Устройство для передвижения платформы-поддона автоматизированной системы парковки автомобилей относится к парковочным системам открытых и закрытых парковок автомобилей, обеспечивая максимальную плотность использования парковочной площади при одноуровневом горизонтальном размещении автомобилей.
Заявляемое изобретение используется в автоматизированной системе открытой или закрытой парковки автомобилей различных внешних габаритов (заявка №2008103504, дата подачи 04.02.2008 «Автоматизированная система открытой или закрытой парковки автомобилей»).
Известно решение «Платформа для приема автомобилей» (патент Германии 19962542 А1, класс 7 Е04Н 6/22), в котором платформа содержит средства присоединения к другой платформе, причем средства присоединения выполнены таким образом, что при движении платформы поперек плоскости парковки сцепное устройство освобождается, платформа снабжена траверсой, на которой расположены средства присоединения.
Известно также «Устройство для передвижения поддона» (патент Японии 3403034 В2, 11131856 А, класс 7 Е04Н 6/30), в котором устройство имеет коробчатую форму для горизонтальной циркуляции, поддон перемещается в устройстве от неподвижной направляющей к подвижной, при этом направляющая крепится к тележке, и поддон вместе с тележкой движутся по уклону тянущим и толкающим усилием привода. При движении поддон входит в неподвижный, отдельно установленный ролик, направление движения поддона изменяется на горизонтальное, а тележка продолжает двигаться по уклону для отделения от поддона. Конструкции платформы для приема автомобилей и устройства для передвижения поддона могут быть применены только для определенного вида парковочных сооружений и не могут быть использованы для автоматизированной системы открытой или закрытой парковки автомобилей при одноуровневом горизонтальном размещении автомобилей, с максимальной плотностью использования парковочной площади.
Задача, на решение которой направлено данное изобретение - низкая удельная металлоемкость, простота в изготовлении и эксплуатации, низкие эксплуатационные расходы.
Технический результат - максимальная плотность использования парковочной площади при одноуровневом горизонтальном размещении автомобилей.
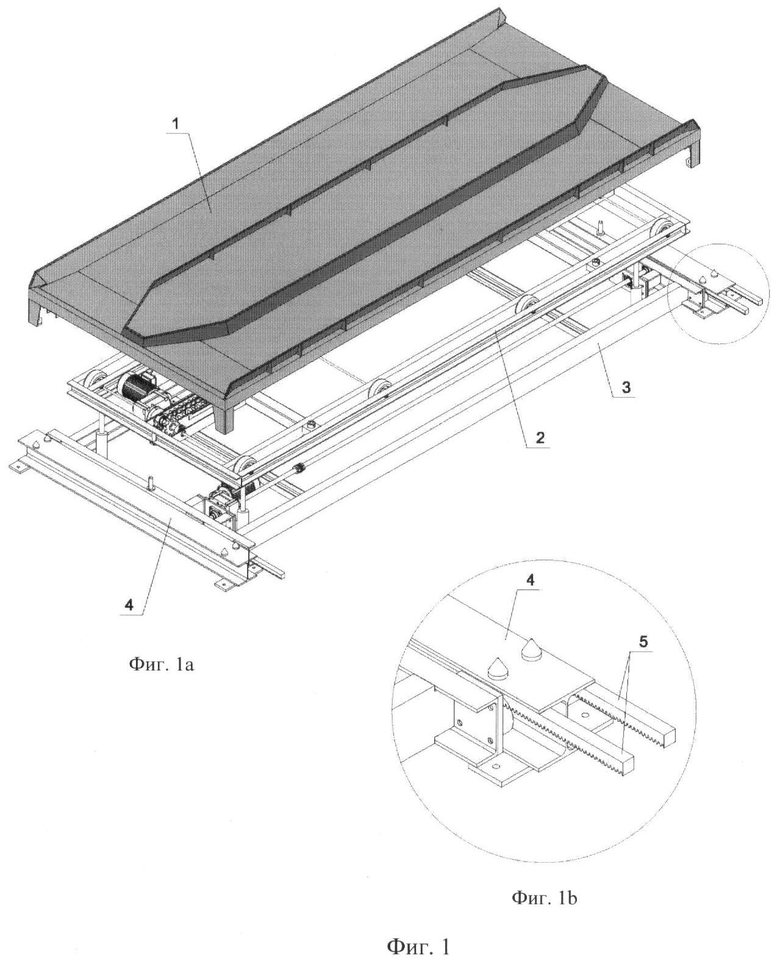
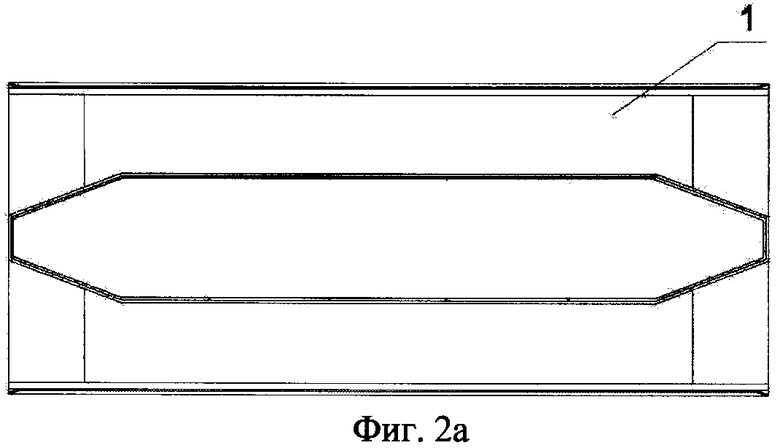
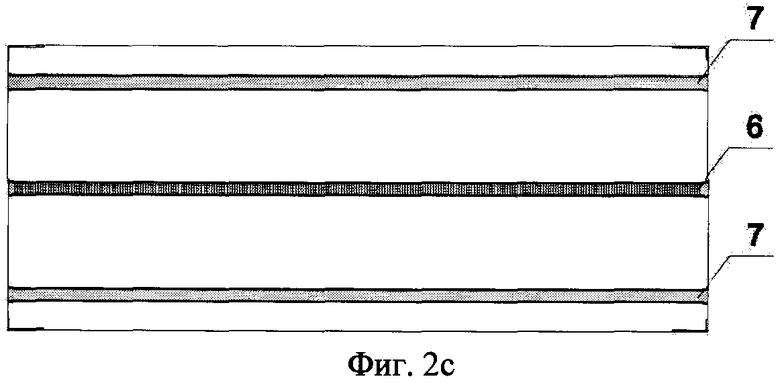
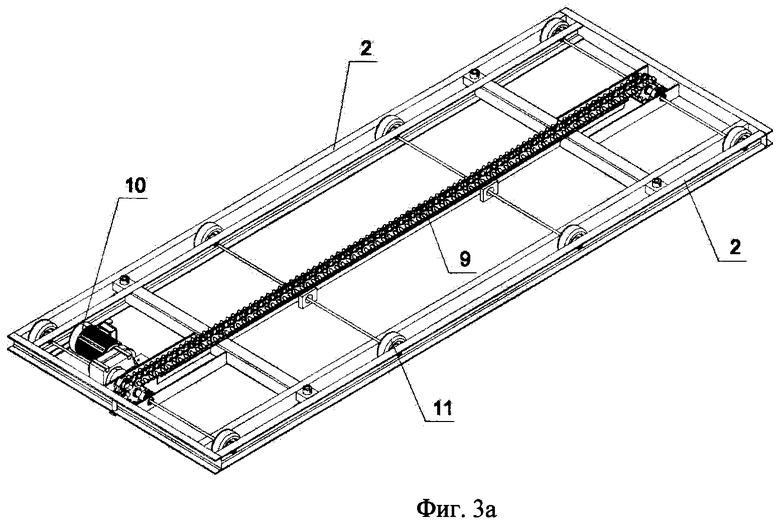
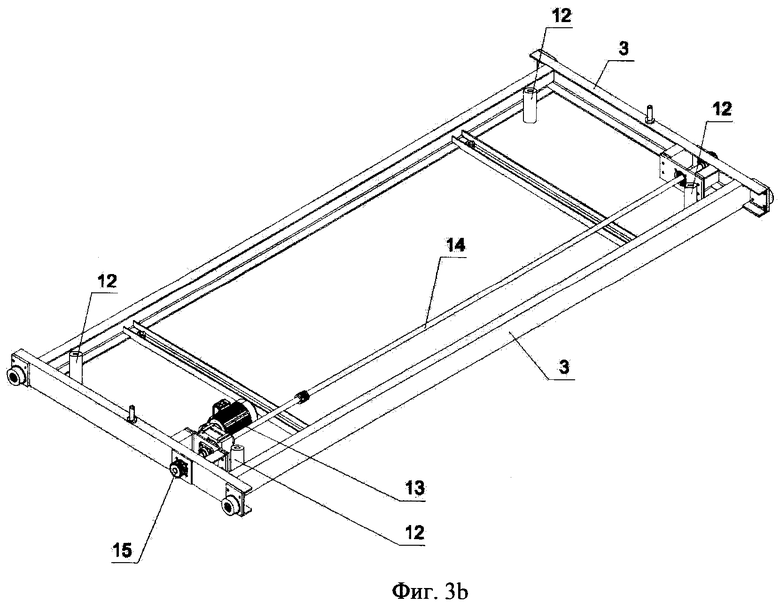
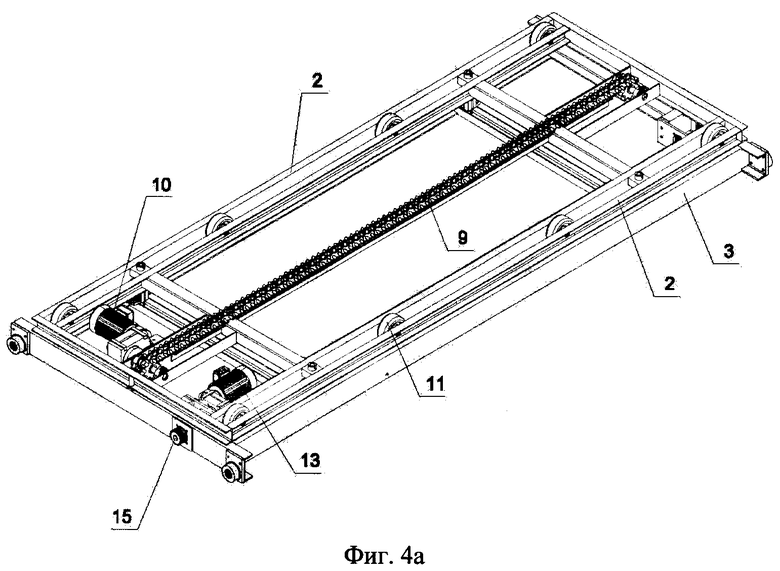
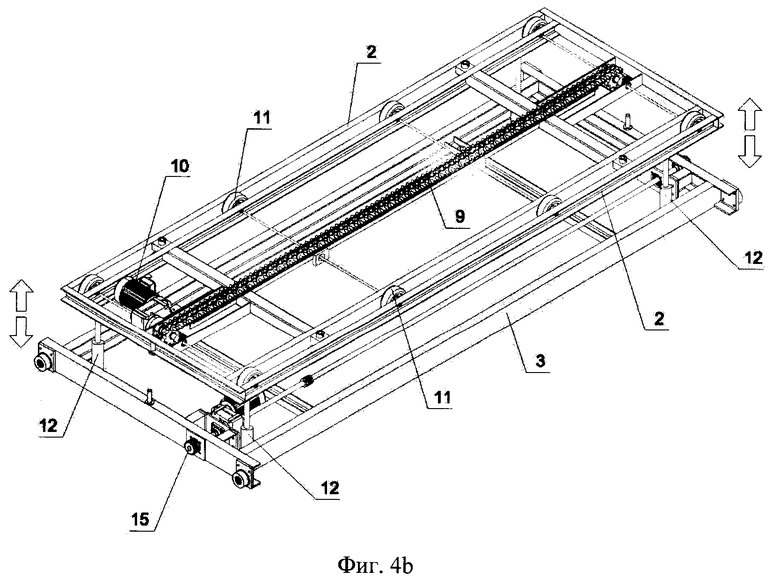
Данный технический результат достигается тем, что устройство для передвижения платформы-поддона автоматизированной системы парковки автомобилей содержит платформу-поддон 1 (Фиг.1), тележку-манипулятор, изготовленную из двух подвижно соединенных между собой рам: верхней рамы 2 и нижней несущей рамы 3, каркас, состоящий из параллельно установленных металлических направляющих 4, изготовленных в виде рельсов, на внутренней поверхности которых расположены зубчатые рейки 5 (Фиг.1). На платформе-поддоне 1 (Фиг.2), выполненной в соответствии с размером тележки-манипулятора, снизу по всей длине в центре установлена зубчатая рейка 6, по краям которой расположены две направляющие 7 для фиксированного перемещения платформы-поддона по роликам, а в углах установлены четыре фиксатора 8. По всей длине в центре верхней рамы 2 тележки-манипулятора (Фиг.3) установлена цепь 9 и мотор-редуктор 10 для вращения цепи. Размер зубьев зубчатой рейки 6 платформы-поддона 1 соразмерен шагу зубьев цепи верхней рамы тележки-манипулятора. По краям верхней рамы 2 тележки-манипулятора установлены ролики 11 для перемещения по ним платформы-поддона. На нижней несущей раме тележки-манипулятора установлены четыре подъемных механизма 12 для поднятия - опускания верхней рамы и мотор-редуктор 13 с карданным валом 14 для передвижения тележки-манипулятора вдоль металлических направляющих. На внешней поверхности нижней несущей рамы тележки-манипулятора выполнены звездочки 15 для их сцепления с зубчатыми рейками металлических направляющих каркаса при перемещении по ним тележки-манипулятора.
Заявляемое изобретение представлено на следующих чертежах:
фиг.1 - конструкция устройства для передвижения платформы-поддона (фиг.1а - общий вид устройства для передвижения платформы-поддона в сборе, фиг.1в - узел А): 1 - платформа-поддон; 2 - верхняя рама; 3 - нижняя несущая рама; 4 - металлические направляющие каркаса; 5 - зубчатая рейка;
фиг.2 - конструкция платформы-поддона (фиг.2а - вид сверху на платформу-поддон, фиг.2в - схематическое изображение автомобиля на платформе-поддоне, фиг.2с - вид снизу на платформу-поддон): 6 - зубчатая рейка тележки-манипулятора; 7 - направляющие для фиксированного перемещения платформы-поддона по роликам; 8 - фиксатор;
фиг.3 - конструкция тележки-манипулятора (фиг.3а - вид верхней рамы тележки-манипулятора, фиг.3в - вид нижней несущей рамы тележки-манипулятора): 9 - зубчатая цепь; 10 - мотор-редуктор; 11 - ролики; 12 - подъемный механизм; 14 - карданный вал; 15 - звездочки;
фиг.4 - конструкция тележки-манипулятора в сборе (фиг.4а - вид тележки-манипулятора с соединенными верхней рамой и нижней несущей рамой, фиг.4в - вид тележки-манипулятора с верхней рамой, приподнятой по отношению к нижней несущей раме).
Заявляемое изобретение осуществляется следующим образом. Конструкция платформы-поддона представляет собой жесткую прямоугольную металлическую раму, размеры которой зависят от внешних габаритов автомобилей, помещаемых на платформу-поддон, и строго соответствуют размерам тележки-манипулятора. Снизу на платформе-поддоне в центре по всей длине установлена стальная зубчатая рейка, размер зубьев которой соразмерен шагу звеньев цепи, установленной по всей длине в центре верхней рамы тележки-манипулятора и приводимой в движение мотор-редуктором. Мотор-редуктор вращает цепь, обеспечивая через сцепленную с ней зубчатую рейку перемещение платформы-поддона в поперечном направлении с одной тележки-манипулятора на другую тележку-манипулятор. Перемещение платформы-поддона фиксируют две направляющие, расположенные снизу по краям платформы-поддона, при взаимодействии их с роликами, установленными по краям верхней рамы тележки-манипулятора. В четырех углах платформы-поддона снизу укреплены четыре фиксатора для жесткой фиксации платформы-поддона на несущей нижней раме тележки-манипулятора или на поверхности металлических направляющих каркаса. Конструкция тележки-манипулятора состоит из верхней рамы и нижней несущей рамы. Верхняя рама тележки-манипулятора подвижно соединена с ее нижней несущей рамой. На нижней несущей раме расположены четыре подъемных механизма для поднятия - опускания верхней рамы, с размещенной на ней платформой-поддоном. На нижней несущей раме установлен мотор-редуктор с карданным валом для передвижения тележки-манипулятора вдоль металлических направляющих каркаса. Звездочки, расположенные на внешней поверхности нижней несущей рамы и соединенные через карданный вал с мотор-редуктором, выполнены для сцепления с зубчатыми рейками металлических направляющих каркаса при перемещении по ним тележки-манипулятора. Конструкция каркаса состоит из параллельно установленных металлических направляющих, образующих параллельно расположенные сегменты-секции, строго соразмерные с размерами тележки-манипулятора. Передвижение тележки-манипулятора, ограниченное двумя параллельно установленными металлическими направляющими каркаса в рамках сегментов-секций, осуществляется компьютерной системой управления парковки автомобилей. После получения команды из пункта управления тележка-манипулятор начинает передвижение вдоль металлических направляющих каркаса и останавливается под платформой-поддоном, указанной системой управления. Подъемные механизмы нижней несущей рамы тележки-манипулятора поднимают верхнюю раму, на которую устанавливается и прочно фиксируется платформа-поддон с размещенной на ней автомашиной при помощи фиксаторов. Цепь верхней рамы приводится в движение мотор-редуктором и входит во взаимодействие с зубчатой рейкой платформы-поддона, начиная передвигать платформу-поддон с автомобилем по роликам верхней рамы с одной тележки-манипулятора на другую в продольном направлении. Таким образом, обеспечивается передвижение автомашины с платформой-поддоном во все четыре стороны парковки.
Заявляемое устройство максимально просто в изготовлении, надежно и применимо для эксплуатации в любых климатических зонах, при любых внешних температурах на открытых и закрытых парковках, обладает низкой удельной металлоемкостью и низкими эксплуатационными расходами, позволяет достигать максимальной плотности размещения паркуемых автомобилей различных габаритов.

Изобретение относится к парковочным системам открытых и закрытых парковок автомобилей, обеспечивающих максимальную плотность использования парковочной площади при одноуровневом горизонтальном размещении автомобилей. Устройство для передвижения платформы-поддона автоматизированной системы парковки автомобилей содержит платформу-поддон, тележку-манипулятор и каркас, состоящий из параллельно установленных металлических направляющих. Тележка-манипулятор изготовлена из двух подвижно соединенных между собой рам, верхней рамы и нижней несущей рамы, на которой расположены подъемные механизмы для поднятия - опускания верхней рамы. Мотор-редуктор, соединенный через карданный вал со звездочками, обеспечивает передвижение тележки-манипулятора вдоль металлических направляющих каркаса. На платформе-поддоне, выполненной в соответствии с размером тележки-манипулятора, снизу по всей длине в центре установлена стальная зубчатая рейка, размер зубьев которой соразмерен шагу звеньев цепи, установленной по всей длине в центре верхней рамы и соединенной с мотором-редуктором. По всей длине тележки-манипулятора, по краям платформы-поддона снизу расположены две направляющие для фиксированного перемещения по роликам платформы-поддона с одной тележки-манипулятора на другую в продольном направлении. На верхней раме в центре по всей длине направляющей установлена цепь, которая, взаимодействуя с зубчатой рейкой платформы-поддона, служит для ее перемещения в поперечном направлении с одной тележки-манипулятора на другую. На верхней раме установлен мотор-редуктор, вращающий цепь. Металлические направляющие каркаса выполнены в виде двух параллельно установленных рельсов, на внутренней поверхности которых по всей длине расположены зубчатые рейки для перемещения по ним вдоль металлических направляющих тележки-манипулятора. Технический результат: максимальная плотность использования парковочной площади при одноуровневом горизонтальном размещении автомобилей. 4 ил.
Устройство для передвижения платформы-поддона автоматизированной системы парковки автомобилей, содержащее платформу-поддон, тележку-манипулятор и каркас, состоящий из параллельно установленных металлических направляющих, отличающееся тем, что тележка манипулятор изготовлена из двух подвижно соединенных между собой рам, верхней рамы и нижней несущей рамы, на которой расположены подъемные механизмы для поднятия-опускания верхней рамы, мотор-редуктор, соединенный через карданный вал со звездочками, для передвижения тележки-манипулятора вдоль металлических направляющих каркаса на платформе-поддоне, выполненной в соответствии с размером тележки-манипулятора, снизу по всей длине в центре установлена стальная зубчатая рейка, размер зубьев которой соразмерен шагу звеньев цепи, установленной по всей длине в центре верхней рамы тележки-манипулятора, по краям платформы-поддона снизу расположены две направляющие для ее фиксированного перемещения по роликам, установленным по краям верхней рамы тележки-манипулятора, металлические направляющие каркаса изготовлены в виде рельсов, на внутренней поверхности которых по всей длине расположены зубчатые рейки.
| JP 11131856 А, 18.05.1999 | |||
| DE 19962542 A1, 12.07.2001 | |||
| Гараж для автомобилей | 1991 |
|
SU1795059A1 |
| RU 2064038 C1, 20.07.1996 | |||
| Гараж для автомобилей | 1971 |
|
SU836325A1 |

