Изобретение относится к электротехнике, в частности к области автоматизированного электропривода (ЭП), и может быть использовано для создания электропривода с постоянной скоростью вращения вала электродвигателя.
Известен ЭП с автоматической стабилизацией скорости вращения двигателя [1], содержащий электродвигатель, тахогенератор, блок управления, в качестве которого используется магнитный усилитель, установленный в цепи питания электродвигателя.
При увеличении момента сопротивления на валу электродвигателя, например вследствие уменьшения температуры окружающей среды, уменьшается скорость вращения его ротора и, соответственно, электродвижущая сила (эдс) тахогенератора. При этом разность между задающим напряжением и эдс тахогенератора увеличивается. Это приводит к увеличению степени подмагничивания магнитного усилителя и уменьшению индуктивности его рабочих обмоток. Напряжение на выходе магнитного усилителя возрастает, и скорость вращения ротора, и соответственно вала, электродвигателя увеличивается.
Недостатками этого ЭП являются большое отклонение (~10%) скорости вращения вала электродвигателя от стабилизируемого значения и большой занимаемый им объем.
Меньшее отклонение скорости вращения вала электродвигателя от стабилизируемого значения достигнуто в ЭП [2], являющемся наиболее близким по технической сущности и достигаемому результату и выбранном в качестве прототипа.
ЭП содержит электродвигатель постоянного тока ДПР32-Н6-02, кинематически соединенный с тахогенератором, блок управления, в качестве которого используется регулятор скорости РС-0-08-03М и на который подаются гармонические сигналы с тахогенератора.
При этом первый вывод электродвигателя предназначен для подачи на него постоянного напряжения от источника питания, а второй вывод электродвигателя соединен с регулятором скорости РС-0-08-03М.
Указанный ЭП позволяет стабилизировать скорость вращения вала электродвигателя постоянного тока с отклонением не более 1% от стабилизируемого значения за время, равное или более 5 сек.
Так как указанный ЭП является аналоговым, он не позволяет стабилизировать скорость вращения вала электродвигателя постоянного тока с отклонением менее 1% от стабилизируемого значения. Кроме того, указанный ЭП занимает большой объем, равный 130 см3.
Задачей изобретения является повышение точности стабилизации скорости вращения вала электродвигателя постоянного тока и уменьшение объема ЭП.
Сущность изобретения заключается в том, что в электроприводе, содержащем блок управления и электродвигатель, кинематически соединенный с тахогенератором, при этом первый вывод электродвигателя предназначен для подачи на него постоянного напряжения, в отличие от прототипа, блок управления содержит первый и второй компараторы, микропроцессор, RS-триггер, интегратор, первый, второй и третий ключи, генератор тока, при этом выход тахогенератора электрически связан с входом первого компаратора, выход которого электрически связан с входом микропроцессора, выход которого электрически связан с S входом RS-триггера и управляющим выводом второго ключа, неинвертирующий выход RS-триггера электрически связан с управляющим выводом первого ключа, первый вывод которого электрически связан со вторым выводом электродвигателя, а второй вывод предназначен для подачи на него постоянного напряжения, инвертирующий выход RS-триггера электрически связан с управляющим выводом третьего ключа, R вход RS-триггера электрически связан с выходом второго компаратора, неинвертирующий вход которого электрически связан с выходом интегратора, инвертирующий вход которого электрически связан с первыми выводами второго и третьего ключей, а неинвертирующий вход предназначен для подачи на него первого опорного напряжения, инвертирующий вход второго компаратора предназначен для подачи на него второго опорного напряжения и электрически связан через первый резистор со вторым выводом второго ключа и через второй резистор с вторым выводом третьего ключа, электрически связанным также с выходом генератора тока, первый вывод которого электрически связан с первым выводом электродвигателя, а второй вывод электрически связан со вторым выводом первого ключа.
Возможно выполнение интегратора ЭП содержащим операционный усилитель и конденсатор, электрически связанный с инвертирующим входом операционного усилителя и с его выходом.
Выполнение блока управления ЭП содержащим первый и второй компараторы, микропроцессор, RS-триггер, интегратор, первый, второй и третий ключи, генератор тока, электрическое соединение выхода тахогенератора с входом первого компаратора, выход которого электрически связан с входом микропроцессора, выход которого электрически связан с S входом RS-триггера и управляющим выводом второго ключа, электрическое соединение неинвертирующего выхода RS-триггера с управляющим выводом первого ключа, первый вывод которого электрически связан со вторым выводом электродвигателя, а второй вывод предназначен для подачи на него постоянного напряжения, электрическое соединение инвертирующего выхода RS-триггера с управляющим выводом третьего ключа, электрическое соединение R входа RS-триггера с выходом второго компаратора, неинвертирующий вход которого электрически связан с выходом интегратора, инвертирующий вход которого электрически связан с первыми выводами второго и третьего ключей, а неинвертирующий вход предназначен для подачи на него первого опорного напряжения, предназначение инвертирующего входа второго компаратора для подачи на него второго опорного напряжения и электрическое соединение его через первый резистор со вторым выводом второго ключа и через второй резистор с вторым выводом третьего ключа, электрически связанным также с выходом генератора тока, позволяет, во-первых, применить цифровую обработку управляющего сигнала и, таким образом, повысить точность стабилизации скорости вращения вала электродвигателя ЭП, во-вторых, уменьшить занимаемый ЭП объем.
Возможное выполнение интегратора ЭП содержащим операционный усилитель и конденсатор, электрически связанный с инвертирующим входом операционного усилителя и с его выходом, позволяет реализовать простую схему интегратора.
Полезная модель поясняется чертежом.
На чертеже представлена электрическая схема ЭП.
ЭП содержит электродвигатель 1, в качестве которого используется электродвигатель постоянного тока ДПР32-Н6-02, кинематически соединенный с тахогенератором 2 путем размещения на едином вале ротора его и тахогенератора, и блок управления 3.
Блок управления 3 содержит первый и второй компараторы 4 и 5, соответственно, микропроцессор 6, первый, второй и третий ключи 7, 8 и 9, соответственно, RS-триггер 10, интегратор 11, генератор тока 12, первый и второй резисторы 13 и 14, соответственно.
Первый вывод электродвигателя 1 предназначен для подачи на него постоянного напряжения от источника питания (на чертеже не показан).
Выход тахогенератора 2 электрически связан с входом первого компаратора 4, выход которого электрически связан с входом микропроцессора 6, выход которого электрически связан с S входом RS-триггера 10 и управляющим выводом второго ключа 8.
Неинвертирующий выход Q RS-триггера 10 электрически связан с управляющим выводом первого ключа 7, первый вывод которого электрически связан со вторым выводом электродвигателя 1, а второй вывод предназначен для подачи на него постоянного напряжения от источника питания, инвертирующий выход Q RS-триггера 10 соединен с управляющим выводом третьего ключа 9.
R вход RS-триггера 10 электрически связан с выходом второго компаратора 5, неинвертирующий вход которого электрически связан с выходом интегратора 11, инвертирующий вход которого электрически связан с первыми выводами второго и третьего ключей 8 и 9, соответственно, а его неинвертирующий вход предназначен для подачи на него первого опорного напряжения U1 от источника питания (не показан).
Инвертирующий вход второго компаратора 5 предназначен для подачи на него второго опорного напряжения U2 от источника питания (не показан) и электрически связан через первый резистор 13 со вторым выводом второго ключа 8 и через второй резистор 14 с вторым выводом третьего ключа 9, электрически связанным также с выходом генератора тока 12, первый вывод которого электрически связан с первым выводом электродвигателя 1, а второй вывод электрически связан со вторым выводом первого ключа 7.
Возможно выполнение интегратора 11 содержащим операционный усилитель 15 и конденсатор 16, электрически связанный с инвертирующим входом операционного усилителя 15 и с его выходом.
Блок управления 3 обеспечивает периодическое импульсное замыкание цепи питания электродвигателя 1 и автоматическую регулировку длительности импульсов замыкания цепи питания электродвигателя 1 для достижения определенной стабилизированной скорости вращения вала электродвигателя 1.
Первый и второй компараторы 4 и 5 выполнены каждый на микросхеме LMV7239M5, микропроцессор 6 выполнен на микросхеме ATMEGA8-16AU, выполняющей программно функции пропорционально-интегрального (ПИ) регулятора, а также аппаратно и программно выполняющей функции широтноимпульсного модулятора (ШИМ).
RS-триггер 10 выполнен на двух микросхемах 74HC1G02GW, интегратор 11 выполнен с использованием операционного усилителя TS952ID 15 и конденсатора 16, электрически связанного с инвертирующим входом операционного усилителя 15 и с его выходом, однако возможно и другое выполнение интегратора 11.
Первый ключ 7 включает в себя полевой транзистор 17 типа ZXMN6A08E6 и электрически связанный с его управляющим выводом резистор 18 величиной 10 кОм, ограничивающий ток управления. Второй 8 и третий 9 ключи выполнены на микросхемах ADG719BRTZ.
Генератор тока 12 выполнен с использованием операционного усилителя TS952ID, первый вывод которого электрически связан с первым выводом электродвигателя 1, а второй вывод электрически связан со вторым выводом первого ключа 7 и управляется напряжением питания ЭП.
Напряжение источника (не показан) первого опорного напряжения U1 выбрано меньше напряжения источника (на чертеже не показан) второго опорного напряжения U2.
Параллельно электродвигателю постоянного тока ДПР32-Н6-02 1 соединен диод 19, в качестве которого используется диод ZLLS400, защищающий электродвигатель 1 от бросков напряжения при закрывании первого ключа 7.
ЭП работает следующим образом.
Во время работы электродвигателя 1 гармонический сигнал с тахогенератора 2 поступает на первый компаратор 4, который преобразует его в прямоугольные импульсы с частотой следования гармонического сигнала. В микропроцессоре 6 измеряется период следования выработанных первым компаратором 4 прямоугольных импульсов и сравнивается с опорным временным интервалом, соответствующим заданной стабилизируемой скорости вращения вала электродвигателя 1.
Величина ошибки, пропорциональная разности периода следования указанных прямоугольных импульсов и опорного временного интервала, обрабатывается в микропроцессоре 6 по программе ПИ регулятора, реализованного программно, которая вычисляет величину управляющего воздействия после прихода каждого импульса с тахогенератора 2. Значение величины управляющего воздействия заносится в регистр сравнения ШИМ микропроцессора 6 и после прихода каждого импульса с тахогенератора 2 на выходе ШИМ микропроцессора 6 генерируется сигнальный импульс, длительность которого пропорциональна величине управляющего воздействия. При этом частота следования сигнальных импульсов на выходе ШИМ микропроцессора 6 равна частоте гармонического сигнала с тахогенератора 2.
Сигнальный импульс ШИМ микропроцессора 6 поступает на вход S RS-триггера 10 и на управляющий вывод второго ключа 8. При этом на неинвертирующем выходе Q RS-триггера 10 появляется сигнальный импульс, поступающий на управляющий вывод первого ключа 7. Указанный сигнальный импульс через резистор 18 поступает на управляющий вывод полевого транзистора 17 и открывает его.
При этом цепь питания ЭП от источника питания замыкается и включается электродвигатель 1.
Одновременно с выхода микропроцессора 6 сигнальный импульс ШИМ поступает на управляющий вывод второго ключа 8 и включает его, а сигнальный импульс с инверсного выхода Q RS-триггера 10 включает третий ключ 9.
При этом через инверсный вход интегратора 15 при открывании ключей 8 и 9 начинает течь суммарный ток, являющийся суммой токов через первый 13 и второй 14 резисторы, соответственно, и тока генератора тока 12, управляемого напряжением питания ЭП. При этом выходное напряжение интегратора 15 начинает уменьшаться от начального значения, равного второму опорному напряжению U2.
В промежутке времени от 0 до длительности ТШИМ сигнального импульса ШИМ микропроцессора 6, пока сигнальный импульс с выхода ШИМ микропроцессора 6 равен логической единице и поступает на вход S RS-триггера 10 и на управляющий вывод второго ключа 8, напряжение на выходе интегратора 15 будет уменьшаться, и на момент времени ТШИМ (момент перехода сигнального импульса с выхода ШИМ микропроцессора 6 в состояние логического нуля) выходное напряжение интегратора 15 будет отличаться от U2 на определенную схемой ЭП величину.
В момент времени ТШИМ величина сигнального импульса на выходе ШИМ микропроцессора 6 изменяется от уровня логической единицы до уровня логического нуля. При этом второй ключ 8 выключается, a RS - триггер 10 не изменит своего состояния, поэтому первый ключ 7 будет включен, а электродвигатель 1 продолжит работать.
После выключения второго ключа 8 напряжение на выходе интегратора 15 начнет увеличиваться и достигнет первоначального уровня U2 в момент времени Тэп, который определяется схемой ЭП из условия стабилизации скорости вращения вала электродвигателя

где Uпит - мгновенное значение напряжение питания ЭП; Е - ЭДС самоиндукции электродвигателя на заданной скорости вращения; Uпит.мах. - максимальное значение напряжения питания ЭП, при котором достигается заданная стабилизируемая скорость вращения вала электродвигателя 1.
При достижении напряжения U2 на выходе интегратора 15 произойдет срабатывание второго компаратора 5, и на его выходе появится сигнал (логическая единица), который сбросит RS-триггер 10 в исходное состояние, что вызовет закрывание первого ключа 7 и обесточивание электродвигателя 1.
Таким образом, ЭП обеспечивает питание электродвигателя 1 импульсами, частота которых равна частоте гармонического сигнала с тахогенератора 2, а длительность пропорциональна разности мгновенной и заданной стабилизируемой скоростей вращения вала электродвигателя 1. При этом при колебаниях питающего напряжения, например, в условиях питания от генератора, через несколько секунд после изменения питающего напряжения восстанавливается заданная стабилизируемая скорость вращения вала электродвигателя 1.
Так поддерживается определенная заданная стабилизированная скорость вращения вала электродвигателя 1.
При этом наличие цифровой обработки сигналов позволяет получить точность стабилизации скорости вращения вала электродвигателя 1 в рассмотренном ЭП не более 0,1% за время 5 сек и более. Объем ЭП составляет 35 см3.
Соответственно, в заявляемом ЭП достигается повышение точности стабилизации скорости вращения вала электродвигателя постоянного тока и уменьшение занимаемого объема.
Источники информации
1. Анхимюк В.Л. Теория автоматического управления. - Минск. Вышэйшая школа, 1979. - С.83-86.
2. Прицел-прибор наведения 1К13. Техническое описание и инструкция по эксплуатации 1465.00.00.000ТО. - С.33-35, 100. - Прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1376069A1 |
| Устройство для измерения числа пускотормозных режимов электрической машины | 1991 |
|
SU1795390A1 |
| БЕСКОНТАКТНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2001 |
|
RU2187195C2 |
| Устройство для защиты от изменения заданной скорости вращения электропривода постоянного тока | 1985 |
|
SU1377957A1 |
| Генератор пилообразного напряжения | 1990 |
|
SU1758854A1 |
| Бесконтактный тахогенератор | 1981 |
|
SU949504A1 |
| Компенсационно-параметрический импульсный стабилизатор постоянного напряжения | 1987 |
|
SU1437845A1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ПЕРЕГРУЗКИ И "СУХОГО ХОДА" ЭЛЕКТРОДВИГАТЕЛЯ ПОГРУЖНОГО ЭЛЕКТРОНАСОСА | 2005 |
|
RU2309298C2 |
| СЧЕТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2001 |
|
RU2190860C2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ПОГРУЖНОГО ЭЛЕКТРОНАСОСА ОТ ПЕРЕГРУЗКИ И "СУХОГО ХОДА" | 2009 |
|
RU2397588C1 |
Изобретение относится к области электротехники и может быть использовано для создания электропривода с постоянной скоростью вращения ротора электродвигателя. Техническим результатом является повышение точности стабилизации скорости вращения якоря электродвигателя постоянного тока при изменениях напряжения питания. Электропривод содержит блок управления, электродвигатель, тахогенератор, при этом блок управления содержит два компаратора, микропроцессор, RS-триггер, интегратор, три ключа, генератор тока. Указанные элементы электрически связаны между собой так, как указано в формуле изобретения. 1 з.п. ф-лы, 1 ил.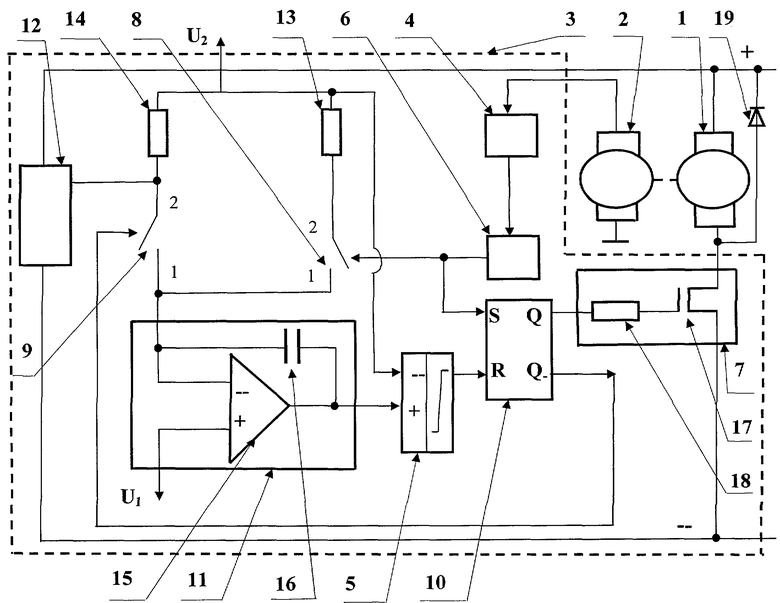
1. Электропривод, содержащий блок управления и электродвигатель, кинематически соединенный с тахогенератором, при этом первый вывод электродвигателя предназначен для подачи на него постоянного напряжения, отличающийся тем, что блок управления содержит первый и второй компараторы, микропроцессор, RS-триггер, интегратор, первый, второй и третий ключи, генератор тока, при этом выход тахогенератора электрически связан с входом первого компаратора, выход которого электрически связан с входом микропроцессора, выход которого электрически связан с S входом RS-триггера и управляющим выводом второго ключа, неинвертирующий выход RS-триггера электрически связан с управляющим выводом первого ключа, первый вывод которого электрически связан со вторым выводом электродвигателя, а второй вывод предназначен для подачи на него постоянного напряжения, инвертирующий выход RS-триггера электрически связан с управляющим выводом третьего ключа, R вход RS-триггера электрически связан с выходом второго компаратора, неинвертирующий вход которого электрически связан с выходом интегратора, инвертирующий вход которого электрически связан с первыми выводами второго и третьего ключей, а неинвертирующий вход предназначен для подачи на него первого опорного напряжения, инвертирующий вход второго компаратора предназначен для подачи на него второго опорного напряжения и электрически связан через первый резистор со вторым выводом второго ключа и через второй резистор - со вторым выводом третьего ключа, электрически связанным также с выходом генератора тока, первый вывод которого электрически связан с первым выводом электродвигателя, а второй вывод электрически связан со вторым выводом первого ключа.
2. Электропривод по п.1, отличающийся тем, что интегратор содержит операционный усилитель и конденсатор, электрически связанный с инвертирующим входом операционного усилителя и с его выходом.
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 2004 |
|
RU2280315C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2003 |
|
RU2258297C2 |
| Электропривод с импульсным управлением | 1990 |
|
SU1753572A1 |
| СПОСОБ АНАЛИЗА КЛЕТОЧНОГО СОСТАВА КРОВИ ПО МАЗКУ | 1998 |
|
RU2147123C1 |
| US 2007098373 A1, 03.05.2007 | |||
| DE 4444810 A1, 20.06.1996 | |||
| JP 2008172867 A, 24.07.2008 | |||
| ТРИГГЕР НА ДВУХОБМОТОЧНОЛ1 РЕЛЕПАП? | 0 |
|
SU352397A1 |
| WO 97212168 A1, 12.06.1997. | |||

