Изобретение относится к авиационной технике и может использоваться при строительстве летательных аппаратов тяжелее воздуха и для модернизации существующих вертолетов.
Известен летательный аппарат вертикального взлета и посадки с переменной геометрией крыловидного ротора, содержащий фюзеляж, несущий винт и устройство его преобразования в неподвижное крыло. В самолетном режиме полета несущий винт фиксируется, преобразуясь в крыло прямой или обратной стреловидности.
Недостаток такого преобразователя летательных аппаратов и его конструкции состоит в том, что механизм преобразования несущего винта в крыло переменной геометрии имеет сложный характер, обуславливает и сложность управления летательным аппаратом в переходном режиме преобразования вертолета в самолет [патент США №3490720, МПК В64С 3/40; U.S.Cl. 244-7].
Наиболее близким по технической сущности к заявляемому изобретению является летательный аппарат вертикального взлета-посадки с жестким X-образным крылом-ротором, обладающим повышенной циркуляцией и подъемной силой за счет выдувания воздуха через щель над задней кромкой каждой лопасти при помощи аналога автомата перекоса воздушного потока [Бауэре П. Летательные аппараты нетрадиционных схем. - М.: Мир, 1991; с.142].
Существенным недостатком этого летательного аппарата является сложность конструкции и синхронного управления хвостовым фенестроном и двумя боковыми турбореактивными двигателями при переходе с вертикального на горизонтальный полет.
Техническая задача настоящего изобретения состоит в упрощении и повышении надежности конструкции конвертолета при сохранении традиционного управления вертолетом без боковых реактивных двигателей и фенестрона и повышение маневренности летательного аппарата.
Для решения поставленной задачи заявляется:
конвертолет, содержащий вертолетный фюзеляж, маршевый двигатель, редуктор, жесткий несущий винт с фиксированными лопастями, устройство его преобразования в неподвижное крыло, автомат перекоса воздушного потока, хвостовую балку и оперение с компенсатором реактивного момента несущего винта. В отличие от прототипа жесткий несущий винт состоит из трех симметричных фиксированных относительно друг друга лопастей с сечением, имеющим выпуклый верхний и двояковогнутый нижний контуры; лопасти образуют единое Y-образное крыло-ротор, на внешних концах которого установлены преимущественно по нормали к поверхности лопасти с возможностью осевого поворота лопатки, соединенные с автоматом перекоса воздушного потока через горизонтальные тяги и секторные рычаги в продольных полостях лопастей крыла-ротора. На хвостовом оперении конвертолета установлены два жестких пропеллера со сходящимися за хвостовой балкой фюзеляжа осями, которые имеют два реверсивных электропривода, подключенных к стартер-генератору маршевого двигателя через электрическую схему перераспределения его мощности.
Конвертолет дополнительно содержит хвостовое оперение фюзеляжа - вертикальный киль с рулем поворота, и в его носовой части - два горизонтальных руля высоты и крена по схеме "утка" с центром тяжести ниже фокуса аэродинамических сил.
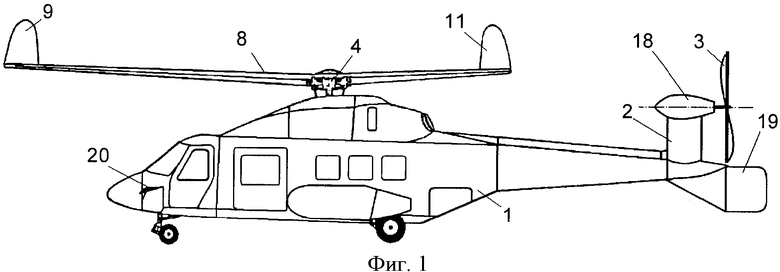
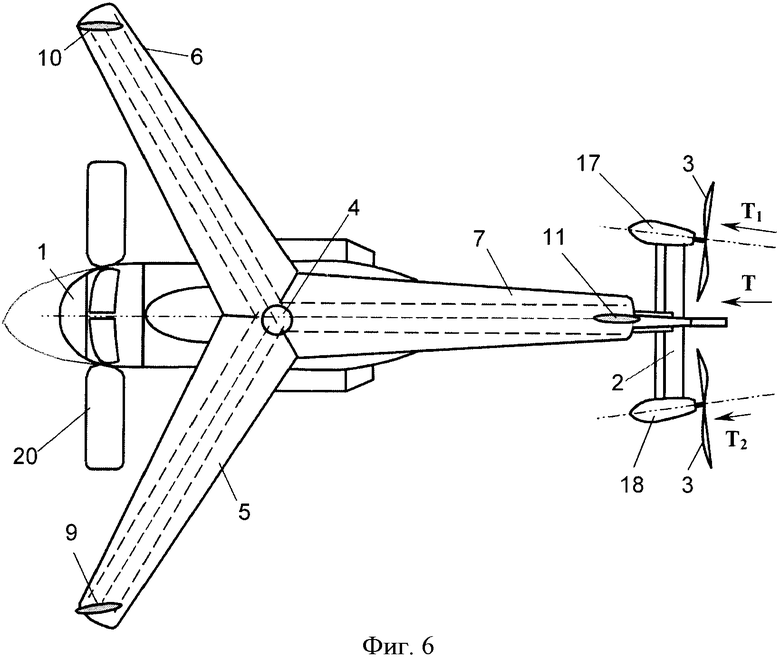
Сущность изобретения поясняется чертежом, где на фигуре 1 дан боковой вид предлагаемого конвертолета в самолетной конфигурации; на фигуре 2 - его вид сверху; на фигуре 3 - вид спереди; на фигуре 4 представлен продольный разрез несущего винта, на котором показан секторный рычаг преобразования управления вертикальными лопатками на лопастях; на фигуре 5 - сечение лопасти крыла-ротора; на фигуре 6 - вид конвертолета сверху с зафиксированными лопастями с обратной стреловидностью; на фигуре 7 - вид конвертолета сбоку для варианта установки вертикальных лопаток на нижней поверхности лопастей.
Предлагаемый конвертолет (фигура 1) содержит вертолетный фюзеляж 1, на хвостовом оперении 2 которого установлены два жестких пропеллера постоянного шага 3 со сходящимися за хвостом осями под углом α=20°÷30° в плоскости ометаемой поверхности несущего винта 4. Размещение хвостовых пропеллеров с осью вращения под углом к продольной оси конвертолета позволяет увеличить рычаг 2r для пары сил тяги T1 и Т2, противодействующей реактивному моменту М несущего винта, до величины, сопоставимой с радиусом R ометаемой поверхности несущего винта, что значительно повышает эффективность работы хвостовых пропеллеров. Положительным результатом является также то, что практически исчезает взаимное влияние воздушных потоков обоих пропеллеров друг на друга и на воздушный поток несущего винта. Над фюзеляжем расположен жесткий несущий винт 4, состоящий из трех фиксированных относительно друг друга лопастей 5-7, образующих единое Y-образное квазитреугольное симметричное крыло-ротор 8 (фигура 2), на внешних концах которого установлены на оси три лопатки 9-11, преимущественно по нормали к поверхности лопастей. Лопатки закреплены с возможностью осевого поворота в пределах 180° при помощи радиальных рычагов 12, установленных на их осях внутри продольных полостей лопастей Y-образного крыла-ротора 8. Эти рычаги через продольные тяги 13 и секторные рычаги 14 (фигура 4), установленные в нижней прорези 15 Y-образного крыла-ротора, связаны с исполнительными органами автомата перекоса 16 воздушного потока. Три лопатки Y-образного крыла-ротора могут быть установлены как на верхней поверхности лопастей 5-7, так и на нижней поверхности лопастей, как показано на фигуре 7. Лопатки на нижней поверхности крыла-ротора работают с большей эффективностью ввиду того, что под крылом-ротором скорость воздушных потоков больше, чем в верхнем пространстве над крылом-ротором. Назначение и функционирование лопаток аналогично при любой их установке.
При этом маршевый двигатель и редуктор выполнены с регулируемым отбором механической мощности к несущему винту 4 и электрической мощности к реверсивным электродвигателям 17-18 пропеллеров 3 от стартер-генератора, например, через электрическую схему перераспределения его мощности, используя регулируемый электропривод системы двигатель-генератор (стартер-генератор, маршевый двигатель и редуктор на фигурах не изображены).
Для улучшения управляемости конвертолетом в переходных режимах на его фюзеляже дополнительно могут быть установлены хвостовой вертикальный аэродинамический руль 19, а также горизонтальные рули высоты и крена 20 по схеме "утка" с центром тяжести летательного аппарата, расположенным ниже фокуса аэродинамических сил (фигуры 1, 3). Такая компоновка летательного аппарата обеспечивает ему достаточно высокую устойчивость и маневренность, в том числе и при полете хвостом вперед в самолетном режиме, что фактически является новой фигурой высшего пилотажа.
Перед вертикальным взлетом в вертолетном режиме, как обычно, стартер-генератором запускают маршевый двигатель, который раскручивает несущий винт 4 в виде Y-образного крыла-ротора 8. Аэродинамические поверхности лопастей 5-7 образованы (фигура 5) выпуклой верхней поверхностью rв и двояковогнутой нижней поверхностью rн. Симметричная форма контура сечения лопастей позволяет создавать подъемную силу при любом направлении вращения несущего винта и при поступательном движении летательного аппарата с зафиксированным крылом-ротором, что расширяет возможности маневрирования конвертолета наряду с повышением надежности и устойчивости. Возникающий реактивный момент М уравновешивается парой сил T1 и Т2 хвостовых пропеллеров 3, которые вращаются реверсивными электродвигателями 17-18. Эти двигатели подключены через регулирующую схему управления оборотами стартер- генератора, которая перераспределяет мощность маршевого двигателя между пропеллерами 3 и несущим винтом 4. При этом подъемная сила крыла-ротора конвертолета существенно зависит от положения лопаток 9-11, задаваемых рычагом шаг-газа и рукояткой управления автоматом перекоса 16, связанного с радиальными рычагами 12 этих лопаток через секторный рычаг 14 и горизонтальные тяги 13. Так, если передние относительно направления вращения кромки лопаток 9-11 направлены вовнутрь ометаемой поверхности крыла-ротора 8, то часть воздушного потока отбрасывается им за пределы ометаемой поверхности и тяга несущего винта уменьшается. Тем самым повышается устойчивость конвертолета на земле перед взлетом при запущенных двигателях.
При вертикальном взлете передние кромки лопаток 9-11 ориентированы наружу. В этом режиме часть периферийного воздушного потока дополнительно направляется в ометаемую поверхность крыла-ротора, и подъемная сила несущего винта 4 увеличивается.
После вертикального взлета лопатки 9-11 за счет периодического заданного изменения угла атаки обеспечивают и горизонтальную силу тяги несущего винта путем направленного наддува воздушного потока и создания аэродинамических сил управления циркуляцией. Горизонтальная сила тяги Т усиливается перераспределением мощности электропривода между толкающим (тяга T1) и тянущим назад (тяга Т2) пропеллерами 3 (увеличивают мощность привода 17 и уменьшают мощность привода 18).
Переход на самолетный режим полета осуществляется за счет сброса механической мощности, подводимой к несущему винту 4, и плавного реверса тяги Т2 в направлении полета при помощи схемы управления электродвигателями 17-18. Благодаря этому конвертолет ускоряется и некоторое время летит, как автожир, который может также управляться рулями 19 и 20. В это время лопатки 9-11 устанавливаются параллельно друг другу и продольной оси фюзеляжа 1, вращение несущего винта 4 замедляется, и он останавливается во флюгерном положении, которое фиксируется соответствующим тормозным или сцепным устройством (не изображены).
Причем положение заторможенных лопастей 5-7 определяется очередностью флюгерной установки лопаток 9-11.
Если вдоль одной из лопастей крыла-ротора 8, например лопасти 5 на фигуре 2, сначала устанавливают одну лопатку 9, то Y-образное крыло-ротор останавливается в положении прямой стреловидности, а потом две другие лопатки 10-11 устанавливают параллельно продольной оси конвертолета, как показано на фигуре 2. Если же сначала установить рукояткой управления автоматом перекоса две лопатки 9-10 параллельно и симметрично оси несущего винта (фигура 6), то крыло- ротор останавливается в положении обратной стреловидности с продольной лопастью 7, направленной вдоль хвостовой балки фюзеляжа, что заметно меняет центровку всего летательного аппарата и расширяет возможности управления полетом со скоростью, значительно выше вертолетной.
Преобразование самолета в вертолет происходит в обратном порядке с постепенным снижением горизонтальной скорости и перераспределением мощности между пропеллерами 3 и несущим винтом 4.
Таким образом, простая и надежная конструкция предлагаемого конвертолета с жестким исполнением несущего винта и хвостовых пропеллеров постоянного шага и пространственной ориентации обеспечивает высокую эффективность и традиционное управление на всех режимах полета, что допускает поэтапную модернизацию существующих вертолетов с одним несущим винтом и исключает сложную механическую трансмиссию и управление через хвостовую балку рулевым винтом обычного вертолета.
Упрощение и повышение надежности и маневренности конвертолета по сравнению с прототипом достигается ввиду того, что отсутствуют боковые турбореактивные двигатели, фенестрон и центральный компрессор с воздуховодами и щелевыми прорезями в крыле-роторе. Более высокая маневренность достигается также применением двух хвостовых пропеллеров постоянного шага с реверсивными электроприводами при сохранении традиционных органов управления.
Предложенная техника и технология соответствует применяемым конструкциям и технологиям на авиационных производствах.




Изобретение относится к авиационной технике. Конвертолет содержит вертолетный фюзеляж (1), жесткий несущий винт (4) с фиксированными лопастями (5, 6, 7), образующими единое Y-образное симметричное крыло-ротор. На внешних концах крыла установлены с возможностью осевого поворота лопатки (9, 10, 11), соединенные с автоматом перекоса воздушного потока через горизонтальные тяги (13) и секторные рычаги в продольных полостях крыла-ротора. На хвостовом оперении (2) установлены два жестких пропеллера (3) со сходящимися за хвостовой балкой фюзеляжа осями, имеющие реверсивные электроприводы, подключенные к стартер-генератору маршевого двигателя через электрическую схему перераспределения его мощности. Изобретение упрощает конструкцию, повышает надежность и маневренность. 3 з.п. ф-лы, 7 ил.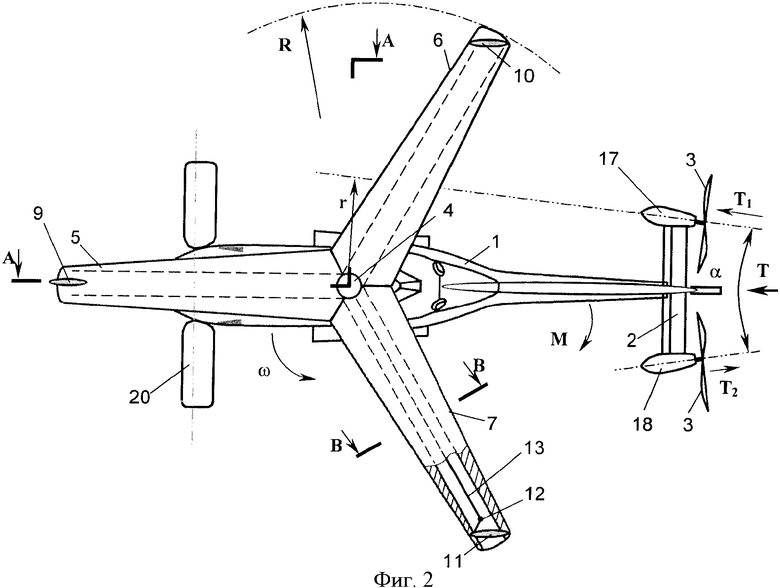
1. Конвертолет, содержащий вертолетный фюзеляж, маршевый двигатель, редуктор, жесткий несущий винт с фиксированными лопастями, устройство его преобразования в неподвижное крыло, автомат перекоса воздушного потока, хвостовую балку и оперение с компенсатором реактивного момента несущего винта, отличающийся тем, что жесткий несущий винт состоит из трех фиксированных относительно друг друга лопастей с сечением, имеющим выпуклый верхний и двояковогнутый нижний контуры, лопасти образуют единое Y-образное симметричное крыло-ротор, на внешних концах которого установлены преимущественно по нормали к поверхностям лопастей с возможностью осевого поворота лопатки, соединенные с рычагом шаг-газа и автоматом перекоса воздушного потока через горизонтальные тяги и секторные рычаги в продольных полостях лопастей крыла-ротора, а на хвостовом оперении установлены два жестких пропеллера со сходящимися за хвостовой балкой фюзеляжа осями, которые имеют два реверсивных электропривода, подключенных к стартер-генератору маршевого двигателя через электрическую схему перераспределения его мощности.
2. Конвертолет по п.1, отличающийся тем, что лопатки установлены на верхней поверхности лопастей несущего крыла-ротора.
3. Конвертолет по п.1, отличающийся тем, что лопатки установлены на нижней поверхности лопастей несущего крыла-ротора.
4. Конвертолет по п.1, отличающийся тем, что хвостовое оперение фюзеляжа дополнительно содержит вертикальный киль с рулем поворота, а в его носовой части - два горизонтальных руля высоты и крена по схеме "утка" с центром тяжести ниже фокуса аэродинамических сил.
| П.Бауэрс «Летательные аппараты нетрадиционных схем» | |||
| - М.: «Мир», 1991, с.142 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2212358C1 |
| US 4928907 А, 29.05.1990 | |||
| US 5727754 А, 17.03.1998. | |||

