Фиг. 5 является блочной диаграммой, иллюстрирующей структуру коммуникатора;
Фиг. 6 является блочной диаграммой, иллюстрирующей томографический аппарат согласно одному из вариантов осуществления настоящего изобретения;
Фиг. 7 является блочной диаграммой, иллюстрирующей томографический аппарат согласно другому варианту осуществления настоящего изобретения;
Фиг. 8А и 8B являются представлениями для описания реконструкции томографического изображения согласно способу половинной реконструкции;
Фиг. 9А и 9B являются представлениями для описания режима сканирования для томографического сканирования;
Фиг. 10А и 10B являются представлениями для описания формы рентгеновского пучка, спроецированного в направлении объекта;
Фиг. 11 является представлением для описания функционирования томографического аппарата согласно одному из вариантов осуществления настоящего изобретения;
Фиг. 12 является представлением для описания функционирования томографического аппарата согласно одному из вариантов осуществления настоящего изобретения;
Фиг. 13А, 13B, и 13C являются представлениями для описания движения объекта;
Фиг. 14 является представлением для описания движения объекта;
Фиг. 15 является представлением для описания операции реконструкции целевого изображения;
Фиг. 16А и 16B являются представлениями для описания установки целевого времени;
Фиг. 17 является представлением для описания установки целевого времени;
Фиг. 18А и 18B являются представлениями для описания реконструкции целевого изображения, указывающего объект, который не двигается;
Фиг. 18C и 18D являются представлениями для описания артефактов движения, которые могут быть сгенерированы во время реконструкции целевого изображения, указывающего объект, который двигается;
фиг. 18E является представлением для описания объекта, представленного на 3D-томографическом изображении;
Фиг. 19А и 19B являются представлениями для описания измерения величины движения объекта;
Фиг. 20А и 20B являются представлениями для описания операции реконструкции целевого изображения;
Фиг. 20C является реконструированным целевым изображением;
Фиг. 21А и 21B являются представлениями для описания операции реконструкции целевого изображения;
Фиг. 21C является реконструированным целевым изображением;
Фиг. 22А и 22B являются представлениями для описания операции деформации, применяемой для реконструкции целевого изображения;
Фиг. 23А и 23B являются представлениями для описания операции деформации, применяемой для реконструкции целевого изображения;
Фиг. 24А и 24B являются представлениями для описания операции реконструкции целевого изображения;
Фиг. 25А и 25B являются представлениями для описания реконструированных целевых изображений;
Фиг. 26 является представлением для описания измерения величины движения объекта;
Фиг. 27 является представлением для описания артефактов движения, существующих на реконструированном томографическом изображении;
Фиг. 28 является представлением для описания артефактов движения, существующих на реконструированном томографическом изображении;
Фиг. 29А и 29B иллюстрируют экраны пользовательского интерфейса, показанные на томографическом аппарате, согласно вариантам осуществлениям настоящего изобретения;
Фиг. 30 является представлением, иллюстрирующим экран пользовательского интерфейса, показанный на томографическом аппарате, согласно одному из вариантов осуществления настоящего изобретения;
Фиг. 31А и 31B является представлениями, иллюстрирующими экран пользовательского интерфейса, показанный на томографическом аппарате, согласно одному из вариантов осуществления настоящего изобретения;
Фиг. 32 является блок-схемой для объяснения способа реконструкции томографического изображения согласно одному из вариантов осуществления настоящего изобретения; и
Фиг. 33 является блок-схемой для объяснения способа реконструкции томографического изображения согласно другому варианту осуществления настоящего изобретения.
Фиг. 34A является реконструированным целевым изображением, сгенерированным обычной КТ-системой.
Фиг. 34B является реконструированным целевым изображением, полученным томографическим аппаратом согласно примерным вариантам осуществлениям настоящего изобретения.
ЛУЧШИЙ ВАРИАНТ
По настоящей заявке испрашивается приоритет предварительной заявки на патент США № 61/942731, поданной 21 февраля 2014, заявки на патент Кореи № 10-2014-0093405, поданной 23 июля 2014 в Корейскую службу по защите прав интеллектуальной собственности, и заявки на патент Кореи № 10-2014-0115697, поданной 1 сентября 2014, в Корейскую службу по защите прав интеллектуальной собственности, раскрытия которых включены в настоящее описании во всей их полноте по ссылке.
Один или более вариантов осуществления настоящего изобретения включают томографический аппарат, который может уменьшить возникновение артефактов движения на реконструированном томографическом изображении, и способ реконструкции его томографического изображения.
Один или более вариантов осуществления настоящего изобретения включают в себя томографический аппарат, который может уменьшить дозу радиации, воздействующей на тело человека, и может реконструировать томографическое изображение, в котором уменьшено возникновение артефактов движения, и способ реконструкции его томографического изображения.
Дополнительные аспекты будут сформулированы частично в приведенном ниже описании и, частично, будут очевидны из описания или могут быть изучены при практическом применении представленных вариантов осуществления.
Согласно одному или более вариантам осуществления настоящего изобретения томографический аппарат включает в себя: получатель данных, получающий первое изображение и второе изображение, которые являются частичными изображениями, путем использования данных, полученных в первом угловом сечении, соответствующем первому времени, и втором угловом сечении, соответствующем второму времени и находящемся напротив первого углового сечения, посредством выполнения томографического сканирования объекта, который двигается, и получения первой информации, указывающей величину движения объекта, с использованием первого изображения и второго изображения; и реконструктор изображения, реконструирующий целевое изображение, указывающее объект в целевое время, на основании первой информации.
Каждое из первого углового сечения и второго углового сечения может составлять менее 180°.
Первая информация может быть получена путем сравнения только первого изображения и второго изображения.
Объект, изображенный на первом изображении, и объект, изображенный на втором изображении, могут отличаться друг от друга в по меньшей мере одном из размера, положения и формы.
На целевом изображении степень коррекции движения (MC) объекта, указанная на целевом изображении, может изменяться в соответствии с целевым временем.
На целевом изображении коррекция движения объекта, когда целевое время может соответствовать среднему углу между первым угловым сечением и вторым угловым сечением, может быть улучшена по сравнению с коррекцией движения объекта, когда целевое время не соответствует среднему углу.
Первая информация может указывать величину движения поверхности, формирующей объект.
Первая информация может указывать величину движения поверхности, формирующей объект, соответствующую временным точкам, как информацию, соответствующую полю вектора движения между первым и вторым изображением.
Поле вектора движения может быть измерено посредством нежесткой регистрации.
В первой информации значение временной точки и значение величины движения поверхности, указанное как поле вектора движения, могут иметь линейную зависимость.
Получатель данных может получать первое изображение и второе изображение с использованием исходных данных, полученных посредством выполнения томографического сканирования в угловом сечении одного цикла, которое составляет менее одного оборота, а первое угловое сечение и второе угловое сечение могут являться, соответственно, начальным сечением и конечным сечением углового сечения за один цикл.
Реконструктор изображения может реконструировать целевое изображение путем использования множества фрагментов данных проецирования, соответствующих множеству проекций, которые являются исходными данными, полученными посредством выполнения томографического сканирования при вращении менее чем на один оборот.
Первая информация может содержать информацию о движениях поверхности объекта во всех направлениях, при этом объект изображается на первом изображении и втором изображении.
Реконструктор изображения может оценить величину движения объекта в целевое время на основании первой информации и реконструирует целевое изображение на основании оцененной величины движения.
Реконструктор изображения может реконструировать целевое изображение путем деформирования множества частичных изображений, представляющих части объекта, на основании первой информации.
Реконструктор изображения может деформировать сетку изображения в целях изображения объекта на основании первой информации, и реконструирует целевое изображение путем использования деформированной сетки изображения.
В процессе обратного проецирования реконструктор изображения может реконструировать целевое изображение путем деформирования пикселя, соответствующего данным, полученным посредством КТ-сканирования, на основании первой информации.
Реконструктор изображения может реконструировать целевое изображение путем деформирования центра воксела, указывающего объект, на основании первой информации и выполнения обратного проецирования относительно положения деформированного воксела.
Томографический аппарат может также включать в себя отображение пользовательского интерфейса, принимающего информацию, указывающую зависимость между временем и величиной движения объекта, указанную в первой информации, через экран пользовательского интерфейса для установки первой информации, при этом получатель данных получает первую информацию на основании информации, указывающей зависимость.
Получатель данных может выполнять томографическое сканирование в угловом сечении, имеющем угол 180+дополнительный угол, в способе половинной реконструкции с использованием перегруппированного параллельного пучка.
Получатель данных может получать данные проецирования, соответствующие угловому сечению, имеющему угол 180+дополнительный угол, а дополнительный угол может составлять от примерно 30 до 70°.
Томографический аппарат может также содержать устройство отображения, отображающее экран пользовательского интерфейса, который включает в себя меню для установки целевого времени.
Томографический аппарат может также включать в себя устройство отображения, отображающее экран, который содержит по меньшей мере одно из первой информации, экрана пользовательского интерфейса для установки первой информации, целевого времени и целевого изображения.
Получатель данных может разделять данные проецирования, полученные посредством выполнения томографического сканирования при вращении вокруг объекта, на множество парных проекционных секторов, получать множество пар частичных изображений, включающих в себя первое изображение и второе изображение в каждом из упомянутого множества парных проекционных секторов, и получать первую информацию посредством использования упомянутого множества пар частичных изображений, соответствующих упомянутому множеству парных проекционных секторов.
Томографический аппарат может дополнительно содержать: устройство отображения, отображающее медицинское изображение; и пользовательский интерфейс для установки области исследования медицинского изображения, при этом получатель данных извлекает по меньшей мере одну поверхность, включенную в область исследования, устанавливает по меньшей мере одно из первого углового сечения, второго углового сечения, начального положения углового сечения за один цикл, конечного положения углового сечения за один цикл и целевого времени на основании направления извлеченной поверхности, получает первое изображение и второе изображение в первом угловом сечении и втором угловом сечении, соответственно, соответствующие установке, и получает первую информацию, указывающую величину движения объекта посредством использования первого изображения и второго изображения.
Получатель данных может установить по меньшей мере одно из первого углового сечения, второго углового сечения, первого времени, второго времени, начального положения углового сечения за один цикл, конечного положения углового сечения за один цикл и целевого времени с учетом направления, в котором движется объект.
Объект может представлять собой по меньшей мере одно из сердца, брюшной полости, матки, мозга, груди и печени.
Объект может представлять собой сердце, выраженное посредством поверхности, а сердце может включать в себя по меньшей мере одну из тканей, имеющих различные значения яркости в заранее заданной области.
Получатель данных может выполнять томографическое сканирование согласно по меньшей мере одному из способа осевого сканирования и способа винтового сканирования.
Получатель данных может получать дополнительную информацию, которая представляет собой информацию о движении, сгенерированную в по меньшей мере одном из объекта или области за пределами объекта во время томографического сканирования, и может получать первую информацию, указывающую величину движения объекта, на основании первого изображения, второго изображения и дополнительной информации.
Получатель данных может получать множество пар частичных изображений, включающих в себя первое изображение и второе изображение, которые изображают одну и ту же часть объекта, посредством применения винтового способа сканирования, и может получать первую информацию посредством использования упомянутого множества пар частичных изображений.
Согласно одному или более вариантам осуществления настоящего изобретения томографический аппарат содержит: получатель данных, получающий первое изображение, указывающее первое изображение, указывающее поверхность части объекта, и второе изображение, указывающее поверхность части объекта, которые являются частичными изображениями, соответствующими первому времени и второму времени, посредством выполнения томографического сканирования объекта, который двигается, и получающий первую информацию, указывающую движение объекта посредством использования первого изображения и второго изображения; и реконструктор изображения, реконструирующий целевое изображение посредством использования первой информации.
Первое изображение и второе изображение могут представлять собой частичные изображения, реконструированные с использованием данных, полученных в первом угловом сечении и втором угловом сечении, имеющих значения менее 180 градусов.
Первая информация может быть получена путем сравнения только первого изображения и второго изображения.
Объект, изображенный на первом изображении, и объект, изображенный на втором изображении, могут отличаться друг от друга по меньшей мере в одном из размера, положения и формы.
Первая информация может представлять собой информацию, указывающую величину движения поверхности, формирующей объект, соответствующую моменту времени, в форме информации, соответствующей полю вектора движения между первым изображением и вторым изображением.
Получатель данных может выполнять томографическое сканирование в угловом сечении за один цикл, которое составляет менее одного оборота, и первое время может соответствовать начальному сечению углового сечения за один цикл, и второе время соответствует конечному сечению углового сечения за один цикл.
Реконструктор изображения может реконструировать целевое изображение, указывающее объект в целевое время между первым временем и вторым временем, на основании первой информации.
На целевом изображении степень коррекции движения объекта, включенного в целевое изображение, может изменяться согласно целевому времени.
На целевом изображении коррекция движения объекта в случае, когда целевое время может соответствовать среднему углу между первым угловым сечением и вторым угловым сечением, может быть улучшена по сравнению с коррекцией движения объекта в случае, когда целевое время не соответствует среднему углу.
Реконструктор изображения может реконструировать целевое изображение посредством использования множества фрагментов данных проецирования, соответствующих множеству проекций, которые являются исходными данными, полученными посредством выполнения томографического сканирования при вращении менее чем на один оборот.
Первая информация может представлять собой информацию, указывающую величину движения поверхности объекта в течение периода между первым временем и вторым временем.
Согласно одному или более вариантам осуществления настоящего изобретения способ реконструкции томографического изображения включает в себя: получение первого изображения и второго изображения, которые являются частичными изображениями, с использованием данных, полученных в первом угловом сечении, соответствующем первому времени, и втором угловом сечении, соответствующем второму времени и находящемся напротив первого углового сечения, посредством выполнения томографического сканирования на объекте, который движется; получение первой информации, указывающей величину движения объекта в момент времени, посредством использования первого изображения и второго изображения; и реконструкцию целевого изображения, указывающую объект в целевое время, на основании первой информации.
Каждое из первого углового сечения и второго углового сечения может быть меньше, чем 180°.
Получение первой информации может включать в себя получение первой информации путем сравнения только первого изображения и второго изображения.
Объект, изображенный на первом изображении и объект, изображенный на втором изображении, могут отличаться друг от друга в по меньшей мере одном из размера, положения и формы.
На целевом изображении степень коррекции движения объекта, указанная на целевом изображении, может изменяться согласно целевому времени.
На целевом изображении коррекция движения объекта, когда целевое время может соответствовать среднему углу между первым угловым сечением и вторым угловым сечением, может быть улучшена по сравнению с коррекцией движения объекта, когда целевое время не соответствует среднему углу.
Первая информация может указывать величину движения поверхности, формирующей объект.
Первая информация может указывать величину движения поверхности, формирующей объект, соответствующую моменту времени, в форме информации, соответствующей полю вектора движения между первым и вторым изображением.
Поле вектора движения может быть измерено посредством применения гибкой регистрации.
В первой информации значение временной точки и значение величины движения поверхности, указанное в форме поля вектора движения, могут иметь линейную зависимость.
Получение первого изображения и второго изображения может включать в себя получение первого изображения и второго изображения посредством использования исходных данных, полученных посредством выполнения томографического сканирования в угловом сечении за один цикл, которое составляет менее одного оборота, и первое угловое сечение и второе угловое сечение могут являться начальным сечением и конечным сечением углового сечения за один цикл, соответственно.
Реконструкция целевого изображения может включать в себя реконструкцию целевого изображения посредством использования множества фрагментов данных проецирования, соответствующих множеству проекций, которые являются исходными данными, полученными посредством выполнения томографического сканирования при вращении менее чем на один оборот.
Первая информация может включать в себя информацию о движении поверхности объекта во всех направлениях, при этом объект изображается на первом изображении и втором изображении.
Реконструкция целевого изображения может включать в себя оценку величины движения объекта в целевое время на основании первой информации и реконструкции целевого изображения на основании оцененной величины движения.
Реконструкция целевого изображения может включать в себя реконструкцию целевого изображения путем деформирования множества частичных изображений, указывающих части объекта, на основании первой информации.
Реконструкция целевого изображения может включать в себя: деформирование центра воксела, указывающего объект, на основании первой информации; и реконструкцию целевого изображения путем выполнения обратного проецирования относительно положения деформированного воксела.
Способ может также включать в себя прием информации, указывающей зависимость между временем и величиной движения объекта, указанного в первой информации, через экран пользовательского интерфейса для установки первой информации, при этом при получении первой информации первую информацию получают на основании информации, указывающей такую зависимость.
Получение первого изображения и второго изображения может включать в себя выполнение томографического сканирования в угловом сечении, имеющем угол 180+дополнительный угол в способе половинной реконструкции с использованием перегруппированного параллельного пучка.
Способ может дополнительно включать в себя получение данных проецирования, соответствующих углу 180+дополнительный угол, при этом дополнительный угол имеет значение от примерно 30 до 70°.
Способ может дополнительно включать в себя отображение экрана пользовательского интерфейса, который может содержать меню для установки целевого времени.
Способ может дополнительно включать в себя отображение экрана, который может содержать по меньшей мере одно из первой информации, экрана пользовательского интерфейса для установки первой информации, целевого времени и целевого изображения.
Получение первого изображения и второго изображения может включать в себя: разделение данных проецирования, полученных посредством выполнения томографического сканирования при вращении вокруг объекта, на множество парных проекционных секторов; и получение множества пар частичных изображений, включающих в себя первое изображение и второе изображение, в каждом упомянутом множестве парных проекционных секторов, и получение первой информации может включать в себя получение первой информации посредством использования упомянутого множества пар частичных изображений, соответствующих упомянутому множеству парных проекционных секторов.
Способ может также включать в себя: отображение медицинского изображения; и установку области исследования медицинского изображения, при этом получение первого изображения и второго изображения может включать в себя извлечение по меньшей мере одной поверхности, включенной в область исследования, установку по меньшей мере одного из первого углового сечения, второго углового сечения, положения начала углового сечения за один цикл, положения конца углового сечения за один цикл и целевого времени на основании направления извлеченной поверхности, получение первого изображения и второго изображения в первом угловом сечении и втором угловом сечении, соответственно, согласно установке и получение первой информации, указывающей величину движения объекта, посредством использования первого изображения и второго изображения.
Способ может также включать в себя установку по меньшей мере одного из первого углового сечения, второго углового сечения, первого времени, второго времени, положение начала углового сечения за один цикл, положения конца углового сечения за один цикл и целевого времени с учетом направления, в котором движется объект.
Объект может представлять собой по меньшей мере одно из сердца, брюшной полости, матки, мозга, груди и печени.
Объект может представлять собой сердце, выраженное посредством поверхности, и сердце может включать по меньшей мере одну из тканей, имеющих различные значения яркости в заранее заданной области.
Способ может дополнительно включать в себя выполнение томографического сканирования согласно по меньшей мере одному из способа осевого сканирования и способа винтового сканирования.
Способ может дополнительно включать в себя получение дополнительной информации, которая является информацией о движении, сгенерированном в по меньшей мере одном из объекта или за пределами объекта во время томографического сканирования, при этом получение первой информации может включать в себя получение первой информации, указывающей величину движения объекта, на основании первого изображения, второго изображения и дополнительной информации.
Получение первого изображения и второго изображения может включать в себя получение множества пар частичных изображений, включающих в себя первое изображение и второе изображение, которые изображают одну и ту же часть объекта, посредством применения способа винтового сканирования, и получение первой информации может включать в себя получение первой информации посредством использования упомянутого множества пар частичных изображений.
Согласно одному или более вариантам осуществления настоящего изобретения способ реконструкции томографического изображения включает в себя: получение первого изображения и второго изображения, которые указывают одни и те же части поверхности, формирующей объект, и являются частичными изображениями, соответствующими первому времени и второму времени, посредством выполнения томографического сканирования объекта, который движется; получение первой информации, указывающей движение объекта, посредством использования первого изображения и второго изображения; и реконструкцию целевого изображения посредством использования первой информации.
Первое изображение и второе изображение могут являться частичными изображениями, реконструированными с использованием данных, полученных в первом угловом сечении и втором угловом сечении, которые составляют менее 180°.
При получении первой информации первая информация может быть получена путем сравнения только первого изображения и второго изображения.
Объект, изображаемый на первом изображении, и объект, изображаемый на втором изображении, могут отличаться друг от друга в по меньшей мере одном из размера, положения и формы.
Первая информация может представлять собой информацию, указывающую величину движения поверхности, формирующей объект, соответствующую моменту времени, в форме информации, соответствующей полю вектора движения между первым изображением и вторым изображением.
Получение первого изображения и второго изображения может включать в себя выполнение томографического сканирования в угловом сечении за один цикл, который составляет менее одного оборота, и первое время может соответствовать начальному сечению углового сечения за один цикл, и второе время может соответствовать конечному сечению углового сечения за один цикл.
Реконструкция целевого изображения может включать в себя реконструкцию целевого изображения, указывающего объект в целевое время между первым временем и вторым временем, на основании первой информации.
На целевом изображении степень коррекции движения объекта, включенного в целевое изображение, может изменяться согласно целевому времени.
На целевом изображении коррекция движения объекта в случае, когда целевое время соответствует среднему углу между первым угловым сечением и вторым угловым сечением, может быть улучшена по сравнению с коррекцией движения объекта в случае, когда целевое время не соответствует среднему углу.
Реконструкция целевого изображения может включать в себя реконструкцию целевого изображения посредством использования множества фрагментов данных проецирования, соответствующих множеству проекций, которые являются исходными данными, полученными посредством выполнения томографического сканирования при вращении менее чем на один оборот.
Первая информация может представлять собой информацию, указывающую величину движения поверхности объекта в течение периода между первым временем и вторым временем.
Согласно одному или более вариантам осуществления настоящего изобретения томографический аппарат содержит: получатель данных, получающий первое частичное изображение и второе частичное изображение, которые являются частичными изображениями, с использованием данных, полученных в каждом из начального углового сечения и конечного углового сечения, находящегося напротив первого углового сечения, посредством выполнения томографического сканирования объекта, который двигается, и получения первой информации, указывающей зависимость между временем и величиной движения поверхности объекта, соответствующую полю вектора движения между первым частичным изображением и вторым частичным изображением; и реконструктор изображения, реконструирующий целевое изображение, указывающее объект в целевое время, на основании первой информации.
Согласно одному или более вариантам осуществления настоящего изобретения томографический аппарат содержит: получатель данных, получающий первое изображение и второе изображение, которые являются частичными изображениями, соответственно, соответствующими первому времени и второму времени и указывающими одни и те же части поверхностей, формирующих объект, посредством выполнения томографического сканирования объекта, который двигается, и получения первой информации, указывающей движение объекта, посредством использования первого изображения и второго изображения; и реконструктор изображения, реконструирующий целевое изображение, указывающее объект в целевое время, посредством деформирования по меньшей мере одного из исходных данных, необходимых для половинной реконструкции, и изображения, полученного путем выполнения отфильтрованного обратного проецирования на исходных данных, на основании первой информации.
Согласно одному или более вариантам осуществления настоящего изобретения томографический аппарат содержит: получатель данных, получающий первое изображение и второе изображение, которые являются частичными изображениями, с использованием данных, полученных в первом угловом сечении, соответствующем первому моменту времени, и втором угловом сечении, соответствующем второму времени и находящемся напротив первого углового сечения, посредством выполнения томографического сканирования объекта и получения первой информации, указывающей величину движения объекта, посредством использования первого изображения и второго изображения; и реконструктор изображения, реконструирующий целевое изображение, указывающее объект в целевое время, на основании первой информации.
Согласно одному или более вариантам осуществления настоящего изобретения аппарат медицинской визуализации содержит: получатель данных, получающий первое изображение и второе изображение, которые являются частичными изображениями, с использованием данных, полученных в первом угловом сечении, соответствующем первому моменту времени, и втором угловом сечении, соответствующем второму времени и находящемся напротив первого углового сечения, посредством выполнения томографического сканирования объекта, который движется, и получения первой информации, указывающей величину движения объекта, посредством использования первого изображения и второго изображения; и реконструктор изображения, реконструирующий целевое изображение, указывающее объект в целевое время, на основании первой информации.
ВАРИАНТ ДЛЯ ИЗОБРЕТЕНИЯ.
Преимущества и особенности одного или более вариантов осуществления настоящего изобретения и способов их выполнения могут быть лучше поняты с использованием приведенного ниже подробного описания вариантов осуществления и прилагаемых чертежей. В этом отношении настоящие варианты осуществления могут иметь различные формы и не должны рассматриваться как ограниченные описаниями, сформулированными в настоящем раскрытии. Напротив, данные варианты осуществления представлены таким образом, чтобы данное раскрытие являлось полным и законченным и полностью передавало бы концепцию настоящих вариантов осуществления для специалиста в данной области техники, и настоящее изобретение будет определяться только пунктами прилагаемой формулы изобретения. Аналогичные цифровые обозначения относятся к аналогичным элементам всюду в описании изобретения.
Далее в настоящем раскрытии будут кратко определены термины, использованные в описании изобретения, и варианты осуществления будут теперь описаны подробно.
Все термины, включая описательные или технические термины, использованные в настоящем раскрытии, должны рассматриваться как имеющие значения, которые являются очевидными для специалиста в данной области техники. Однако термины могут иметь различные значения в соответствии с намерениями специалиста в данной области техники, прецедентных случаях или при возникновении новых технологий. Кроме того, некоторые условия могут быть произвольно выбраны заявителем, и в этом случае значение выбранных терминов будет описано подробно в подробном описании изобретения. Таким образом, термины, использованные в настоящем раскрытии, должны быть определены на основании значения терминов с учетом описания всюду в спецификации.
Когда часть «включает в себя» или «содержит» элемент, если отсутствует конкретное описание противоположного, часть может также включать в себя другие элементы, не исключая другие элементы. Кроме того, термин «блок» в вариантах осуществлениях настоящего изобретения означает компонент программного обеспечения или компоненты аппаратного обеспечения, такие как программируемая пользователем матрица логических элементов (FPGA) или специализированная интегральная микросхема (ASIC), и выполняет определенную функцию. Однако термин «блок» не ограничен программным обеспечением или аппаратным обеспечением. «Блок» может быть сформирован таким образом, чтобы он находился в адресном запоминающем устройстве, или может быть сформирован таким образом, чтобы оперировать одним или более процессорами. Таким образом, например, термин «блок» может относится к таким компонентам, как компоненты программного обеспечения, компоненты объектно-ориентированного программного обеспечения, компоненты классов и компоненты задач, и может включать в себя процессы, функции, атрибуты, процедуры, подпрограммы, сегменты программного кода, драйверы, встроенное программное обеспечение, микрокоды, схемы, данные, базы данных, структуры данных, таблицы, массивы или переменные. Функция, предоставляемая компонентами и «блоками», может быть ассоциирована с меньшим числом компонентов и «блоков», или может быть разделена на дополнительные компоненты и «блоки».
Ниже будут подробно рассматриваться варианты осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. В этом отношении существующие варианты осуществления могут иметь различные формы и не должны рассматриваться как ограниченные описаниями, сформулированными в настоящем раскрытии. В приведенном ниже описании хорошо известные функции или конструкции не описаны подробно, поскольку они снизили бы ясность изложения вариантов осуществления вследствие наличия ненужных подробностей.
При использовании в настоящем раскрытии термин «и/или» включает любые возможные комбинации одного или более связанных перечисленных элементов. Такие выражения, как «по меньшей мере один из», при предшествовании списку элементов изменяют весь список элементов и не изменяют отдельные элементы списка.
Всюду в спецификации «изображение» может означать многомерные данные, сформированные из дискретных элементов изображения, например, пикселей на двумерном (2D) изображении и вокселов на трехмерном (3D) изображении. Например, изображение может включать в себя медицинское изображение объекта, захваченное томографическим аппаратом визуализации.
Всюду в спецификации «томографическое изображение» может означать изображение, полученное посредством выполнения томографического сканирования объекта посредством применения томографического аппарата визуализации, то есть, изображение, полученное путем проецирования пучка света, такого как рентгеновское излучение, в направлении объекта и визуализации с использованием данных проецирования. Всюду в спецификации «томографическое изображение» может означать изображение, сгенерированное путем синтезирования множества рентгеновских изображений, полученных путем захвата изображения объекта во время вращения томографического аппарата визуализации вокруг по меньшей мере одной оси относительно объекта.
Всюду в спецификации примеры «объекта» могут включать в себя человека, животное или часть человека или животного. Например, примеры объекта могут включать в себя по меньшей мере один из органов, таких как печень, сердце, матка, мозг, грудь, брюшная полость, и т.д., и кровеносные сосуды. Кроме того, объект может включать модель. Модель означает материал, имеющий объем, который является очень близким по плотности и эффективному атомному номеру к организму, и может включать в себя сферическую модель, обладающую характеристикой, аналогичной физическому телу.
Всюду в спецификации «пользователь» может являться, но не ограничивается указанным, медицинским экспертом, включая доктора, медсестру, медицинского лабораторного технолога, медицинского эксперта по изображениям и технического специалиста, ремонтирующего медицинский аппарат.
Поскольку томографическая система, такая как КТ-система, способна предоставлять изображение поперечного сечения объекта, томографическая система может отображать внутреннюю структуру (например, органы, такие как почки, легкие, и т.д.) объекта без наложений между ними, в отличие от обычного аппарата рентгеновской визуализации.
Подробно, томографическая система может включать в себя все томографические аппараты, такие как аппарат компьютерной томографии (КТ), оптической когерентной томографии (OCT) или PET-КТ система. В приведенном ниже описании КТ-система иллюстрируется как томографическая система.
Томографическая система может получать множество фрагментов данных изображения с толщиной не более 2 мм от нескольких десятков до нескольких сотен раз в секунду, и затем может обрабатывать упомянутое множество фрагментов данных изображения таким образом, чтобы томографическая система могла предоставить относительно точное изображение поперечного сечения объекта. Согласно уровню техники может быть получено только горизонтальное изображение поперечного сечения объекта, но эта сложность была преодолена благодаря различным способам реконструкции изображения. Примеры способов реконструкции 3D-изображения указаны ниже:
Отображение теневой поверхности (SSD) - начальный способ 3D-визуализации, отображающий только вокселы, имеющие заранее заданные значения единиц по шкале Хаунсфилда (HU).
Проекция максимальной интенсивности (MIP)/проекция минимальной интенсивности (MinIP) - способ 3D-визуализации, отображающий только вокселы, имеющие наибольшее или наименьшее значение HU из числа вокселов, по которым строится изображение.
Визуализация объемов (VR) - способ визуализации, способный к настройке цвета и прозрачности вокселов, по которым строится изображение, согласно областям исследования.
Виртуальная эндоскопия - способ, позволяющий осуществлять эндоскопическое наблюдение по 3D-изображению, реконструированному посредством применения VR-способа или SSD-способа.
Многоплоскостное переформатирование (MPR) - способ, применяемый для реконструкции изображения в другое изображение поперечного сечения. Пользователь может реконструировать изображение в каждом требуемом направлении.
Редактирование - способ, включающий в себя редактирование смежных вокселов, с тем чтобы позволить пользователю легко наблюдать область исследования при визуализации объема.
Представляющие интерес вокселы (VOI) - способ, показывающий только выбранную область при визуализации объемов.
Томографическая система 100 согласно одному из вариантов осуществления настоящего изобретения будет теперь описана в отношении фиг. 3. Томографическая система 100 может включать в себя устройства различных типов.
Фиг. 3 схематично иллюстрирует томографическую систему 100. Обратимся к фиг. 3; томографическая система 100 может включать в себя «гантри» 102, стол 105, генератор 106 рентгеновского излучения и детектор 108 рентгеновского излучения.
«Гантри» 102 может включать в себя генератор 106 рентгеновского излучения и детектор 108 рентгеновского излучения.
Объект 10 может быть помещен на стол 105.
Стол 105 может перемещаться в заранее заданном направлении, например, по меньшей мере одном из направлений вверх, вниз, вправо и влево во время процедуры томографической визуализации. Кроме того, стол 105 может наклоняться или вращаться на заранее заданную величину в заранее заданном направлении.
«Гантри» 102 также может наклоняться на заранее заданную величину в заранее заданном направлении.
Фиг. 4 представляет собой диаграмму, иллюстрирующую структуру томографической системы 100 согласно одному из вариантов осуществления настоящего изобретения.
Томографическая система 100 может включать в себя «гантри» 102, стол 105, блок 118 управления, память 124, блок 126 обработки изображений, блок 128 ввода, устройство отображения 130 и коммуникатор 132.
Как описано выше, объект 10 может быть помещен на стол 105. В настоящем варианте осуществления стол 105 может перемещаться в заранее заданном направлении, например, по меньшей мере одном из направлений вверх, вниз, вправо и влево, и движением стола 105 может управлять блок 118 управления.
«Гантри» 102 может включать в себя поворотную раму 104, генератор 106 рентгеновского излучения, детектор 108 рентгеновского излучения, блок 110 привода вращения, систему 116 сбора данных (DAS) 116 и блок 120 передачи данных.
«Гантри» 102 может включать в себя поворотную раму 104, имеющую форму петли, выполненную с возможностью вращения относительно заранее заданной оси вращения RA. Кроме того, поворотная рама 104 может иметь форму диска.
Поворотная рама 104 может содержать генератор 106 рентгеновского излучения и детектор 108 рентгеновского излучения, которые расположены противоположно друг другу, с тем чтобы иметь заранее заданную область сканирования (FOV). Поворотная рама 104 может также содержать отсеивающий растр 114. Отсеивающий растр 114 может быть помещен между генератором 106 рентгеновского излучения и детектором 108 рентгеновского излучения.
Хотя на фиг. 4 проиллюстрировано, что поворотная рама 104 содержит один генератор 106 рентгеновского излучения, поворотная рама 104 может содержать множество генераторов рентгеновского излучения. Кроме того, в случае, когда поворотная рама 104 содержит множество генераторов рентгеновского излучения, поворотная рама 104 содержит множество детекторов рентгеновского излучения, соответствующее упомянутому множеству генераторов рентгеновского излучения. Подробно, один генератор 106 рентгеновского излучения представляет собой один источник рентгеновского излучения. Например, в случае, когда поворотная рама 104 содержит два генератора 106 рентгеновского излучения, можно сказать, что поворотная рама 104 содержит двойной источник. В приведенном ниже описании в случае, когда поворотная рама 104 содержит один генератор 106 рентгеновского излучения, данный генератор 106 рентгеновского излучения, содержащийся в поворотной раме 104, называется одиночным источником. Кроме того, в случае, когда поворотная рама 104 содержит два генератора рентгеновского излучения (не показано), два генератора рентгеновского излучения, включенные в поворотную раму 104, называются двойным источником. Из двух генераторов рентгеновского излучения, формирующих двойной источник, один генератор рентгеновского излучения называется первым источником, и другой генератор рентгеновского излучения называется вторым источником. Кроме того, томографическая система 100, в которой генератор 106 рентгеновского излучения содержится в поворотной раме 104, называется томографическим аппаратом с одиночным источником, а когда два генератора рентгеновского излучения содержатся в поворотной раме 104, может называться томографическим аппаратом с двойным источником.
В медицинской системе визуализации рентгеновское излучение, достигающее детектора (или светочувствительной пленки) включает в себя не только ослабленное основное излучение, формирующее полезное изображение, но также и рассеянное излучение, ухудшающее качество изображения. В целях передачи большей части основной радиации и ослабления рассеянного излучения, отсеивающий растр 114 может быть помещен между пациентом и детектором (или светочувствительной пленкой).
Например, отсеивающий растр 114 может быть сформирован из поочередно уложенных полос свинцовой фольги и промежуточного материала, такого как материал из твердого полимера, твердый полимер или волокнистый композиционный материал. Однако формирование отсеивающего растра 114 не ограничено этим.
Поворотная рама 104 может принимать пусковой сигнал от блока 110 привода вращения и может вращать генератор 106 рентгеновского излучения и детектор 108 рентгеновского излучения на заранее заданной скорости вращения. Поворотная рама 104 может принимать пусковой сигнал и питание от блока 110 привода вращения в то время, когда поворотная рама 104 контактирует с блоком 110 привода вращения через токосъемное контактное кольцо (не показано). Кроме того, поворотная рама 104 может принимать пусковой сигнал и питание от блока 110 привода вращения через беспроводную связь.
Генератор 106 рентгеновского излучения может принимать напряжение и ток от блока распределения питания (PDU) (не показан) через токосъемное контактное кольцо (не показано) и электрический генератор высокого напряжения (не показан), и затем может генерировать и проецировать рентгеновское излучение. В случае, когда электрический генератор высокого напряжения прилагает заранее заданное напряжение (далее в настоящем раскрытии называемое напряжением на лампе) к генератору 106 рентгеновского излучения, генератор 106 рентгеновского излучения может генерировать рентгеновское излучение, имеющее множество энергетических спектров, соответствующих напряжению на лампе.
Рентгеновское излучение, сгенерированное генератором 106 рентгеновского излучения, может испускаться в заранее заданной форме благодаря коллиматору 112.
Детектор 108 рентгеновского излучения может быть расположен напротив генератора 106 рентгеновского излучения. Детектор 108 рентгеновского излучения может включать в себя множество устройств обнаружения рентгеновского излучения. Каждое из упомянутого множества устройств обнаружения рентгеновского излучения может устанавливать один канал, но один или более вариантов осуществления настоящего изобретения не ограничены этим.
Детектор 108 рентгеновского излучения может обнаруживать рентгеновское излучение, которое сгенерировано генератором 106 рентгеновского излучения и которое передается через объект 10, и может генерировать электрический сигнал, соответствующий интенсивности обнаруженного рентгеновского излучения.
Детектор 108 рентгеновского излучения может включать в себя детектор рентгеновского излучения косвенного типа для обнаружения излучения после преобразования излучения в свет и детектор рентгеновского излучения прямого типа для обнаружения излучения после прямого преобразования излучения в электрические заряды. Детектор рентгеновского излучения косвенного типа может использовать сцинтиллятор. Кроме того, детектор рентгеновского излучения прямого типа может использовать датчик подсчета фотонов. DAS 116 может быть соединена с детектором 108 рентгеновского излучения. Электрический сигнал, сгенерированный детектором 108 рентгеновского излучения, может быть собран DAS 116 проводным или беспроводным способом. Кроме того, электрический сигнал, сгенерированный детектором 108 рентгеновского излучения, может быть передан аналого-цифровому преобразователю (не показан) через усилитель (не показан).
В соответствии с толщиной среза или числом срезов только часть данных, собранных детектором 108 рентгеновского излучения, может быть передана блоку 126 обработки изображений через блок 120 передачи данных, или блок 126 обработки изображений может отобрать только часть данных.
Цифровой сигнал может быть передан блоку 126 обработки изображений через блок 120 передачи данных. Цифровой сигнал может быть передан блоку 126 обработки изображений проводным или беспроводным способом.
Блок 118 управления может управлять функционированием каждого из модулей в томографической системе 100. Например, блок 118 управления может управлять функционированием стола 105, блока 110 привода вращения, коллиматора 112, DAS 116, памяти 124, блока 126 обработки изображений, блока 128 ввода, устройства отображения 130, коммуникатора 132, и т.д.
Блок 126 обработки изображений может принимать данные, например, чистые данные перед обработкой, которые были получены из DAS 116 через блок 120 передачи данных, и может выполнять предварительную обработку.
Предварительная обработка может включать в себя процесс коррекции нерегулярности чувствительности между каналами и процесс корректирования потерь сигнала вследствие быстрого снижения силы сигнала или из-за поглощающего рентгеновское излучение материала, такого как металл и т.д.
Выходные данные от блока 126 обработки изображений могут называться данными проецирования или исходными данными. Данные проецирования могут храниться в памяти 124 вместе с условиями визуализации, например, напряжением на лампе, углом визуализации, и т.д., во время получения данных.
Данные проецирования могут представлять собой группу значений данных, соответствующих интенсивности рентгеновского излучения, проходящего через объект 10. Для удобства описания предполагается, что группа из множества фрагментов данных проецирования, одновременно полученных из всех каналов в одном и том же положении визуализации, называется набором данных проецирования.
Память 124 может включать в себя по меньшей мере один носитель данных из числа носителя данных типа флэш-памяти, носителя данных типа жесткого диска, мультимедийного носителя данных типа микрокарты, памяти типа карты, такой как SD-карта, память XD, и т.д., памяти с произвольным доступом (RAM), статической памяти с произвольным доступом (SRAM), постоянной памяти (ROM), электрически стираемой программируемой ROM (EEPROM), программируемой ROM (PROM), магнитной памяти, магнитного диска и оптического диска.
Блок 126 обработки изображений может реконструировать изображение поперечного сечения в отношении объекта 10 посредством использования полученного набора данных проецирования. Изображение поперечного сечения может являться 3D-изображением. Другими словами, блок 126 обработки изображений может реконструировать 3D-изображение объекта 10 посредством применения способа реконструкции конусообразного луча и т.д., на основании полученного набора данных проецирования.
Блок 128 ввода может принимать внешний ввод в отношении условий рентгеновской томографической визуализации, условий обработки изображений, и т.д. Например, условия рентгеновской томографической визуализации могут включать в себя напряжения на лампах, установку значения энергии в отношении множества рентгеновских пучков, выбор протокола визуализации, выбор способа реконструкции изображения, установку области сканирования, числа срезов, толщины срезов, установку параметров в отношении последующей обработки изображений, и т.д. Кроме того, условия обработки изображений могут включать разрешение изображения, установку коэффициента ослабления в отношении изображения, установку соотношения объединения изображений, и т.д.
Блок 128 ввода может содержать устройство для приема заранее заданного ввода из внешнего источника. Например, блок 128 ввода может содержать микрофон, клавиатуру, мышь, джойстик, сенсорную клавиатуру, сенсорное перо, устройство распознавания голоса, устройство распознавания жестов, и т.д.
Устройство отображения 130 может отображать рентгеновское изображение, реконструированное блоком 126 обработки изображений.
Обмены данными, питанием, и т.д. между указанными выше элементами могут быть выполнены посредством использования по меньшей мере одной из проводной связи, беспроводной связи и оптической связи.
Коммуникатор 132 может осуществлять коммуникацию с внешним устройством, внешним медицинским аппаратом, и т.д. через сервер 134, и т.д. Коммуникация будет теперь описана в отношении фиг. 4.
Фиг. 5 представляет собой диаграмму, иллюстрирующую структуру коммуникатора 132.
Коммуникатор 132 может быть проводным или беспроводным способом соединенным с сетью 301, и поэтому может осуществлять коммуникацию с сервером 134, внешним медицинским аппаратом 136 или внешним портативным устройством 138. Коммуникатор 132 может обмениваться данными с сервером больницы или другими медицинскими устройствами в больнице, соединенными через систему архивации и передачи изображений (PACS).
Кроме того, коммуникатор 132 может выполнять обмен данными с внешним устройством, и т.д., согласно стандарту формирования цифровых изображений и обмена ими в медицине (DICOM).
Коммуникатор 132 может передавать и принимать данные, относящиеся к диагностике объекта 10, через сеть 301. Кроме того, коммуникатор 132 может передавать и принимать медицинское изображение, полученное от медицинского аппарата 136, такого как аппарат магнитно-резонансной визуализации (МРТ), рентгеновский аппарат, и т.д.
Кроме того, коммуникатор 132 может принимать историю диагностики или график медицинского лечения для пациента от сервера 134 и может использовать историю диагностики или график медицинского лечения в клинической диагностике для пациента. Кроме того, коммуникатор 132 может выполнять обмен данными не только с сервером 134 или медицинским аппаратом 136 в больнице, но также и с портативным устройством 138 пользователя или пациента.
Кроме того, коммуникатор 132 может передавать информацию об ошибке устройства, информацию о статусе контроля качества, и т.д. системному администратору или менеджеру по сервису через сеть 301, и может получать обратную связь, соответствующую информации.
Фиг. 6 представляет собой блок-схему, иллюстрирующую томографический аппарат 600 согласно одному из вариантов осуществления настоящего изобретения.
Обратимся к фиг. 6; томографический аппарат 600 согласно настоящему варианту осуществления включает в себя получатель 610 данных и реконструктор 620 изображений.
Томографический аппарат 600 может быть включен в томографическую систему 100, которая описана в отношении фиг. 3 и 4. Кроме того, томографический аппарат 600 может быть включен в медицинский аппарат 136 или портативное устройство 138 и может функционировать, будучи подсоединенным к томографической системе 100.
Подробно, томографический аппарат 600 может представлять собой все аппараты медицинской визуализации, которые реконструируют изображения путем использования данных, полученных посредством применения пучка света, проходящего через объект. Другими словами, томографический аппарат 600 может представлять собой все аппараты медицинской визуализации, реконструирующие изображения с использованием данных проецирования, полученных посредством применения пучка света, проходящего через объект. Подробно, томографический аппарат 600 может представлять собой аппарат компьютерной томографии (КТ), оптической когерентной томографии (OCT) или PET-КТ систему. Соответственно, томографическое изображение, полученное томографическим аппаратом 600 согласно настоящему варианту осуществления, может представлять собой КТ-изображение, OCT-изображение или PET-изображение. На чертежах, которые рассматриваются в приведенном ниже описании, КТ-изображение иллюстрируется как томографическое изображение. Кроме того, томографический аппарат 500 может представлять собой МРТ аппарат.
Кроме того, в случае, когда томографический аппарат 600 включен в томографическую систему 100, описанную в отношении фиг. 1, получатель 610 данных и реконструктор 620 изображений, проиллюстрированный на фиг. 6, могут быть включены в блок 126 обработки изображений с фиг. 4.
Получатель 610 данных получает первую информацию, указывающую движение объекта, в соответствии с промежутком времени, посредством выполнения томографического сканирования объекта 10. Объект может являться заранее заданным органом. Подробно, примеры объекта могут включать в себя по меньшей мере одно из сердца, брюшной полости, матки, мозга, груди и печени. Например, объект может являться сердцем, которое представлено своей поверхностью. Сердце может содержать по меньшей мере одну из тканей, имеющих различные значения яркости в заранее заданной области.
Кроме того, получатель 610 данных может получать исходные данные посредством выполнения томографического сканирования при вращении вокруг объекта менее чем на один оборот. Исходные данные могут представлять собой данные проецирования, полученные посредством проецирования излучения, такого как рентгеновское излучение, в направлении объекта, или синограмму, которая представляет собой группу данных проецирования. Кроме того, исходные данные могут представлять собой изображение, сгенерированное посредством выполнения обратного проецирования с фильтрацией на данных проецирования или синограмме. Подробно, когда генератор 106 рентгеновского излучения в заранее заданном положении проецирует рентгеновское излучение в направлении объекта, точка наблюдения или направление, в котором генератор 106 рентгеновского излучения обращен к объекту, называется проекцией. Данные проецирования обозначают исходные данные, полученные в соответствии с проекцией, а синограмма обозначает исходные данные, полученные посредством последовательного указания множества фрагментов данных проецирования.
Подробно, когда генератор 106 рентгеновского излучения испускает конический пучок при вращении вокруг объекта, который двигается, получатель 610 данных может получать исходные данные, соответствующие коническому пучку, и может преобразовывать полученные исходные данные в исходные данные, соответствующие параллельному пучку, путем перегруппировки полученных исходных данных. Первая информация может быть получена посредством использования исходных данных, соответствующих параллельному пучку. При этом конический пучок преобразуется в параллельный пучок, что называется перегруппировкой, и первая информация может быть получена посредством использования исходных данных, соответствующих параллельному пучку. Перегруппировка конического пучка ниже описана подробно в отношении фиг. 10.
Подробно, получатель 610 данных получает данные в первом угловом сечении, соответствующем первому времени, и втором угловом сечении, соответствующем второму времени и находящемся напротив первого углового сечения, посредством выполнения томографического сканирования объекта, который двигается, и получает первое изображение и второе изображение с использованием данных, полученных в каждом из первого и второго угловых сечений.
Реконструктор 620 изображений реконструирует целевое изображение, представляющее объект в целевое время, на основании первой информации.
Первая информация обозначает величину движения объекта согласно промежутку времени. Подробно, первая информация может обозначать движение поверхности, формирующей объект, в некоторый момент времени. Первая информация подробно описана ниже в отношении фиг. 13.
Подробно, получатель 610 данных получает первое изображение посредством использования исходных данных, полученных в течение первого углового сечения, соответствующего первому времени, и второе изображение посредством использования исходных данных, полученных в течение второго углового сечения, соответствующего второму времени и имеющего отношение парного угла с первым угловым сечением (то есть, угол второго углового сечения и угол первого углового сечения являются парными углами). В данном описании термин «первое угловое сечение» или «второе угловое сечение» обозначает частичное угловое сечение, включенное в угловое сечение за один цикл, который составляет менее одного оборота поворотом. Подробно, каждое из первого и второго углового сечения может иметь значение, меньшее 180. Кроме того, первые и вторые изображения являются частичными изображениями. Получатель 610 данных получает информацию, указывающую движение объекта, посредством использования первых и вторых изображений. Подробно, получатель 610 данных получает первую информацию, указывающую величину движения объекта во время периода между первым временем и вторым временем. Величина движения может представлять собой различие в по меньшей мере одном из формы, размера и положения между заранее заданным объектом, включенным в первое изображение, и заранее заданным объектом, включенным во второе изображение, сгенерированном вследствие движения объекта.
Первая информация ниже описана подробно в отношении фиг. 12 и 13.
Реконструктор 620 изображений может реконструировать целевое изображение, указывающее объект в целевое время. Целевое время может быть установлено непосредственно реконструктором 620 изображения или на основании заранее заданного значения, введенного пользователем. Кроме того, целевое время может являться временем между первым и вторым временем. Установка целевого времени пользователем подробно описана ниже в отношении фиг. 30.
Подробное функционирование томографического аппарата 600 подробно описано ниже в отношении фиг. 7-19.
Фиг. 7 представляет собой блочную диаграмму, иллюстрирующую томографический аппарат 700 согласно другому варианту осуществления настоящего изобретения;
Поскольку получатель 710 данных и реконструктор 720 изображения с фиг. 7 идентично соответствуют получателю данных 610 и реконструктору 620 изображений с фиг. 6, то их избыточные описания опущены.
Обратимся к фиг. 7; томографический аппарат 700 может включать в себя получатель 710 данных и реконструктор 720 изображений. Кроме того, томографический аппарат 700 может дополнительно включать в себя по меньшей мере одно из «гантри» 730, устройства отображения 740, пользовательского интерфейса 750, памяти 760 и коммуникатора 770. Поскольку «гантри» 730, устройство отображения 740, пользовательский интерфейс 750, память 760 и коммуникатор 770, которые включены в томографический аппарат 700, соответственно, имеют те же операции и структуры, что и «гантри» 102, устройство отображения 130, блок 128 ввода, память 124 и коммуникатор 132 из томографической системы 100 с фиг. 4, то их избыточные описания опущены.
Получатель 710 данных выполняет томографическое сканирование объекта и получает первую информацию, указывающую движение объекта согласно промежутку времени.
Подробно, получатель 710 данных выполняет томографическое сканирование объекта и получает первое изображение, соответствующее первому времени, и второе изображение, соответствующее второму времени. Получатель 710 данных получает первую информацию, указывающую зависимость между величиной движения объекта и временем на основании величины движения между первым изображением и вторым изображением. Первое изображение и второе изображение могут являться изображениями, реконструированным согласно способу частичной угловой реконструкции (PAR). Подробно, поскольку первое изображение и второе изображение являются изображениями, реконструированными посредством использования только исходных данных, полученных в угловом сечении, то первое изображение и второе изображение являются не полными изображениями, показывающими весь объект, а неполными изображениями, показывающими только часть объекта. Кроме того, неполное изображение, показывающее часть объекта, такое как первые и вторые изображения, может называться «частичным изображением» или «частичным угловым изображением».
Первое время соответствует моменту времени, когда получают исходные данные для реконструкции первого изображения, а второе время соответствует времени, когда получают исходные данные для реконструкции второго изображения. Например, когда первое изображение реконструировано посредством использования исходных данных, которые были получены для реконструкции первого изображения в течение временного цикла от 0 до времени «a», первое время может являться временем «a/2», которое соответствует середине цикла времени от 0 до времени «a». Кроме того, когда второе изображение реконструировано посредством использования исходных данных, которые были получены для реконструкции второго изображения в течение цикла времени от времени «b» до времени «c», второе время может являться временем «(c+b)/2», которое соответствует середине цикла времени от времени «b» до времени «c».
Кроме того, первое изображение указывает объект в первое время, а второе изображение указывает объект во второе время.
Реконструктор 720 изображения реконструирует целевое изображение, показывающее объект в целевое время, на основании первой информации. Подробно, реконструктор 720 изображения реконструирует целевое изображение посредством коррекции движения объекта на основании первой информации. Подробно, реконструктор 720 изображения может реконструировать целевое изображение путем деформирования изображения, указывающего объект, сетки изображения для отображения объекта или воксела, указывающего объект.
Термин «деформирование» означает настройку объекта, включенного в изображение, для подгонки к состоянию ожидаемого объекта через изменение состояния объекта, включенного в изображение, такое как расширение, сжатие, перемещение и/или изменение формы. Операция реконструкции изображения реконструктора 720 изображения ниже описана подробно в отношении фиг. 13-31.
«Гантри» 730 может содержать генератор 106 рентгеновского излучения с фиг. 4, детектор 108 рентгеновского излучения с фиг. 4 и DAS 116 с фиг. 4. «Гантри» 730 проецирует рентгеновское излучение в направлении объекта, обнаруживает пучок рентгеновского излучения, передаваемый через объект, и генерирует исходные данные, соответствующие обнаруженному рентгеновскому пучку.
Подробно, генератор 106 рентгеновского излучения генерирует и проецирует рентгеновское излучение в направлении объекта при вращении вокруг объекта. Затем детектор 108 рентгеновского излучения обнаруживает рентгеновский пучок, передаваемый через объект. DAS 116 генерирует исходные данные, соответствующие обнаруженному рентгеновскому пучку.
В приведенном ниже описании реконструкция одного томографического изображения поперечного сечения посредством использования исходных данных, полученных при вращении генератора 106 рентгеновского излучения на половину оборота или более, и менее чем на один оборот, называется способом половинной реконструкции, а реконструкция одного томографического изображения поперечного сечения посредством использования исходных данных, полученных при вращении генератора 106 рентгеновского излучения на один оборот, называется способом полной реконструкции. Кроме того, в приведенном ниже описании время, угол или фаза вращения генератора 106 рентгеновского излучения, который вращается для получения исходных данных, необходимых для реконструкции одного томографического изображения поперечного сечения, называется «одним циклом». Кроме того, термин «угловое сечение за один цикл» может обозначать угловое сечение, в течение которого генератор 106 рентгеновского излучения вращается для получения исходных данных, необходимых для реконструкции одного томографического изображения поперечного сечения. Кроме того, угловое сечение за один цикл может обозначать секцию данных проецирования, необходимых для реконструкции одного томографического изображения поперечного сечения. В этом случае оно может называться угловым сечением за один цикл данных проецирования.
Например, один цикл в способе половинной реконструкции может составлять 180 градусов или более, а один цикл в способе полной реконструкции может составлять 360 градусов. Например, угловое сечение за один цикл данных проецирования в способе половинной реконструкции, в котором используется перегруппированный параллельный пучок, может составлять угол 180+угол веерного пучка за счет добавления угла веерного пучка к 180 градусам. Например, когда угол веерного пучка составляет примерно 60, угловое сечение за один цикл данных проецирования в способе половинной реконструкции может составлять примерно 240 (180+60) градусов. Кроме того, угловое сечение за один цикл в способе полной реконструкции может составлять 420 (360+60) градусов за счет добавления угла веерного пучка к 360°.
Подробно, первое время и второе время могут быть временами или угловыми положениями, включенными в один цикл. Кроме того, первое изображение и второе изображение могут являться изображениями, реконструированными, соответственно посредством использования исходных данных, полученных в первом угловом сечении и втором угловом сечении, отличающемся от первого углового сечения, которые включены в угловое сечение за один цикл.
Устройство отображения 740 отображает заранее заданный экран. Подробно, устройство отображения 740 может отображать экран пользовательского интерфейса, необходимый для выполнения томографического сканирования или реконструкции томографического изображения. Экран пользовательского интерфейса, отображенный на устройстве отображения 740, подробно описан ниже в отношении фиг. 29-31.
Пользовательский интерфейс 750 генерирует и выводит данные пользовательского интерфейса и принимает ввод заранее заданной команды или данных от пользователя через экран пользовательского интерфейса. Кроме того, выходные данные экрана пользовательского интерфейса от пользовательского интерфейса 750 выводятся на устройство отображения 740. Затем устройство отображения 740 может отобразить экран пользовательского интерфейса. Пользователь может распознавать заранее заданную информацию или ввести заранее заданную команду или данные через экран пользовательского интерфейса, отображаемый на устройстве отображения 740.
Например, пользовательский интерфейс 750 может включать в себя устройство ввода, такое как мышь, клавиатура или аппаратные кнопки для ввода заранее заданных данных. Например, пользователь может ввести заранее заданную команду или данные путем манипулирования по меньшей мере одним из мыши, клавиатуры или других устройств ввода, включенных в пользовательский интерфейс 750.
Кроме того, пользовательский интерфейс 750 может быть сформирован как сенсорная клавиатура. Подробно, пользовательский интерфейс 750 может включать сенсорную клавиатуру (не показана), которая соединяется с индикаторной панелью (не показана), включенной в устройство отображения 740, и может выводить экран пользовательского интерфейса на индикаторной панели. Затем, когда заранее заданная команда вводится через экран пользовательского интерфейса, сенсорная клавиатура распознает ввод и может распознать ввод заранее заданной команды пользователем.
Подробно, когда пользовательский интерфейс 750 сформирован как сенсорная клавиатура, при касании пользователем заранее заданного места на экране пользовательского интерфейса, пользовательский интерфейс 750 распознает место касания и может передавать информацию о месте касания реконструктору 720 изображений. Затем реконструктор 720 изображений может распознать запрос или команду пользователя, соответствующую меню, показанному в положении касания, и может выполнить операцию реконструкции томографического изображения согласно распознанному запросу или команде.
В памяти 760 могут храниться данные, полученные согласно томографическому сканированию. Подробно, в памяти 760 может храниться по меньшей мере одни из данных проецирования, которые являются исходными данными и синограммой. Кроме того, в памяти 760 могут храниться различные фрагменты данных или программ, необходимые для реконструкции томографического изображения, и может храниться итоговое реконструированное томографическое изображение. Кроме того, в памяти 760 могут храниться различные фрагменты данных, необходимые для получения первой информации, и полученная первая информация.
Кроме того, память 760 может включать в себя по меньшей мере один носитель данных из числа носителя данных типа флэш-памяти, носителя данных типа жесткого диска, мультимедийного носителя данных типа микрокарты, памяти типа карты, такой как SD-карта, память XD, и т.д., памяти с произвольным доступом (RAM), статической памяти с произвольным доступом (SRAM), постоянной памяти (ROM), электрически стираемой программируемой ROM (EEPROM), программируемой ROM (PROM), магнитной памяти, магнитного диска и оптического диска.
Коммуникатор 770 может взаимодействовать с внешним устройством или внешним медицинским аппаратом. Например, коммуникатор 770 соединен с внешней томографической системой или томографическим аппаратом, и может принимать первое изображение и второе изображение. Также коммуникатор 770 может принимать исходные данные для реконструкции первого изображения и второго изображения. В этом случае получатель 710 данных может принимать первое изображение и второе изображение или исходные данные для реконструкции первого изображения и второго изображения, через коммуникатор 770, и может получать первую информацию на основании принятых данных.
Томографические аппараты 600 и 700 согласно вариантам осуществления настоящего изобретения могут применяться для всех способов из способа PAR, способа полной реконструкции и способа половинной реконструкции. Кроме того, в томографических аппаратах 600 и 700 согласно вариантам осуществлениям настоящего изобретения множество режимов сканирования применяется для получения первого изображения и второго изображения. Кроме того, в томографических аппаратах 600 и 700 согласно настоящим вариантам осуществления может быть применена томография согласно обоим способам из способа осевого сканирования и способа винтового сканирования. Кроме того, в томографических аппаратах 600 и 700 согласно вариантам осуществления настоящего изобретения может использоваться генератор 106 рентгеновского излучения, который генерирует рентгеновское излучение, имеющее множество форм, таких как форма конуса или параллельная форма.
В случае, когда объект является объектом, который двигается, таким как сердце, артефакты движения, существующие на реконструированном томографическом изображении, могут быть уменьшены посредством получения исходных данных при сокращении времени или угла, соответствующих одному циклу. Соответственно, способ половинной реконструкции может сократить артефакты движения лучше, чем способ полной реконструкции. Соответственно, в приведенном ниже описании описан случай, в котором способ половинной реконструкции применяется для реконструкции целевого изображения.
Способ реконструкции изображения, режим сканирования и форма рентгеновского излучения, проецируемого на объект, которые применимы к томографическим аппаратам 600 и 700 согласно одному из вариантов осуществления настоящего изобретения, описаны ниже в отношении фиг. 8-10.
Фиг. 8А и 8B являются представлениями для описания реконструкции томографического изображения согласно способу половинной реконструкции. Подробно, фиг. 8A иллюстрирует вращение генератора 106 рентгеновского излучения. Фиг. 8B является томографическим изображением, реконструированным посредством способа половинной реконструкции.
В случае, когда генератор 106 рентгеновского излучения проецирует конический пучок, имеющий форму веера в заранее заданном положении, генератор 106 рентгеновского излучения выполняет томографическое сканирование при вращении на угол, эквивалентный углу 180+(угол 2 веерного пучка) в способе половинной реконструкции, и может реконструировать томографическое изображение посредством использования исходных данных, полученных под углом 180+(угол 2 веерного пучка). Кроме того, в случае, когда операция реконструкции выполняется путем преобразования веерного пучка в параллельный пучок, или когда генератор 106 рентгеновского излучения проецирует параллельный пучок, томографическое изображение может быть реконструировано посредством использования исходных данных, соответствующих угловому сечению, имеющему угол 180+угол веерного пучка в способе половинной реконструкции. Другими словами, когда используется конический пучок, количество исходных данных возрастает с увеличением угла веерного пучка по сравнению со случаем реконструкции томографического изображения с помощью исходных данных, полученных посредством использования параллельного пучка.
Подробно, когда пучок является не коническим пучком, а параллельным пучком, как описано на фиг. 10B, угол для дополнительного вращения уменьшается до значения, меньшего, чем угол веерного пучка «a» для случая конического пучка, и генератор 106 рентгеновского излучения вращается на угол 180+a за один цикл. Например, когда угол веерного пучка равен 60, исходные данные, полученные в угловом сечении 300 (180+2a), являются необходимыми для случая использования конического пучка, а исходные данные, полученные в угловом сечении 240 (180+a), являются необходимыми для случая использования параллельного пучка. Соответственно, когда используется параллельный пучок, способ половинной реконструкции может быть выполнен под углом 240 (180+a) за один цикл.
Фиг. 8A иллюстрирует случай использования параллельного пучка, в котором способ половинной реконструкции выполняется посредством использования исходных данных, полученных в угловом сечении, составляющем, например, 180+угол веерного пучка.
Обратимся к фиг. 8A; в случае, когда генератор 106 рентгеновского излучения в положении 810 пучка проецирует рентгеновское излучение в направлении объекта 805, детектор 106 рентгеновского излучения обнаруживает рентгеновское излучение в плоскости 820 обнаружения. Положение 810 пучка вращается вокруг объекта 805 как центра на угол 180+a, что является одним циклом. Кроме того, плоскость 820 обнаружения вращается в соответствии с положением 810 пучка. Подробно, положение 810 пучка смещается на 180 от +Y оси до оси Y, и далее смещается на угол веерного пучка, эквивалентный «a», в положение 833.
В способе половинной реконструкции одно томографическое изображение поперечного сечения реконструируют посредством использования фрагментов данных проецирования, полученных в первом «a» угловом сечении 835, промежуточном угловом сечении 837 и последнем «a» угловом сечении 836.
Обратимся к фиг. 8B; проиллюстрировано томографическое изображение 870, которое реконструировано посредством использования исходных данных, полученных посредством способа половинной реконструкции.
Поскольку рентгеновское излучение проецируется в направлении объекта в противоположном направлении в первом «a» угловом сечении 835 и последнем «a» угловом сечении 836, то первое «a» угловое сечение 835 и последнее «a» угловое сечение 836 имеют одну и ту же проекцию. Соответственно, часть объекта, реконструированная с использованием данных проецирования, полученных в первом «a» угловом сечении 835 и часть объекта, реконструированная с использованием данных проецирования, полученных в последнем «a» угловом сечении 836, идентичны друг другу.
Для движущегося объекта в случае, когда данные получены в разное время, даже если данные получены для одной и той же части объекта, получаются разные фрагменты данных вследствие движения объекта. Состояние объекта в первом «a» угловом сечении 835 и состояние объекта в последнем «a» угловом сечении 836 отличаются друг от друга. Соответственно, артефакты движения могут быть сгенерированы наиболее сильно в части объекта, которая изображается с использованием данных проецирования, полученных в первом «a» угловом сечении 835, и данных проецирования, полученных в последнем «a» угловом сечении 836, в которой изображается часть объекта, которая совпадает с частью объекта в первом «a» угловом сечении 835.
Обратимся к фиг. 8B; можно заметить, что артефакты движения сгенерированы в частях 882 и 883 поверхности, указывающих объект на томографическом изображении 870, реконструированном в способе половинной реконструкции.
Однако по сравнению со способом полной реконструкции, способ половинной реконструкции имеет маленькое угловое сечение для получения данных проецирования. Соответственно, на томографическом изображении 870, реконструированном посредством способа половинной реконструкции, артефакты движения могут быть уменьшены по сравнению с томографическим изображением, полученным посредством способа полной реконструкции. Например, по сравнению с наиболее удаленной (от центра) поверхностью 230 объекта 210, который находится на томографическом изображении 200, проиллюстрированном на фиг. 2 и является нечетким, наиболее удаленная (от центра) поверхность 881 объекта 880 на томографическом изображении, 870 с фиг. 8B является менее нечеткой.
Кроме того, можно заметить, что нечеткость уменьшена на внутренних поверхностях 882 и 883 по сравнению с томографическим изображением 200 с фиг. 2, и, таким образом артефакты движения обычно уменьшаются на реконструированном томографическом изображении 870.
Как описано выше, на томографическом изображении 870, реконструированном в способе половинной реконструкции, артефакты движения могут быть уменьшены по сравнению с томографическим изображением, реконструированным в способе полной реконструкции. Другими словами, при уменьшении времени для получения исходных данных, необходимых для реконструкции томографического изображения поперечного сечения, может быть реконструировано изображение с сокращенными артефактами движения. Другими словами, если время для получения исходных данных, необходимых для реконструкции томографических изображений поперечного сечения, сокращается, то временное разрешение может быть увеличено, и может быть уменьшена доза излучения, воздействию которой подвергают пациента. Томографический аппарат согласно настоящему варианту осуществления и способу реконструкции его томографического изображения может применять указанный выше способ полной реконструкции или способ половинной реконструкции.
Соответственно, в целях увеличения временного разрешения в настоящем варианте осуществления, первое изображение, соответствующее первому времени, и второе изображение, соответствующее второму времени, получают посредством применения способа PAR, в котором изображение реконструируют путем получения исходных данных под частичным углом. Первое изображение и второе изображение описаны ниже подробно в отношении фиг. 11.
Кроме того, томографические аппараты 600 и 700 согласно вариантам осуществлениям настоящего изобретения могут получать первое изображение и второе изображение посредством выполнения томографического сканирования согласно множеству режимов сканирования. Режим сканирования, применяемый для томографического сканирования, может включать проспективный режим и ретроспективный режим, описанные подробно ниже в отношении фиг. 9А и 9B. Кроме того, томографические аппараты 600 и 700 согласно настоящим вариантам осуществления могут выполнять томографическое сканирование согласно множеству способов сканирования. Способы сканирования, применяемые в томографии, включают в себя осевой способ сканирования и винтовой способ сканирования, описанные подробно в отношении фиг. 9.
Фиг. 9А и 9B являются представлениями для описания режима сканирования и способа сканирования, применяемых в томографическом сканировании. Подробно, фиг. 9A является представлением для описания томографического сканирования согласно осевому способу сканирования. Кроме того, фиг. 9A является представлением для описания томографического сканирования согласно проспективному режиму. Фиг. 9B является представлением для описания томографического сканирования согласно винтовому способу сканирования. Кроме того, фиг. 9B является представлением для описания томографического сканирования согласно ретроспективному способу. Способ просмотра может быть определен согласно тому, является ли частота сердечных сокращений пациента, подвергающегося визуализации, постоянной или нет. Кроме того, электрокардиографическая (ECG) синхронизация может применяться для получения исходных данных, которые используются для реконструкции изображения. На фиг. 9А и 9B, в течение выполнения томографического сканирования стол 105 с фиг. 4 перемещается в осевом направлении пациента 905.
Обратимся к фиг. 9A; осевой способ сканирования представляет собой способ томографии, в котором рентгеновское излучение проецируется для сканирования в то время, когда стол 105 с фиг. 4 стоит, стол 105 перемещается на заранее заданный интервал от 901 до 902, и рентгеновское излучение проецируется для заранее заданного сечения 922, в результате чего получают исходные данные. Томографические аппараты 600 и 700 согласно настоящим вариантам осуществления выполняют томографическое сканирование посредством применения способа осевого сканирования, и таким образом может быть получено по меньшей мере одно из первого изображения, второго изображения и целевого изображения.
Обратимся к фиг. 9A; для человека, имеющего постоянную частоту сердечных сокращений, ECG-сигнал 910 регулярно синхронизируется путем использования проспективного режима. В проспективном режиме заранее заданное сечение 921 автоматически выбирается в момент времени t3, который отделен от пика R 911 заранее заданным временем. Рентгеновское излучение прилагается к объекту во время синхронизированного заранее заданного сечения 921 для получения исходных данных. Заранее заданное сечение 922 автоматически выбирается в момент времени t4, который отделен от пика R 912 заранее заданным временем. Рентгеновское излучение проецируется для сканирования объекта в то время как стол 105 с фиг. 4 стоит. После того, как стол 105 перемещается на заранее заданный интервал от 901 до 902, рентгеновское излучение проецируется в течение заранее заданного сечения 922 для получения исходных данных. Для способа половинной реконструкции способ выполнения томографического сканирования путем перемещения в осевом направлении объекта, как проиллюстрировано на фиг. 9А, называется осевым способом половинной реконструкции. Томографические аппараты 600 и 700 согласно настоящим вариантам осуществления могут применять осевой способ сканирования.
Получатель 710 данных реконструирует томографические изображения 931 и 932, полученные в синхронизированных сечениях 921 и 922.
Обратимся к фиг. 9B; винтовой способ сканирования представляет собой способ томографии, в котором рентгеновское излучение постоянно проецируется для томографии в то время как стол 105 с фиг. 4 перемещается в заранее заданное время от t=0 до t=конец. Подробно, томографическое сканирование выполняется путем непрерывного проецирования рентгеновского излучения на объект, в то время как стол 105 с фиг. 4, на котором лежит пациент 905, содержащий объект, перемещается в течение заранее заданного времени на заранее заданной скорости. Соответственно, траектория 950 движения из источника рентгеновского излучения может иметь форму спирали.
Обратимся к фиг. 9B; когда частота сердечных сокращений пациента нерегулярна, как в случае пациента с аритмией, регулярность частоты сердечных сокращений ухудшается и, таким образом, невозможно единообразно обнаруживать цикл, как в проспективном режиме. В этом случае ECG-сигнал 960 нерегулярно синхронизируется в ретроспективном режиме. В ретроспективном режиме рентгеновское излучение проецируется на объект во всех циклах ECG-сигналов или в последовательном заранее заданном диапазоне ECG-сигналов с целью получения исходных данных, и затем выбираются частичные циклы для реконструкции томографического изображения. Другими словами, в ретроспективном режиме частичные циклы, используемые пользователем для реконструкции изображения, устанавливаются индивидуально для обнаружения частичных циклов 961, 962, и 963, и затем исходные данные, полученные в течение обнаруженных циклов, используются для реконструкции томографического изображения.
В ретроспективном режиме рентгеновское излучение постоянно проецируется с определенного времени t=0 до t=конец, посредством чего выполняется томографическое сканирование. Кроме того, так как стол 105 с фиг. 4 постоянно движется на заранее заданной скорости в течение заранее заданного времени, траектория движения 950 рентгеновского источника света (не показан) имеет форму спирали. Среди способов половинной реконструкции, способ выполнения рентгеновского сканирования посредством непрерывного проецирования рентгеновского излучения, в то время как стол перемещается, как проиллюстрировано на фиг. 9B, называется винтовым способом половинной реконструкции. Томографические аппараты 600 и 700 согласно настоящим вариантам осуществления могут применять винтовой способ половинной реконструкции.
В подробном примере для пациента, имеющего нерегулярную частоту сердечных сокращений, томографическое сканирование может быть выполнено путем применения ретроспективного режима в винтовом способе сканирования. Также, для пациента, имеющего регулярную частоту сердечных сокращений, томографическое сканирование может быть выполнено путем применения проспективного режима в осевом способе сканирования. Однако настоящее изобретение не ограничено указанным, и томографическое сканирование может быть выполнено путем применения проспективного режима к винтовому способу сканирования и ретроспективного режима к осевому способу сканирования.
Фиг. 10А и 10B являются представлениями для описания формы рентгеновского пучка, спроецированного в направлении объекта. Подробно, фиг. 10A иллюстрирует пример, в котором генератор 106 рентгеновского излучения проецирует рентгеновское излучение в форме конического пучка. Фиг. 10B иллюстрирует пример, в котором генератор 106 рентгеновского излучения проецирует рентгеновское излучение в форме параллельного пучка.
Обратимся к фиг. 10A; когда генератор 106 рентгеновского излучения перемещается вдоль траектории 1010 и проецирует рентгеновское излучение в заранее заданном положении 1020, рентгеновское излучение проецируется в направлении объекта в форме конуса 1030, как проиллюстрировано на фиг. 10A.
Обратимся к фиг. 10B; когда генератор 106 рентгеновского излучения перемещается вдоль траектории 1050 и проецирует рентгеновское излучение в заранее заданных положениях 1060, рентгеновское излучение проецируется в направлении объекта в форме параллельной плоскости 1070, как проиллюстрировано на фиг. 10B.
Обратимся к фиг. 10B; когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в форме конического пучка, пучки, проецируемые в форме конуса, перестраиваются, и, таким образом, пучки могут быть перестроены параллельно на плоскости 1080, которая сформирована путем соединения ряда детектора 108 рентгеновского излучения и траектории 1060, в которую помещен генератор 106 рентгеновского излучения. Другими словами, конический пучок может быть преобразован в псевдопараллельный пучок для использования. Кроме того, когда конический пучок преобразуется в параллельный пучок для использования, в коническом пучке исходные данные получают при дополнительном вращении генератора 106 рентгеновского излучения на угол веерного пучка «a» по сравнению с параллельным пучком. Подробно, когда угол веерного пучка равен «a», генератор 106 рентгеновского излучения, который проецирует конический пучок, использует исходные данные, полученные в угловом сечении, имеющем угол 180+2a, для получения исходных данных, соответствующих угловому сечению, имеющему угол 180+a, соответствующему перегруппированному параллельном пучку.
Как описано в отношении фиг. 10, томографические аппараты 600 и 700 согласно настоящим вариантам осуществления могут быть применены как к КТ-аппарату, излучающему конический пучок, так и к КТ-аппарату, излучающему параллельный пучок.
В приведенном ниже описании для удобства объяснения в угловом сечении за один цикл, которое представляет собой угловое сечение, на которое генератор 106 рентгеновского излучения поворачивается для получения данных проецирования, необходимых для получения одного томографического изображения поперечного сечения, угловое сечение, отличное от 180, может называться дополнительным углом. В описанном выше примере в случае, когда используется параллельный пучок, полученный посредством перегруппирования конического пучка, спроецированного от генератора 106 рентгеновского излучения, дополнительный угол может составлять «2a». В случае, когда используется параллельный пучок, дополнительный угол может составлять «a». В случае, когда используется перегруппированный параллельный пучок, данные проецирования, соответствующие угловому сечению, имеющему угол 180+a, получают посредством использования исходных данных, полученных при вращении генератора 106 рентгеновского излучения, который проецирует рентгеновское излучение в форме конического пучка, на угловое сечение, имеющее угол 180+2a.
Кроме того, в предположении, что секция данных проецирования, полученных для реконструкции одного томографического изображения поперечного сечения, является угловым сечением за один цикл, дополнительный угол может выражать угловое сечение, полученное вычитанием 180 из углового сечения за один цикл данных проецирования. В описанном выше примере, когда генератор 106 рентгеновского излучения вращается на угловое сечение, имеющее угол 180+2a, проецируя конический пучок, и данные проецирования, соответствующие угловому сечению, имеющему угол 180+a, получают посредством использования перегруппированного параллельного пучка, угловое сечение за один цикл данных проецирования может составлять 180+a, и дополнительный угол в угловом сечении за один цикл данных проецирования может составлять «a».
В томографическом аппарате 700 согласно настоящему варианту осуществления способ PAR реконструкции изображения посредством использования исходных данных, полученных в частичном угловом сечении, применяется для получения первого изображения и второго изображения. Подробно, первое изображение и второе изображение могут являться изображениями, реконструированными посредством использования исходных данных, полученных в первом угловом сечении и втором угловом сечении, которые включены в угловое сечение за один цикл и которые являются отличными друг от друга сечениями. Получение первого изображения и второго изображения в соответствии с частичной реконструкцией подробно описано ниже в отношении фиг. 11 и 12.
Поскольку генератор 106 рентгеновского излучения вращается на постоянной скорости и выполняет томографическое сканирование, угловое значение пропорционально временному значению. Соответственно, когда значение заранее заданного углового сечения уменьшается, время, проведенное для получения исходных данных в заранее заданном угловом сечении, уменьшается. Таким образом, в способе PAR при уменьшении углового сечения, используемого для реконструкции частичного углового изображения, временное разрешение может быть увеличено. Таким образом, первые и вторые изображения, которые являются частичными угловыми изображениями, представляют собой изображения, имеющие высокое временное разрешение, в котором артефакты движения почти не существуют. Первые и вторые изображения могут точно показать часть объекта при отсутствии нечеткости.
Фиг. 11 является представлением для описания функционирования томографического аппарата 700 согласно одному из вариантов осуществления настоящего изобретения.
В приведенном ниже описании случай выполнения томографического сканирования при вращении генератора 106 рентгеновского излучения на угол 180+дополнительный угол в качестве углового сечения за один цикл посредством применения способа половинной реконструкции, описанного на фиг. 8, описан в качестве примера. Как описано выше, в способе половинной реконструкции дополнительный угол, который является угловым сечением, отличным от 180, может изменяться в соответствии с по меньшей мере одним из формы пучка, спецификации системы томографии и технических характеристик генератора 106 рентгеновского излучения.
В приведенном ниже описании случай использования перегруппированного параллельного пучка описан в качестве примера. Соответственно, случай, в котором генератор 106 рентгеновского излучения вращается на угловое сечение, имеющее угол 180+2a, и проецирует конический пучок, получатель 710 данных получает исходные данные, например, данные проецирования, соответствующие угловому сечению, имеющему угол 180+a, с использованием данных, полученных при вращении генератора 106 рентгеновского излучения на угловое сечение, имеющее угол 180+2a, описан в качестве примера. Кроме того, на чертежах и в подробных описаниях, которые будут рассмотрены, случай, в котором угловое сечение за один цикл имеет угол 180+угол веерного пучка, то есть, 180+a, и дополнительный угол является углом веерного пучка, т.е. «a», в соответствии с угловым сечением данных проецирования, полученных посредством использования перегруппированного параллельного пучка, описан и проиллюстрирован в качестве примера.
Обратимся к фиг. 11; угловое сечение 1120 за один цикл может иметь угол 180+дополнительный угол, который является суммой 180 1130, (a/2) 1141 и (a/2) 1145. Кроме того, конкретное значение угла веерного пучка «a» может изменяться в соответствии с системой томографии или техническими характеристиками генератора 106 рентгеновского излучения, и может составлять, например, примерно 50-60°.
Подробно, первое угловое сечение 1142 и второе угловое сечение 1146 являются угловыми сечениями, включенными в угловое сечение 1120 за один цикл, и могут являться парными углами, которые находятся напротив друг друга. Разность по углу между первым угловым сечением 1142 и вторым угловым сечением 1146 в отношении парного угла составляет 180.
Подробно, как проиллюстрировано на фиг. 11, первое угловое сечение 1142 может являться начальным сечением углового сечения 1120 за один цикл, а второе угловое сечение 1146 может являться конечным сечением углового сечения 1120 за один цикл.
В случае, когда первое угловое сечение 1142 и второе угловое сечение 1146 имеют отношение парного угла, поскольку проекции в соответствии с первым угловым сечением 1142 и вторым угловым сечением 1146, являются идентичными друг другу, то поверхность объекта 1110, обнаруживаемая, когда изображение объекта 1110 захватывают в первом угловом сечении 1142, и поверхность объекта 1110, обнаруживаемая, когда изображение объекта 1110 захватывают во втором угловом сечении 1146, являются идентичными друг другу.
Например, «a» на фиг. 11 может составлять 60 (a=60), а исходные данные, соответствующие угловому сечению 60, получают при вращении генератора 106 рентгеновского излучения. Соответственно, первое изображение и второе изображение получают посредством использования исходных данных, полученных в первом угловом сечении 1142, которое является первым сечением на 60, и втором угловом сечении 1146, которое является последним сечением на 60.
Поскольку генератор 106 рентгеновского излучения вращается на постоянной скорости и выполняет томографическое сканирование, угловое значение пропорционально временному значению. Соответственно, когда значение заранее заданного углового сечения уменьшается, время, затрачиваемое на получение исходных данных в заранее заданном угловом сечении, уменьшается.
Как описано выше, в томографическом аппарате 700 применяется способ PAR, в котором первое изображение и второе изображение получают посредством использования исходных данных, полученных в первом угловом сечении 1142 и втором угловом сечении 1146, которые являются частичными сечениями, включенными в угловое сечение за один цикл. Другими словами, поскольку томографический аппарат 700 реконструирует изображение посредством использования относительно малого углового сечения по сравнению со способом половинной реконструкции или способом полной реконструкции, временное разрешение может быть увеличено, а артефакты движения могут быть уменьшены. Кроме того, в настоящем варианте осуществления, поскольку величину движения объекта измеряют посредством использования первого изображения и второго изображения, которые являются частичными угловыми изображениями, величина движения объекта может быть измерена более точно.
Поскольку изображение сгенерировано путем выполнения коррекции движения на объекте в целевое время посредством использования первой информации, которая является информацией о движении, содержащей точно измеренную величину движения, то реконструированное целевое изображение может иметь высокое временное разрешение и уменьшенные артефакты движения. Томографический аппарат согласно настоящему варианту осуществления и способ реконструкции его томографического изображения, которые могут уменьшить артефакты движения и увеличить временное разрешение, подробно описаны ниже в отношении фиг. 12-25.
Фиг. 12 является представлением для описания функционирования томографического аппарата 700 согласно одному из вариантов осуществления настоящего изобретения.
Обратимся к фиг. 12; угол 180+a установлен в качестве углового сечения 1210 за один цикл, а исходные данные, необходимые для реконструкции первого изображения и второго изображения, получают в первом угловом сечении 1211 и втором угловом сечении 1212, которые включены в угловое сечение 1210 за один цикл и имеют отношение парного угла. Подробно, первое угловое сечение 1211 может являться начальным сечением углового сечения 1210 за один цикл, а второе угловое сечение 1212 может являться конечным сечением углового сечения 1210 за один цикл.
Подробно, генератор 106 рентгеновского излучения выполняет томографическое сканирование при вращении вокруг объекта 1201, посредством чего осуществляется получение данных проецирования, синограммы и т.д., которые являются исходными данными, соответствующими первому угловому сечению 1211. Соответственно, томографическое изображение 1231 реконструируют посредством использования полученных исходных данных.
Исходные данные, полученные в первом угловом сечении 1211 и втором угловом сечении 1212, могут являться данными, полученными путем обнаружения рентгеновского излучения, спроецированного в направлении объекта из одиночного источника или двойного источника. Например, в случае, когда томографическое сканирование выполняется посредством использования одиночного источника, томографическое сканирование может быть выполнено посредством перемещения одиночного источника в первом угловом сечении 1211 и втором угловом сечении 1212.
В другом примере, когда томографическое сканирование выполняется посредством использования двойного источника, томографическое сканирование может быть выполнено посредством перемещения по меньшей мере одного из первого источника и второго источника, включенных в двойной источник, в по меньшей мере одном из первого углового сечения 1211 и второго углового сечения 1212. Подробно, исходные данные могут быть получены при вращении первого источника в первом угловом сечении 1211, и исходные данные могут быть получены при вращении второго источника во втором угловом сечении 1212. Кроме того, исходные данные могут быть получены при вращении первого источника в первом угловом сечении 1211 или первом угловом сечении 2001 с фиг. 20A, и втором угловом сечении 1212 или втором угловом сечении 2005 с фиг. 10A. Кроме того, исходные данные могут быть получены при вращении второго источника в по меньшей мере частичном угловом сечении углового сечения 1120 за один цикл, за исключением первого углового сечения 1211 и второго углового сечения 1212, например, в по меньшей мере одном из третьего углового сечения 2002, четвертого углового сечения 2003 и пятого углового сечения 2004, которые описаны ниже в отношении фиг. 20A.
При этом различные способы реконструкции могут применяться для реконструкции томографического изображения. Например, в качестве способа реконструкции томографического изображения в томографических аппаратах 600 и 700 может применяться способ обратного проецирования с фильтрацией, итеративный способ и т.д.
Согласно способу обратного проецирования изображение реконструируют посредством обратного проецирования данных проецирования, полученных во множестве проекций, на пиксельную плоскость и суммирования подвергнутых обратному проецированию данных. Подробно, способ обратного проецирования может получать изображение, подобное реальному изображению, посредством использования множества фрагментов данных проецирования во множестве направлений. Кроме того, может быть дополнительно выполнена фильтрация с целью удаления артефактов, существующих на реконструированном изображении, и улучшения качества изображения.
Способ обратного проецирования с фильтрацией является улучшением способа обратного проецирования и удаляет нечеткость или артефакты, которые могут возникнуть в способе обратного проецирования. Согласно способу обратного проецирования с фильтрацией исходные данные подвергаются фильтрации до выполнения обратного проецирования, а отфильтрованные исходные данные подвергаются обратному проецированию, посредством чего реконструируется томографическое изображение.
Способ обратного проецирования с фильтрацией обычно широко применяется для реконструкции томографического изображения, является способом, который может быть легко осуществлен и является эффективным с точки зрения объема вычислений для реконструкции изображения. Способ обратного проецирования с фильтрацией является способом, который математически выполняет обратное преобразование относительно преобразования Радона, которое представляет собой процесс получения синограммы по 2D-изображению. Согласно способу обратного проецирования с фильтрацией, относительно просто расширить 2D-изображение до 3D-изображения. Подробно, в способе обратного проецирования с фильтрацией изображение реконструируют путем выполнения обратного проецирования после фильтрации данных проецирования посредством применения фильтра Шеппа-Логана, который является видом фильтра высоких частот. В приведенном ниже описании случай реконструкции томографического изображения посредством применения способа обратного проецирования с фильтрацией описан в качестве примера.
Обратимся к фиг. 12; получатель 710 данных получает томографическое изображение 1231 посредством выполнения обратного проецирования с фильтрацией на исходных данных, полученных в первом угловом сечении 1211. Подробно, каждое из первого и второго углового сечения 1211 и 1212 имеет значение меньше, чем 180. В целях дальнейшего разъяснения очищения поверхностей 1235 и 1236 на томографическом изображении 1231 томографическое изображение 1231 подвергается фильтрации, в результате чего может быть получено первое изображение 1232, являющееся результатом реконструкции. Подробно, первое изображение 1232 может являться неполным изображением, которое реконструировано посредством способа PAR.
Подробно, когда используется перегруппированный параллельный пучок, а угловое сечение за один цикл данных проецирования составляет 180+a, дополнительный угол «a» может быть установлен как угол веерного пучка. Подробно, первое угловое сечение 1211 и второе угловое сечение 1212, имеющие дополнительный угол «a», могут быть установлены равными примерно 30-70° (градусов).
Подробно, первое угловое сечение 1211 и второе угловое сечение 1212 могут быть установлены равными экспериментально оптимизированному значению для получения первых и вторых изображений, имеющих высокое временное разрешение, и могут быть установлены с учетом временного разрешения первых и вторых изображений, технических характеристик томографического аппарата 700 и/или среды для визуализации. Угловые значения первого углового сечения 1211 и второго углового сечения 1212 и временные разрешения первого изображения 1232 и второго изображения 1242 могут находиться в компромиссном соотношении. Подробно, с уменьшением угловых значений первого углового сечения 1211 и второго углового сечения 1212, временные разрешения первого изображения 1232 и второго изображения 1242 увеличиваются. Однако когда угловые значения первого углового сечения 1211 и второго углового сечения 1212 уменьшаются, часть поверхности объекта, подвергаемая визуализации, уменьшается. Соответственно, с уменьшением угловых значений первого углового сечения 1211 и второго углового сечения 1212 часть поверхности объекта для извлечения величины движения объекта уменьшается и, таким образом, информация о движении может стать относительно неточной.
Соответственно, с учетом временных разрешений первого изображения 1232 и второго изображения 1242 и точности информации о движении, полученной через первое изображение 1232 и второе изображение 1242, угловые значения первого углового сечения 1211 и второго углового сечения 1212 могут быть установлены оптимально.
Получатель 710 данных получает томографическое изображение 1241 путем выполнения обратного проецирования с фильтрацией на исходных данных, полученных во втором угловом сечении 1212. В целях дальнейшего очищения изображений поверхностей 1245 и 1246 на томографическом изображении 1241, томографическое изображение 1241 подвергается фильтрации, в результате чего может быть получено второе изображение 1242, являющееся результатом реконструкции. Подробно, второе изображение 1242 может быть неполным изображением, реконструированным посредством способа PAR.
На фиг. 12 случай реконструкции 2D-томографического изображения, например, первого и второго изображений 1232 и 1242, проиллюстрирован в качестве примера. Объект, представленный как поверхность на 3D-томографическом изображении, может быть представлен как грань, например, грани 1235 и 1236, как на первом и втором изображениях 1232 и 1242, проиллюстрированных на 2D-томографическом изображении.
Как проиллюстрировано на фиг. 12, когда первая информация получена посредством использования только первых и вторых изображений 1241 и 1242, которые являются 2D-томографическими изображениями, степень движения объекта может быть идентифицирована путем сравнения различия на грани. Например, поверхности 1235 и 1245, включенные, соответственно, в первое и второе изображения 1241 и 1242 и показывающие одну и ту же поверхность объекта, сравнивают для получения первой информации.
Кроме того, реконструируют 3D-томографическое изображение, и могут использоваться первые и вторые изображения, которые являются 3D-томографическими изображениями. В случае, когда 3D-томографическое изображение реконструируют из первых и вторых изображений, величина движения объекта может быть идентифицирована путем сравнения различия на грани, как показано на каждом из первого и второго изображений, и путем показа одной и той же поверхности.
Получатель 710 данных может получать первое изображение 1241 и второе изображение 1242 посредством использования исходных данных, полученных посредством применения томографии согласно осевому способу сканирования или винтовому способу сканирования, описанным на фиг. 9A.
Кроме того, первое изображение 1241 и второе изображение 1242 могут называться одной парой частичных изображений.
Получатель 710 данных может получать первое изображение 1241 и второе изображение 1242 посредством применения способа винтового сканирования, описанного в отношении фиг. 9B. В случае, когда применяется способ винтового сканирования, данные проецирования с множества проекций, которые проецируют одну и ту же часть объекта, разделяют на парные проекционные сектора и, таким образом, могут быть получены первое изображение и второе изображение.
Кроме того, когда первое изображение 1241 и второе изображение 1242 называют одной парой частичных изображений, первая информация может быть получена посредством использования множества пар частичных изображений.
Подробно, поскольку фрагменты данных проецирования, соответствующие полной проекции, получают в винтовом способе сканирования, то фрагменты данных проецирования полной проекции разделяют на множество парных проекционных секторов, и таким образом первое изображение и второе изображение могут быть получены в каждом из парных проекционных секторов. Соответственно, может быть получено множество пар частичных изображений, соответствующих парным проекционным секторам. Соответственно, получатель 710 данных может получать первую информацию посредством использования пар частичных изображений. В этом случае движение объекта может быть предсказано более точно для каждого из парных проекционных секторов, включенных в угловое сечение за один цикл первой информации посредством использования пар частичных изображений.
Кроме того, детектор 108 рентгеновского излучения с фиг. 4, содержащий множество 2D-детекторов, в один момент времени получает данные проецирования, соответствующие множеству рядов, и томографическое сканирование выполняется посредством применения способа винтового сканирования, при этом может быть получено множество фрагментов исходных данных для получения пар частичных изображений в одном и том же парном проекционном секторе для визуализации одной и той же позиции или одной и той же части объекта. Например, когда стол движется в направлении оси Z, а томографическое сканирование выполняется в осевом сечении, пары частичных изображений могут быть получены в одном и том же положении оси Z объекта.
В следующем направлении случай, в котором стол перемещается в направлении оси Z и томографическое сканирование выполняется в осевом сечении, как проиллюстрировано на фиг. 9B, описан в качестве примера. Подробно, когда томографическое сканирование выполняется посредством винтового способа сканирования, множество наборов исходных данных может быть получено относительно одного и того же осевого положения на оси Z (далее в настоящем описании называемом одним и тем же z-положением) вследствие движения стола. Например, устанавливают значение шага винта, которое является интервалом движения стола в винтовом способе сканирования, и, таким образом, стол перемещается на интервал k рядов детектора. В этом случае данные проецирования, полученные в i-м ряду детектора при и первом вращении, могут совпасть с данными проецирования, полученными в (i+k)-м ряду детектора при втором вращении после того, как стол переместился на один шаг винта. Второе вращение может являться вращением, следующим после первого вращения. Соответственно, пара частичных изображений может быть получена с использованием данных проецирования, полученных в i-м ряду при первом вращении, и по меньшей мере одна пара частичных изображений может быть получена с использованием данных проецирования, полученных в (i+k)-м ряду при втором вращении после первого вращения.
Альтернативно, в винтовом способе сканирования пара частичных изображений может быть получена с использованием данных проецирования, полученных в i-м ряду, и по меньшей мере одна пара частичных изображений может быть получена путем интерполяции фрагментов данных проецирования, полученных в рядах, граничащих с i-м рядом.
Соответственно, получатель 710 данных может получать множество пар частичных изображений, соответствующих тому же z-положению посредством выполнения томографического сканирования в винтовом способе сканирования. Затем первая информация может быть получена посредством использования пар частичных изображений. Подробно, когда величина движения объекта измеряется посредством использования пар частичных изображений, величина движения объекта может быть более точно измерена по сравнению со случаем измерения величины движения объекта посредством использования одной пары частичных изображений, и, соответственно, может быть получена первая информация, которая является более точной.
В приведенном ниже описании проиллюстрирован случай, в котором первые и вторые изображения 1232 и 1242 являются 2D-томографическими изображениями, как проиллюстрировано на фиг. 12, а поверхность объекта, проиллюстрированная как грань, показанная на первом и втором изображениях, описана в качестве примера.
Обратимся к фиг. 12; первое изображение 1232 и второе изображение 1242 идентично показывают грань, включенную в заранее заданную часть объекта.
Как описано выше, поскольку первое угловое сечение 1211 и второе угловое сечение 1212 имеют отношение парного угла, то и первое изображение 1232 и второе изображение 1242 показывают одну и ту же грань одной и той же части объекта. Соответственно, когда первое изображение 1232 и второе изображение 1242 сравнивают друг с другом, может быть замечено различие между поверхностями одни и тех же частей объекта, включенными в первое изображение 1232 и второе изображение 1242, и может быть определена степень движения объекта. В случае, когда движущийся объект должен подвергнуться томографическому сканированию, по меньшей мере одно из размера, положения и формы объекта, включенного в первое изображение 1232, отличается от данного параметра у объекта, включенного во второе изображение 1242, вследствие движения объекта.
Также, подробно, движение объекта в направлении, например, в направлении оси X, перпендикулярное направлению, например, направлению 1215, в котором рентгеновское излучение проецируется в направлении объекта в первом угловом сечении 1211 и втором угловом сечении 1212, может быть более точно идентифицировано, чем в другом направлении (проекции).
Кроме того, когда используются исходные данные, полученные в угловом сечении, имеющем относительно маленький угол, например, a=60, в отличие от способа половинной реконструкции или способа полной реконструкции, то поскольку информацию о движении объекта получают посредством использования первого изображения 1232 и второго изображения 1242, имеющих высокое временное разрешение и меньше артефактов движения, то величина движения объекта между первым временем и вторым временем может быть измерена точно.
Получатель 710 данных получает первую информацию, указывающую движение объекта согласно промежутку времени на основании величины движения между первым изображением 1232 и вторым изображением 1242. Операция получения первой информации ниже описана подробно в отношении фиг. 13.
Фиг. 13А, 13B, и 13C являются представлениями для описания движения объекта. Подробно, фиг. 13A является представлением для описания сравнения движения между первым изображением и вторым изображением. Фиг. 13B является представлением для описания величины движения между первым изображением и вторым изображением. Фиг. 13C является представлением для описания первой информации.
Обратимся к фиг. 13A; первое изображение 1310 и второе изображение 1320 являются частичными изображениями, идентичными первому изображению 1232 и второму изображению 1242 с фиг. 12. Однако для удобства объяснения, случай, в котором первое изображение 1310 и второе изображение 1320 являются полными изображениями, описан в качестве примера.
Первое изображение 1310 и второе изображение 1320 являются томографическими изображениями, схематично иллюстрирующими движущийся объект посредством захвата его изображений. Кроме того, на фиг. 13A по меньшей мере один из объектов 1311 и 1312, или 1321 и 1322, включенных в одно изображение, показан как круглый объект.
Подробно, для сравнения величин движений объектов, объекты 1311 и 1312, включенные в первое изображение 1310, сравнивают с объектами 1321 и 1322, включенными во второе изображение 1320. В соответствии с результатом сравнения, может быть получена величина движения каждого из объектов, как проиллюстрировано на сравнительном изображении 1330.
Обратимся к фиг. 13B; поверхности, указывающие одни и те же части объектов, включенных в первые и вторые изображения, 1310 и 1320, сравнивают друг с другом, и таким могут быть получены образом векторы движения, указывающие значения различий положений и направления между сравниваемыми поверхностями. Вектор движения может использоваться в качестве величины движения объекта. Информация, которая включает в себя векторы движения и указывает величину движения заранее заданной части объекта, может представлять собой поле вектора движения (MVF). Другими словами, MVF указывает величину движения поверхности, формирующей объект.
MVF является информацией, полученной для извлечения движения объекта, и величина движения объекта может быть измерена посредством использования гибкой регистрации. Кроме того, величина движения объекта может быть измерена посредством применения ряда методик измерения движения, таких как жесткая регистрация, методика оптического потока и методика сопоставления характеристик.
В приведенном ниже описании случай использования гибкой регистрации для получения MVF описан в качестве примера.
Подробно, множество контрольных точек, например, контрольные точки 1351 и 1352, устанавливают на сетке изображения первого изображения 1310 или второго изображения 1320, и оптимальный вектор движения, например, вектор движения 1356 и/или 1358 вычисляют в каждой контрольной точке. Вектор движения представляет собой вектор, включающий в себя направление и размер движения. Векторы движения в соответствующих контрольных точках интерполируются для получения MVF, указывающего вектора движения во всех вокселах. Например, B-сплайновый способ деформации свободной формы может применяться в качестве способа интерполяции векторов движения. Кроме того, методика оптимизации может применяться в качестве способа вычисления оптимального вектора движения в каждой контрольной точке. Подробно, в соответствии с методикой оптимизации, MVF обновляется посредством повторяющегося обновления вектора движения в контрольных точках, первое изображение 1310 или второе изображение 1320 деформируется на основании обновленного MVF, и деформированное первое изображение или второе изображение сравнивают со вторым изображением 1320 или первым изображением 1310 до деформирования. Когда степень подобия между изображением до деформирования и изображением после деформирования является самой высокой, повторение заканчивается, и вычисляется вектор движения. Степень подобия может быть указана посредством использования отрицательной величины суммы квадратов разности значений яркости двух изображений, которые подвергаются сравнению.
В другом способе векторы движения могут быть получены путем установки множества контрольных точек на поверхности объекта и сравнения контрольных точек, указывающих одни и те же положения в объектах на первом изображении 1310 и втором изображении 1320. Подробно, относительные различия между контрольными точками получают путем сопоставления контрольных точек объекта на первом изображении 1310 и контрольным точек объекта на втором изображении 1320. Значение относительных различий может использоваться в качестве вектора движения в текущей контрольной точке. MVF указывает вектора движения во всех вокселах, полученные путем интерполяции векторов движения в соответствующих контрольных точках. Как в вышеописанном примере, B-сплайновый способ деформации свободной формы может применяться использоваться в качестве способа интерполяции векторов движения.
Обратимся к фиг. 13C; поскольку угловое сечение 1360 за один цикл, первое угловое сечение 1361 и второе угловое сечение 1362 идентично соответствуют угловому сечению 1210 за один цикл, первому угловому сечению 1211 и второму угловому сечению 1212, которые описаны на фиг. 12, то их подробные описания опущены в настоящем раскрытии.
Кроме того, на фиг. 13C, которая представляет собой график, показывающий первую информацию 1380, ось X обозначает угловое сечение за один цикл или время, соответствующее одному циклу, тогда как ось Y обозначает весовое значение W, соответствующее величине движения.
Подробно, первая информация может представлять собой информацию, соответствующую MVF между первым изображением 1310 и вторым изображением 1320, то есть, информацию, указывающую величину движения объекта, соответствующую моменту времени. Подробно, первая информация может представлять собой информацию, указывающую величину движения поверхности объекта, соответствующую времени. Каждое время может представлять собой определенное время, включенное в период времени одного цикла, соответствующий угловому сечению за один цикл. Поскольку время одного цикла представляет собой время, затраченное генератором 106 рентгеновского излучения, включенным в «гантри» 730, на вращение для одного цикла, то угол вращения «гантри» 730 может использоваться вместо времени в первой информации. Кроме того, «гантри» 730 может содержать по меньшей мере один генератор 106 рентгеновского излучения, как описано выше. Подробно, «гантри» 730 может содержать одиночный источник или двойной источник.
Кроме того, когда величину движения второго изображения, 1320, полученного во втором угловом сечении 1362, измеряют посредством использования первого изображения 1310, полученного в первом угловом сечении 1361, которое является начальным сечением углового сечения 1360 за один цикл, в качестве контрольного изображения, величина движения первого изображения 1310 может составлять 0%-е значение движения, а величина движения второго изображения 1320 может составлять 100%-е значение движения. В приведенном ниже описании значение поля вектора движения, которое представляет собой величину движения между первым изображением 1310 и вторым изображением 1320, выражено весовым значением W. Кроме того, величина движения может представлять собой сумму абсолютных значений всех векторов движения в поле вектора движения. Кроме того, величина движения может быть выражена путем преобразования с использованием W.
Кроме того, когда зависимость между временем и весовым значением, указывающим величину движения объекта, является линейной, как проиллюстрировано на фиг. 13C, весовое значение W и время могут быть показаны в виде графика 1370, проиллюстрированного в сечении 1390. Кроме того, форма графика 1370, соответствующая первой информации, может свободно задаваться пользователем или устанавливаться как оптимизированная с учетом объекта. Например, когда объект является сердцем, график 1370 может иметь нелинейную форму в соответствии с состоянием сердца в момент времени, в котором изображение должно быть реконструировано.
Подробно, когда величина движения объекта и время имеют линейную зависимость, получатель 710 данных может, соответственно, сопоставлять нулевое MVF и MVF, указывающее величину движения между первыми и вторыми изображениями 1310 и 1320 с первым весовым значением и вторым весовым значением. Подробно, нулевое MVF может соответствовать начальной точке углового сечения за один цикл, и MVF, указывающее величину движения между первыми и вторыми изображениями 1310 и 1320 может соответствовать конечной точке углового сечения за один цикл. Обратимся к фиг. 13C; на графике 1370, указывающем первую информацию 1380, весовое значение 0, указывающее нулевое MVF, соответствует начальной точке 0 углового сечения за один цикл 1360 или времени t=0, а весовое значение 1, указывающее MVF, выражающее величину движения между первым изображением 1310 и вторым изображением 1320, соответствует угловой точке 180+a, которая является конечной точкой углового сечения 1360 за один цикл, или времени t=end. Кроме того, случай, в котором время и весовое значение имеют линейную зависимость друг с другом, описан в качестве примера.
Первое время t1 соответствует первому изображению, а второе время t2 соответствует второму изображению. Например, если исходные данные для реконструкции первого изображения получены в сечении от 0 до 0,03 секунд из 0,2 секунд, соответствующих угловому сечению 1360 за один цикл, то первое время может являться моментом времени 0,015 секунд, который является средним моментом времени сечения от 0 до 0,03 секунд. Другими словами, когда заранее заданное изображение реконструируют посредством использования исходных данных, полученных в заранее заданном времени сечения, момент времени, соответствующий заранее заданному изображению, может являться средним моментом времени заранее заданного времени сечения. Кроме того, первое изображение 1310, соответствующее первому времени t1, может соответствовать проекции, когда генератор 106 рентгеновского излучения обращен к объекту при нахождении в положении, соответствующем первому времени t1. Кроме того, второе изображение 1320, соответствующее второму времени t2, может соответствовать проекции, когда генератор 106 рентгеновского излучения обращен к объекту при нахождении в положении, соответствующем второму времени t2.
Кроме того, в первой информации, когда весовое значение находится между от 0 до 1, минимальное весовое значение «0» может соответствовать величине движения в положении или во время, когда размер объекта уменьшается больше всего в угловом сечении 1360 за один цикл, а максимальное весовое значение «1» может соответствовать величине движения в положении или во время, когда размер объекта является самым большим в угловом сечении 1360 за один цикл.
Кроме того, в первой информации зависимость между величиной движения и временем может быть определена согласно зависимости, которая моделируется квадратным уравнением, или зависимости, которая моделируется статистической информацией.
Например, структура движения объекта может быть смоделирована статистически. Подробно, когда объект является сердцем, движение сердца моделируется статистически, и форма графика 1370 в сечении 1390 в первой информации может быть установлена как соответствующая смоделированному движению сердца.
Кроме того, в первой информации форма графика, указывающего структуру движения объекта, может изменяться в соответствии с объектом. Например, когда объект является сердцем целиком, форма графика в первой информации может отражать структуру движения всего сердца. Кроме того, когда объект является коронарной артерией, входящей в сердце, форма графика первой информации может отражать структуру движения коронарной артерии. Кроме того, даже когда объект является коронарной артерией, входящей в сердце, структура движения может изменяться в соответствии с положением коронарной артерии в сердце, и, таким образом, форма графика первой информации может быть установлена как изменяющаяся в соответствии с положением коронарной артерии. Кроме того, когда объект является митральным клапаном (MV), входящим в состав сердце, форма графика первой информации может отражать структуру движения MV.
Кроме того, структура движения может изменяться в соответствии с частичной областью объекта, который будет подвергаться томографическому сканированию. В этом случае первая информация может быть получена для каждой частичной области в целях отражения различной структуры движения для каждой частичной области. Целевое изображение, указывающее весь объект, может быть реконструировано путем выполнения коррекции движения для каждой частичной области посредством использования первой информации, полученной и отличающейся для каждой частичной области. Например, когда объект является сердцем, структура движения может изменяться по левому желудочку, правому желудочку, левому предсердию и правому предсердию. В этом случае первая информация может быть индивидуально получена в левом желудочке, правом желудочке, левом предсердии и правом предсердии, и коррекция движения выполняется на частичном изображении левого желудочка, правого желудочка, левого предсердия и правого предсердия, и скорректированные по движению частичные изображения синтезируются для реконструкции целевого изображения, указывающего сердце.
Кроме того, в первой информации зависимость между величиной движения и временем может быть установлена пользователем. Например, пользователь может установить форму графика 1370 в сечении 1390 через пользовательский интерфейс 750. Установка первой информации через пользовательский интерфейс 750 подробно описана ниже в отношении фиг. 28.
Также, для того, чтобы первая информация 1380 более точно отражала изменение в движении между первым изображением 1310 и вторым изображением 1320, при получении первой информации 1380 изменение в движении объекта в угловом сечении между первым угловым сечением 1361 и вторым угловым сечением 1362 может быть оценено посредством использования исходных данных, полученных во всем угловом сечении 1360 за один цикл.
Например, получатель 710 данных сравнивает оцененные данные проецирования, полученные посредством прямой проекции целевого изображения, реконструированного посредством использования первой информации 1380 в целевое время, с измеренными данными проецирования, полученными посредством томографического сканирования в целевое время. В целях снижения расхождения между оцененными данными проецирования и измеренными данными проецирования получатель 710 данных может корректировать первую информацию 1380. Как описано выше, получатель 710 данных может многократно корректировать первую информацию 1380 таким образом, чтобы первая информация 1380 могла точно отражать движение объекта.
Реконструктор 720 изображения реконструирует целевое изображение, соответствующее целевому времени, на основании первой информации.
Фиг. 14 является представлением для описания движения объекта. Несмотря на то, что генератор 106 рентгеновского излучения проецирует рентгеновское излучение в форме конического пучка, как проиллюстрировано на фиг. 4, описанной выше, пример, в котором конический пучок перегруппировывается для преобразования в параллельный пучок для последующего использования, описан на фиг. 14. Соответственно, случай, в котором пучок, спроецированный в первом угловом сечении 1411 и втором угловом сечении 1412, проиллюстрирован как параллельный пучок, а угловое сечение за один цикл, составляющее угол 180+a, описано в качестве примера.
Обратимся к фиг. 14; когда генератор 106 рентгеновского излучения выполняет томографическое сканирование при вращении вокруг объекта 1405, генератор 106 рентгеновского излучения проходит вдоль круглой траектории 1041 и проецирует рентгеновское излучение в направлении объекта 1405. Подробно, генератор 106 рентгеновского излучения выполняет томографическое сканирование при вращении вокруг объекта 1405 согласно способу половинной реконструкции. Первое угловое сечение 1411 и второе угловое сечение 1412 с фиг. 14 идентично соответствуют первому угловому сечению 1361 и второму угловому сечению 1362 с фиг. 13, соответственно. Кроме того, объект 1405 с фиг. 14 может идентично соответствовать объекту, например, объектам 1311 и 1321, проиллюстрированным на фиг. 13A.
В случае, когда объект, включенный в первое изображение, полученное в первом угловом сечении 1411, соответствующем первому времени t11, и объект, включенный во второе изображение, полученное во втором угловом сечении 1412, соответствующем второму времени t15, сравнивают друг с другом, посредством этого получают величину движения объекта и первую информацию, и изменение в размере объекта в угловом сечении 1410 за один цикл может быть предсказано посредством использования первой информации.
Например, объект 1405 в первое время t11, соответствующее первому угловому сечению 1411, имеет первый размер 1420. В результате постепенного увеличения размера объекта 1405 в соответствии с промежутком времени, объект 1405 может иметь второй размер 1430 во второе время t15, соответствующее второму угловому сечению 1412.
Когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1405 при вращении в течение первого углового сечения 1411, рентгеновское излучение проецируется в направлении проецирования рентгеновского излучения 1470 и, таким образом, поверхность, например, поверхности 1451, 1452, 1453, и 1454 объекта 1405, существующие в направлениях, параллельных направлению проецирования рентгеновского излучения 1470, отчетливо отбираются и изображаются.
Соответственно, на первом изображении проиллюстрированы поверхности 1451 и 1452 объекта 1405, имеющие первый размер 1420, и на втором изображении проиллюстрированы поверхности 1453 и 1454 объекта 1405, имеющий второй размер 1430.
Получатель 710 данных получает первую информацию путем сравнения первого изображения и второго изображения. Обратимся к части 1490 фиг. 14; первая информация, указывающая движение объекта 1405, может быть получена путем сравнения поверхностей 1451 и 1452 объекта 1405, имеющих первый размер 1420, и поверхностей 1453 и 1454 объекта 1405, имеющих второй размер.
Подробно, первая информация указывает движение объекта в соответствии со временем и включает в себя информацию, указывающую движения во всех направлениях на грани или на поверхности компонента, параллельных направлению проецирования рентгеновского излучения, спроецированного в направлении объекта 1405 в первом угловом сечении 1411 или втором угловом сечении 1412. Подробно, поверхности 1451, 1452, 1453 и 1454, которые отчетливо изображены на первом изображении и втором изображении, является поверхностями, расположенными в направлениях, параллельных направлению проецирования рентгеновского излучения 1470 рентгеновского излучения, спроецированного в первое время и во второе время, или в первом угловом сечении 1411 и втором угловом сечении 1412. Соответственно, первая информация может включать в себя информацию о движениях во всех направлениях поверхностей 1451, 1452, 1453 и 1454, отчетливо изображенных на первом и втором изображениях.
Кроме того, первая информация может указывать движение объекта 1405 в первом направлении 1480, перпендикулярном направлениям 1470 проецирования рентгеновского излучения, так чтобы движение объекта 1405 можно было бы проще сравнить с движением объекта 1405 в направлении, отличном от первого направления 1480. Подробно, поверхность 1453 на втором изображении является частью объекта 1405, соответствующей поверхности 1451 на первом изображении. Можно заметить, что поверхность 1451 перемещается на первое значение 1481 в первом направлении 1480, так чтобы иметь изменение положения, аналогичное 1453. Кроме того, поверхность 1454 на втором изображении является частью объекта 1405, соответствующей поверхности 1452 на первом изображении. Можно заметить, что поверхность 1452 перемещается на второе значение 1482 в первом направлении 1480, так чтобы иметь изменение положения, аналогичное поверхности 1454.
Кроме того, хотя на фиг. 14 направление 1470 проецирования рентгеновского излучения в первом угловом сечении 1411 и втором угловом сечении 1412 проиллюстрировано в одном направлении, поскольку генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1405 во множестве положений при вращении в первом угловом сечении 1411, то направление 1470 проецирования рентгеновского излучения в первом сечении может являться по меньшей мере одним из направлений 1470 проецирования рентгеновского излучения от 0 до a. Соответственно, первое направление 1480, перпендикулярное к направлению 1470 проецирования рентгеновского излучения в первом угловом сечении 1411 и втором угловом сечении 1412, может находиться в заранее заданном диапазоне, соответствующем направлению проецирования рентгеновского излучения 1470 в первом угловом сечении 1411 и втором угловом сечении 1412.
На фиг. 14 направление, в котором рентгеновское излучение проецируется в направлении объекта 1405, когда генератор 106 рентгеновского излучения располагается в центре первого углового сечения 1411 или второго углового сечения 1412, проиллюстрировано, в качестве примера, как направление 1470 проецирования рентгеновского излучения в первом угловом сечении 1411 или втором угловом сечении 1412. Первое направление 1480 проиллюстрировано с примером, в котором первое направление 1480 перпендикулярно направлению 1470.
Например, когда весовое значение и время, соответствующие величине движения объекта в первой информации, находятся в линейной зависимости, как проиллюстрировано на фиг. 13C, размер объекта 1405 может увеличиваться линейно.
Соответственно, как проиллюстрировано на фиг. 14, можно ожидать, что размер объекта 1405 в третьем положении t12 изменяется на первую величину 1442 изменения, и станет больше, чем первый размер 1420. Соответственно, можно ожидать, что размер объекта 1405 в третье время t12 может иметь третий размер 1421.
Кроме того, можно ожидать, что размер объекта 1405 в четвертое время t13 изменяется на вторую величину 1444 изменения, и станет больше, чем первый размер 1420. Соответственно, можно ожидать, что размер объекта 1405 в четвертое время t13 может иметь размер четвертого размера 1422. Можно ожидать, что размер объекта 1405 в пятое время t14 изменяется третьей суммой изменения 1446, чтобы быть больше, чем первый размер 1420. Соответственно, можно ожидать, что размер объекта 1405 в пятое время t14 может иметь размер пятого размера 1423.
Кроме того, размер объекта 1405 в третье время t12, в четвертое время t13 и в пятое время t14 может быть оценен путем сжатия объекта 1405, имеющего второй размер 1430, на основании первой информации.
Подробно, размер, форма и/или положение объекта 1405 в целевое время могут быть оценены посредством использования первой информации. В примере движения объекта, проиллюстрированном на фиг. 14, реконструктор 720 изображения может оценить величину изменения в размере объекта 1405 в целевое время посредством использования первой информации, и может генерировать целевое изображение посредством деформирования объекта 1405 на основании предполагаемой величины изменения размера. Подробно, деформирование объекта показывает коррекцию движения объекта. То есть, состояние, например, по меньшей мере одно из размера, формы и положения объекта в целевое время оценивают посредством использования первой информации и, таким образом, целевое изображение реконструируют посредством коррекции движения объекта в соответствии с предполагаемым состоянием.
Фиг. 15 является представлением для описания операции реконструкции целевого изображения.
Когда первая информация получена, реконструктор 720 изображения реконструирует целевое изображение, указывающее объект в целевое время на основании первой информации. Подробно, реконструктор 720 изображения может оценивать величину движения объекта в целевое время на основании первой информации и может реконструировать целевое изображение на основании оцененной величины движения.
Подробно, реконструктор 720 изображения может реконструировать целевое изображение посредством использования первой информации и по меньшей мере одного из множества частичных угловых изображений, включающего первое изображение и второе изображение.
Подробно, реконструктор 720 изображения может реконструировать целевое изображение путем деформирования частичных изображений, указывающих части объекта, на основании первой информации.
Частичное угловое изображение, используемое для реконструкции целевого изображения, может являться изображением, реконструированным посредством использования фрагментов данных проецирования, полученных в частичном угловом сечении, таких как первые и вторые изображения. Кроме того, частичное угловое изображение может являться изображением, сгенерированным путем выполнения обратного проецирования с фильтрацией на множестве фрагментов данных проецирования, соответствующих множеству последовательных смежных проекций, или изображением, сгенерированным путем выполнения обратного проецирования с фильтрацией на фрагментах данных проецирования, соответствующих единственной проекции.
Например, реконструктор 720 изображения может реконструировать целевое изображение в целевое время Ttarget путем деформирования объекта 1505 на основании первой информации. Подробно, поскольку размер объекта 1505 в целевое время Ttarget может быть точно оценен посредством использования первой информации, реконструктор 720 изображения деформирует реконструированное томографическое изображение для подстройки к оцененному размеру объекта с использованием данных проецирования, полученных в течение углового сечения 1510 за один цикл, посредством чего реконструируя целевое изображение.
Кроме того, реконструктор 720 изображения может реконструировать целевое изображение путем деформирования первого изображения, полученного в первом угловом сечении 1530, второго изображения, полученного во втором угловом сечении 1540, и по меньшей мере одного частичного изображения согласно размеру объекта 1505 в целевое время Ttarget (t=Ttarget). Поверхности объекта 1505, которые не показаны на по меньшей мере одном из первого изображения и второго изображения, могут быть получены путем деформирования по меньшей мере одного из частичных угловых изображений, реконструированных в соответствии с фрагментами данных проецирования, полученными в по меньшей мере одном из угловых сечений, за исключением первого углового сечения 1530 и второго углового сечения 1540 углового сечения 1510 за один цикл.
В приведенном ниже описании операции реконструкции целевого изображения посредством использования первой информации 1380, описанные на фиг. 13C, описаны подробно.
Кроме того, на фиг. 15 брюшная полость пациента в качестве примера проиллюстрирована как объект, и проиллюстрирован случай реконструкции множества осевых плоскостей.
Подробно, реконструктор 720 изображений может реконструировать целевое изображение посредством использования множества фрагментов данных проецирования, соответствующих множеству проекций, которые являются исходными данными, полученными при выполнении генератором 106 рентгеновского излучения томографического сканирования в процессе вращении. Подробно, реконструктор 720 изображений может получать целевое изображение путем выполнения коррекции движения на основании первой информации об изображении, полученной путем выполнения обратного проецирования с фильтрацией на данных проецирования, соответствующих проекциям.
Подробно, для реконструкции целевого изображения в целевое время Ttarget, соответствующее заранее заданной угловой точке 1520 в угловом сечении 1510 за один цикл, используется весовое значение, которое соответствует целевому времени Ttarget и получено из первой информации 1380.
Например, обратимся к фиг. 13C; целевое весовое значение W1, соответствующее целевому времени Ttarget, получено из первой информации. Множество подвергнутых обратному проецированию с фильтрацией изображений, полученных путем выполнения обратного проецирования с фильтрацией на каждом из фрагментов данных проецирования, соответствующих каждой из проекций, полученных в угловом сечении 1510 за один цикл, имеет величину движения, соответствующую весовому значению в каждой проекции (или точке наблюдения). Соответственно, для обеспечения того, чтобы каждое подвергнутое обратному проецированию с фильтрацией изображение имело состояние движения объекта в целевое время, величина движения, соответствующая разности между целевым весовым значением W1 и весовым значением относительно проекции (или точки наблюдения), соответствующим каждому подвергнутому обратному проецированию с фильтрацией изображению, применяется к каждому подвергнутому обратному проецированию с фильтрацией изображению в целях деформирования. Целевое изображение может быть реконструировано посредством использования множества деформированных подвергнутых обратному проецированию с фильтрацией изображений. Подробно, в процессе выполнения обратного проецирования с фильтрацией на данных проецирования, полученных в угловом сечении 1510 за один цикл, пиксель, отфильтрованный обратной проекцией, деформируется посредством использования первой информации, и таким образом реконструируют целевое изображение.
Также реконструктор 720 изображения может получать изображение путем выполнения обратного проецирования с фильтрацией на фрагментах данных проецирования, полученных в угловом сечении 1510 за один цикл, и затем деформировать полученное изображение посредством использования первой информации, таким образом, выполняя реконструкция целевого изображения.
Подробно, реконструктор 720 изображения реконструирует начальное изображение путем выполнения обратного проецирования с фильтрацией на множестве фрагментов данных проецирования, которые являются исходными данными, полученными посредством томографического сканирования с вращением менее чем на один оборот. Движение объекта 1505 в целевое время Ttarget оценивается на основании первой информации и может деформировать начальное изображение на основании оцененного движения, посредством чего реконструируется целевое изображение.
Кроме того, реконструктор 720 изображения может деформировать сетку изображения, сформированную из множества пикселей, в целях визуализации объекта 1505 на основании первой информации, и может реконструировать целевое изображение посредством использования деформированной сетки изображения. Реконструктор 720 изображения может выполнять обратное проецирование с фильтрацией на данных проецирования, полученных с помощью томографического сканирования с вращением менее чем на один оборот, посредством использования деформированной сетки изображения, и может реконструировать целевое изображение. Реконструкция целевого изображения с помощью деформирования сетки изображения ниже описано подробно в отношении фиг. 23А и 23B.
Кроме того, реконструктор 720 изображения может деформировать центр воксела, указывающего объект 1505, на основании первой информации и может реконструировать целевое изображение посредством использования деформированного воксела. Реконструкция целевого изображения с применением деформирования вокселов ниже описано подробно в отношении фиг. 24А и 24B.
Кроме того, целевое время Ttarget может быть установлено равным времени между первым временем t1 и вторым временем t2. Подробно, целевое время, Ttarget может быть установлено равным среднему времени между первым временем t1 и вторым временем t2, что подробно описано ниже в отношении фиг. 16-18.
Кроме того, реконструкция целевого изображения с применением деформирования ниже описано подробно в отношении фиг. 20-24.
Фиг. 16А и 16B являются представлениями для описания установки целевого времени.
Обратимся к фиг. 16; в способе PAR ясно изображенная часть реконструированного изображения представляется различающейся в соответствии с углом обзора, под которым проецируется рентгеновское излучение. Подробно, что касается площадей поверхности объекта, изображенного на реконструированном изображении, существуют площадь поверхности, выбираемая относительно чаще и площадь поверхности, выбираемая относительно реже, в соответствии с углом обзора.
Подробно, обратимся к фиг. 16A; когда рентгеновское излучение проецируется в направлении объекта приблизительно в 5-часовом направлении 1620, реконструированное изображение 1610 проиллюстрировано посредством использования исходных данных, сгенерированных обнаруженным рентгеновским излучением. Поверхности 1631 и 1632, простирающиеся в направлении, параллельном 5-часовому направлению 1620, как проиллюстрировано на фиг. 16A, ясно видны на реконструированном изображении 1610, тогда как поверхность, простирающаяся в перпендикулярном направлении к 5-часовому направлению 1620, не видна ясно.
Обратимся к фиг. 16B; когда рентгеновское излучение проецируется в направлении объекта приблизительно в 7-часовом направлении 1660, реконструированное изображение 1650 проиллюстрировано посредством использования исходных данных, сгенерированных обнаруженным рентгеновским излучением. Поверхности 1671 и 1672, поверхностей простирающиеся в направлении, параллельном 7-часовому направлению 1660, как проиллюстрировано на фиг. 16B, ясно видны на реконструированном изображении 1650, тогда как поверхность, простирающаяся в перпендикулярном направлении к 7-часовому направлению 1660, не видна ясно.
Другими словами, часть поверхности, которая изображена ясно, отличается в соответствии с направлением рентгеновского пучка. Подробно, часть поверхности, простирающаяся в направлении, аналогичном направлению рентгеновского пучка, может быть изображена ясно, в отличие от части поверхности другой области.
Соответственно, как описано выше, когда целевое время Ttarget установлено как среднее время между первым временем t1 и вторым временем t2, целевое изображение, соответствующее целевому времени, Ttarget, может быть реконструировано более точно. Подробно, когда целевое время Ttarget установлено как среднее время между первым временем t1 и вторым временем t2, часть поверхности объекта, которая не изображена ясно по данным проецирования, полученным в целевое время Ttarget, изображена путем деформирования части поверхности изображения, которая ясно изображена по данным проецирования, полученным в по меньшей мере одном из первого времени t1 и второго времени t2, и, таким образом, объект в целевое время Ttarget может быть изображен более ясно.
Фиг. 17 является представлением для описания установки целевого времени.
Обратимся к фиг. 17; в целом фиг. 17 идентично соответствует фиг. 14. Подробно, объект 1705, первое угловое сечение 1711 и второе угловое сечение 1712 с фиг. 17 идентично соответствуют объекту 1405, первому угловому сечению 1411 и второму угловому сечению 1412 с фиг. 14. Поверхности 1721 и 1722 объекта 1720 ясно изображены на первом изображении, полученном в первом угловом сечении 1711, как проиллюстрировано на фиг. 17. Кроме того, поверхности 1761 и 1762 объекта 1760 ясно изображены на втором изображении, полученном во втором угловом сечении 1712, как проиллюстрировано на фиг. 17.
По сравнению с указанным выше, поверхности 1741 и 1742 объекта 1740 на изображении, полученном в угловом сечении, соответствующем целевому времени Ttarget, являются ясно изображенными, как проиллюстрировано на фиг. 17.
Другими словами, поверхности 1741 и 1742 объекта 1740, которые ясно изображены и соответствуют целевому времени Ttarget, и поверхности 1721 и 1722 или 1761 и 1762 объекта 1740 или объекта 1760, которые ясно изображены и соответствуют первым и вторым изображениям, представляют собой части, не перекрывающиеся друг с другом. Соответственно, целевое время Ttarget устанавливают как среднее время между первым временем t1 и вторым временем t2, и затем целевое изображение, указывающее состояние объекта в установленное целевое время, может быть реконструировано.
Подробно, при визуализации объекта 1705 части поверхности, например, поверхности 1722 и 1721 или 1761 и 1762, простирающиеся в направлении, аналогичном направлению 1791, могут быть изображены путем деформирования по меньшей мере одного из первого и второго изображений, и части поверхности, например, поверхности 1741 и 1742, простирающиеся в направлении, параллельном направлению 1741, могут быть изображены путем деформирования изображения, полученного в угловом сечении, соответствующем целевому времени Ttarget. Соответственно, даже поверхности, ясно не отображенные в целевое время Ttarget, могут быть ясно изображены на реконструированном целевом изображении.
Хотя на фиг. 17 случай реконструкции целевого изображения путем деформирования подвергнутого обратной проекции с фильтрацией частичного углового изображения описан в качестве примера, реконструктор 720 изображения может реконструировать целевое изображение путем настройки самих данных проецирования. Подробно, каждый фрагмент данных проецирования, полученных в угловом сечении за один цикл, может быть скорректирован в соответствии с состоянием объекта в целевое время Ttarget. Подробно, фрагменты данных проецирования, включенные в угловое сечение за один цикл, изображают различные части объекта согласно проекции. Соответственно, реконструктор 720 изображения может реконструировать целевое изображение путем оценки состояния объекта в целевое время Ttarget посредством использования первой информации, настройки каждого множества фрагментов данных проецирования, соответствующих множеству проекций согласно оцененному состоянию объекта, и выполнения обратного проецирования с фильтрацией на настроенных данных проецирования.
Фиг. 18А и 18B являются представлениями для описания реконструкции целевого изображения, указывающего объект, который не двигается. Подробно, фиг. 18A иллюстрирует, что генератор 106 рентгеновского излучения выполняет томографическое сканирование при вращении вокруг объекта 1801. Кроме того, фиг. 18B иллюстрирует операцию выполнения обратного проецирования на данных проецирования, полученных путем фильтрации исходных данных, полученных через выполнение томографического сканирования.
На фиг. 18A случай, в котором генератор 106 рентгеновского излучения вращается вокруг объекта 1801 и выполняет томографическое сканирование, а томографическое изображение реконструируют посредством способа обратного проецирования с фильтрацией, описан в качестве примера. Кроме того, случай, в котором объект 1801 содержит круглую цель 1802, как проиллюстрировано на фиг. 18A, описан в качестве примера. Кроме того, как описано на фиг. 13, угловое сечение 1360 за один цикл представляет собой угол 180+угол веерного пучка, который является сечением данных проецирования. На фиг. 18A, однако, случай, в котором томографическое сканирование выполняется при вращении на 180, описан в качестве примера для удобства объяснения.
Обратимся к фиг. 18A; при прохождении генератора 106 рентгеновского излучения вдоль исходной траектории 1810, которая является круговой, и проецировании им рентгеновского излучения в направлении объекта 1805 в каждом из множества положений, имеющих заранее заданный угловой интервал, получают данные проецирования. Данные проецирования фильтруют, в результате чего получают отфильтрованные данные проецирования. На фиг. 18A множество точек, расположенных на исходной траектории 1810, указывают положения, в которых генератор 106 рентгеновского излучения располагается и проецирует рентгеновское излучение. Например, при перемещении с заранее заданным интервалом, таким как 0,5, 1, или 3, генератор 106 рентгеновского излучения может спроецировать рентгеновское излучение в направлении объекта 1805. Вращение начинается в первое время T1 и останавливается во второе время T2. Соответственно, первое время T1 соответствует углу вращения 0, а второе время T2 соответствует углу вращения 180.
Подробно, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1801 в первое время T1, рентгеновское излучение, спроецированное в направлении 1832 проецирования рентгеновского излучения, проходит через объект 1813, в результате чего может быть получен сигнал 1831. Значение сигнала 1831 может изменяться на поверхности объекта 1813 вследствие различия в проницаемости рентгеновского излучения в соответствии с материалом объекта 1813. Подробно, значение сигнала 1831 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1832 проецирования рентгеновского излучения.
Кроме того, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1801 в третье время T12, рентгеновское излучение, спроецированное в направлении 1834 проецирования рентгеновского излучения, проходит через объект 1814, в результате чего может быть получен сигнал 1833. Значение сигнала 1833 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1834 проецирования рентгеновского излучения.
Кроме того, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1801 в четвертое время T13, рентгеновское излучение, спроецированное в направлении 1836 проецирования рентгеновского излучения, проходит через объект 1815, в результате чего может быть получен сигнал 1835. Значение сигнала 1835 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1836 проецирования рентгеновского излучения.
Кроме того, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1801 в пятое время T14, рентгеновское излучение, спроецированное в направлении 1838 проецирования рентгеновского излучения, проходит через объект 1816, в результате чего может быть получен сигнал 1837. Значение сигнала 1837 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1838 проецирования рентгеновского излучения.
Кроме того, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1801 во второе время T2, рентгеновское излучение, спроецированное в направлении 1824 проецирования рентгеновского излучения, проходит через объект 1817, в результате чего может быть получен сигнал 1839. Значение сигнала 1839 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1824 проецирования рентгеновского излучения.
Кроме того, поскольку сигнал 1831 содержит информацию о поверхности, размещенной в направлении 1832 проецирования рентгеновского излучения, изображение 1851, полученное путем выполнения обратного проецирования с фильтрацией на сигнале 1831, вносит вклад в визуализацию поверхности, размещенной в направлении 1832 проецирования рентгеновского излучения. Кроме того, поскольку сигнал 1833 содержит информацию о поверхности, размещенной в направлении 1834 проецирования рентгеновского излучения, отфильтрованные данные проецирования, соответствующие сигналу 1833, вносят вклад в визуализацию поверхности, размещенной в направлении 1834 проецирования рентгеновского излучения. Другими словами, данные проецирования, полученные в каждой проекции, вносят вклад в визуализацию поверхности объекта, соответствующую каждой проекции. Это можно объяснить посредством применения теоремы о центральном сечении, показывающей зависимость между компонентом частоты изображения и значением данных проецирования, полученных посредством проецирования параллельного пучка к объекту 1801. «Проекция» соответствует направлению, положению и/или углу вращения, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта.
Кроме того, DAS 116 с фиг. 4 может получать сигнал, например, сигнал 1831. Блок обработки изображений может обрабатывать сигнал 1831 и генерировать отфильтрованные данные проецирования. Отфильтрованные данные проецирования подвергаются обратной проекции, в результате чего получают изображение 1851.
Подробно, когда генератор 106 рентгеновского излучения вращается и проецирует рентгеновское излучение во множестве положений или проекций, в результате чего получают множество фрагментов отфильтрованных данных проецирования, фрагменты отфильтрованных данных проецирования накапливаются и подвергаются обратному проецированию, в результате чего реконструируют томографическое изображение. Другими словами, изображение, представляющее объект, может быть получено посредством процесса обратного проецирования, в котором отфильтрованные данные проецирования отображены на пиксели изображения.
Обратимся к фиг. 18B; поверхность круговой цели 1802, включенной в объект 1801, в первое время T1 появляется на подвергнутом обратному проецированию изображении 1851, соответствующем первому времени T1. Фрагменты отфильтрованных данных проецирования накапливаются и подвергаются обратному проецированию относительно соответствующих проекций, полученных при вращении генератора 106 рентгеновского излучения против часовой стрелки.
Например, подвергнутое обратному проецированию изображение 1853 получают путем накопления и обратного проецирования фрагментов отфильтрованных данных проецирования, полученных в угловом сечении, имеющем угол 22,5. Частичная поверхность 1854 круглой цели 1802 в объекте 1801 появляется на подвергнутом обратному проецированию изображении 1853.
Затем, подвергнутое обратному проецированию изображение 1855 получают путем накопления и обратного проецирования фрагментов отфильтрованных данных проецирования, полученных в угловом сечении, имеющем угол 45. Частичная поверхность 1856 круглой цели 1802 в объекте 1801 появляется на подвергнутом обратному проецированию изображении 1855.
Затем подвергнутое обратному проецированию изображение 1857 получают путем накопления и обратного проецирования фрагментов отфильтрованных данных проецирования, полученных в угловом сечении, имеющем угол 98. Частичная поверхность 1858 круглой цели 1802 в объекте 1801 появляется на подвергнутом обратному проецированию изображении 1857.
Затем подвергнутое обратному проецированию изображение 1859 получают путем накопления и обратного проецирования фрагментов отфильтрованных данных проецирования, полученных в угловом сечении, имеющем угол 180. Вся поверхность 1864 круглой цели 1802 в объекте 1801 появляется на подвергнутом обратному проецированию изображении 1859.
Для объекта, который не двигается, состояние, например, по меньшей мере одно из размера, положения и формы объекта 1801, не изменяется при рассмотрении каждого из первого времени T1, третьего времени T12, четвертого времени T13, пятого времени T14 и второго времени T2, которые представляют собой множество времен, включенных в угловое сечение за один цикл.
Соответственно, при реконструкции томографического изображения путем накопления фрагментов из подвергнутых обратному проецированию с фильтрацией данных этих фрагментов данных проецирования, соответствующих проекциям, включенным в угловое сечение за один цикл, поскольку состояние объекта 1801 не изменяется в каждой из проекций, то не создается какой-либо нечеткости из-за артефактов движения на подвергнутом обратному проецированию изображении 1859, которое является результатом реконструкции.
Фиг. 18C и 18D являются представлениями для описания артефактов движения, которые могут быть сгенерированы во время реконструкции целевого изображения, указывающего движущийся объект. Подробно, 18C иллюстрирует, что генератор 106 рентгеновского излучения выполняет томографическое сканирование при вращении вокруг объекта 1805. Кроме того, 18D иллюстрирует операцию выполнения обратного проецирования на данных проецирования, полученных путем фильтрации исходных данных, полученных посредством томографического сканирования. На 18D случай реконструкции томографического изображения посредством способа обратного проецирования с фильтрацией описан в качестве примера. Кроме того, случай, в котором объект 1805 включает в себя две круговых цели 1806 и 1807, проиллюстрированный на 18C, описан в качестве примера. В приведенном ниже описании, для удобства объяснения, верхняя круглая цель объекта 1805 называется первой целью 1806, а нижняя круглая цель объекта 1805 называется второй целью 1807. Кроме того, как проиллюстрировано на фиг. 13, угловое сечение 1360 за один цикл представляет собой угол 180+угол веерного пучка. Однако на 18C, для удобства объяснения, случай вращения на 180 и выполнения томографического сканирования описан в качестве примера.
Обратимся к 18C; при прохождении генератора 106 рентгеновского излучения вдоль исходной траектории 1810, которая является круговой, и проецировании им рентгеновского излучения в направлении объекта в каждом из множества положений, имеющих заранее заданный угловой интервал, получают данные проецирования. Затем данные проецирования фильтруют, в результате чего получают отфильтрованные данные проецирования. На 18С множество точек, расположенных на исходной траектории 1810 указывают положения, в которых генератор 106 рентгеновского излучения располагается и проецирует рентгеновское излучение. Например, при перемещении с заранее заданным интервалом, таким как 0,5, 1, или 3, генератор 106 рентгеновского излучения может спроецировать рентгеновское излучение в направлении объекта 1805. Генератор 106 рентгеновского излучения вращается, начиная с первого времени T1 и до второго времени T2. Соответственно, первое время T1 соответствует углу вращения 0, а второе время T2 соответствует углу вращения 180°.
Объект 1805 может перемещаться как объект 1820, объект 1821, объект 1822, объект 1823, и объект 1830, соответственно, в первое время T1, в третье время T12, в четвертое время T13, в пятое время T14 и во второе время T2. Подробно, размер первой цели 1806, включенной в объект 1805, расширяется без изменения ее положения, тогда как вторая цель 1807 не расширяется, но может двигаться слева направо.
Подробно, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1805 в первое время T1, рентгеновское излучение, спроецированное в направлении 1845 проецирования рентгеновского излучения, проходит через объект 1820, в результате чего может быть получен сигнал 1840. Значение сигнала 1840 может изменяться на поверхности объекта 1813 вследствие различия в проницаемости рентгеновского излучения в соответствии с материалом объекта 1820. Подробно, значение сигнала 1840 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1845 проецирования рентгеновского излучения.
Кроме того, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1805 в третье время T12, рентгеновское излучение, спроецированное в направлении 1846 проецирования рентгеновского излучения, проходит через объект 1821, в результате чего может быть получен сигнал 1841. Значение сигнала 1841 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1846 проецирования рентгеновского излучения.
Кроме того, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1805 в четвертое время T13, рентгеновское излучение, спроецированное в направлении проецирования рентгеновского излучения, 1847 проходит через объект 1822, в результате чего может быть получен сигнал 1842. Значение сигнала 1842 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1847 проецирования рентгеновского излучения.
Кроме того, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1805 в пятое время T14, рентгеновское излучение, спроецированное в направлении проецирования рентгеновского излучения, 1849 проходит через объект 1823, в результате чего может быть получен сигнал 1843. Значение сигнала 1843 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1849 проецирования рентгеновского излучения.
Кроме того, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта 1805 во второе время T2, рентгеновское излучение, спроецированное в направлении проецирования рентгеновского излучения, 1850 проходит через объект 1830, в результате чего может быть получен сигнал 1844. Значение сигнала 1844 может изменяться на поверхности, размещенной в направлении, параллельном направлению 1850 проецирования рентгеновского излучения.
Кроме того, поскольку сигнал 1840 содержит информацию о поверхности, размещенной в направлении 1845 проецирования рентгеновского излучения, изображение 1861, полученное путем выполнения обратного проецирования с фильтрацией на сигнале 1840, вносит вклад в визуализацию поверхности, размещенной в направлении 1845 проецирования рентгеновского излучения. Кроме того, поскольку сигнал 1841 содержит информацию о поверхности, размещенной в направлении 1846 проецирования рентгеновского излучения, отфильтрованные данные проецирования, соответствующие сигналу 1841, вносят вклад в визуализацию поверхности, размещенной в направлении 1846 проецирования рентгеновского излучения. Другими словами, данные проецирования, полученные в каждой проекции, вносят вклад в визуализацию поверхности объекта, соответствующую каждой проекции. «Проекция» соответствует направлению, положению и/или углу вращения, когда генератор 106 рентгеновского излучения проецирует рентгеновское излучение в направлении объекта.
Кроме того, DAS 116 с фиг. 4 может получать сигнал, например, сигнал 1840. Блок обработки изображений может обрабатывать сигнал 1840 и генерировать отфильтрованные данные проецирования. Отфильтрованные данные проецирования подвергаются обратной проекции, в результате чего получают изображение 1861.
Подробно, когда генератор 106 рентгеновского излучения вращается и проецирует рентгеновское излучение во множестве положений или проекций, в результате чего получают множество фрагментов отфильтрованных данных проецирования, фрагменты отфильтрованных данных проецирования накапливаются и подвергаются обратному проецированию, в результате чего реконструируют томографическое изображение. Другими словами, изображение, представляющее объект, может быть получено посредством процесса обратного проецирования, в котором отфильтрованные данные проецирования отображены на пиксели изображения.
Обратимся к 18D; поверхность 1862 первой цели 1811 и поверхность 1863 второй цели 1812, включенных в объект 1820, в первое время T1 появляется на подвергнутом обратному проецированию изображении 1861, соответствующим первому времени T1. Фрагменты отфильтрованных данных проецирования накапливаются и подвергаются обратному проецированию относительно соответствующих проекций, полученных при вращении генератора 106 рентгеновского излучения против часовой стрелки.
Например, подвергнутое обратному проецированию изображение 1865 получают путем накопления и обратного проецирования фрагментов отфильтрованных данных проецирования, полученных в угловом сечении, имеющем угол 22,5. Частичная поверхность 1866 первой цели 1806 и частичная поверхность 1876 второй цели 1807 в объекте 1805 появляется на подвергнутом обратному проецированию изображении 1865.
Затем, подвергнутое обратному проецированию изображение 1870 получают путем накопления и обратного проецирования фрагментов отфильтрованных данных проецирования, полученных в угловом сечении, имеющем угол 45. Частичная поверхность 1871 первой цели 1806 и частичная поверхность 1872 второй цели 1807 в объекте 1805 появляется на подвергнутом обратному проецированию изображении 1870.
Затем, подвергнутое обратному проецированию изображение 1875 получают путем накопления и обратного проецирования фрагментов отфильтрованных данных проецирования, полученных в угловом сечении, имеющем угол 150. Частичная поверхность 1876 первой цели 1806 и частичная поверхность 1877 второй цели 1807 в объекте 1805 появляется на подвергнутом обратному проецированию изображении 1875.
Затем, подвергнутое обратному проецированию изображение 1880 получают путем накопления и обратного проецирования фрагментов отфильтрованных данных проецирования, полученных в угловом сечении, имеющем угол 180. Все поверхности первой цели 1806 и второй цели 1807 в объекте 1805 появляются на подвергнутом обратному проецированию изображении 1875.
На 18D, изображение 1890 является томографическим изображением, показывающим результат реконструкции объекта посредством процесса обратного проецирования.
Однако из-за движения объекта фрагменты информации поверхности фрагментов отфильтрованных данных проецирования, полученных в каждой проекции, не соответствуют друг другу. Соответственно, когда накоплено множество фрагментов отфильтрованных данных проецирования, полученных в угловом сечении за один цикл, как проиллюстрировано на 18D, поверхность не появляется ясно и, таким образом, генерируются нечеткости, 1881 и 1882.
Согласно настоящему изобретению, даже когда объект содержит различные материалы, поверхности и/или формы, как объект 1805 с 18C, движение объекта 1805 может быть прослежено, и движение объекта 1805 может быть точно оценено без наложения ограничений на объект, подвергаемый томографическому сканированию. Соответственно, изображение, которое является скорректированным по движению, в соответствии с этим может быть реконструировано. Описанная выше операция реконструкции изображения с использованием первой информации ниже описана подробно в отношении фиг. 19А-24.
Фиг. 18E является представлением для описания объекта, представленного как 3D-томографическое изображение. Несмотря на то, что 2D-томографическое изображение описано в качестве примера в приведенных выше чертежах, целевое изображение может быть реконструировано как 3D-томографическое изображение.
Подробно, обратимся к фиг. 13C; объект может быть реконструирован как 3D-томографическое изображение 1895. Когда целевое изображение реконструируют как 3D-томографическое изображение 1895, первое изображение и второе изображение получают как 3D-томографические изображения, показывающие объект. Первое изображение может содержать информацию о движении объекта в 3D.
Например, как проиллюстрировано на 18C, когда объект представлен на 3D-томографическом изображении 1895 как первая цель 1896 и вторая цель 1897, первая информация может содержать информацию о движениях первой цели 1896 и второй цели 1897. Фиг. 19А и 19B являются представлениями для описания измерения величины движения объекта. На фиг. 19А и 19B первое угловое сечение 1901 и второе угловое сечение 1902 идентично соответствуют первому угловому сечению 1361 и второму угловому сечению 1362 с фиг. 13, соответственно. Первое изображение 1910 и второе изображение 1920 соответствуют первому изображению 1310 и второму изображению 1320 с фиг. 13, соответственно. Информация 1940 MVF идентична информации MVF, описанной на фиг. 13B. Соответственно, на фиг. 19А и 19B избыточные описания с фиг. 18А и 18B опущены. Кроме того, поскольку объект 1805 на фиг. 19А идентичен объекту 1805 на 18C, опущено избыточное описание с 18C.
Обратимся к фиг. 19B; первое изображение 1910 получают с использованием данных проецирования, соответствующих первому угловому сечению 1901, которые получены в течение вращения генератора 106 рентгеновского излучения вокруг объекта 1805. Первое изображение 1910 показывает поверхности 1911 и 1912, включенные в первую цель 1806, и поверхности 1913 и 1914, включенные во вторую цель 1807. Кроме того, второе изображение, 1920 получают с использованием данных проецирования, соответствующих второму угловому сечению 1902, которые получены в течение вращения генератора 106 рентгеновского излучения вокруг объекта 1805. Второе изображение 1920 показывает поверхности 1921 и 1922, включенные в первую цель 1806, и поверхности 1923 и 1924, включенные во вторую цель 1807. Другими словами, данные проецирования, полученные в каждой проекции заранее заданного углового сечения, включенного в угловое сечение за один цикл, вносят вклад в визуализацию различных других поверхностей или различных других областей объекта 1805.
Поскольку поверхности одних и тех же частей объекта 1805 показаны на первом изображении 1910 и втором изображении 1920, получатель 710 данных сравнивает первое изображение 1910 и второе изображение 1920, как на изображении 1930, и получает MVF 1940, указывающее движение объекта 1805. MVF 1940 включает в себя векторы 1941, указывающие направление движения и степень (величину) движения поверхности одной и той же части. Соответственно, первая информация, указывающая движение объекта 1805 между первым временем t1 и вторым временем t2, может быть получена через MVF 1940.
Поскольку первое изображение 1910 и второе изображение 1920 являются изображениями, реконструированными с использованием данных проецирования, полученных в частичном угловом сечении, то, соответственно, реконструированное изображение может иметь высокое временное разрешение и уменьшенные артефакты движения. Реконструкция целевого изображения в целевое время Ttarget с помощью полученного 1940 MVF ниже описана подробно в отношении фиг. 20A к 21C.
Фиг. 20А и 20B являются представлениями для описания операции реконструкции целевого изображения. Избыточные описания с фиг. 18А и 19B опущены.
Реконструктор 720 изображения реконструирует целевое изображение в целевое время Ttarget посредством использования информации, указывающей движение объекта 1805, например, MVF.
Как описано выше, первая информация 2080 с фиг. 20B может быть получена посредством использования MVF1940. Поскольку первая информация совпадает с первой информацией, описанной на фиг. 13C, то ее подробное описание опущено. Степень движения объекта 1805 в целевое время может быть оценена посредством использования первой информации 2080. Альтернативно, состояние, включающее в себя по меньшей мере одно из размера, формы и положения объекта 1805 в целевое время Ttarget, может быть оценено посредством использования первой информации 2080.
Как описано выше на фиг. 19А и 19B, данные проецирования, полученные в каждой проекции или заранее заданном угловом сечении, включенном в угловое сечение за один цикл, вносят вклад в визуализацию различных других поверхностей или различных других областей объекта 1805.
В процессе реконструкции целевого изображения реконструктор 720 изображения может выполнять коррекцию движения посредством использования первой информации на части поверхности или области объекта 1805, который изображен с использованием данных проецирования, полученных во время, отличное от целевого времени Ttarget, за исключением части поверхности или области объекта 1805, который изображают с использованием данных проецирования, полученных в целевое время Ttarget.
На фиг. 20A, для удобства объяснения, угловое сечение за один цикл разделено на пять угловых сечений 2001, 2002, 2003, 2004 и 2005, и проиллюстрированы изображения, полученные посредством обратного проецирования данных проецирования, полученных в каждом из разделенных угловых сечений. Подробно, частичное изображение 2021 получают посредством обратного проецирования данных проецирования, полученных в первом угловом сечении 2001. Частичное изображение 2031 получают посредством обратного проецирования данных проецирования, полученных в третьем угловом сечении 2002. Частичное изображение 2041 получают посредством обратного проецирования данных проецирования, полученных в четвертом угловом сечении 2003. Частичное изображение 2051 получают посредством обратного проецирования данных проецирования, полученных в пятом угловом сечении 2004. Кроме того, частичное изображение 2061 получают посредством обратного проецирования данных проецирования, полученных во втором угловом сечении 2005.
На фиг. 20A первое угловое сечение 2001, второе угловое сечение 2005, частичное изображение 2021 и частичное изображение 2061 идентично соответствуют первому угловому сечению 1901, второму угловому сечению 1902, первому изображению 1910 и второму изображению 1920 с фиг. 19А и 19B, соответственно.
Обратимся к фиг. 20A; случай, в котором целевое время Ttarget установлено как среднее между первым временем t1 и вторым временем t2, описано в качестве примера. Как описано на фиг. 17, когда данные проецирования, полученные в угловом сечении, смежном с целевым временем Ttarget, подвергают обратному проецированию, только поверхности 2042, 2043, 2044 или 2045, размещенные в горизонтальном направлении, изображены на частичном изображении 2041. Поверхности, которые не изображены на частичном изображении 2041, изображены с использованием данных проецирования, полученных в угловом сечении, отличном от четвертого углового сечения 2003, включающем целевое время Ttarget, в угловом сечении за один цикл.
При визуализации поверхности, которая не изображена на частичном изображении 2041, реконструктор 720 изображения может выполнять коррекцию движению посредством использования первой информации в целях снижения нечеткости.
Подробно, поверхности или частичные области, показанные на частичном изображении 2021, полученные в первом угловом сечении 2001, корректируются в соответствии с MVF. Другими словами, при рассмотрении первой информации 2080, предполагается, что величина W движения в первом угловом сечении 2001 равна 0, и величина W1 движения объекта 1805 в целевое время Ttarget 2081 равна 0,5 (W1=0,5). Затем поверхность объекта 1805 в целевое время Ttarget 2081 может быть точно получена путем деформирования объекта 1805, включенного в частичное изображение 2021, соответствующее первому угловому сечению 2001, на величину движения W, равную 0,5 (W=0,5). Соответственно, скорректированное частичное изображение 2022 сгенерировано путем выполнения коррекции движения на частичном изображении 2021 на основании величины 2024 движения, сгенерированной со времени начала (t=0) до целевого времени Ttarget и в сравнении с суммарной величиной 2023 движения. Суммарная величина 2024 движения может соответствовать максимальной величине движения W, равной 1 (W=0) в первой информации 2080, и величина 2024 движения может соответствовать разности между величиной движения W1 в целевое время Ttarget 2081 и величиной движения W во время 0 (t=0), соответствующее первому угловому сечению 2001.
Коррекция движения выполняется на других угловых сечениях таким же образом, как в первом угловом сечении. Подробно, скорректированное частичное изображение 2032, которое было скорректировано путем выполнения коррекции движения на частичном изображении 2031, полученном посредством обратного проецирования данных проецирования, полученных в третьем угловом сечении 2002, на основании величины движения 2034, сгенерированной от третьего времени T12 до целевого времени Ttarget 2081, по сравнению с суммарной величиной 2023 движения.
Кроме того, скорректированное частичное изображение 2062 генерируется путем выполнения коррекции движения на частичном изображении 2061, полученном посредством обратного проецирования данных проецирования, полученных во втором угловом сечении 2005, на основании величины движения 2064, сгенерированной со времени окончания (t=end) до целевого времени Ttarget 2081, по сравнению с суммарной величиной 2023 движения. Кроме того, скорректированное частичное изображение 2052 генерируется путем выполнения коррекции движения на частичном изображении 2051, полученном посредством обратного проецирования данных проецирования, полученных в пятом угловом сечении 2004, на основании величины движения 2054, сгенерированной с пятого времени T14 до целевого времени Ttarget 2081, по сравнению с суммарной величиной 2023 движения.
Коррекция движения с использованием данных проецирования, полученных в некоторое время до целевого времени Ttarget 2081, и коррекция движения с помощью данных проецирования, полученных в некоторое время после целевого времени Ttarget 2081, может быть выполнена в противоположных направлениях. Подробно, если рассматривать первую информацию 2080, коррекция движения до целевого времени Ttarget 2081 выполняется в направлении 2085, в котором величина движения W возрастает, а коррекция движения после целевого времени Ttarget 2081 выполняется в направлении 2086, в котором уменьшается величина движения W. Соответственно, направления суммарной величины 2023 движения в первое время T1 и суммарная величина 2023 движения во второе время T2 проиллюстрированы как противоположные друг относительно друга.
Кроме того, первая информация включает в себя информацию о движениях изображенных поверхностей на частичном изображении 2021 и частичном изображении 2061. Соответственно, реконструктор 720 изображения может выполнять коррекцию движения путем деформирования поверхности или частичной области объекта 1805 в первом направлении, которое перпендикулярно направлению, в котором рентгеновское излучение проецируется в первом угловом сечении 2001 и втором угловом сечении 2005.
Целевое изображение, соответствующее целевому времени Ttarget, может быть реконструировано посредством использования скорректированных частичных изображений 2022, 2032, 2052 и 2062, и частичного изображения 2041, полученного в четвертом угловом сечении 2003, включающем целевое время Ttarget. Поскольку скорректированные частичные изображения 2022, 2032, 2052 и 2062 точно отражают состояние движения объекта 1805 в целевое время Ttarget, то генерация артефактов движения может быть уменьшена на целевом изображении, реконструированном путем выполнения коррекции движения с использованием описанной выше первой информации.
В случае, когда изображение реконструируют посредством томографического сканирования движущегося объекта без выполнения коррекции движения, может быть сгенерирована сильная нечеткость в части поверхности из-за данных проецирования, полученных во время, удаленное от целевого времени Ttarget. Подробно, поверхности, простирающиеся в горизонтальном направлении, изображены на частичном изображении 2041, полученном в четвертом угловом сечении 2003, включающем целевое время Ttarget 2081, и поверхности, простирающиеся в вертикальном направлении, которые не изображены на частичном изображении 2041, изображены на частичном изображении 2021 и частичном изображении 2061, соответствующим первому времени T1 и второму времени T2, соответственно, расположенным дальше всего от целевого времени Ttarget 2081. Как описано выше, вследствие движения объекта 1805, поверхности, изображенные на частичном изображении, 2021 полученном в первом угловом сечении 2001, которое является начальным угловым сечением, и частичном изображении 2061, полученном во втором угловом сечении 2005, которое является конечным угловым сечением, значительно отличаются в их положениях и размерах. Другими словами, нечеткость наиболее сильно генерируется на изображении, реконструированном с использованием данных проецирования, полученных в начальном угловом сечении, и данных проецирования, полученных в конечном угловом сечении. Соответственно, поверхности, простирающиеся в вертикальном направлении на целевом изображении Ttarget 2081, являются размытыми из-за поверхностей, имеющих различные положения и размеры и изображенных на частичном изображении 2021 и частичном изображении 2061. Подробно, когда среднее время между первым временем T1 и вторым временем T2 установлено в качестве целевого времени Ttarget, как проиллюстрировано на 18C, нечеткости 1881 и 1882 наиболее сильно генерируются на поверхностях, простирающихся в вертикальном направлении на подвергнутом обратному проецированию изображении 1880, которое является целевым изображением, как на 18D.
В одном из вариантов осуществления настоящего изобретения реконструктор 720 изображения может генерировать целевое изображение 2070 путем выполнения коррекции движения на частичных изображениях, полученных в угловом сечении за один цикл посредством использования первой информации, и, таким образом, артефакты движения могут быть уменьшены.
Кроме того, когда целевое время Ttarget 2081 установлено в середине между первым временем T1 и вторым временем T2, которые являются временем начала и временем конца углового сечения за один цикл, коррекция движения может быть эффективно выполнена на поверхностях 1881 и 1882, где нечеткость наиболее сильно генерируется на изображении, реконструированном в соответствии с целевым временем Ttarget 2081, и в результате могут быть уменьшены артефакты движения на реконструированном изображении. Соответственно, целевое время, Ttarget может быть установлено в середину времени углового сечения за один цикл, а коррекция движения может выполняться посредством использования первой информации, в результате чего строится целевое изображение, имеющее оптимизированное качество изображения.
Подробно, поскольку первую информацию получают посредством использования частичного изображения 2021 и частичного изображения 2061, которые генерируют с использованием данных проецирования, полученных в каждом из первого углового сечения 2001 и второго углового сечения 2005, первая информация наиболее точно включает в себя информацию о движениях, например, компонентов поверхностей 2025, 2026, 2027, и 2028 и 2065, 2066, 2067 и 2068, соответственно, включенных в частичное изображение 2021 и частичного изображения 2061. Соответственно, коррекция движения может быть точно выполнена на компонентах поверхностей 2025, 2026, 2027, и 2028 и 2065, 2066, 2067 и 2068, которые размещены вертикально относительно объекта 1805, путем выполнения коррекции движения на основании первой информации. Однако в первой информации информация о движениях компонентов поверхностей, включенная, например, в частичное изображение 2031, 2041 или 2051, сгенерированное на основании данных проецирования, полученных в проекции, включенной в сечение, отличное от первого углового сечения 2001 и второго углового сечения 2005, может быть менее точным, чем информация о движениях компонентов поверхностей 2025, 2026, 2027 и 2028, и 2065, 2066, 2067 и 2068, соответственно, включенных в частичное изображение 2021 и частичное изображение 2061.
Подробно, движения поверхностей, обнаруженные в первом угловом сечении 2001 и втором угловом сечении 2005, которые, являются, соответственно, начальным сечением и конечным сечением углового сечения за один цикл, имеют самую низкую корреляцию с движением поверхности, обнаруженной в угловом сечении, например, четвертом угловом сечении 2003, которое является ортогональным к первому угловому сечению 2001 и второму угловому сечению 2005. Соответственно, среди информации о движении поверхности объекта согласно первой информации, может оказаться, что ошибка будет являться самой большой в информации о движении компонента поверхности, включенного в изображение, например, частичное изображение 2041, сгенерированное с использованием данных проецирования, полученных в угловом сечении, например, четвертом угловом сечении 2003, которое является ортогональным к первому угловому сечению 2001 и второму угловому сечению 2005.
При установке целевого времени, когда четвертое время T13, которое является ортогональным к первому угловому сечению 2001 и второму угловому сечению 2005 и также является средним временем между первым угловым сечением 2001 и вторым угловым сечением 2005, установлено в качестве целевого времени, отсутствует необходимость выполнения коррекции движения на компоненте поверхности, например, компонентах поверхности 2042, 2043, 2044 и 2045, изображенных с использованием данных проецирования, полученных в четвертом угловом сечении 2003, которое является ортогональным к первому угловому сечению 2001 и второму угловому сечению 2005. Соответственно, влияние ошибки, которая может возникнуть при исправлении движения объекта, может быть уменьшено путем удаления ошибки, которая может возникнуть при выполнении коррекции движения на компоненте поверхности, например, компонентах поверхности 2042, 2043, 2044 и 2045, изображенных в угловом сечении, которое является ортогональным к первому угловому сечению 2001 и второму угловому сечению 2005. Соответственно, когда положение целевого времени Ttarget расположено в среднем положении между первым угловым сечением 2001 и вторым угловым сечением 2005, качество реконструированного целевого изображения может быть улучшено.
Кроме того, хотя фиг. 20A иллюстрирует случай, в котором угловое сечение за один цикл разделено на множество угловых сечений, а коррекция движения выполняется для каждого из подвергнутых обратному проецированию изображений, соответствующих угловым сечениям, в качестве примера. Кроме того, коррекция движения может быть выполнена на частичном изображении, полученном посредством обратного проецирования данных проецирования, полученных в каждой проекции, включенной в угловое сечение за один цикл. Также коррекция движения может быть выполнена в процессе обратного проецирования данных проецирования, полученных в каждой проекции. Кроме того, коррекция движения может быть выполнена на частичном изображении, полученном посредством обратного проецирования данных проецирования, полученных в группе проекций, включающей в себя несколько проекций. Также коррекция движения может быть выполнена в процессе обратного проецирования данных проецирования, полученных в группе проекций.
Кроме того, хотя фиг. 20A иллюстрирует случай выполнения коррекции движения на частичных изображениях, коррекция движения может быть выполнена на данных проецирования, соответствующих каждой проекции, и целевое изображение может быть реконструировано путем выполнения обратного проецирования с фильтрацией на исправленных данных проецирования, соответствующих каждой проекции.
Фиг. 2°C представляет собой реконструированное целевое изображение. Обратимся к фиг. 20C; объект содержит две круглых цели 2071 и 2072. Круглые цели 2071 и 2072 соответствуют первой цели 1806 и второй цели 1807, соответственно, включенным в объект 1805, проиллюстрированный на фиг. 20A. Обратимся к фиг. 20C; целевое изображение 2070, реконструированное реконструктором изображения 720 согласно одному из вариантов осуществления настоящего изобретения, показывает объект, когда целевое время Ttarget является средним временем между первым временем t1 и вторым временем t2.
Целевое 2070 изображение практически не имеет нечеткостей из-за артефактов движения и точно отражает состояние объекта в целевое время Ttarget.
Фиг. 21A является другим представлением для описания операции реконструкции целевого изображения.
Обратимся к фиг. 21A; опущено избыточное описание с фиг. 20A, потому что большинство частей являются практически такими же, как части на фиг. 20A, за исключением того, что время, которое не является средним временем углового сечения за один цикл, установлено в качестве целевого времени Ttarget.
Обратимся к фиг. 21A; время, например, третье время T12, которое не является средним временем углового сечения за один цикл, установлено в качестве целевого времени Ttarget.
Обратимся к фиг. 21A; скорректированное частичное изображение 2122 сгенерировано путем выполнения коррекции движения на частичном изображении 2121, на основании величины 2124 движения, сгенерированной от времени начала (t=0) до целевого времени Ttarget, по сравнению с суммарной величиной 2123 движения. Суммарная величина движения 2123 соответствует величине движения W, которая равна 1 (W=1) в первой информации 2180, показанной на фиг. 21B. Величина 2124 движения соответствует разности между величиной движения W во время начала (t=0) и величиной движения W2 в целевое время Ttarget 2181.
Коррекция движения выполняется на других угловых сечениях таким же образом, как в первом угловом сечении. Подробно, скорректированное частичное изображение 2142 сгенерировано путем выполнения коррекции движения на частичном изображении 2141, на основании величины движения 2144, сгенерированной с четвертого времени T13 до целевого времени Ttarget, по сравнению с суммарной величиной 2123 движения.
Кроме того, скорректированное частичное изображение 2152 генерируется путем выполнения коррекции движения на частичном изображении 2151 на основании величины движения 2154, сгенерированной с пятого времени T14 до целевого времени Ttarget, по сравнению с суммарной величиной 2123 движения. Кроме того, скорректированное частичное изображение 2162 генерируется путем выполнения коррекции движения на частичном изображении 2161, на основании величины движения 2164, сгенерированной со времени окончания (t=end) до целевого времени Ttarget, по сравнению с суммарной величиной 2123 движения.
Целевое изображение, соответствующее целевому времени Ttarget, может быть реконструировано посредством использования скорректированных частичных изображений 2122, 2142, 2152 и 2162, и частичного изображения 2131, полученного в третьем угловом сечении 2002, включающем целевое время Ttarget.
Фиг. 21C представляет собой реконструированное целевое изображение.
Обратимся к фиг. 21C, целевое изображение 2170, реконструированное реконструктором изображения 720 согласно одному из вариантов осуществления настоящего изобретения, показывает объект для случая, когда целевое время Ttarget не является средним временем между первым временем t1 и вторым временем t2, как проиллюстрировано на фиг. 21A.
Целевое изображение 2170 практически не имеет нечеткостей из-за артефактов движения.
Однако качество целевого изображения 2170, реконструированного в случае, когда целевое время Ttarget не является средним временем между первым временем t1 и вторым временем t2, может быть ниже, чем качество целевого изображения 2070, реконструированного, когда целевое время Ttarget является средним временем между первым временем t1 и вторым временем t2. Например, когда целевое изображение 2170 и изображение 2070 сравнивают друг с другом, можно заметить, что формы первой цели 2171 и второй цели 2172, включенных в объект, частично деформированы. Подробно, на целевом изображении 2170 форма более низкой поверхности первой цели 2171 выглядит немного искаженной.
Другими словами, на целевом изображении степень коррекции движения объекта, включенного в целевое изображение, может изменяться согласно целевому времени Ttarget. Подробно, с приближением целевого времени Ttarget к среднему времени между первым временем t1 и вторым временем t2, коррекция движения выполняется лучше и, таким образом, целевое изображение может стать изображением, лучше отражающим состояние объекта в целевое время Ttarget. Напротив, когда целевое время Ttarget не является средним временем между первым временем t1 и вторым временем t2, коррекция движения выполняется плохо и, таким образом, целевое изображение может неточно отражать состояние объекта в целевое время Ttarget по сравнению со случаем, в котором целевое время Ttarget является средним временем между первым временем t1 и вторым временем t2.
Соответственно, на реконструированном целевом изображении коррекция движения объекта может быть выполнена лучше, когда целевое время Ttarget соответствует среднему времени между первым временем t1 и вторым временем t2, по сравнению со случаем, в котором целевое время Ttarget не соответствует среднему времени между первым временем t1 и вторым временем t2.
С точки зрения качества изображения качество реконструированного изображения может изменяться в соответствии с положением или проекцией в угловом сечении за один цикл, для которого установлено целевое время Ttarget. «Качество изображения» может изменяться в соответствии с тем, насколько ясно изображение показывает состояние объекта в определенное время. Например, качество изображения может соответствовать степени деформации объекта. Кроме того, например, можно сказать, что изображение, точно отражающее состояние объекта в определенное время, имеет превосходящее качество изображения. Напротив, можно сказать, что изображение, не отражающее точно состояние объекта в определенное время так, что по меньшей мере одно из положения, формы и размера объекта отличается от аналогичных параметров объекта в определенное время, имеет плохое качество изображения. Подробно, как проиллюстрировано на фиг. 2°C и 21C, качество реконструированного изображения оптимально, когда целевое время является средним временем между первым временем t1 и вторым временем t2.
Фиг. 22А и 22B являются представлениями для описания операции деформации, применяемой для реконструкции целевого изображения.
Для реконструкции целевого изображения реконструктор 720 изображения выполняет обратное проецирование, то есть отражает отфильтрованные данные проецирования, полученные во множестве проекций, включенных в угловое сечение за один цикл в области изображения 2201, указывающей объект. В приведенном ниже описании обратное проецирование выполняется на частичной области 2202, включенной в область 2201 изображения. Область 2202, как проиллюстрировано на фиг. 22А и 22B, может представлять собой данные изображения, включающие в себя пиксельные значения или изображение, представленное пиксельными значениями. Кроме того, область 2202 может представлять собой пространство изображения для визуализации объекта. На фиг. 22А и 22B, случай, в котором отфильтрованные данные 2210 проецирования, полученные при проецировании рентгеновского излучения в направлении 2211 в первое время T1, которое является временем начала углового сечения за один цикл, посредством обратного проецирования, описаны в качестве примера. Данные изображения, включенные в область 2202, могут называться подвергнутыми обратному проецированию данными проецирования.
Обратимся к фиг. 22B, реконструктор 720 изображения может деформировать сетку изображения, сформированную из множества пикселей, в целях визуализации объекта согласно величине движения объекта в целевое время Ttarget на основании первой информации, и может реконструировать целевое изображение посредством использования деформированной сетки изображения.
Подробно, обратимся к фиг. 22А и 22B; отфильтрованные данные 2210 проецирования отражены на сетку изображения, включенную в отфильтрованные данные 2210 проецирования. Отражение отфильтрованных данных 2210 проецирования на сетку изображения, которая представляет собой пространство изображения, называется обратным проецированием.
Соответственно, область 2202 заполнена пиксельными значениями 2213, как проиллюстрировано на фиг. 22A. Когда объектом не сгенерированы какое-либо движения, на реконструированном целевом изображении не могут быть сгенерированы артефакты движения, даже если изображение изображено при кумулятивном отражении отфильтрованных данных 2210 проецирования согласно каждой проекции на сетку изображения. Однако когда во время углового сечения за один цикл объектом сгенерировано движение, различия между поверхностями, указывающими одну и ту же часть объекта, генерируются во множестве фрагментов отфильтрованных данных проецирования, полученных в каждой проекции. Соответственно, когда отфильтрованные данные 2210 проецирования согласно каждой проекции кумулятивно отражаются на сетке изображения в целях визуализации изображения, артефакты движения могут быть сгенерированы на реконструированном целевом изображении.
В настоящем варианте осуществления в целях сокращения артефактов движения движущегося объекта, выполняется коррекция движения в соответствии с описанным в отношении фиг. 20А и 21А. В приведенном ниже описании деформирование сетки изображения реконструктором 720 изображения в целях коррекции движения описано подробно.
Реконструктор 720 изображения деформирует сетку 2230 изображения в целях визуализации той же самой части, что и область 2202, согласно MVF, указывающему величину движения объекта до целевого времени Ttarget в области 2202, посредством использования первой информации, например, информации MVF, указывающей движение объекта. Например, верхняя левая область на сетке 2230 изображения может быть деформирована согласно векторам 1941.
Затем генерируется сетка 2240 изображения, полученная путем деформации сетки 2230 изображения. Реконструктор 720 изображения отражает пиксельные значения, включенные в отфильтрованные данные 2210 проецирования, на сетку 2240 изображения, которая была деформирована. Соответственно, пиксельные значения включены в область 2235, идентично соответствующую области 2202, как проиллюстрировано на фиг. 22B. В области 2235 прямоугольная сетка 2241 изображения, представленная как пунктирная сетка, указывает общую сетку изображения, которая не была деформирована.
Затем, реконструктор 720 изображения передискретизирует область 2235, содержащую пиксельные значения согласно деформированной сетке 2240 изображения, в область 2245, содержащую пиксельные значения согласно прямоугольной сетке 2241 изображения. Подробно, пиксельные значения согласно деформированной сетке 2240 изображения интерполируются посредством использования квадратичной пиксельной матрицы изображения и преобразуются к пиксельным значениям согласно декартовым координатам.
В приведенном ниже описании случай передискретизации пиксельных значений пикселей 2242 и 2243, включенных в деформированную 2240 сетку изображения, в пиксельное значение 2254, включенное в прямоугольную сетку 2241 изображения, описано в качестве примера. Пиксель 2242, включенный в деформированную сетку 2240 изображения, имеет значение сигнала «2», а пиксель 2243 имеет значение сигнала «1». Другими словами, поскольку значение сигнала изображения, включенное во всю область пикселя 2242, равняется 2, то значение сигнала «2» включено в пиксель 2242 путем распределения при степени расширения пикселя 2242. Соответственно, значение сигнала «1» может быть включено в частичную область 2261, соответствующую половине всей области пикселя 2242. Кроме того, поскольку значение сигнала изображения, включенное во всю область пикселя 2243, равняется 1, значение сигнала «1» включено в пиксель 2243 путем распределения при степени расширения пикселя 2243. Соответственно, значение сигнала «0,5» может быть включено в частичную область 2262, соответствующую половине всей области пикселя 2243. Кроме того, значение сигнала «1,5», которое представляет собой сумму значения сигнала «1» из частичной области 2261 и значения сигнала «0,5» из частичной области 2262, может быть включено в пиксель 2254 согласно прямоугольным сеткам 2241 и 2251 изображения, включающим частичную область 2261 и частичную область 2262.
Соответственно, пиксельные значения 2255 размещены в области 2245, подвергнутой передискретизации, согласно прямоугольной сетке 2251 изображения. Соответственно, пиксельные значения 2255, включенные в область 2245, могут быть сгенерированы путем передискретизации всех пиксельных значений, включенных в область 2235.
Кроме того, в дополнение к приведенному выше способу, различные способы могут применяться в качестве способа преобразования пиксельных значений, размещенных согласно деформированной сетке изображения, к пиксельным значениям, размещенным согласно прямоугольной сетке изображения.
Кроме того, коррекция движения может быть выполнена посредством применения деформирования относительно каждого из всех фрагментов подвергнутых обратному проецированию данных проецирования, соответствующих множеству проекций, включенных в угловое сечение за один цикл. Целевое изображение может быть реконструировано путем накопления подвергнутых обратному проецированию данных проецирования, на которых выполняется коррекция движения.
Кроме того, коррекция движения посредством деформирования сетки изображения может быть выполнена не для каждой проекции, но коррекция движения может быть выполнена для каждой группы для заранее заданного углового сечения, включающего множество проекций.
Как в приведенном выше примере, реконструктор 720 изображения может генерировать скорректированные по движению данные 2270 изображения посредством использования сетки изображения, деформированной на основании первой информации.
Фиг. 23А и 23B являются представлениями для описания операции деформации, используемой для реконструкции целевого изображения. На фиг. 23А и 23B избыточное описание с фиг. 22А и 22B опущено.
Подробно, реконструктор 720 изображения может генерировать скорректированное по движению целевое изображение путем деформирования подвергнутого обратному проецированию изображения согласно первой информации. Подробно, в процессе обратного проецирования реконструктор 720 изображения может реконструировать целевое изображение путем деформирования пикселя, соответствующего данным, полученным посредством томографического сканирования, на основании первой информации. Подробно, реконструктор 720 изображения может деформировать пиксель на основании величины движения объекта в целевое время Ttarget согласно MVF.
Обратимся к фиг. 23А и 23B; пиксели изображения (или данные изображения) 2330, сгенерированные посредством обратного проецирования отфильтрованных данных 2210 проецирования, деформируются на основании информации MVF 1940. Соответственно, пиксельные значения 2331, включенные в изображение 2330, генерируются в деформированное изображение 2335, соответствующее объекту в целевое время Ttarget, на основании 1941 MVF. Подробно, пиксельное значение «2» отфильтрованных данных 2311 проецирования соответствует пиксельному значению «2» 2336 в третьем столбце деформированного изображения 2335. Пиксельное значение «2» отфильтрованных данных 2312 проецирования соответствует пиксельным значениям «2» 2337 в четвертом столбце деформированного изображения 2335.
Деформированное изображение 2335 генерирует скорректированное по движению изображение 2355 путем передискретизации в способе, описанном на фиг. 22B. Пиксельные значения 2356, включенные в скорректированное по движению изображение 2355, точно отражают движение объекта в целевое время Ttarget. Соответственно, артефакты движения на реконструированном в результате целевом изображении могут быть сокращены.
Фиг. 24А и 24B являются представлениями для описания операции реконструкции целевого изображения. На фиг. 24А и 24B избыточные описания с фиг. 22А-23B опущены. Реконструктор 720 изображения может выполнять коррекцию движения в процессе обратного проецирования на основании первой информации. Подробно, реконструктор 720 изображения может деформировать центр воксела, указывающего объект, на основании первой информации, и может реконструировать целевое изображение посредством обратного проецирования положения деформированного воксела. Воксел указывает одну единицу пространства в виртуальном 3D-пространстве сетки для визуализации объекта. На фиг. 24А и 24B случай, в котором виртуальное 3D-пространство сетки для отображения объекта проиллюстрировано с помощью пикселей, формирующих 2D-пространство сетки, вместо вокселов, формирующих 3D-пространство сетки, проиллюстрировано в качестве примера.
Подробно, реконструктор 720 изображения может находить, какие из значений пикселей во множестве детекторов должны указываться, посредством использования MVF с целевого времени Ttarget до каждого времени, когда на пиксельное значение в заранее заданном положении на изображении, которое будет реконструироваться, оказывает влияние движение в каждый из моментов времени. С учетом воксела, указывающего объект в целевое время Ttarget, для того, чтобы выполнить обратное проецирование отфильтрованных данных проецирования в проекции, отличной от целевого времени Ttarget, в направлении воксела, место назначения воксела, в которое воксел перемещается в соответствующее время, вычисляется путем отражения движения объекта. Величина движения воксела для коррекции движения объекта может быть вычислена посредством использования обратного MVF для MVF от соответствующего времени до целевого времени Ttarget. Значение пикселя во множестве детекторов, которое будет использоваться после перемещения положения воксела согласно вычисленной величине коррекции, может быть вычислено.
Подробно, обратимся к фиг. 24А и 24B; реконструктор 720 изображения выполняет инверсию поля на MVF, указывающем величину движения объекта в целевое время Ttarget, и генерирует инвертированное поле MVF 2410. Положение каждого пикселя на подвергнутом обратному проецированию изображении 2420 перемещают посредством использования инвертированного поля MVF 2410.
Например, положения пикселей на подвергнутом обратному проецированию изображении 2420 перемещают на основании векторов 2411, 2421, 2422 и 2423 движения, включенных в инвертированное поле MVF 2410. Подробно, пиксель в первом ряду и шестом столбце на подвергнутом обратному проецированию изображении 2420 перемещается в соответствии со стрелкой 2431 на основании вектора 2421 и вектора 2422. Пиксель в пятом ряду и шестом столбце на подвергнутом обратному проецированию изображении 2420 перемещается в соответствии со стрелкой 2432 на основании вектора 2423 движения. Кроме того, положение пикселя в области 2427 инвертированном поле MVF 2410, где какое-либо движение не было обнаружено, остается тем же.
Затем, реконструктор 720 изображения вычисляет, какое положение множества детекторов соответствует пиксельному значению в определенном пикселе, когда пиксельное значение определенного пикселя проецируется на основании перемещенного положения пикселя, и берет отфильтрованные данные 2210 проецирования в вычисленном положении для накопления значения в определенном пикселе, таким образом, получая подвергнутое обратному проецированию изображение 2420.
Например, если рассматривать перемещенное положение 2431, центр пикселя 2451 в первом ряду и шестом столбце на подвергнутом обратному проецированию изображении 2450, получают посредством использования пиксельного значения в положении P1 в отфильтрованных данных 2210 проецирования. Положение P1 не расположено в центре пикселя 2456 в первом ряду и шестом столбце в отфильтрованных данных 2210 проецирования, но расположено близко к пикселю 2455 в первом ряду и пятом столбце, в результате чего на него оказывает влияние пиксель 2456 и пиксель 2455. Соответственно, пиксель 2451 может иметь значение «0,2», поскольку на него влияет пиксель 2456, имеющий значение «0», и пиксель 2455, имеющий значение «1», как проиллюстрировано на фиг. 24B.
Кроме того, аналогично центр пикселя 2452 в пятом столбце и шестом столбце на подвергнутом обратному проецированию изображении 2450 расположен на поверхности пикселя 2452 и пикселя 2457, которые граничат друг с другом, в соответствии с движением 2432 пикселя, как проиллюстрировано на фиг. 24B. Соответственно, на пиксель 2451 оказывает влияние пиксель 2456 и пиксель 2455. Соответственно, пиксель 2451 может иметь значение «0,5», которое является средним значением между пикселем 2456, имеющим значение «0» и пикселем 2455, имеющим значение «1».
Как описано выше, реконструктор 720 изображения может получать скорректированное по движению целевое изображение 2470, которое представляет собой скорректированное по движению подвергнутое обратному проецированию изображение, посредством деформирования воксела посредством применения инвертированного поля MVF, а не посредством применения деформирования, описанного в отношении фиг. 22А-23B.
Фиг. 25А и 25B являются представлениями для описания реконструированных целевых изображений. Фиг. 25A иллюстрирует томографическое изображение 2510, полученное посредством способа половинной реконструкции, описанного в отношении фиг. 18А-18E. Фиг. 25B иллюстрирует томографическое изображение 2560, которое корректируется по движению посредством использования первой информации согласно одному из вариантов осуществления настоящего изобретения. Кроме того, фиг. 25B иллюстрирует томографическое изображение 2560, когда целевое время Ttarget является средним временем между первым временем t1 и вторым временем t2.
Обратимся к фиг. 25A; нечеткости 2511 и 2512 сгенерированы в первой цели 2501 объекта, включенного в томографическое изображение 2510, и нечеткости 2521 и 2522 сгенерированы во второй цели 2502.
Напротив, если обратиться к фиг. 25B, на томографическом изображении 2560, реконструированном в томографическом аппарате 700 согласно одному из вариантов осуществления настоящего изобретения, можно заметить, что какие-либо нечеткости не сгенерированы в первой цели 2501 и второй цели 2502.
Фиг. 26 является представлением для описания измерения величины движения объекта.
Когда получатель 710 данных получает первое изображение и второе изображение, поскольку значение «a» в первом угловом сечении и втором угловом сечении возрастает, временные разрешения первого изображения и второго изображения могут быть ухудшены.
В целях предотвращения ухудшения временного разрешения первого изображения и второго изображения, когда томографическое сканирование выполняется путем проецирования рентгеновского излучения в то время, как генератора 106 рентгеновского излучения вращается вокруг объекта согласно способу половинной реконструкции, множество изображений получают во множестве угловых сечений, включенных в первое «a» угловое сечение 2611, которое является начальным дополнительным угловым сечением углового сечения за один цикл, и множество изображений получают во множестве угловых сечений, включенных в последнее «a» угловое сечение 2612, которое является последним дополнительным угловым сечением углового сечения за один цикл. Первая информация может быть получена посредством использования полученных изображений. На фиг. 26 случай, в котором каждое первое «a» угловое сечение 2611, соответствующее первому угловому сечению 1411 с фиг. 14, а последнее «a» угловое сечение 2612, соответствующее второму угловому сечению 1412 с фиг. 14, разделено на два угловых сечения, проиллюстрирован в качестве примера.
Обратимся к фиг. 26; получатель 710 данных получает первое изображение и третье изображение, соответственно, в первом угловом сечении 2621 и третьем угловом сечении 2631, которые включены в первое «a» угловое сечение 2611 углового сечения за один цикл, имеющего угол 180+a. Первое угловое сечение 2621 может соответствовать первому «a/2» первого «a» углового сечения 2611, а третье угловое сечение 2631 может соответствовать последнему «a/2» первого «a» углового сечения 2611. Получатель 710 данных получает второе изображение и четвертое изображение, соответственно, во втором угловом сечении 2622 и четвертом угловом сечении 2632, которые включены в последнее «a» угловое сечение 2612 углового сечения за один цикл. Второе угловое сечение 2622 может соответствовать первому «a/2» последнего «a» углового сечения 2612, а четвертое угловое сечение 2632 может соответствовать последнему «a/2» последнего «a» углового сечения 2612. Первая информация, указывающая зависимость между временем и величиной движения объекта, может быть получена на основании величины движения между первым изображением и вторым изображением и величины движения между третьим изображением и четвертым изображением. Первое угловое сечение 2621 и второе угловое сечение 2622 являются угловыми сечениями, имеющими отношение парного угла. Третье угловое сечение 2631 и четвертое угловое сечение 2632 являются угловыми сечениями, имеющими отношение парного угла.
Кроме того, получатель 710 данных может разделять каждое из первого «a» углового сечения 2621 и последнего «a» углового сечения 2612 на три или более угловых сечения, и может получать первую информацию посредством использования изображения, реконструированного по каждому из угловых сечений.
Поскольку генерация первой информации посредством использования этих двух изображений, полученных в двух угловых сечениях, имеющих отношение парного угла, уже описана в отношении фиг. 13, подробное описание этого опущено.
Фиг. 27 является представлением для описания артефактов движения, существующих на реконструированном томографическом изображении.
Обратимся к фиг. 27; блок 2701 иллюстрирует томографические изображения, реконструированные томографическим аппаратом уровня техники, а блок 2705 иллюстрирует томографические изображения, реконструированные томографическими аппаратами 600 и 700 согласно вариантам осуществлениям настоящего изобретения.
Обратимся к томографическому изображению поперечного сечения 2710 блока 2701; артефакты движения сгенерированы вследствие движения коронарной артерии 2711 в части, где отображена коронарная артерия 2711, и в результате изображение является нечетким. Кроме того, нечеткость сгенерирована на поверхности 2712 вследствие движения органа.
Кроме того, на томографическом изображении 2720 поперечного сечения нечеткость сгенерирована в горизонтальном сечении 2721 кровеносного сосуда, включающего коронарную артерию 2711, в результате чего кровеносный сосуд не реконструирован ясно. Кроме того, на томографическом изображении 2730 поперечного сечения, нечеткость сгенерирована в части 2731, где отображен кровеносный сосуд, включающий коронарную артерию 2711, в результате чего кровеносный сосуд не реконструирован ясно.
Напротив, на томографическом изображении 2750 поперечного сечения, реконструированного в томографических аппаратах 600 и 700 согласно вариантам осуществления настоящего изобретения, часть, где отображена коронарная артерия 2751, реконструирована ясно, и таким образом, поверхность 2752 органа реконструирована ясно.
Кроме того, на томографическом изображении 2760 поперечного сечения горизонтальное поперечное сечение 2761 кровеносного сосуда, включающего коронарную артерию 2751, реконструировано ясно, и на томографическом изображении 2770 поперечного сечения, где отображен кровеносный сосуд, включающий коронарную артерию 2751, он реконструирован ясно.
Как описано выше, в одном из вариантов осуществления настоящего изобретения первое изображение и второе изображение, имеющие высокое временное разрешение, могут быть получены путем получения первого изображения и второго изображения в частичных угловых сечениях, включенных в угловое сечение за один цикл. Поскольку величину движения объекта измеряют посредством использования первого изображения и второго изображения, имеющих временное разрешение, первая информация, указывающая зависимость между временем и величиной движения объекта, может более точно отразить изменение в движении объекта. Кроме того, поскольку изображение в целевое время Ttarget реконструируют посредством использования первой информации, то изображение, имеющее сокращенные артефакты движения, может быть реконструировано.
Фиг. 28 является представлением для описания артефактов движения, существующих на реконструированном томографическом изображении.
Обратимся к фиг. 28; для случая, когда относительное время, указывающее время между пиками R-R ECG выражено в процентах (%), проиллюстрированы томографические изображения, реконструированные посредством использования относительных времен, составляющих 0%, 20% и 40%, в качестве целевого времени Ttarget. Например, если время между пиками R-R составляет 0,2 секунды, то относительное время составляет 0,2 секунды, и 20% относительного времени составляет (0,2*20/100)=0,04 секунды. Подробно, блок 2810 иллюстрирует томографические изображения, реконструированные томографическим аппаратом уровня техники, и блок 2850 иллюстрирует томографические изображения, реконструированные томографическими аппаратами 600 и 700 согласно одному из вариантов осуществления настоящего изобретения. В приведенном ниже описании томографические изображения, включенные в блок 2810, называются «томографическими изображениями уровня техники», а томографические изображения, включенные в блок 2850, называются «томографическими изображениями по настоящему изобретению».
Обратимся к фиг. 28; когда томографическое изображение 2820 уровня техники и томографическое изображение 2860 по настоящему изобретению сравнивают друг с другом во время, когда относительное время составляет 0%, множество областей 2821 и 2822, где нечеткость сгенерирована из-за артефактов движения, присутствует на томографическом изображении 2830 уровня техники, тогда как на томографическом изображении 2860 по настоящему изобретению артефакты движения значительно сокращены в областях 2861 и 2862, идентично соответствующим областям 2821 и 2822, в которых была сгенерирована нечеткость.
Кроме того, когда томографическое изображение 2830 уровня техники и томографическое изображение 2870 по настоящему изобретению сравнивают друг с другом во время, когда относительное время составляет 20%, область 2831, где нечеткость сгенерирована из-за артефактов движения, присутствует на томографическом изображении 2830 уровня техники, тогда как на томографическом изображении 2870 по настоящему изобретению, артефакты движения значительно сокращены в области 2871, идентично соответствующей области 2831, в которой была сгенерирована нечеткость.
Кроме того, когда томографическое изображение 2840 уровня техники и томографическое изображение 2880 по настоящему изобретению сравнивают друг с другом во время, когда относительное время составляет 40%, множество областей 2841, где нечеткость сгенерирована из-за артефактов движения, присутствует на томографическом изображении 2840 уровня техники, тогда как на томографическом изображении 2880 по настоящему изобретению, артефакты движения значительно сокращены в области 2881, идентично соответствующей области 2841, в которой была сгенерирована нечеткость.
Фиг. 29А и 29B иллюстрируют экраны пользовательского интерфейса, отображаемые на томографическом аппарате, согласно вариантам осуществлениям настоящего изобретения.
Обратимся к фиг. 29A; устройство отображения 740 отображает экран 2900 пользовательского интерфейса для установки первой информации. Подробно, экран 2900 пользовательского интерфейса содержит первое меню 2930 для установки зависимости между временем и величиной движения объекта в первой информации.
Кроме того, экран 2900 пользовательского интерфейса может также содержать второе меню 2901 для отображения первой информации. Поскольку первая информация, отображенная во втором меню 2901, идентично соответствует первой информации 1380, описанной в отношении фиг. 13C, опущено избыточное описание с фиг. 13C.
Первое меню 2930 может включать в себя подменю 2935 для установки зависимости между временем и величиной движения объекта. В подменю 2935 может быть выбрана любая из зависимостей, включенных в подменю 2935, или уравнение для установки зависимости может быть введено непосредственно, в соответствии с тем, является ли зависимость между временем и величиной движения объекта линейной или квадратичной.
Кроме того, первое меню 2930 может также включать в себя второе подменю 2931 для установки углового значения первого углового сечения и второго углового сечения. Соответственно, пользователь может непосредственно установить угловое значение первого углового сечения и второго углового сечения посредством использования второго подменю 2931.
На фиг. 29A случай, в котором зависимость между временем и величиной движения объекта является линейной в подменю 2935, проиллюстрирован в качестве примера.
Кроме того, пользовательский интерфейс 750 принимает ввод второй информации, соответствующей зависимости между временем и величиной движения объекта, через экран 2900 пользовательского интерфейса. Подробно, когда пользователь выбирает пункт «линейная» в подменю 2935 экрана 2900 пользовательского интерфейса, получатель 710 данных генерирует первую информацию на основании второй информации. В описанном выше примере, когда выбран пункт «линейный», получатель 710 данных может генерировать первую информацию 2920 на основании линейной зависимости между временем и величиной движения объекта.
Кроме того, хотя фиг. 29А и 29B иллюстрируют случай, в котором устройство отображения 740 отображает экран пользовательского интерфейса в качестве примера, экран пользовательского интерфейса, используемый на фиг. 29А и 29B, может быть сгенерирован пользовательским интерфейсом 750 и передан на внешнее устройство отображения (не показано), которое не включено в томографический аппарат 700. Затем внешнее устройство отображения может отображать принятый экран пользовательского интерфейса и пользователь, наблюдающий отображенный экран пользовательского интерфейса, может вводить информацию для установки первой информации через пользовательский интерфейс 750.
Кроме того, фиг. 29B иллюстрирует другой пример экрана пользовательского интерфейса для установки первой информации.
Обратимся к фиг. 29B; устройство отображения 740 отображает экран 2950 пользовательского интерфейса для установки первой информации. Подробно, экран 2950 пользовательского интерфейса содержит первое меню 2955 для установки зависимости между временем и величиной движения объекта в первой информации. Второе меню 2901 с фиг. 29B идентично второму меню 2901 с фиг. 29A.
Обратимся к фиг. 29B; первое меню 2955 может включать в себя первое подменю 2970 для установки зависимости между временем и величиной движения объекта. Первое подменю 2970 включает в себя по меньшей мере один из пунктов 2971, 2972, 2973 и 2974, непосредственно отображающих первую информацию, как проиллюстрировано на фиг. 29B.
Пользователь может выбрать любой из пунктов 2971, 2972, 2973 и 2974, включенных в первое подменю 2970, посредством использования курсора 2982 выбора. Фиг. 29B иллюстрирует случай, в котором выбран первый пункт 2971. Поскольку выбран первый пункт 2971, первая информация 2920 может быть установлена во втором меню 2901, как проиллюстрировано на фиг. 29B.
Кроме того, первое меню 2950 может также включать в себя второе подменю 2960 для установки углового значения первого углового сечения и второго углового сечения. Второе подменю 2960 включает в себя множество заранее заданных угловых значений, как проиллюстрировано на фиг. 29B. Пользователь может выбрать любое из угловых значений, включенных во второе подменю 2960, посредством использования курсора 2981 выбора. Фиг. 29B иллюстрирует случай, в котором пункт «60» выбран во втором подменю 2960 в качестве углового значения первого углового сечения и второго углового сечения.
В дополнение к экранам 2900 и 2950 пользовательского интерфейса с фиг. 29А и 29B, экраны пользовательского интерфейса, имеющие множество форм для установки первой информации, могут быть сгенерированы и отображены.
Кроме того, получатель 710 данных может автоматически устанавливать угловое значение первого углового сечения и второго углового сечения. Кроме того, получатель 710 данных может автоматически устанавливать форму графика первой информации.
Фиг. 30 является представлением, иллюстрирующим экран пользовательского интерфейса, отображаемый на томографическом аппарате, согласно одному из вариантов осуществления настоящего изобретения.
Обратимся к фиг. 30; устройство отображения 740 может отображать экран 3000 пользовательского интерфейса, содержащий меню для установки целевого времени Ttarget.
Обратимся к фиг. 30; меню может включать в себя по меньшей мере одно из первого подменю 3020 и второго подменю 3030 для установки целевого времени Ttarget.
Подробно, первое подменю 3020 может включать угловое сечение за один цикл вокруг объекта 3022 в форме координат, как проиллюстрировано на фиг. 30. Пользователь может выбрать целевое время Ttarget путем выбора заранее заданного положения или времени, включенного в угловое сечение за один цикл, через первое подменю 3020 посредством использования курсора 3021.
Кроме того, второе подменю 3030 может содержать информацию, указывающую угловое сечение за один цикл, включая первую информацию. Поскольку второе подменю 3030 идентично соответствует содержанию, проиллюстрированному на фиг. 13C, избыточное описание с фиг. 13C опущено. Пользователь может выбирать целевое время Ttarget путем выбора заранее заданного положения или времени, включенного в угловое сечение за один цикл, через второе подменю 3030 посредством использования курсора 3031.
Кроме того, когда отображено как первое подменю 3020, так и второе подменю 3030 путем включения в экран 3000 пользовательского интерфейса, а целевое время Ttarget выбрано посредством использования, например, курсора 3021 в первом подменю 3020, курсор 3031 во втором подменю 3030 может быть отображен в положении, соответствующем выбранному целевому времени. Также целевое время Ttarget может быть выбрано посредством использования курсора 3031 во втором подменю 3030, а курсор 3021 в первом подменю 3020 может быть отображен в положении, соответствующем выбранному целевому времени.
Кроме того, экран 3000 пользовательского интерфейса может отображать целевое изображение 3010, соответствующее выбранному целевому времени.
Соответственно, пользователь может легко установить целевое время посредством использования экрана 3000 пользовательского интерфейса. Когда неясная поверхность или ошибка изображения присутствуют на реконструированном целевом изображении 3010, пользователь может наблюдать реконструированное целевое изображение 3010, включенное в экран 3000 пользовательского интерфейса, и переустанавливать целевое время. Соответственно, целевое изображение 3010, в котором уменьшены неясная поверхность или ошибка изображения, может быть реконструировано снова.
Фиг. 31А и 31B являются представлениями, иллюстрирующими экран пользовательского интерфейса, показанный на томографическом аппарате, согласно одному из вариантов осуществления настоящего изобретения. Подробно, фиг. 31A является представлением для описания установки области исследования (ROI). Фиг. 31B иллюстрирует конфигурацию для установки положения или угла обзора первого углового сечения и второго углового сечения в соответствии с установленной ROI.
Устройство отображения 740 может отображать медицинское изображение. Медицинское изображение может представлять собой различные медицинские изображения, такие как предварительный рентгеновский снимок, томографическое изображение, изображение МРТ, рентгеновское изображение или ультразвуковое изображение.
Пользователь может устанавливать заранее заданную область медицинского изображения в качестве ROI через пользовательский интерфейс 750.
Обратимся к фиг. 31A; томографическое изображение 3110 поперечного сечения проиллюстрировано в качестве примера медицинского изображения 3100, отображенного на устройстве отображения 740.
Пользователь может устанавливать ROI через пользовательский интерфейс 750. Кроме того, получатель 710 данных может автоматически извлекать часть, нуждающуюся в точной интерпретации изображения, такую как предполагаемая область заболевания на медицинском изображении, и может устанавливать извлеченную часть в качестве ROI.
Получатель 710 данных может извлекать поверхность, включенную в ROI, и может устанавливать первое угловое сечение и второе угловое сечение на основании направления извлеченной поверхности. Подробно, получатель 710 данных может извлекать поверхности 3171 и 3172, включенные в ROI, и может получать угол обзора, соответствующий извлеченной области. По меньшей мере одно из первого углового сечения, второго углового сечения, положения начала углового сечения за один цикл, положения конца углового сечения за один цикл и целевое времени устанавливают в соответствии с полученным углом обзора, и первое изображение и второе изображение могут быть получены, соответственно, в первом угловом сечении и втором угловом сечении, соответствующим описанной выше конфигурации.
Как описано в отношении фиг. 16 и 17, направление поверхности, которая отчетливо выбирается, изменяется согласно направлению, в котором происходит облучение рентгеновским пучком. Соответственно, поверхности, включенные в ROI 3120, могут быть более отчетливо выбраны путем настройки направления пучка рентгеновского излучения согласно направлению поверхности, включенной в ROI 3120.
Подробно, обратимся к фиг. 31B; получатель 710 данных может устанавливать направления 3161 и 3162, соответствующие поверхностям 3171 и 3172, включенным в ROI 3120, или углу обзора генератора 106 рентгеновского излучения. Положения первого углового сечения и второго углового сечения устанавливают в соответствии с установленным направлением или углом обзора. Например, когда направления, в которых простираются поверхности 3171 и 3172, являются направлениями 3161 и 3162, первое угловое сечение 3151 и второе угловое сечение 3152 могут быть установлены как соответствующие направлениям 3161 и 3162. Соответственно, первое изображение получают путем проецирования рентгеновского излучения с левой стороны ROI 3120, а второе изображение может быть получено путем проецирования рентгеновского излучения с правой стороны ROI 3120.
Получатель 710 данных может генерировать первую информацию посредством использования первого изображения и второго изображения.
Как описано выше, когда первое угловое сечение 3151 и второе угловое сечение 3152 установлены на основании направлений поверхностей 3171 и 3172, включенных в ROI 3120, поверхности 3171 и 3172, включенные в ROI 3120, могут быть более отчетливо выбраны, в результате чего качество реконструированного изображения может быть улучшено.
Кроме того, реконструктор 720 изображения может устанавливать по меньшей мере одно из первого углового сечения, второго углового сечения, начальной части углового сечения за один цикл (угловое положение, соответствующее t=0), положения конца углового сечения за один цикл (угловое положение, соответствующее t=end) и целевого времени Ttarget с учетом направления, в котором движется объект. Например, первое угловое сечение и второе угловое сечение могут быть установлены таким образом, чтобы измерение движения могло быть возможным в отношении направления, в котором сгенерировано много движений объекта.
Когда объект является человеком, а томографическое изображение, которое будет получено, является томографическим изображением поперечного сечения, как проиллюстрировано на фиг. 31A, например, много движений генерируется в двух направлениях, как проиллюстрировано двусторонней стрелкой 3330 вдоль передних и задних сторон человека, вследствие дыхания или сердечного сокращения у человека.
Подробно, много движений сгенерировано в направлении 3330 и, в целях наблюдения движений в направлении 3330 наилучшим способом, поверхность, например, поверхность 3171, простирающаяся в направлении, перпендикулярном к направлению 3330, или в направлении, смежном с направлением, перпендикулярном к направлению 3330, ясно изображена. Другими словами, когда сгенерировано много движений направления 3330, поверхность 3171 ясно изображена на первом изображении и втором изображении, которые используются для получения первой информации. Поскольку первую информацию получают путем сравнения поверхности 3171, изображенной на первом изображении, и поверхности 3171, изображенной на втором изображении, то величина движения объекта в направлении 3330 может быть точно идентифицирована.
Соответственно, в целях измерения величины движения объекта в направлении 3330 первое угловое сечение и второе угловое сечение могут быть установлены как первое угловое сечение 3181 и второе угловое сечение 3182. Затем первая информация относительно движения объекта в первом направлении 3183 (таком же, как направление 3330), перпендикулярном к направлениям 3161 и 3162, в котором проецируется рентгеновское излучение, в первом угловом сечении 3181 и втором угловом сечении 3182, может быть получена. Когда коррекцию движения выполняют путем приложения величины движения относительно первого направления 3183, целевое изображение, соответствующее целевому времени Ttarget, может быть также реконструировано.
Кроме того, томографический аппарат 700 может выполнять следующие операции.
Получатель 710 данных реконструирует по меньшей мере одно контрольное изображение для оценки движения объекта посредством выполнения томографического сканирования при вращении в угловом сечении, меньшем чем один оборот объект, и получает первую информацию, указывающую величину движения объекта. «Угловое сечение менее чем один оборот» может идентично соответствовать описанному выше угловому сечению за один цикл. Кроме того, по меньшей мере одно контрольное изображение может представлять собой частичное угловое изображение, полученное в частичном угловом сечении, включенном в угловое сечение за один цикл. Подробно, контрольное изображение может являться по меньшей мере одним из первого изображения 1310 и второго изображения 1320, которые описаны на фиг. 13. Кроме того, контрольное изображение может являться по меньшей мере одним из первого изображения и третьего изображения, полученных в первом угловом сечении 2621 и третьем угловом сечении 2631, соответственно, и второго изображения и четвертого изображения, полученных во втором угловом сечении 2622 и четвертом угловом сечении 2632, соответственно, которые описаны в отношении фиг. 26.
Подробно, получатель 710 данных получает первое изображение, соответствующее первому времени, и получает второе изображение, соответствующее второму времени через способ PAR. Первая информация указывает зависимость между временем и величиной движения объекта на основании величины движения между первым изображением и вторым изображением.
Реконструктор 720 изображения выполняет описанную выше операцию коррекции движения для реконструкции целевого изображения, имеющего сокращенные артефакты движения, соответствующие целевому времени Ttarget в одном цикле, посредством использования первой информации, полученной получателем 710 данных.
Кроме того, томографический аппарат 700 может выполнять следующую операцию.
Получатель 710 данных получает первое изображение и второе изображение, соответствующие первому времени и второму времени, соответственно, и указывающие части поверхностей, формирующих объект, посредством выполнения томографического сканирования объекта. Получатель 710 данных получает первую информацию, указывающую движение объекта, посредством использования полученных первого изображения и второго изображения. Первая информация может указывать зависимость между временем и величиной движения поверхности, формирующей объект, соответствующую MVF между первым изображением и вторым изображением.
Реконструктор 720 изображения реконструирует целевое изображение посредством использования первой информации.
Кроме того, томографический аппарат 700 может выполнять следующую операцию.
Получатель 710 данных выполняет томографическое сканирование на движущемся объекте и получает первое частичное изображение и второе частичное изображение с использованием данных, полученных в начальном угловом сечении и конечном угловом сечении, противоположном начальному угловому сечению, соответственно. Получатель 710 данных получает первую информацию, указывающую зависимость между временем и величиной движения поверхности объекта, соответствующую MVF между первым частичным изображением и вторым частичным изображением.
Реконструктор 720 изображения реконструирует целевое изображение, указывающее объект в целевое время Ttarget, на основании первой информации.
Кроме того, томографический аппарат 700 может выполнять следующую операцию.
Получатель 710 данных выполняет томографическое сканирование объекта, получает первое изображение и второе изображение, соответствующие первому времени и второму времени, соответственно, и указывающие части поверхности, формирующей объект, и получает первую информацию, указывающую движение объекта, посредством использования первого изображения и второго изображения. Реконструктор 720 изображения реконструирует целевое изображение, указывающее объект путем деформирования по меньшей мере одного из исходных данных, необходимых для способа половинного реконструкции, и изображения, полученного посредством обратного проецирования с фильтрацией исходных данных, на основании первой информации.
Кроме того, томографический аппарат 700 может выполнять следующую операцию.
Получатель 710 данных получает первое изображение и второе изображение, которые являются частичными изображениями, с использованием данных, полученных в каждом из первого углового сечения, соответствующего первой точке наблюдения, и второго углового сечения, соответствующего второй точке наблюдения и находящегося напротив первого углового сечения, посредством выполнения томографического сканирования объекта. Получатель 710 данных может получать первую информацию, указывающую величину движения объекта, на основании первого изображения, второго изображения и дополнительной информации.
Реконструктор 720 изображения реконструирует целевое изображение, указывающее объект в целевое время, на основании первой информации.
Подробно, при выполнении томографического сканирования объекта, даже когда объект не движется сам по себе, объект может иметь движение вследствие внешних факторов. Например, когда колебания, перемещения или вибрации происходят в столе, на котором расположен объект, и/или в томографическом аппарате, который может генерировать движения в объекте, объект может колебаться, перемещаться или вибрировать. Генерация движения объекта вследствие внешних факторов может вызвать нечеткость при визуализации объекта.
Когда нечеткость происходит при визуализации объекта из-за внешних факторов, как описано выше, получатель 710 данных может получать первое изображение, второе изображение и первую информацию, и удалять нечеткость при визуализации объекта, возникшую вследствие внешних факторов.
Кроме того, томографический аппарат 700 может выполнять следующую операцию.
Получатель 710 данных получает первое изображение и второе изображение, которые являются частичными изображениями, с использованием данных, полученных в каждом из первого углового сечения, соответствующего первой точке наблюдения, и второго углового сечения, соответствующего второй точке наблюдения и находящегося напротив первого углового сечения, посредством выполнения томографического сканирования объекта. Получатель 710 данных может получать дополнительную информацию, которая является информацией о движении, сгенерированном в объекте в течение томографии. Получатель 710 данных может получать первую информацию, указывающую величину движения объекта, на основании первого изображения, второго изображения и дополнительной информации.
Реконструктор 720 изображения реконструирует целевое изображение, указывающее объект в целевое время, на основании первой информации.
Подробно, дополнительная информация может использоваться при выполнении томографического сканирования объекта в целях точного предсказания структуры движения объекта. Например, когда объект является сердцем, и сердце внезапно бьется быстро или бьется по неожиданной схеме, получают дополнительную информацию, которая является информацией о движении тепла, и первая информация может быть установлена путем отражения дополнительной информации.
Кроме того, когда объект не движется, и движение, такое как колебания, перемещения или вибрации томографического аппарата, вызывающие движение в столе, на котором расположен объект или в объекте, генерируются, движение может быть сгенерировано в объекте вследствие внешних факторов объекта. В этом случае может быть получена дополнительная информация, которая является информацией о движении, сгенерированном в объекте в течение томографии вследствие внешних факторов, и может быть установлена первая информация путем отражения дополнительной информации.
Например, может быть получена дополнительная информация путем контроля движения объекта, подвергающегося томографическому сканированию, посредством применения контролирующего устройства, которое контролирует движение объекта, такого как цифровой стетоскоп. Форма графика может быть установлена в первой информации путем отражения структуры движения объекта, сгенерированного в угловом сечении за один цикл, и получена цифровым стетоскопом. Например, когда схема движения объекта имеет линейную схему в угловом сечении за один цикл согласно дополнительной информации, получатель 710 данных может устанавливать первую информацию в такой форме, как проиллюстрировано в первом пункте 2971 на фиг. 29. В другом примере, когда объект движется быстро в начальном сечении углового сечения за один цикл и затем едва движется после начального сечения углового сечения за один цикл, согласно дополнительной информации, первая информация может быть установлена в такой форме, как проиллюстрировано в пункте 2972 на фиг. 29.
Кроме того, томографический аппарат 700 может также содержать монитор (не показан) для получения дополнительной информации. В этом случае получатель 710 данных может принимать дополнительную информацию от монитора и получать первую информацию на основании полученной дополнительной информации. Монитор может включать в себя различные типы устройств для контроля движения объекта, например, цифровой стетоскоп, датчик обнаружения движения и светочувствительную матрицу для обнаружения движения.
Кроме того, томографический аппарат 700 может не содержать монитор для получения дополнительной информации и может использовать только дополнительную информацию, полученную от монитора (не показан), который подключен по внешнему соединению.
Как описано выше, величину движения, сгенерированного в угловом сечении за один цикл, измеряют на основании первых и вторых изображений, а структура движения объекта в угловом сечении за один цикл может быть установлена на основании дополнительной информации, в результате чего получают первую информацию, более точно указывающую движение объекта.
Фиг. 32 представляет собой блок-схему для объяснения способа 3200 реконструкции томографического изображения согласно одному из вариантов осуществления настоящего изобретения. Операции этапов, включенных в способ 3200 реконструкции томографического изображения согласно настоящему варианту осуществления, совпадают с операциями элементов, включенных в томографические аппараты 600 и 700 согласно вариантам осуществлениям настоящего изобретения, описанным в отношении фиг. 1-31. Соответственно, в описании способа 3200 реконструкции томографического изображения, избыточные описания с фиг. 1-31 опущены.
Обратимся к фиг. 32; способ 3200 реконструкции томографического изображения согласно одному из вариантов осуществления настоящего изобретения выполняет томографическое сканирование объекта (операция 3210). Подробно, посредством томографического сканирования первое изображение, которое является частичным изображением, получают с использованием данных, полученных в первом угловом сечении, соответствующем первому времени, а второе изображение, которое является частичным изображением, получают с использованием данных, полученных во втором угловом сечении, соответствующем второму времени (операция 3210). Операция 3210 может быть выполнена получателем 710 данных томографического аппарата 700. Каждое из первого углового сечения и второго углового сечения может иметь значение менее 180°.
Первую информацию, указывающую величину движения в момент времени на основании величины движения между первым изображением и вторым изображением, получают в операции 3210 (операция 3220). Подробно, первая информация может быть получена путем сравнения только первого изображения и второго изображения. Операция 3220 может быть выполнена получателем 710 данных томографического аппарата 700. Первой информацией может быть величина движения объекта в этот момент времени. Кроме того, когда сканируется движущийся объект, объект, изображенный на первом изображении, и объект, изображенный на втором изображении, отличаются друг от друга по меньшей мере в одном из размера, положения и формы.
Подробно, первая информация может указывать величину движения поверхности, формирующей объект. Кроме того, первая информация может указывать зависимость между временем и величиной движения поверхности, формирующей объект, соответствующей MVF между первым изображением и вторым изображением.
Кроме того, при получении первой информации отображается экран пользовательского интерфейса для установки первой информации, а вторая информация, соответствующая зависимости между временем и величиной движения объекта в первой информации, может быть принята через отображенный экран пользовательского интерфейса. Первая информация может быть сгенерирована на основании второй информации.
Кроме того, когда томографическое сканирование выполняется в то время, как генератор 106 рентгеновского излучения вращается вокруг объекта и проецирует рентгеновское излучение в направлении объекта, операция 3210 получения первого изображения и второго изображения может включать в себя операции получения первого частичного изображения и третьего частичного изображения, соответственно, из первого углового сечения 2621 и третьего углового сечения 2631, которые включены в первое «a» угловое сечение 2611 из углового сечения, имеющего угол 180+a, который является угловым сечением за один цикл, и второго частичного изображения и четвертого частичного изображения, соответственно, из второго углового сечения 2622 и четвертого углового сечения 2632, которые включены в последнее «a» угловое сечение 2612 углового сечения за один цикл, как проиллюстрировано на фиг. 26. Первая информация, указывающая зависимость между временем и величиной движения объекта, может быть получена на основании величины движения между первым частичным изображением и вторым частичным изображением и величины движения между третьим частичным изображением и четвертым частичным изображением. Первое угловое сечение и второе угловое сечение имеют отношение парного угла друг с другом, и третье угловое сечение и четвертое угловое сечение имеют отношение парного угла друг с другом.
Кроме того, способ 3200 реконструкции томографического изображения может также включать в себя, до операции 3210, операции отображения медицинского изображения и выбора ROI по медицинскому изображению (не показаны). Операция 3210 может включать в себя операции извлечения линии поверхности, включенной в ROI, получения угла обзора, соответствующего извлеченной линии поверхности, установки первого углового сечения и второго углового сечения согласно углу обзора и получения первого изображения и второго изображения, соответственно, из первого углового сечения и второго углового сечения.
Кроме того, способ 3200 реконструкции томографического изображения может также включать в себя операцию отображения экрана пользовательского интерфейса, содержащего меню для установки целевого времени (не показана).
Целевое изображение, соответствующее целевому времени между первым временем и вторым временем, реконструируют на основании первой информации, полученной в операции 3220 (операция 3230). Операция 3230 может быть выполнена посредством реконструкции 720 изображений томографического аппарата 700. Подробно, целевое изображение может быть получено посредством коррекции движения на основании величины движения объекта в целевое время, на основании первой информации.
Кроме того, на реконструированном целевом изображении степень коррекции движения объекта, включенного в целевое изображение, может изменяться в соответствии с целевым временем.
Кроме того, на целевом изображении, когда целевое время соответствует среднему углу между первым угловым сечением и вторым угловым сечением, коррекция движения объекта может быть улучшена по сравнению с коррекцией движения объекта, когда целевое время не соответствует среднему углу.
Фиг. 33 представляет собой блок-схему для объяснения способа 3300 реконструкции томографического изображения согласно другому варианту осуществления настоящего изобретения. Операции этапов, включенных в способ реконструкции томографического изображения 3300 согласно настоящему варианту осуществления, совпадают с операциями элементов, включенных в каждый из томографических аппаратов 600 и 700 согласно вариантам осуществлениям настоящего изобретения, описанным в отношении фиг. 1-31. Соответственно, в описании способа 3300 реконструкции томографического изображения, избыточные описания с фиг. 1-31 опущены.
Обратимся к фиг. 33; в способе 3300 реконструкции томографического изображения согласно настоящему варианту осуществления томографическое сканирование выполняется на движущемся объекте (операция 3310). Подробно, получают первое изображение и второе изображение, которые являются частичными изображениями, соответствующими первому времени и второму времени, соответственно, и указывающими одни и те же части поверхностей, формирующих объект. Подробно, первое изображение и второе изображение получают с использованием данных, полученных в каждом их первого частичного углового сечения, соответствующего первому времени, и второго углового сечения, соответствующего второму времени и находящегося напротив первого углового сечения, посредством выполнения томографического сканирования при вращении в угловом сечении менее чем на один оборот вокруг объекта. Операция 3310 может быть выполнена получателем 710 данных томографического аппарата 700.
Первую информацию, указывающую движение объекта, получают посредством использования первого изображения и второго изображения, полученных в операции 3310 (операция 3320). Операция 3320 может быть выполнена получателем 710 данных томографического аппарата 700. Первая информация может указывать зависимость между временем и величиной движения поверхности, формирующей объект, соответствующей MVF между первым изображением и вторым изображением.
Соответствующее целевое изображение реконструируют на основании первой информации, полученной в операции 3320 (операция 3330). Подробно, целевое изображение может быть реконструировано путем выполнения коррекции движения, описанной в отношении фиг. 19А-24. Операция 3330 может быть выполнена реконструктором изображения 720 томографического аппарата 700.
Фиг. 34A представляет собой реконструированное целевое изображение, сгенерированное обычной КТ-системой. Обратимся к фиг. 34A; реконструированное целевое изображение 3410 реконструировано обычной КТ-системой (не показана), содержащей детектор рентгеновского излучения, имеющий 128 детекторов, при условии, что время вращения составляет 300 мс, а частота сердечных сокращений составляет 70 уд/мин.
Обратимся к фиг. 34A; как показано в области 3420, нечеткость вследствие движения возникает на реконструированном целевом изображении 3410. Соответственно, коронарная артерия сердца на реконструированном целевом изображении 3410 не изображена ясно.
Фиг. 34B представляет собой реконструированное целевое изображение, полученное томографическим аппаратом согласно примерным вариантам осуществлениям настоящего изобретения.
Обратимся к фиг. 34B; реконструированное целевое изображение 3450 реконструировано при условии, что детектор рентгеновского излучения имеет 128 детекторов, время вращения составляет 300 мс, а частота сердечных сокращений составляет 70 уд/мин. Обратимся к фиг. 34B; как показано в области 3460, коррекция движения эффективно выполняется в примерных вариантах осуществлениях настоящего изобретения, и поэтому коронарная артерия сердца на реконструированном целевом изображении 410 изображена ясно.
Как описано выше, в томографическом аппарате согласно настоящему изобретению и способу реконструкции его томографического изображения изображение с сокращенными артефактами движения может быть реконструировано посредством использования исходных данных, полученных при вращении на угловое сечение за один оборот, то есть угловое сечение, соответствующее углу 180+дополнительный угол. Соответственно, по сравнению с объемом данных, необходимым для коррекции движения согласно уровню техники, объем данных для реконструкции скорректированного по движению изображения может быть уменьшен до объема данных, соответствующего угловому сечению, имеющему угол 180+угол веерного пучка, и время для получения и накопления данных может быть уменьшено. Соответственно, объем рентгеновского излучения, которым облучается пациент, может быть уменьшен.
Кроме того, в томографическом аппарате согласно настоящему изобретению и способу реконструкции его томографического изображения в соответствии с описанным выше, целевое изображение реконструируют посредством получения информации о движении объекта через первые и вторые изображения, имеющие высокое временное разрешение, в результате чего состояние движения объекта может быть точно отражено, и может быть реконструировано целевое изображение, имеющее высокое временное разрешение. Кроме того, поскольку коррекция движения эффективно выполняется на поверхности, которая изображена с использованием данных проецирования, полученных в начальном угловом сечении и конечном угловом сечении в угловом сечении за один цикл, где нечеткость сгенерирована наиболее сильно, может быть реконструировано целевое изображение, имеющее высокое временное разрешение. Соответственно, изображение с сокращенными артефактами движения может быть реконструировано.
Кроме того, другие варианты осуществления настоящего изобретения могут также быть реализованы через машиночитаемый код/инструкции в/на носителе информации, например, машиночитаемом носителе информации, для управления по меньшей мере одним элементом обработки для осуществления любого описанного выше варианта осуществления. Носитель информации может соответствовать любому носителю/носителям, допускающим хранение и/или передачу машиночитаемого кода.
Машиночитаемый код может быть записан/перенесен на носитель информации множеством способов, при этом примеры носителей информации включают в себя такие носители записи, как магнитные запоминающие устройства (например, ROM, дискеты, жесткие диски, и т.д.) и оптические носители информации (например, CDROM или DVD), и средства передачи данных, такие как средство передачи данных Интернет.
Следует понимать, что примерные варианты осуществления, описанные в настоящем раскрытии, следует рассматривать только в описательном смысле, а не в целях ограничения. Описания характеристик или аспектов в каждом варианте осуществления следует, как правило, рассматривать как доступные для других аналогичных характеристик или аспектов в других вариантах осуществления.
В то время как один или более вариантов осуществления настоящего изобретения были описаны в отношении фигур, специалистам в данной области техники будет понятно, что различные изменения в форме и деталях могут быть внесены без отклонения от формы и объема настоящего изобретения, как определено в приведенной ниже формуле изобретения.
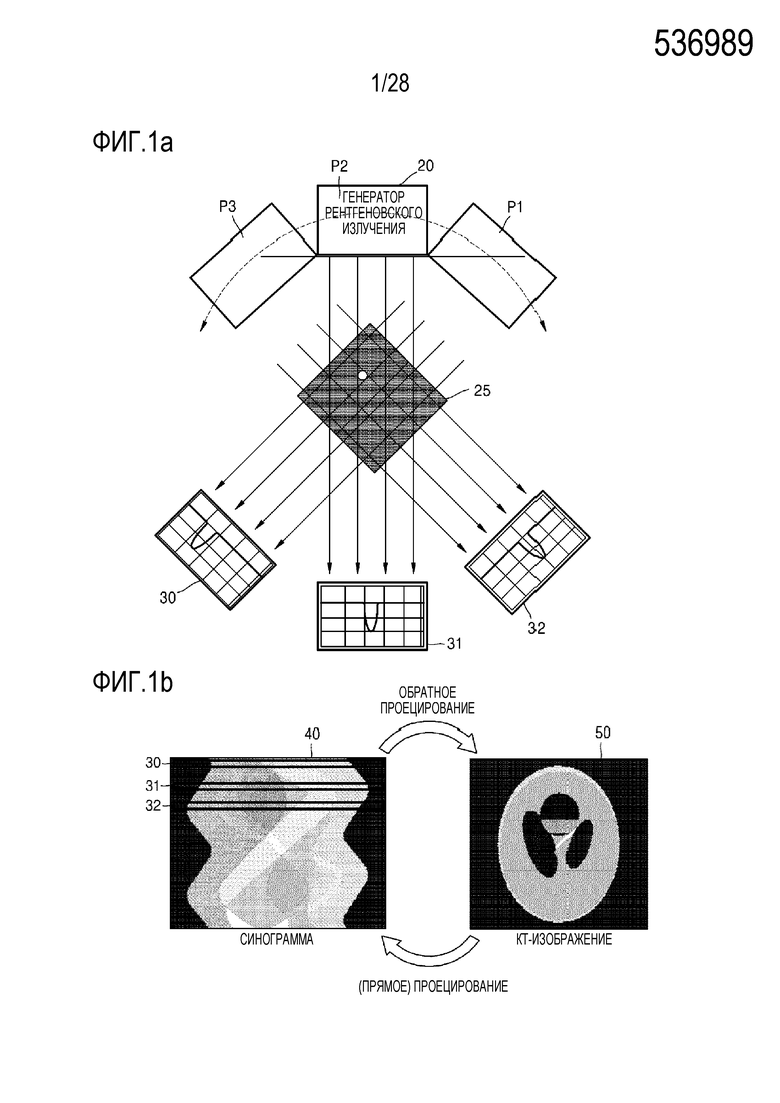
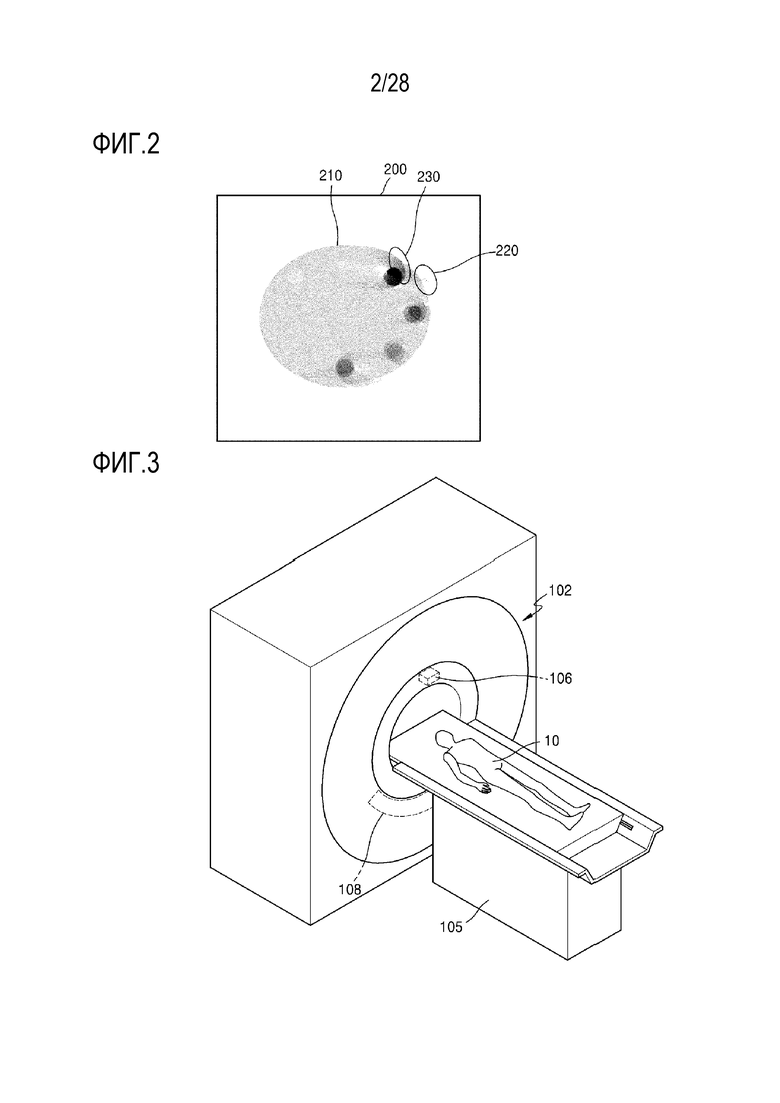
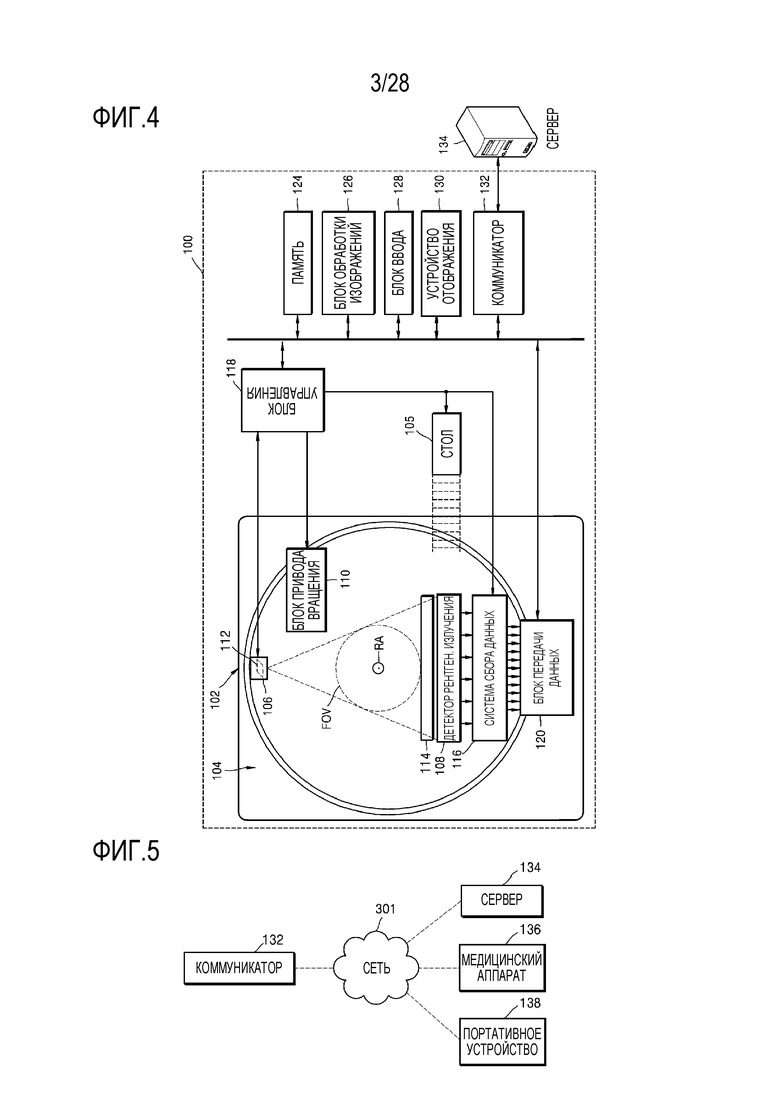
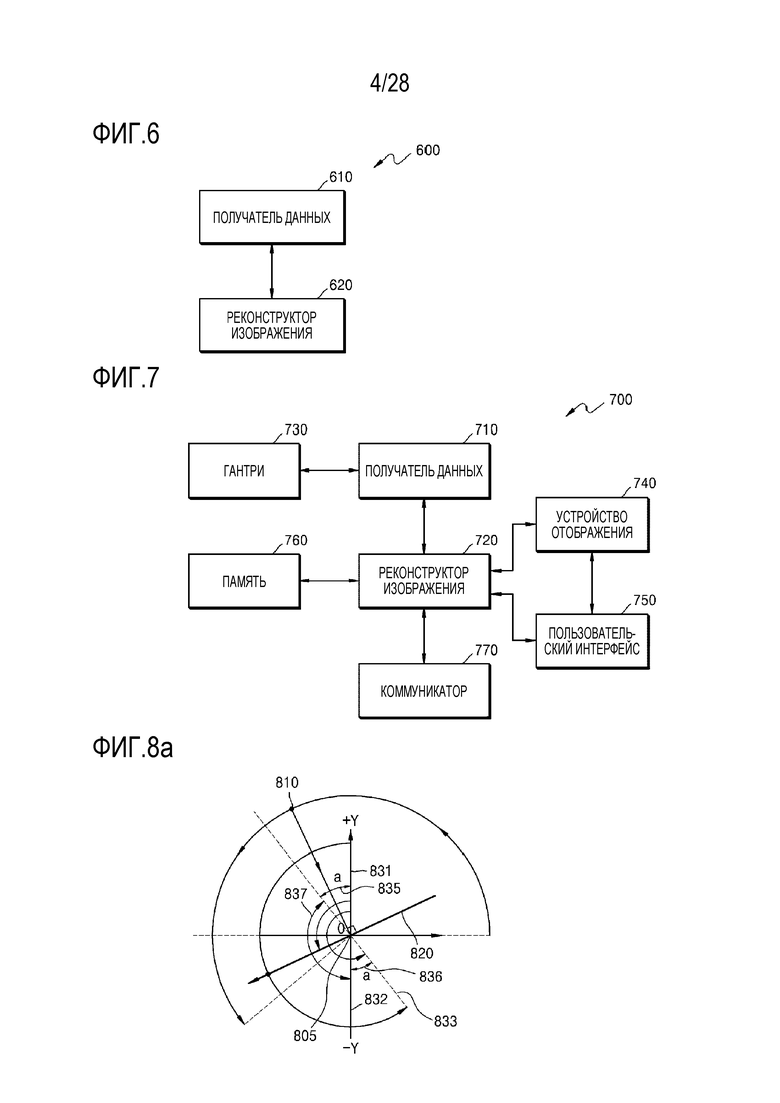
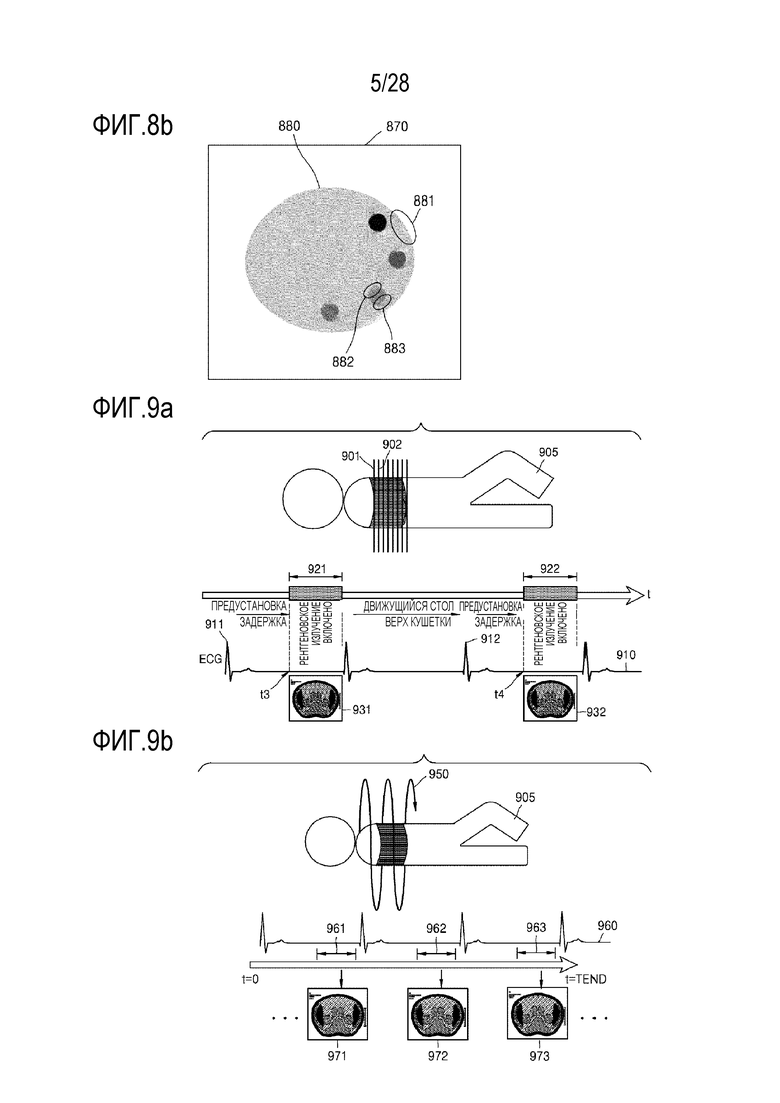
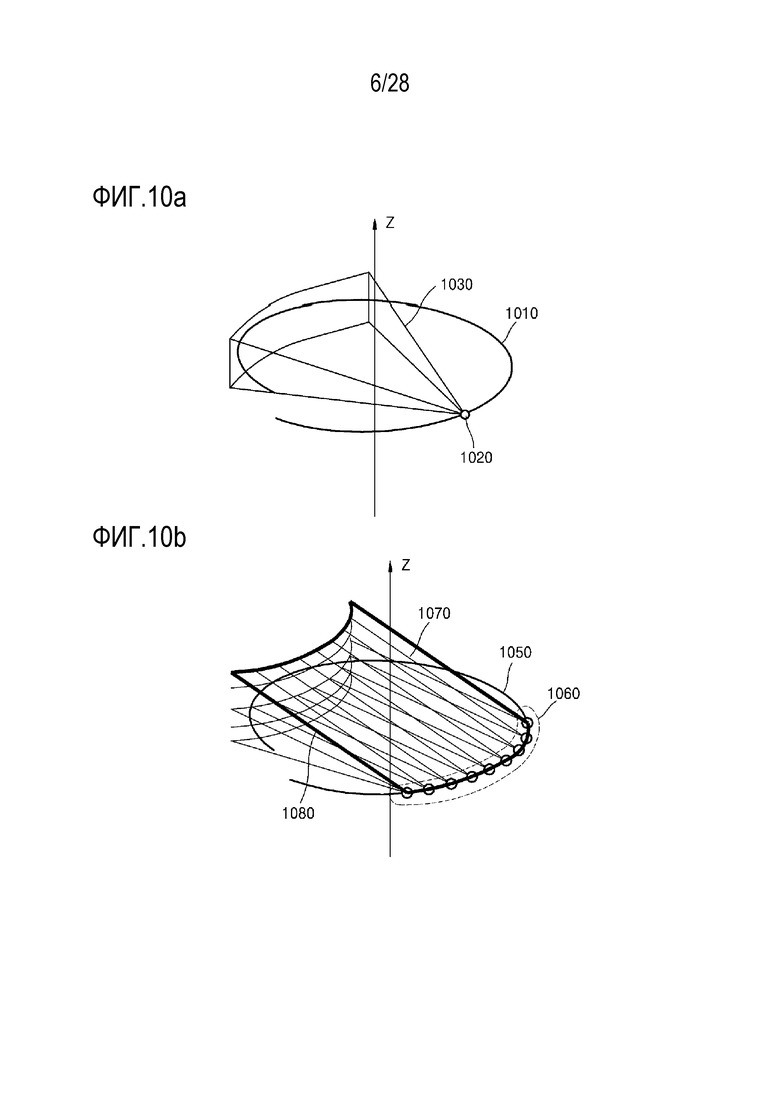
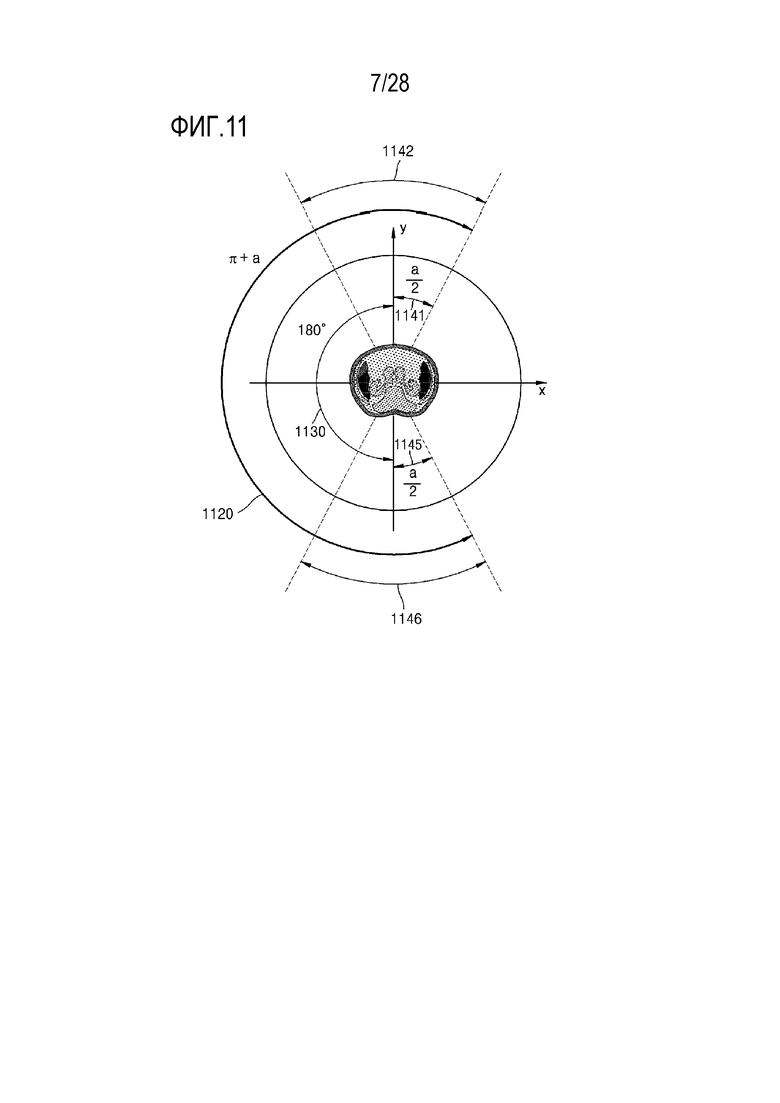
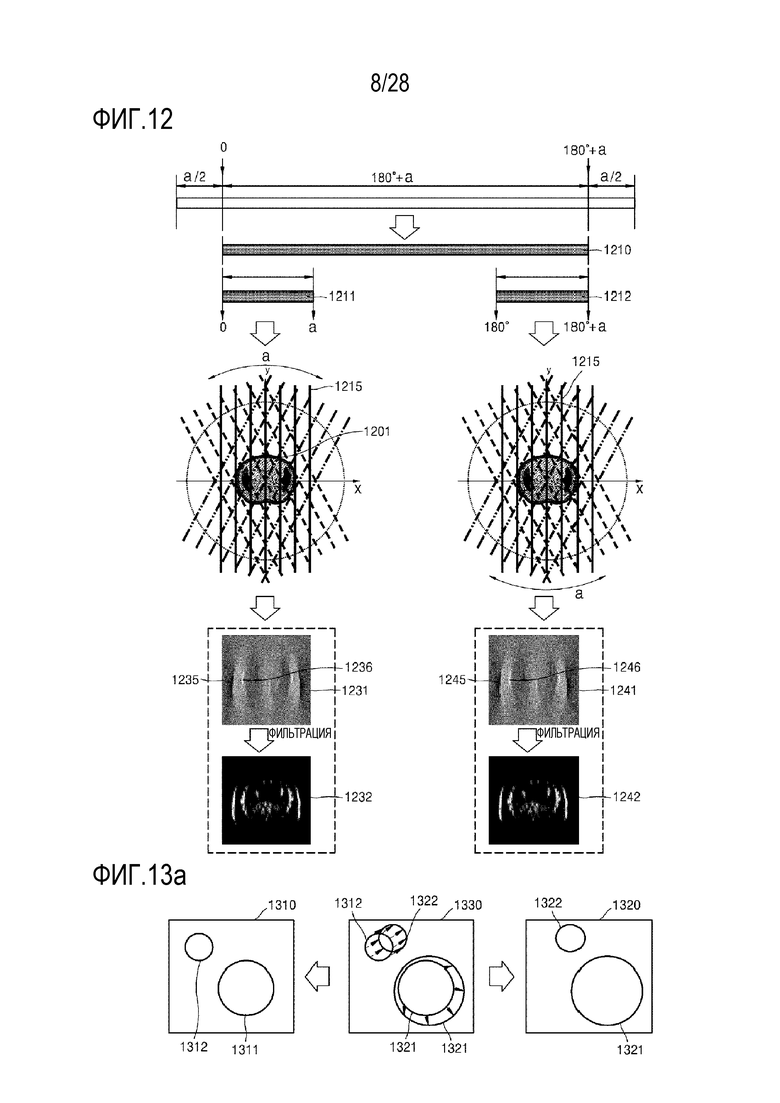
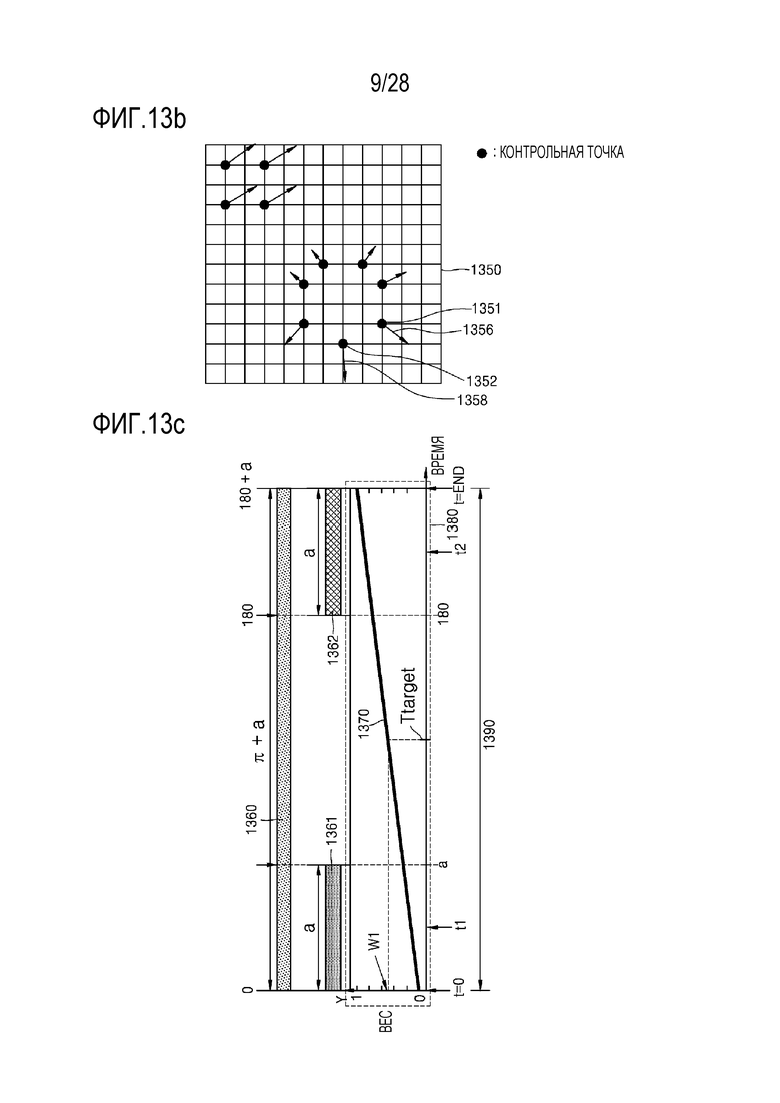
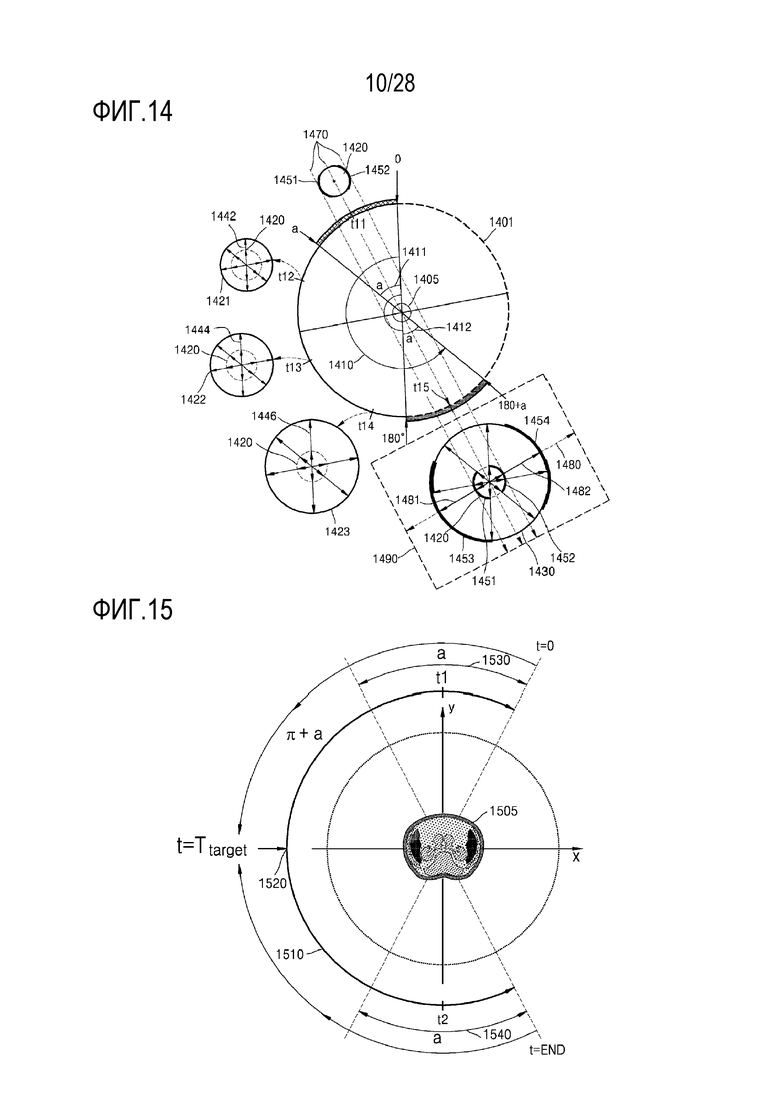
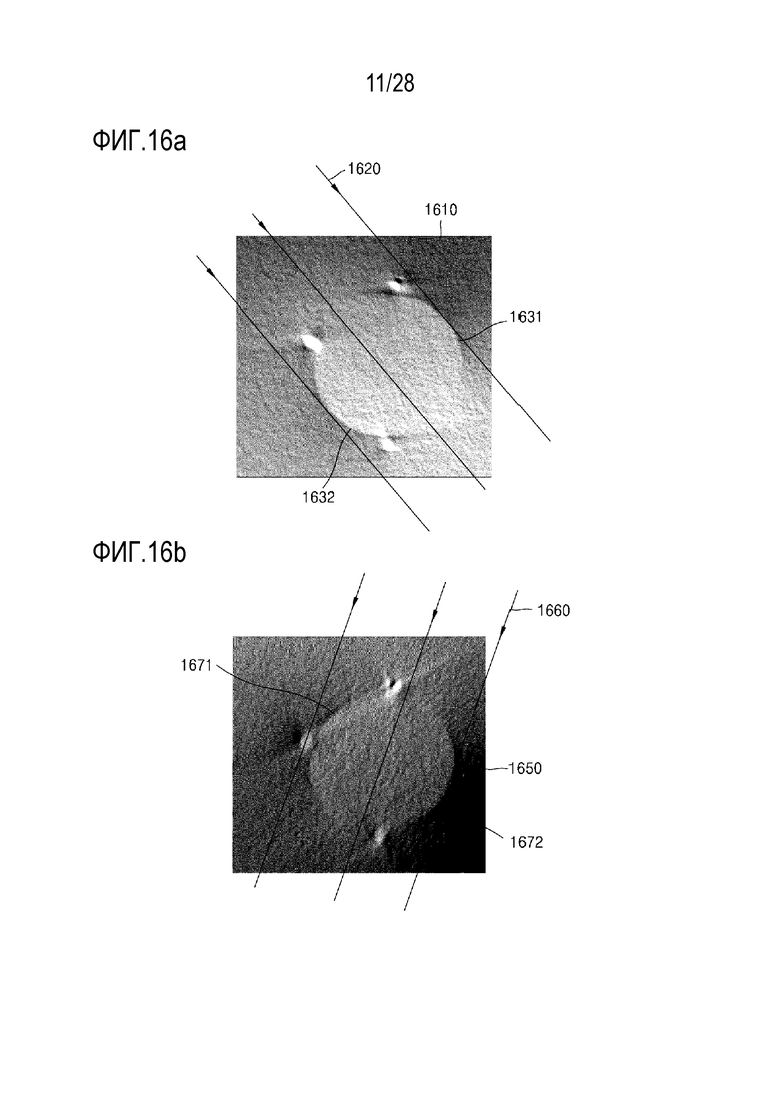
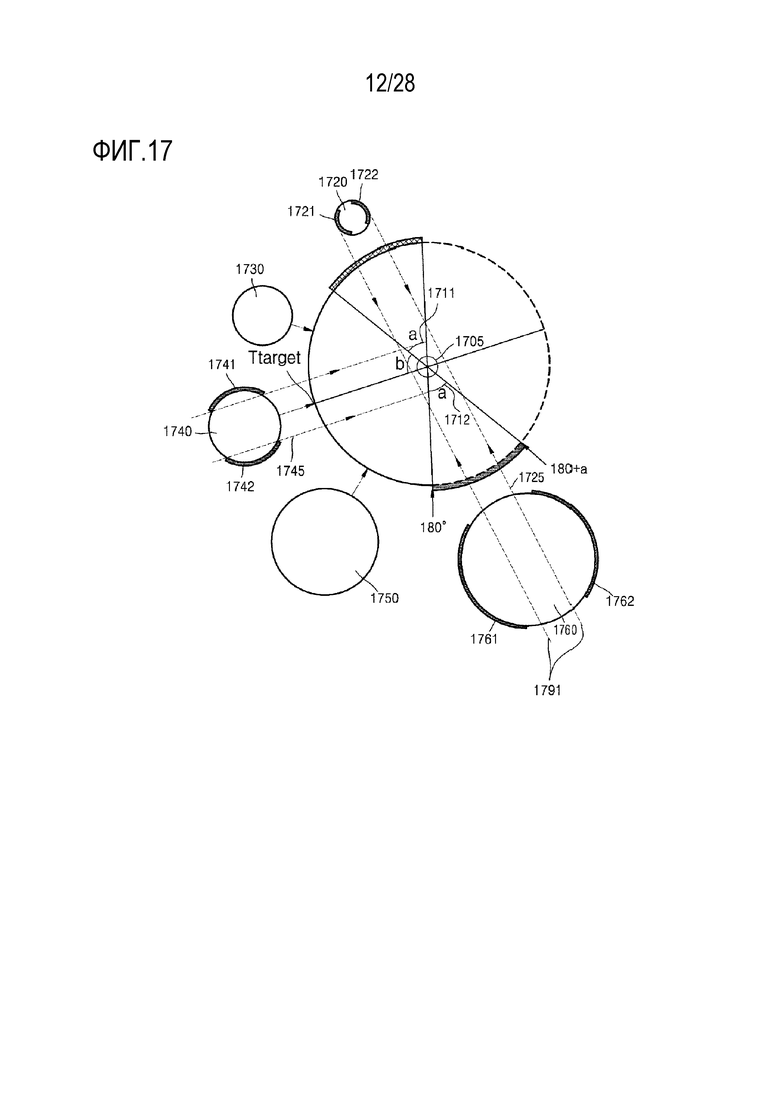
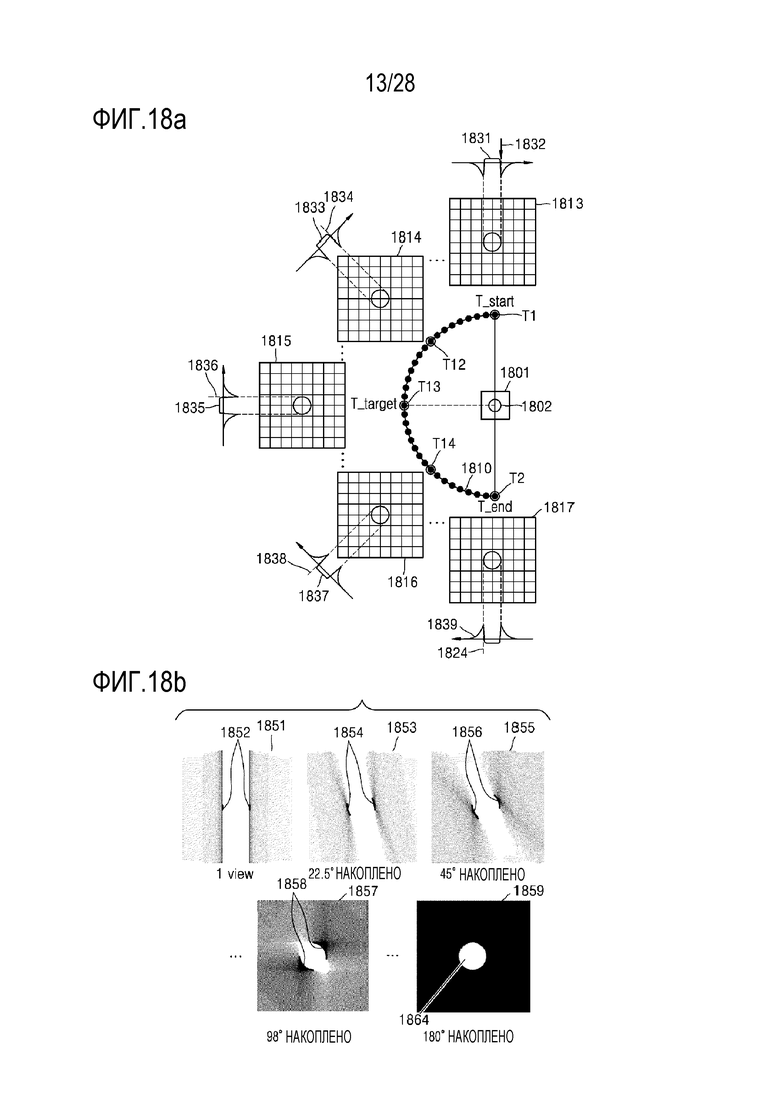
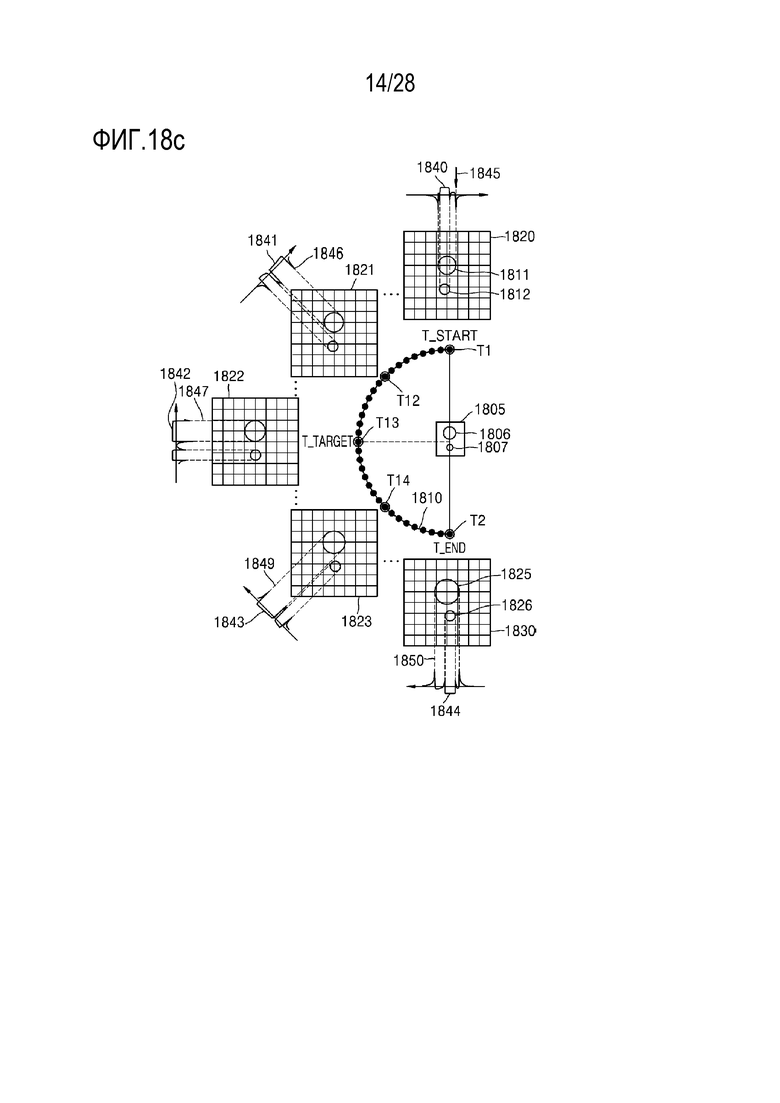
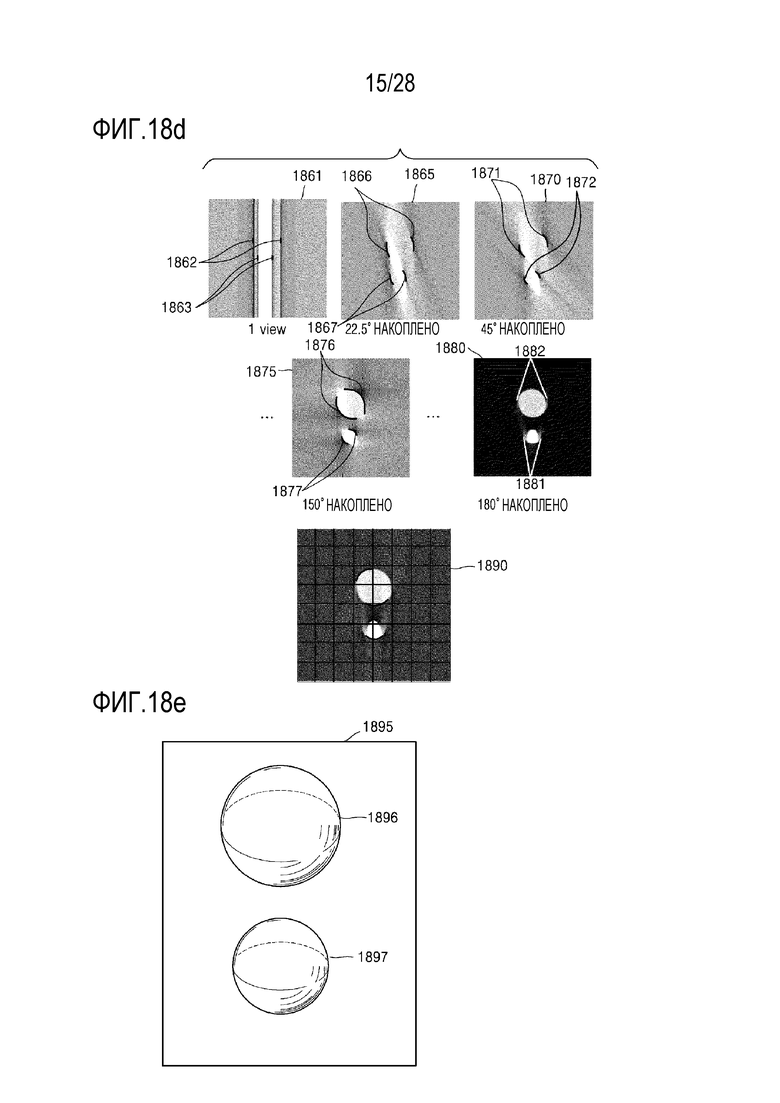
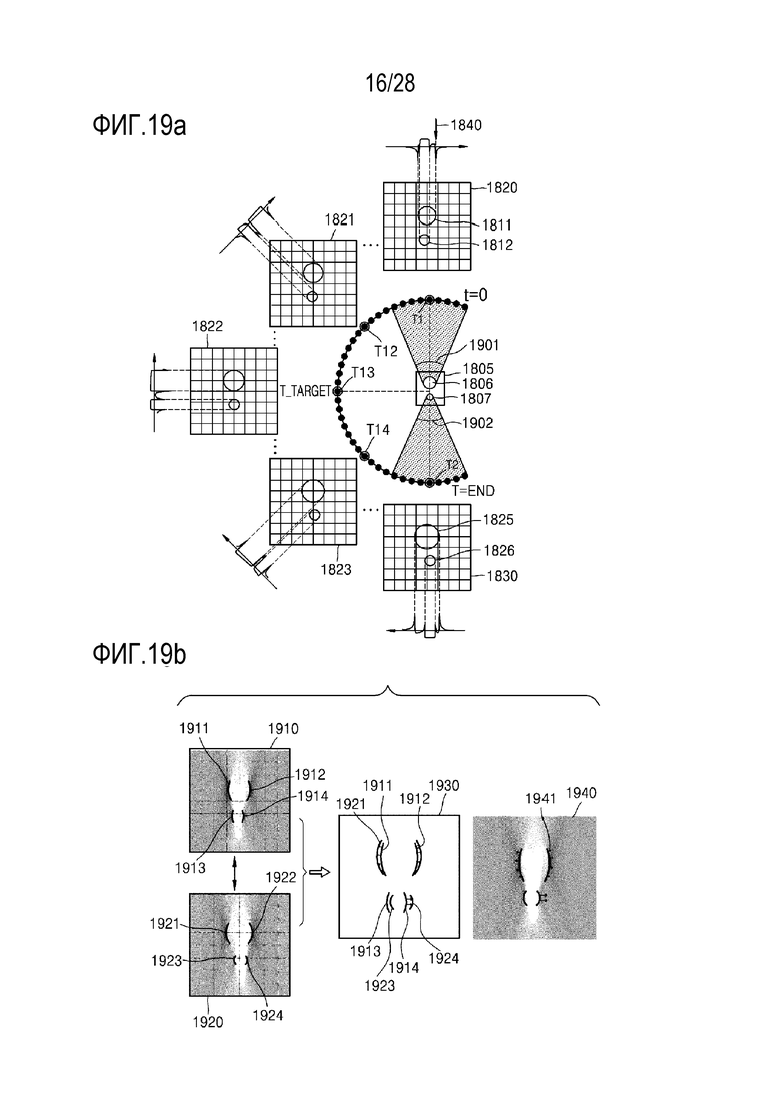
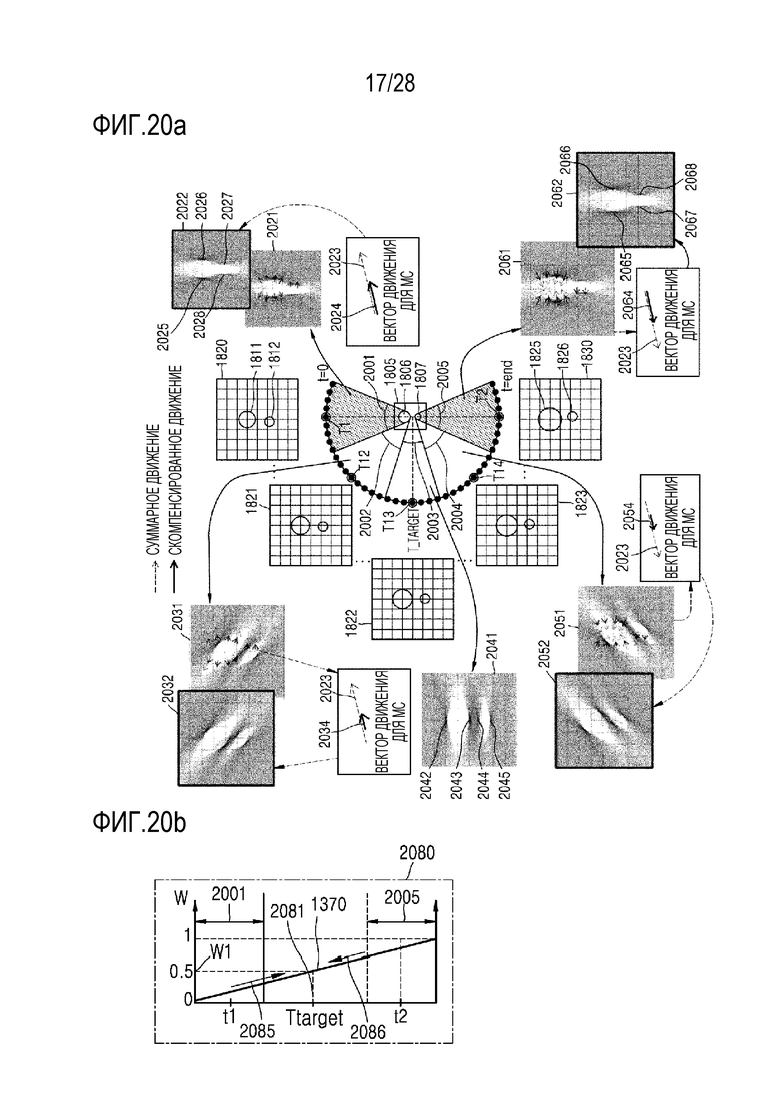
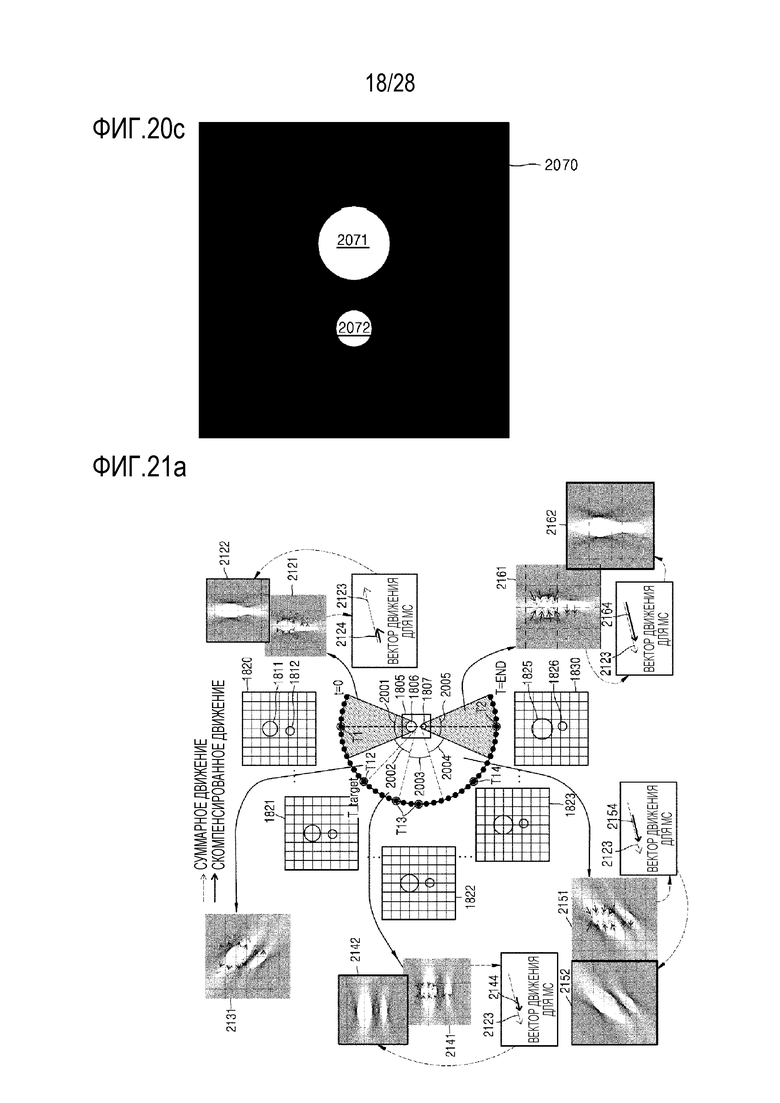
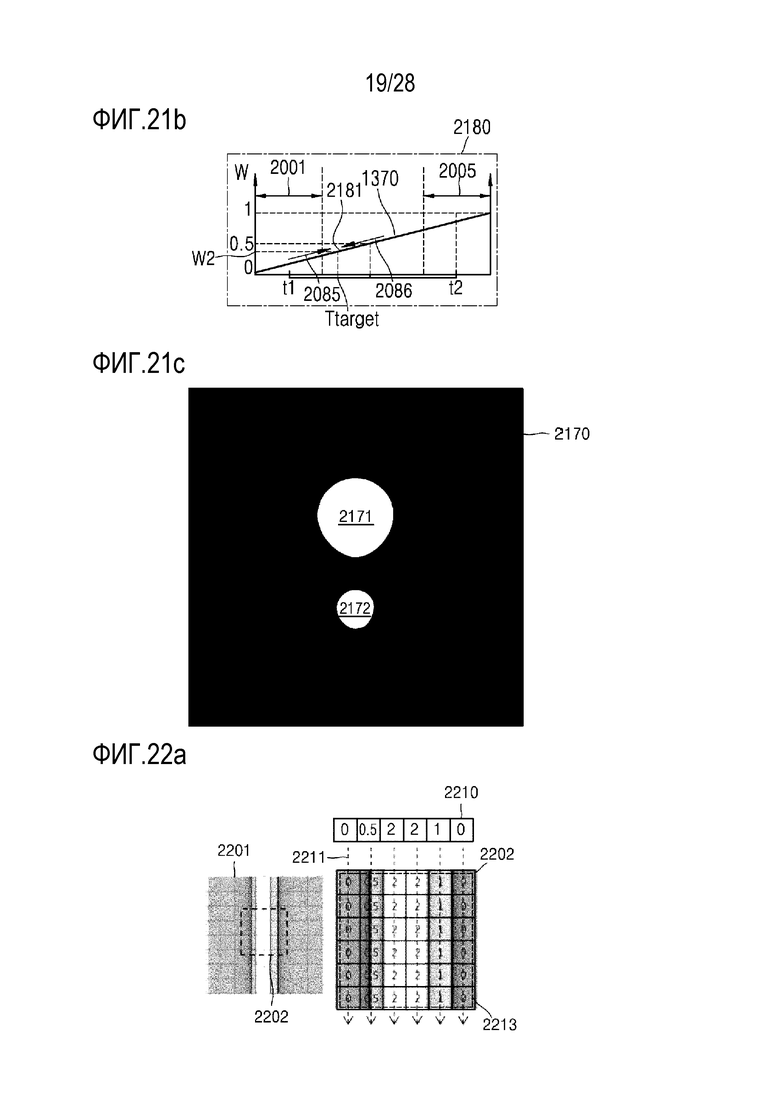
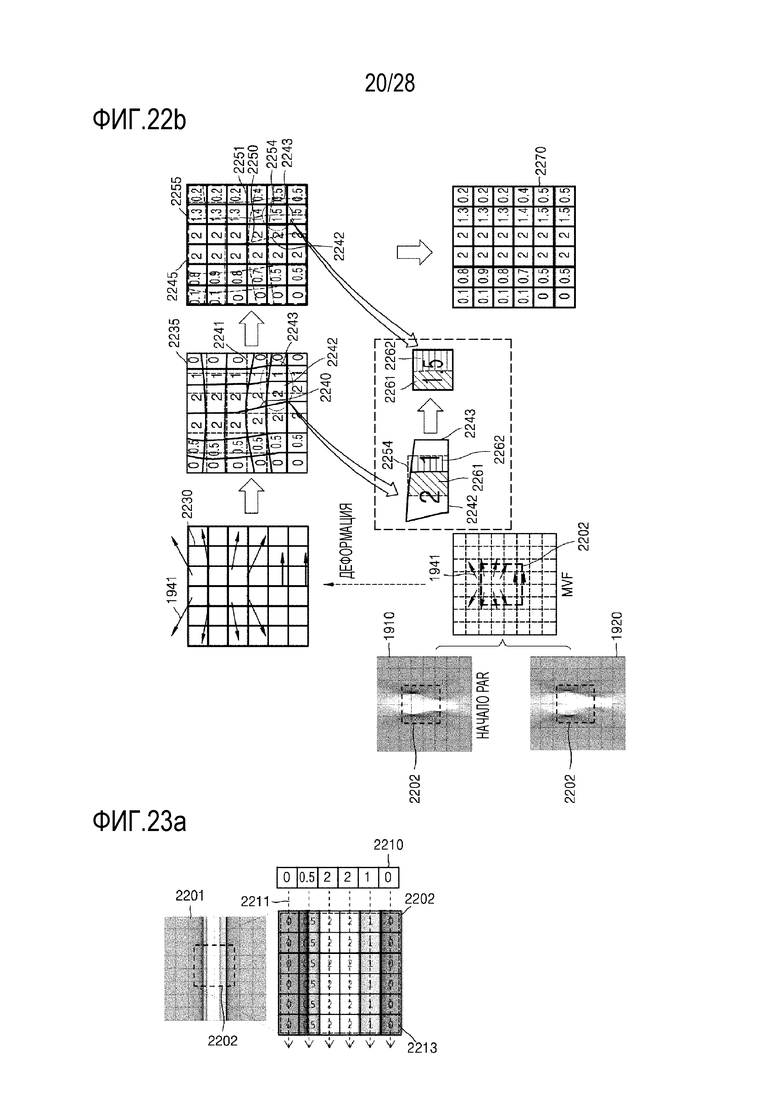
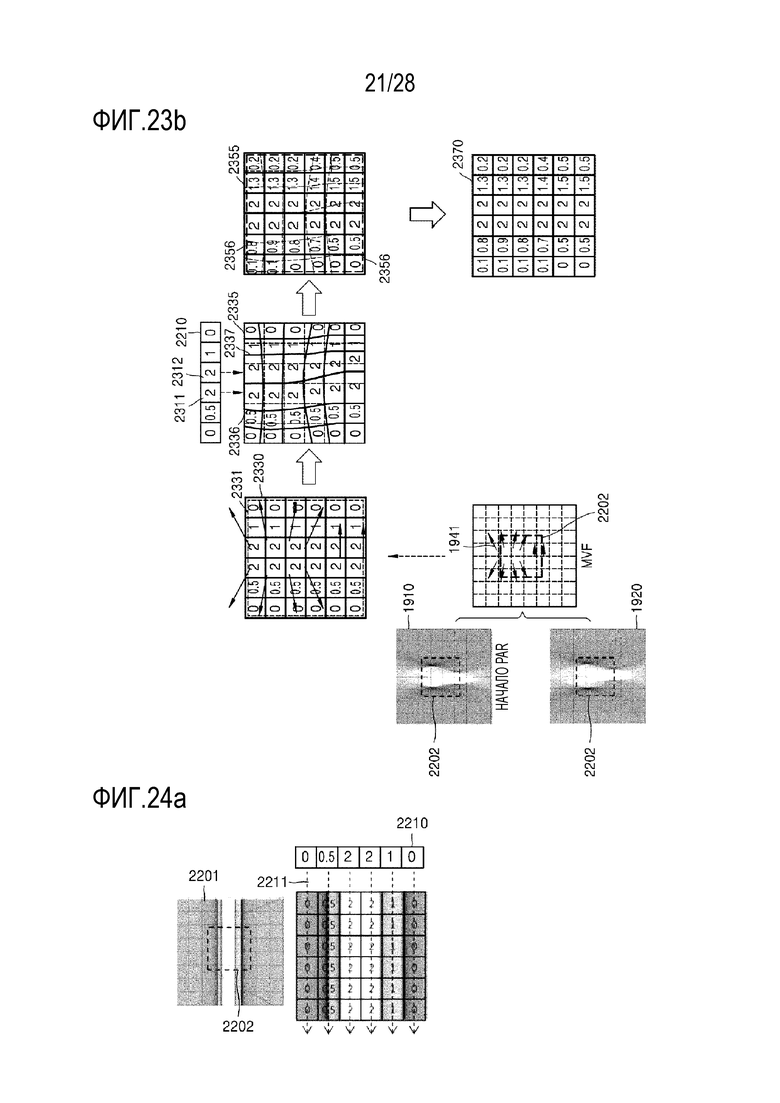
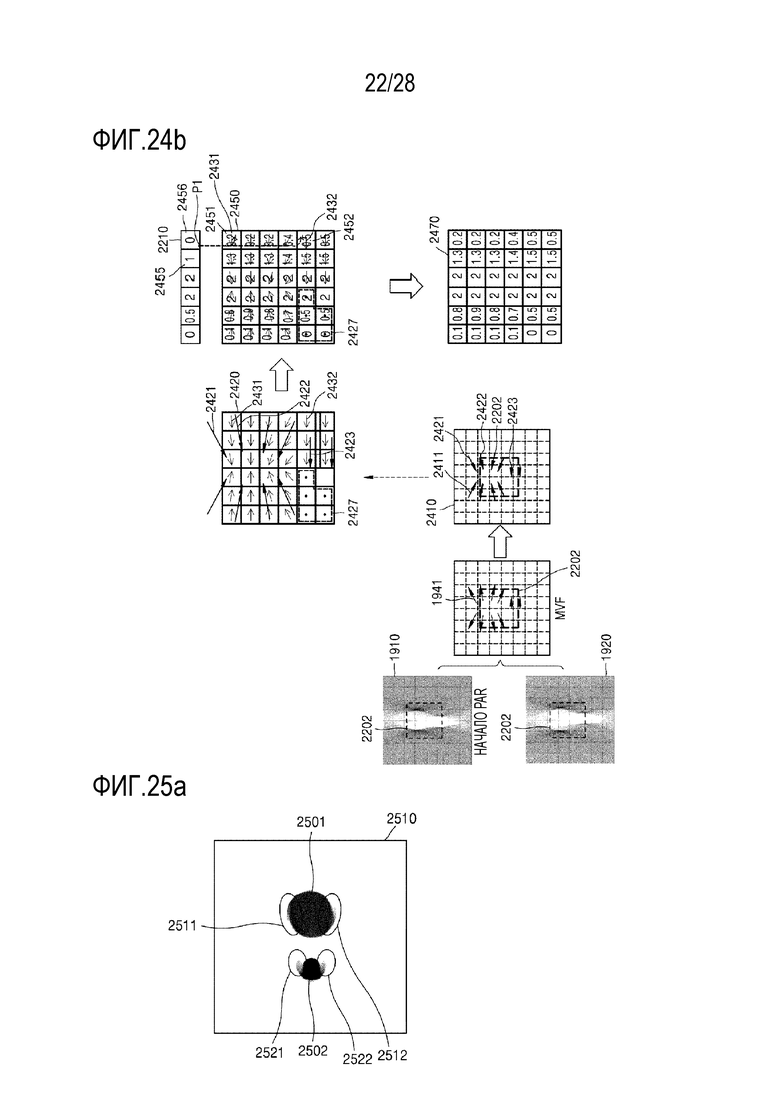
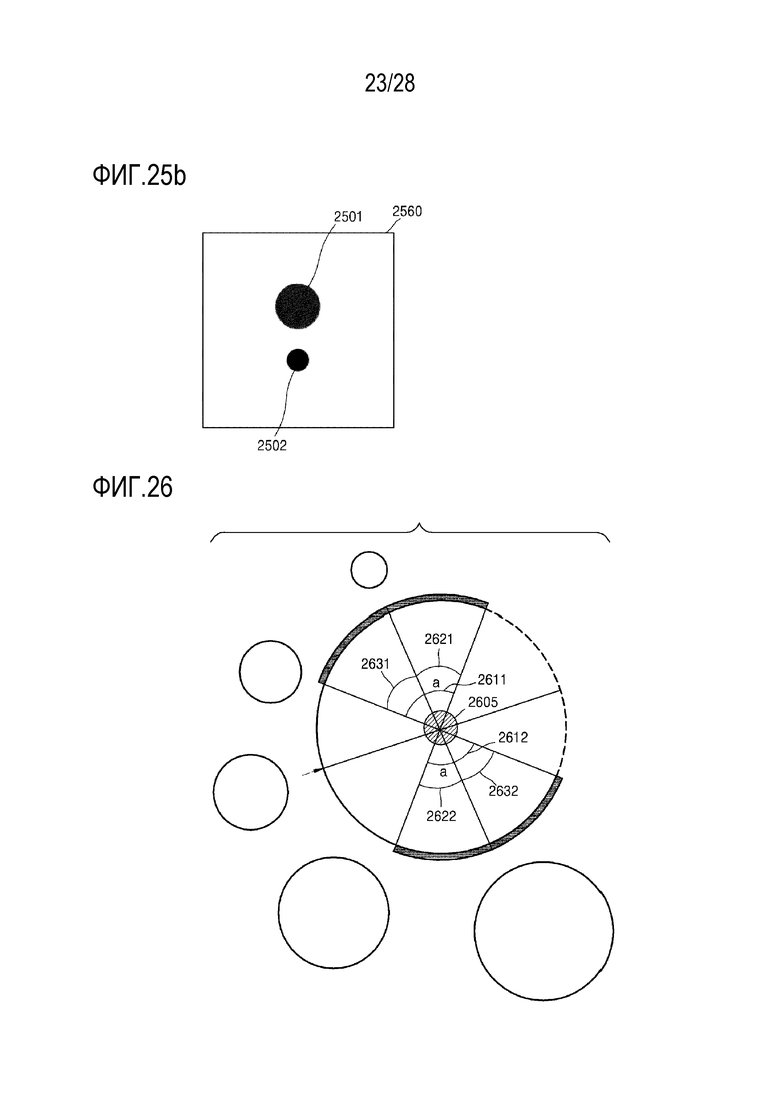
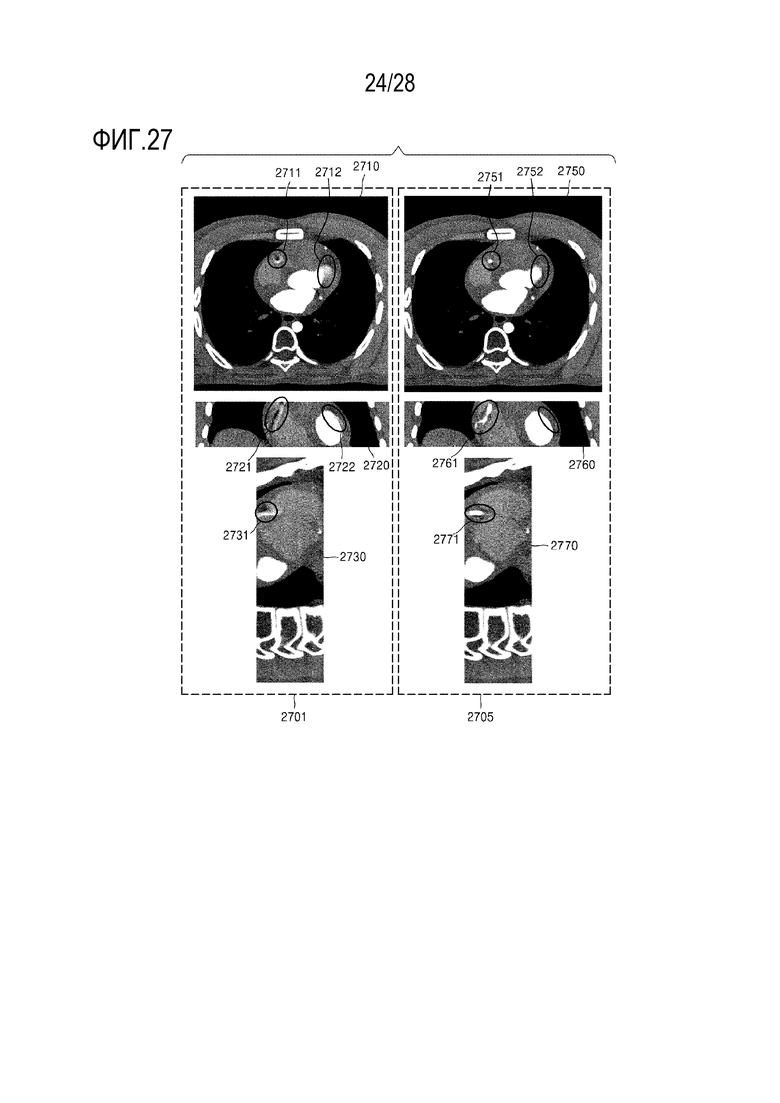
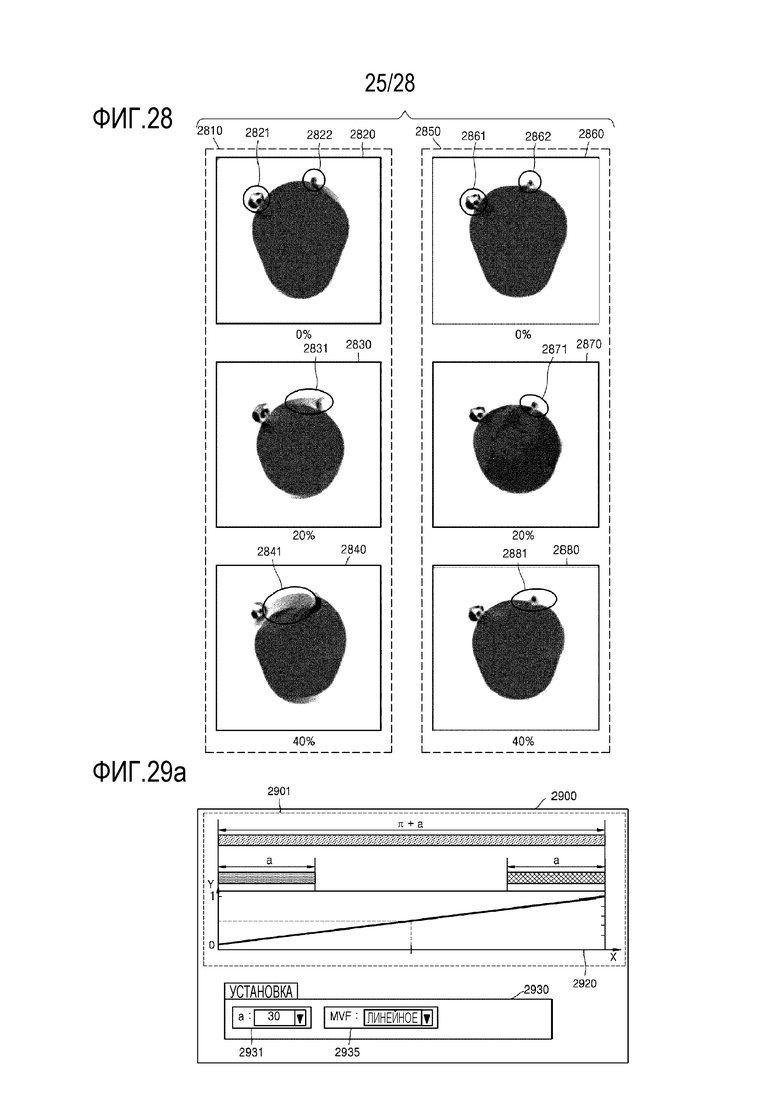
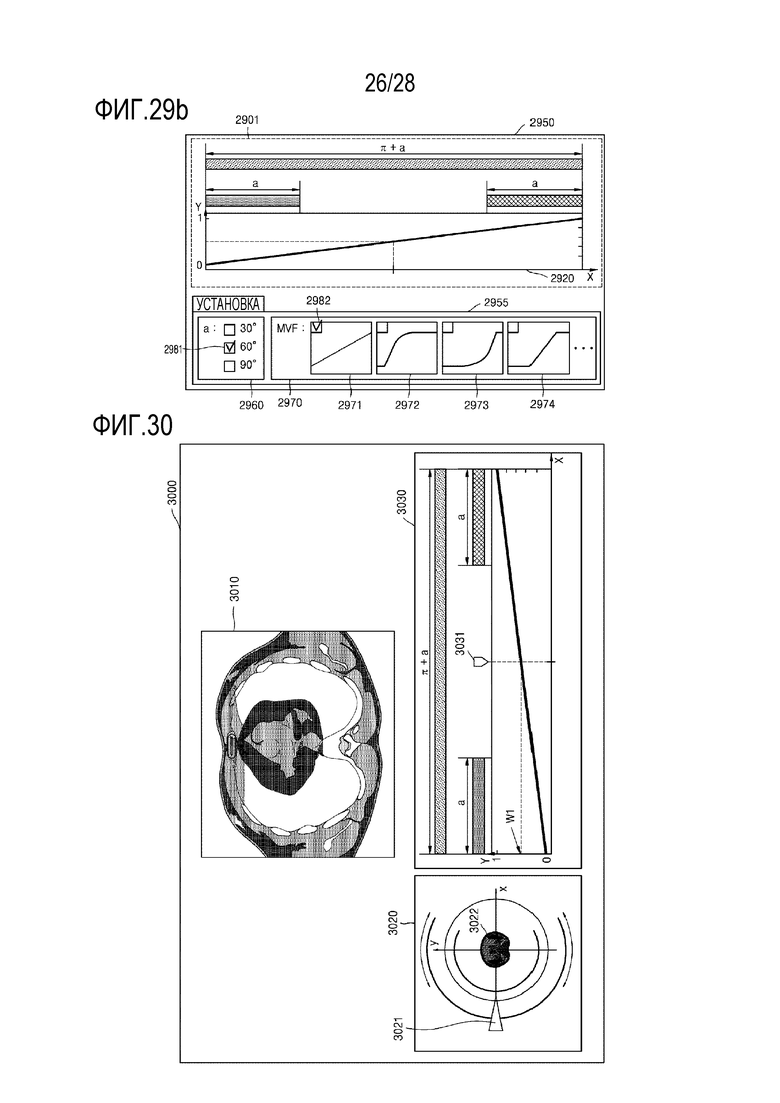
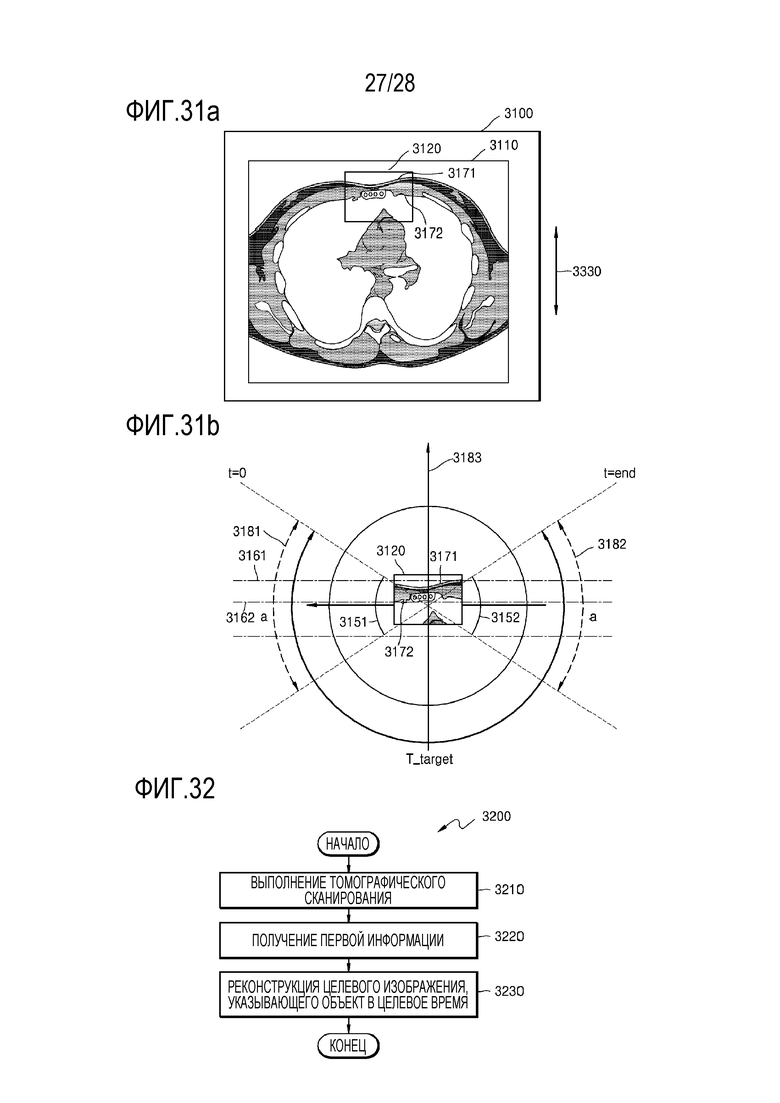

Группа изобретений относится к медицинской технике, а именно к средствам томографических систем визуализации. Томографический аппарат содержит один или более процессоров, которые получают частичные изображения объекта, которые используются для получения первой информации, указывающей величину движения объекта, и включают в себя первое изображение, полученное в первое время посредством использования данных, полученных в первом угловом сечении, угол которого менее 180° и в которое включено первое время, и второе изображение, полученное во второе время посредством использования данных, полученных во втором угловом сечении, находящемся напротив первого углового сечения, угол которого менее 180° и в которое включено второе время, причем второе угловое сечение не перекрывается с первым угловым сечением. Также получают первую информацию, указывающую величину движения объекта, посредством использования первого изображения и второго изображения, реконструируют целевое изображение объекта в целевое время, являющееся одним из моментов времени между первым временем и вторым временем и которое включено в угловое сечение, отличное от первого и второго угловых сечений, на основании первой информации. Способ реконструкции томографического изображения выполняется посредством томографического аппарата. Использование группы изобретений позволяет уменьшить нечеткость изображения, вызванную артефактами движения. 2 н. и 13 з.п. ф-лы, 34 ил.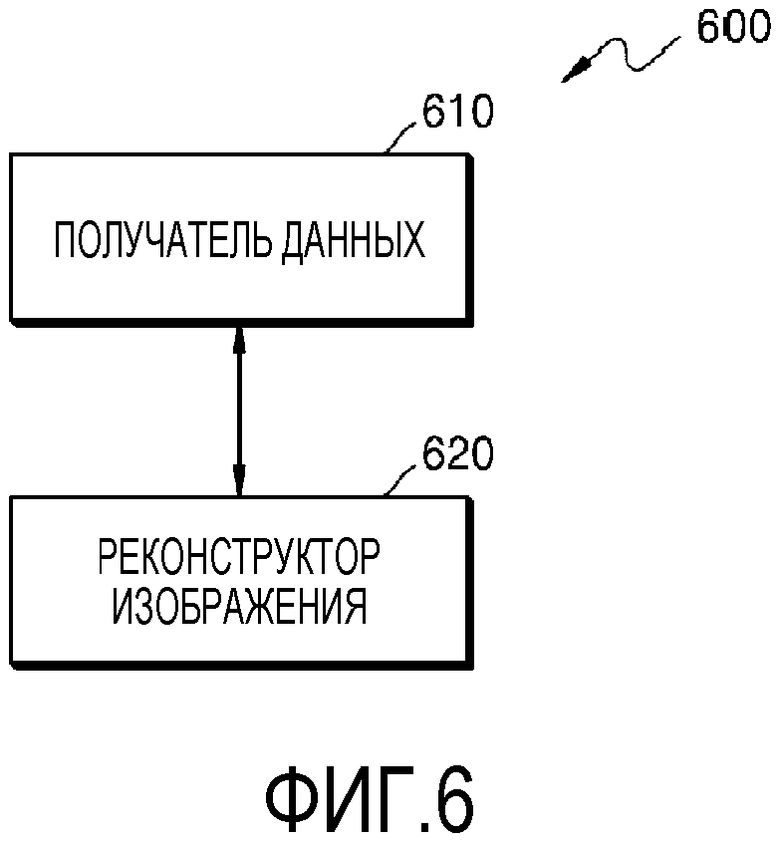
1. Томографический аппарат, содержащий один или более процессоров, которые:
получают частичные изображения объекта, которые используются для получения первой информации, указывающей величину движения объекта, и включают в себя первое изображение, полученное в первое время посредством использования данных, полученных в первом угловой сечении, которое имеет угол менее 180° и в которое включено первое время, и второе изображение, полученное во второе время посредством использования данных, полученных во втором угловом сечении, находящемся напротив первого углового сечения, которое имеет угол менее 180° и в которое включено второе время, причем второе угловое сечение не перекрывается с первым угловым сечением;
получают первую информацию, указывающую величину движения объекта, посредством использования первого изображения и второго изображения и
реконструируют целевое изображение объекта в целевое время, которое является одним из моментов времени между первым временем и вторым временем и включено в угловое сечение, отличное от первого и второго угловых сечений, на основании первой информации.
2. Томографический аппарат по п. 1, причем первая информация получается путем сравнения только первого изображения и второго изображения.
3. Томографический аппарат по п. 1, причем объект, изображенный на первом изображении, и объект, изображенный на втором изображении, отличаются друг от друга в по меньшей мере одном из размера, положения и формы.
4. Томографический аппарат по п. 1, причем моменты времени выбираются между первым временем и вторым временем, отличающимися друг от друга, а
степень коррекции движения объекта на целевом изображении варьируется в ответ на то, что целевое время выбирается соответствующим упомянутым моментам времени.
5. Томографический аппарат по п. 1, причем целевое время выбирается соответствующим среднему углу между первым угловым сечением и вторым угловым сечением, и
на целевом изображении коррекция движения объекта улучшается в ответ на то, что целевое время выбрано соответствующим среднему углу, по сравнению с коррекцией движения объекта, когда целевое время не соответствует среднему углу.
6. Томографический аппарат по п. 1, причем первая информация указывает величину движения поверхности, формирующей объект.
7. Томографический аппарат по п. 1, причем в первой информации значения моментов времени и значения величины движения поверхности, указанные как поле вектора движения между первым и вторым изображениями, имеют линейную зависимость.
8. Томографический аппарат по п. 1, причем упомянутые один или более процессоров выполнены с возможностью получения первого изображения и второго изображения посредством использования исходных данных, полученных посредством выполнения томографического сканирования в сечении за один цикл, которое составляет менее чем один оборот на 360°, а
первое угловое сечение и второе угловое сечение являются соответственно начальным сечением и конечным сечением сечения за один цикл.
9. Томографический аппарат по п. 1, причем упомянутые один или более процессоров выполнены с возможностью реконструкции целевого изображения посредством использования фрагментов данных проецирования, соответствующих проекциям, которые являются исходными данными, полученными посредством выполнения томографического сканирования при вращении поворотной рамы гантри менее чем на один оборот на 360°.
10. Томографический аппарат по п. 1, причем первая информация содержит информацию о движениях поверхности объекта во всех направлениях.
11. Томографический аппарат по п. 1, дополнительно содержащий:
устройство отображения, выполненное с возможностью отображения пользовательского интерфейса (UI), выполненного с возможностью приема информации, указывающей зависимость между временем и величиной движения объекта, в качестве первой информации,
причем упомянутые один или более процессоров выполнены с возможностью получения первой информации на основании информации, указывающей зависимость между временем и величиной движения объекта.
12. Томографический аппарат по п. 1, причем упомянутые один или более процессоров выполнены с возможностью получения данных проецирования, соответствующих сечению, имеющему угол, равный сумме 180° и дополнительного угла, и дополнительный угол составляет от примерно 30° до примерно 70°.
13. Томографический аппарат по п. 1, дополнительно содержащий устройство отображения, выполненное с возможностью отображения экрана пользовательского интерфейса, содержащего меню для установки целевого времени.
14. Способ реконструкции томографического изображения, содержащий:
получение частичных изображений объекта, которые используют для получения первой информации, указывающей величину движения объекта, и включают в себя первое изображение, полученное в первое время посредством использования данных, полученных в первом угловом сечении, которое имеет угол менее 180° и в которое включено первое время, и второе изображение, полученное во второе время посредством использования данных, полученных во втором угловом сечении, находящемся напротив первого углового сечения, которое имеет угол менее 180° и в которое включено второе время, причем второе угловое сечение не перекрывается с первым угловым сечением;
получение первой информации, указывающей величину движения объекта в моменты времени между первым временем и вторым временем, посредством использования первого изображения и второго изображения и
реконструкцию целевого изображения объекта в целевое время, которое является одним из моментов времени между первым временем и вторым временем и включено в угловое сечение, отличное от первого и второго угловых сечений, на основании первой информации.
15. Способ по п. 14, причем получение первой информации содержит получение первой информации путем сравнения только первого изображения и второго изображения.
| US 2011142315 A1, 16.06.2011 | |||
| US 2005232389 A1, 20.10.2005 | |||
| US 2002025017 A1, 28.02.2002 | |||
| ТРЕХМЕРНАЯ РЕКОНСТРУКЦИЯ ТЕЛА И КОНТУРА ТЕЛА | 2008 |
|
RU2479038C2 |

