Изобретение относится к измерительным системам и может быть использовано для контроля местоположения и управления подвижными объектами, в частности в системе контроля эксплуатации и эффективности подвижного технологического железнодорожного транспорта на основе спутниковой навигации.
Известна система контроля местоположения подвижных объектов, например подвижного железнодорожного состава, в которой вдоль пути следования подвижного объекта развернута линия индуктивной радиосвязи, имеющая N (где N>3) проводников с периодом повторения Р, расположенных со сдвигом P/N. На каждый проводник подают N-фазный электрический ток с прямой или обратной последовательностью фаз. Две транспортные антенны подвижного объекта, расположенные на некотором расстоянии друг от друга вдоль линии радиосвязи, принимают от нее сигналы. По сдвигу фаз принимаемых сигналов определяют положение объекта. В системе линия радиосвязи разделена на небольшие интервалы, на которые разделен весь путь следования объекта. На каждом интервале периоды повторения отличаются (JP 62-44226, 1987).
Недостатком системы контроля местоположения подвижных объектов является низкая точность определения положения подвижного объекта и невозможность использования его при автоматическом управлении технологическим оборудованием, установленном на локомотиве-рельсосмазывателе.
Известна система контроля местоположения подвижного железнодорожного состава, содержащая n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, навигационного приемника, вычислителя поправок, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислителя поправок, подвижной состав, состоящий из последовательно соединенных первой приемной антенны, навигационного приемника и корректора параметра, выход которого соединен с информационным входом навигационного приемника, последовательно соединенных второй приемной антенны, приемника и демодулятора, выход которого соединен со вторым входом корректора параметра, последовательно соединенных корректора скорости, вычислителя пути и вычислителя местоположения, датчика скорости, выход которого соединен с первым входом корректора скорости, блока памяти пути, выход которого соединен со вторым входом вычислителя местоположения, второй выход навигационного приемника соединен со вторым входом корректора скорости, третий выход навигационного приемника соединен со вторым входом вычислителя пути (RU 2139215, B61L 25/02, 10.10.99).
Недостатком данной системы является недостаточно высокая точность определения местоположения подвижного объекта для эффективного автоматического управления технологическим оборудованием, установленным на локомотиве-рельсосмазывателе, особенно на кривых и при смене направления движения.
В основу изобретения положена задача обеспечения повышения эффективности использования технологического железнодорожного транспорта и установленного на нем оборудования.
Технический результат изобретения заключается в повышении точности определения местоположения железнодорожного состава, характеристик пути и направления движения.
Технический результат достигается тем, что в навигационном контрольно-управляющем устройстве для локомотива-рельсосмазывателя, содержащем n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, навигационного приемника, вычислителя поправок, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислителя поправок, и подвижной состав, состоящий из последовательно соединенных первой приемной антенны, навигационного приемника и корректора параметра, выход которого соединен со вторым входом навигационного приемника, второй приемной антенны, соединенной с приемником, выход которого через демодулятор подключен ко второму входу корректора параметра, последовательно соединенных вычислителя пути и вычислителя местоположения, к которому подключен блок памяти, первый вход вычислителя пути соединен со вторым выходом навигационного приемника, согласно изобретению в подвижной состав введены корректор координат, скорости и направления, датчики линейных перемещений, датчики угловых перемещений и блок сопряжения, при этом вход корректора координат, скорости и направления соединен с третьим выходом навигационного приемника, другие входы корректора координат, скорости и направления соединены с выходами соответствующих датчиков линейных перемещений и датчиков угловых перемещений, выход корректора координат, скорости и направления соединен со вторым входом вычислителя пути, а выход вычислителя местоположения соединен с входом блока сопряжения, выход которого предназначен для подключения к системе управления форсунками рельсосмазывателя.
Повышение точности определения местоположения железнодорожного состава и, как следствие, эффективности управления установленным на нем оборудованием достигается за счет введения вышеперечисленных технических средств, позволяющих учитывать при расчетах дополнительные (по сравнению с прототипом) параметры движения.
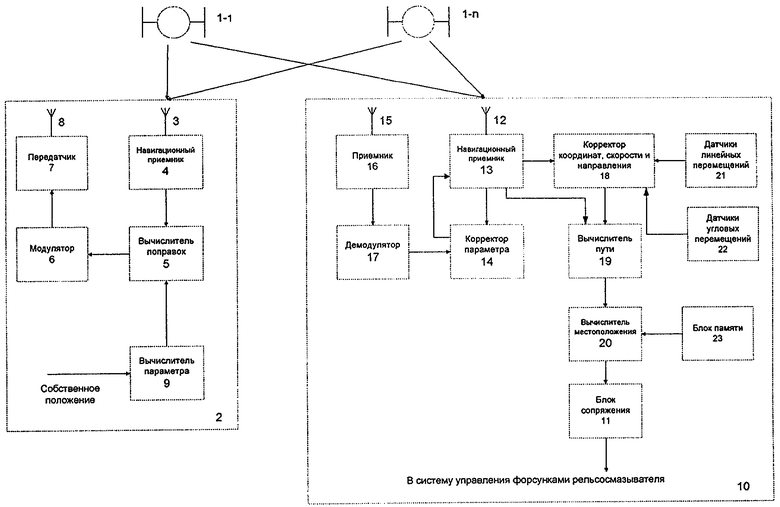
На чертеже представлена структурная схема навигационного контрольно-управляющего устройства для локомотива-рельсосмазывателя.
Навигационное контрольно-управляющее устройство для локомотива-рельсосмазывателя содержит n навигационных спутников 1-1, 1-2,…,1-n, контрольно-корректирующую станцию 2, состоящую из последовательно соединенных приемной антенны 3, навигационного приемника 4, вычислителя 5 поправок, модулятора 6, передатчика 7 и передающей антенны 8, вычислителя 9 параметра, соединенного со вторым входом вычислителя 5 поправок, и подвижной состав, состоящий из последовательно соединенных первой приемной антенны 12, навигационного приемника 13 и корректора 14 параметра, выход которого соединен со вторым входом навигационного приемника 13, второй приемной антенны 15, соединенной с приемником 16, выход которого через демодулятор 17 подключен ко второму входу корректора 14 параметра, последовательно соединенных вычислителя 19 пути и вычислителя 20 местоположения, к которому подключен блок 23 памяти, первый вход вычислителя 19 пути соединен со вторым выходом навигационного приемника 13, вход корректора 18 координат, скорости и направления соединен с третьим выходом навигационного приемника 13, другие входы корректора 18 координат, скорости и направления соединены с выходами соответствующих датчиков 21 линейных перемещений и датчиков 22 угловых перемещений, выход корректора 18 координат, скорости и направления соединен со вторым входом вычислителя 19 пути, а выход вычислителя 20 местоположения соединен с входом блока 11 сопряжения, выход которого предназначен для подключения к системе управления форсунками рельсосмазывателя.
Навигационное контрольно-управляющее устройство для локомотива-рельсосмазывателя работает следующим образом.
На контрольно-корректирующей станции 2 антенной 3 принимаются сигналы от навигационных спутников 1-1 - 1-n, например, системы ГЛОНАСС, которые обрабатываются в навигационном приемнике 4. С выхода навигационного приемника 4 сигналы, в которых содержится информация о номерах спутников, времени приема навигационных сигналов, измеренных дальностях до соответствующих спутников 1-1 - 1-n (R1 R2…Rn), поступают в вычислитель поправок 5. С выхода вычислителя параметра 9 в вычислитель поправок 5 вводится информация об эталонных дальностях ( ) до соответствующих спутников 11-1n, которые определяются в вычислителе параметра 9 по известным координатам контрольно-корректирующей станции 2. Разности измеренных и расчетных значений дальностей (поправок к дальностям) ΔR1, ΔR2…ΔRn поступают с выхода вычислителя поправок 5 на модулятор 6. В передатчике 7 они преобразуются, усиливаются и антенной 8 излучаются сигналы, содержащие информацию о номерах спутников, времени приема навигационных сигналов, значениях радионавигационных параметров, необходимую для работы подвижного состава.
) до соответствующих спутников 11-1n, которые определяются в вычислителе параметра 9 по известным координатам контрольно-корректирующей станции 2. Разности измеренных и расчетных значений дальностей (поправок к дальностям) ΔR1, ΔR2…ΔRn поступают с выхода вычислителя поправок 5 на модулятор 6. В передатчике 7 они преобразуются, усиливаются и антенной 8 излучаются сигналы, содержащие информацию о номерах спутников, времени приема навигационных сигналов, значениях радионавигационных параметров, необходимую для работы подвижного состава.
На подвижном составе 10 сигналы с контрольно-корректирующей станции 2 принимаются антенной 15, усиливаются и преобразуются в приемнике 16, а затем выделяются на выходе демодулятора 17 сигналы, содержащие информацию о номере спутника, времени приема навигационного сигнала и поправках радионавигационных параметров ΔR1, ΔR2…ΔRn сформированных вычислителем поправок 5 контрольно-корректирующей станции 2. Данная информация вводится в корректор параметра 14. Антенной 12 принимаются сигналы навигационных спутников 11-1n, которые обрабатываются в навигационном приемнике 13. С первого выхода навигационного приемника 13 сигналы, в которых содержится информация о времени приема навигационных сигналов, измеренных дальностях до соответствующих спутников 11-1n, (R1, R2…Rn), поступают на первый вход корректора параметра 14. В корректоре параметра 14 по информации об измеренных дальностях (R1, R2…Rn) из навигационного приемника 13 и поправкам к дальностям (ΔR1, ΔR2…ΔR1) из блока 17 вычисляются уточненные дальности от подвижного состава 10 до соответствующих спутников 11-1n, (), значения которых поступают в навигационный приемник 13.
В навигационном приемнике 13 по информации, полученной с выхода корректора параметра 14, определяются с высокой точностью координаты, скорость подвижного состава 10.
На соответствующие входы корректора 18 координат, скорости и направления сигналы поступают: с выходов датчиков линейных перемещений 21, которые фиксируют ускорение и направление движения состава в трех плоскостях с использованием внутренних инерциальных акселерометров, с выходов инерциальных датчиков 22 угловых перемещений, которые фиксируют данные об изменении угла наклона состава 10 в трех плоскостях, с третьего выхода навигационного приемника 13. В корректоре 18 координат, скорости и направления комплексируются данные, полученные от навигационного приемника 13, с данными, полученными от инерциальных датчиков 21 и 22. При этом происходит уменьшение погрешностей измерения координат и скорости, связанных со случайными «выбросами» и при отсутствии приема сигналов от навигационных спутников 11-1п, например, в тоннелях.
С выхода корректора 18 координат, скорости и направления информация о скорости Vc и о текущих координатах подвижного состава 10 поступает на второй вход вычислителя 19 пути. На первый вход вычислителя пути 19 поступают данные о текущем времени t от навигационного приемника 13, информация о моменте времени tc, когда нарушается прием сигналов от навигационных спутников 11-1n, например при въезде железнодорожного состава в тоннель. В вычислителе 19 пути по данным о скорости и о текущих координатах подвижного состава 10 (Vc) от блока 18 и данным о текущем времени t от приемника 13 определяется пройденный составом путь от момента времени tc по формуле П=Vc·t. Информация о пройденном пути П и координатах подвижного состава 10 для времени tc поступает с выхода вычислителя пути 19 на первый вход вычислителя местоположения 20. На второй вход вычислителя местоположения 20 поступают данные от блока памяти 23. В блоке 23 памяти хранится информация о характере железнодорожного пути, например, в тоннеле (радиус кривизны, уклон пути, длина тоннеля и т.д.). В вычислителе 20 местоположения по информации от блока 23 и от блока 19 определяется местоположение подвижного состава 10 в тоннеле, полученные данные выводятся из вычислителя 20 местоположения в блок сопряжения 11. По вычисленному местоположению определяются режим работы оборудования рельсосмазывания и момент включения-выключения форсунок, распыляющих смазку. Управление работой форсунок осуществляется сигналами с выхода блока 11 сопряжения. При этом на пульт индикации, расположенный в кабине машиниста, выдается необходимая информация о ходе процесса рельсосмазывания.
Алгоритмы расчета местоположения контрольно-корректирующей станции 2 и подвижного состава 11 по данным, полученным от навигационных спутников 11-1n, приведены, например, в кн. «Сетевые спутниковые радионавигационные системы», под ред. В.С.Шебшаевича. 2-е изд., М.: Радио и связь, 1993, с.46, 220. Алгоритмы расчета местоположения подвижного состава 10 с высокой точностью на основании информации, полученной на контрольно-корректирующей станции 2 и переданной на подвижной состав 10, приведены, например, на с.285-288. Алгоритмы расчета скорости движения подвижного состава 10 приведены на с.223, 235.
Таким образом, использование предлагаемого навигационного контрольно-управляющего устройства для локомотива-рельсосмазывателя обеспечивает повышение точности определения местоположения железнодорожного состава, характеристик пути, направления движения и, как следствие, эффективности управления установленным на нем оборудованием.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2004 |
|
RU2265543C2 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |
| СИСТЕМА ДЛЯ СОЗДАНИЯ БАЗЫ ДАННЫХ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2195408C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2002 |
|
RU2272731C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2001 |
|
RU2219084C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ УСТРОЙСТВОМ ЛУБРИКАЦИИ НА ЛОКОМОТИВЕ-РЕЛЬСОСМАЗЫВАТЕЛЕ | 2011 |
|
RU2478506C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2115140C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НАДВОДНОГО ОБЪЕКТА | 1999 |
|
RU2152049C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
Изобретение относится к измерительным системам и может быть использовано для контроля местоположения и управления подвижными объектами, в частности в системе контроля эксплуатации и эффективности подвижного технологического железнодорожного транспорта на основе спутниковой навигации. Навигационное контрольно-управляющее устройство для локомотива-рельсосмазывателя содержит n навигационных спутников, контрольно-корректирующую станцию и подвижной состав. Контрольно-корректирующая станция состоит из приемной антенны, навигационного приемника, вычислителя поправок, модулятора, передатчика и передающей антенны, вычислителя параметра. Устройство на подвижном составе состоит из первой приемной антенны, навигационного приемника и корректора параметра, второй приемной антенны, соединенной с приемником, демодулятора, вычислителя пути и вычислителя местоположения, блока памяти, корректора координат, скорости и направления, датчиков линейных перемещений и датчиков угловых перемещений, блока сопряжения, выход которого предназначен для подключения к системе управления форсунками рельсосмазывателя. Технический результат изобретения заключается в повышении точности определения местоположения железнодорожного состава, характеристик пути и направления движения. 1 ил.
Навигационное контрольно-управляющее устройство для локомотива-рельсосмазывателя, содержащее n навигационных спутников, контрольно-корректирующую станцию, состоящую из последовательно соединенных приемной антенны, навигационного приемника, вычислителя поправок, модулятора, передатчика и передающей антенны, вычислителя параметра, соединенного со вторым входом вычислителя поправок, и подвижной состав, состоящий из последовательно соединенных первой приемной антенны, навигационного приемника и корректора параметра, выход которого соединен со вторым входом навигационного приемника, второй приемной антенны, соединенной с приемником, выход которого через демодулятор подключен ко второму входу корректора параметра, последовательно соединенных вычислителя пути и вычислителя местоположения, к которому подключен блок памяти, первый вход вычислителя пути соединен со вторым выходом навигационного приемника, отличающееся тем, что в подвижной состав введены корректор координат, скорости и направления, датчики линейных перемещений, датчики угловых перемещений и блок сопряжения, при этом вход корректора координат, скорости и направления соединен с третьим выходом навигационного приемника, другие входы корректора координат, скорости и направления соединены с выходами соответствующих датчиков линейных перемещений и датчиков угловых перемещений, выход корректора координат, скорости и направления соединен со вторым входом вычислителя пути, а выход вычислителя местоположения соединен с входом блока сопряжения, выход которого предназначен для подключения к системе управления форсунками рельсосмазывателя.
| РЕЛЬСОСМАЗЫВАТЕЛЬ | 1998 |
|
RU2149113C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2004 |
|
RU2265543C2 |
| Покрытые электроды для наплавки режущего инструмента | 1948 |
|
SU81210A1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |

