ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к сервопресс-машине, которая включает в себя конденсатор источника питания привода, приводит в движение сервомотор на основании информации о движении пресс-штемпеля и осуществляет операцию штамповки путем преобразования вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля.
Пресс-машина, в которой использован сервомотор, позволяет пользователю легко устанавливать или выбирать движение пресс-штемпеля (например, в JP-A-2003-205395). В частности, скорость пресс-штемпеля можно менять произвольно. Более того, пресс-штемпель можно временно останавливать и движение пресс-штемпеля можно реверсировать путем реверсирования вращения сервомотора. Поэтому можно повысить пригодность для штампуемых продуктов, а также производить продукты высокого качества.
В такой сервопресс-машине секция управления вращением двигателя управляет вращением сервомотора на основании информации о движении пресс-штемпеля (сигналов команды движения), установленной заблаговременно. Приводной механизм пресс-штемпеля принимает энергию вращения, генерируемую вращением двигателя, приводящего в движение пресс-штемпель. Как и приводной механизм пресс-штемпеля, был известен также механизм эксцентрикового привода, механизм кулисного привода и винтовой приводной механизм. Среди них с точки зрения структуры или функции в основном был использован механизм эксцентрикового привода (кривошипно-шатунный механизм или структура вала эксцентрика). Информация о движении пресс-штемпеля создается, как о положении пресс-штемпеля, соответствующем каждому такту (времени или углу).
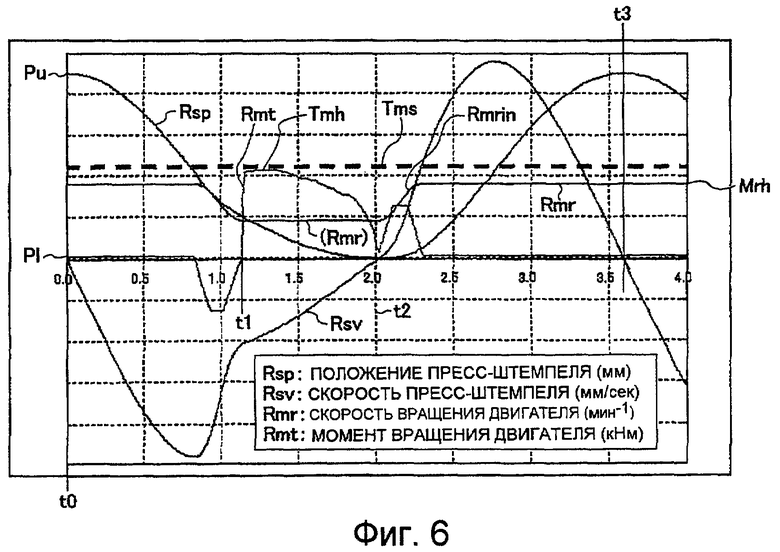
Фиг.6 иллюстрирует случай использования кривошипно-шатунного механизма. Положение пресс-штемпеля перемещается вниз от верхней мертвой точки (положение Pu) к нижней мертвой точке (положение Pl) вдоль траектории Rsp (т.е. информация о движении пресс-штемпеля), а затем перемещается вверх к верхней мертвой точке. Скорость пресс-штемпеля обозначена траекторией Rsv.
В частности, пресс-штемпель начинает перемещаться вниз в момент времени t0 (0,0 сек) по горизонтальной оси. Скорость пресс-штемпеля снижается непосредственно перед моментом времени t1 для достижения мягкого касания. Вращающий момент двигателя (траектория Rmt), таким образом, понижается. Таким образом, возникает формовочная область (время t1-t2). Нижняя мертвая точка достигается в момент времени t2, а верхняя мертвая точка достигается в момент времени t3 (примерно 3,6 сек). В частности, один такт (производственный цикл) составляет 3,6 сек.
Скорость вращения двигателя, соответствующая движению пресс-штемпеля (траектория Rsp), показанного на Фиг.6, обозначена траекторией Rmr. Например, при выполнении операции глубокой вытяжки, двигатель приводится в действие на низкой скорости для улучшения качества. Двигатель ускоряется непосредственно после завершения формовки (после момента времени t2) вдоль траектории ускорения Rmrin до достижения высокой скорости (допустимой максимальной скорости вращения Mrh).
В качестве меры для повышения регулируемости скорости было предложено устройство (JP-A-2001-352773), которое точно оценивает инерцию нагрузки, которая изменяется в течение работы, путем вычислений, и т.п. и которая автоматически корректирует постоянную регулирования скорости.
Момент вращения (траектория Rmt) быстро повышается от минимального значения до момента времени t1, при котором формовочная нагрузка (нагрузка) достигает максимального момента вращения формовки Tmh. Момент вращения двигателя снижается после завершения формовки (момент времени t2). Момент вращения затем повышается за счет момента, необходимого для ускорения скорости вращения. Допустимый максимальный момент вращения Tms, обозначенный жирной пунктирной линией, обозначает допустимый максимальный момент вращения сервомотора в ходе формовки. Производительность сервомотора и производительность секции управления вращением двигателя, включающего в себя секцию управления местоположением/скоростью, секцию управления током, и т.п. выбирают в соответствии с допустимым максимальным моментом вращения.
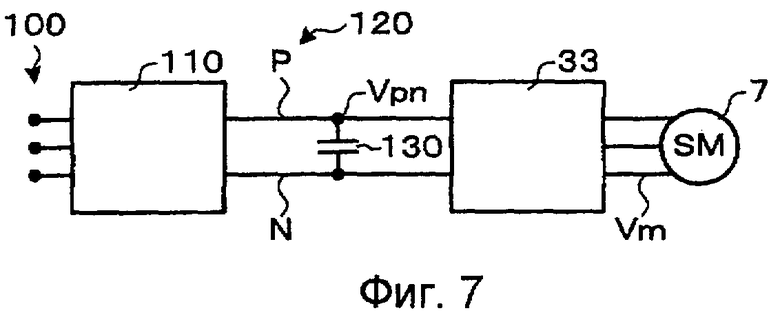
Известно устройство (например, JP-A-2007-282367) источника питания привода двигателя, которое генерирует напряжение источника питания привода (постоянного тока) на основании напряжения источника питания (переменного тока). Данный тип устройства источника питания обычно используют в качестве устройства источника питания сервопресс-машины. На Фиг.7 устройство 110 источника питания включает в себя схему выпрямителя, коммутационную схему и т.п. и генерирует напряжение источника питания привода (постоянного тока) на основании входного напряжения источника питания (переменного тока) от системы 100 питания. Устройство 110 источника питания и секция 33 регулирования тока (который образует часть секции управления вращением двигателя) соединены через положительный и отрицательный каналы 120 источника питания. Конденсатор 130 подключен между положительным P каналом источника питания и отрицательным N каналом источника питания. Ток возбуждения подают от секции 33 регулирования тока к сервомотору 7.
Нагрузка (момент Rmt) сервопресс-машины повышается в области формовки (время t1-t2) и понижается в области вертикального хода до и после области формовки, как описано выше. Изменение нагрузки сервопресс-машины очень велико по сравнению с другими производственными машинами. В частности, изменение нагрузки в течение одного производственного цикла (один такт пресс-штемпеля) достаточно велико. Поэтому емкость конденсатора 130 относительно велика для достижения функции сглаживания напряжения источника питания привода (напряжения Vpn) и функции согласования (конденсатора). Емкость конденсатора тщательно исследуют и подходящим образом выбирают с точки зрения снижения емкостей устройства 110 источника питания и системы 100 источника питания, а также снижения затрат. В частности, конденсатор 130 высвобождает большое количество энергии (напряжения источника питания привода) в ходе формовки и подает напряжение источника питания привода на секцию 33 регулирования тока. Индуцированное напряжение сервомотора 7 обозначают как Vm.
При выполнении высококачественной операции формовки скорость Rsv пресс-штемпеля в области формовки относительно снижается. Скорость пресс-штемпеля повышают, насколько возможно, по всей области, с точки зрения повышения производительности. В частности, пользователь выполняет операцию штамповки при выборе на производственном участке различных типов движения пресс-штемпеля (траектория Rsp). Однако движение пресс-штемпеля не выбирают с учетом соотношения между емкостями и характеристиками секции 33 управления вращением двигателя, сервомотора 7, системы 100 источника питания, устройства 110 источника питания, конденсатора 130 и т.п.
В частности, несоответствие между выбранным или заданным движением пресс-штемпеля и функциями устройства и характеристиками приводит к нестабильной работе. Более того, такая нестабильная работа может возникнуть или не возникнуть, в зависимости от опыта и навыков пользователя. В частности, причины нестабильной работы можно и не определить.
Поэтому может возникнуть ситуация, при которой работу необходимо будет остановить или при которой возникает неисправная работа или поломка устройства. Это приводит к снижению производительности и повышению себестоимости продукции.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно первому аспекту изобретения здесь предусмотрена сервопресс-машина, которая включает в себя конденсатор, подключенный между положительным каналом источника питания и отрицательным каналом источника питания, которые соединяют устройство источника питания и секцию управления вращением электродвигателя, приводит во вращение сервомотор, на основании информации о движении пресс-штемпеля, при подаче напряжения источника питания привода, и выполняет операцию штамповки, при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля, причем сервопресс-машина определяет, является ли напряжение источника питания привода между положительным каналом источника питания и отрицательным каналом источника питания ниже, чем индуцированное напряжение сервомотора, и корректирует данные, относящиеся к скорости, на основании информации о движении пресс-штемпеля, когда сервопресс-машина определила, что напряжение источника питания привода ниже, чем индуцированное напряжение.
Согласно второму аспекту изобретения предусмотрена сервопресс-машина, которая включает в себя конденсатор, подключенный между положительным каналом источника питания и отрицательным каналом источника питания, которые соединяют устройство источника питания и секцию управления вращением двигателя, приводит во вращение сервомотор, на основании информации о движении пресс-штемпеля, при подаче напряжение источника питания привода, и осуществляет операцию штамповки, при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля, причем сервопресс-машина содержит:
- средство вычисления напряжение источника питания привода, которое вычисляет напряжение источника питания привода между положительным каналом источника питания и отрицательным каналом источника питания с использованием информации о движении пресс-штемпеля;
- средство вычисления индуцированного напряжения, которое вычисляет индуцированное напряжение сервомотора с использованием информации о движении пресс-штемпеля;
- средство определения состояния напряжения с низким уровнем, которое определяет, является ли вычисленное напряжение источника питания привода при заранее определенном времени ниже, чем вычисленное индуцированное напряжение, соответствующее напряжению источника питания привода; и
- средство вывода команды коррекции, которое выводит команду коррекции для данных, относящихся к скорости, содержащихся в информации о движении пресс-штемпеля, когда средство определения состояния напряжения с низким уровнем определило, что вычисленное напряжение источника питания привода ниже, чем вычисленное индуцированное напряжение.
Согласно третьему аспекту изобретения предусмотрена сервопресс-машина, которая включает в себя конденсатор, подключенный между положительным каналом источника питания и отрицательным каналом источника питания, которые соединяют устройство источника питания и секцию управления вращением двигателя, приводит во вращательное движение сервомотор, на основании информации о движении пресс-штемпеля, при подаче напряжения источника питания привода, и осуществляет операцию штамповки, при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля, причем сервопресс-машина содержит:
- средство обнаружения напряжения источника питания привода, которое обнаруживает напряжение источника питания привода между положительным каналом источника питания и отрицательным каналом источника питания;
- средство обнаружения индуцированного напряжения, которое обнаруживает индуцированное напряжение сервомотора;
- средство определения состояния напряжения с низким уровнем, которое определяет, является ли обнаруженное напряжение источника питания привода при заранее определенном времени ниже, чем обнаруженное индуцированное напряжение, соответствующее обнаруженному напряжению источника питания привода; и
- средство управления коррекцией, которое автоматически корректирует данные, относящиеся к скорости, содержащиеся в информации о движении пресс-штемпеля, когда средство определения состояния с низким уровнем напряжения определило, что обнаруженное напряжение источника питания привода ниже, чем обнаруженное индуцированное напряжение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой структурную схему для описания первого варианта воплощения изобретения.
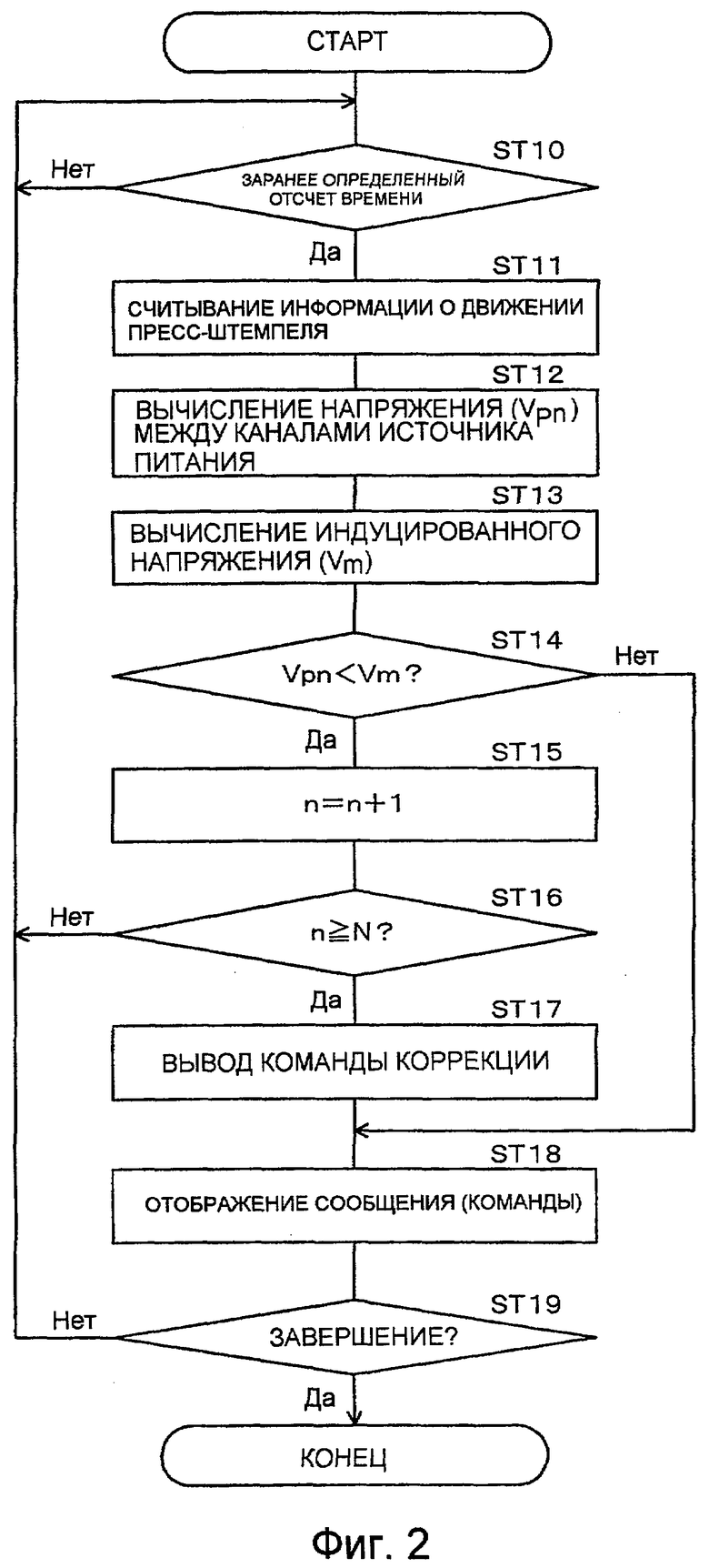
Фиг.2 представляет собой блок-схему для описания операций согласно первому варианту воплощения изобретения.
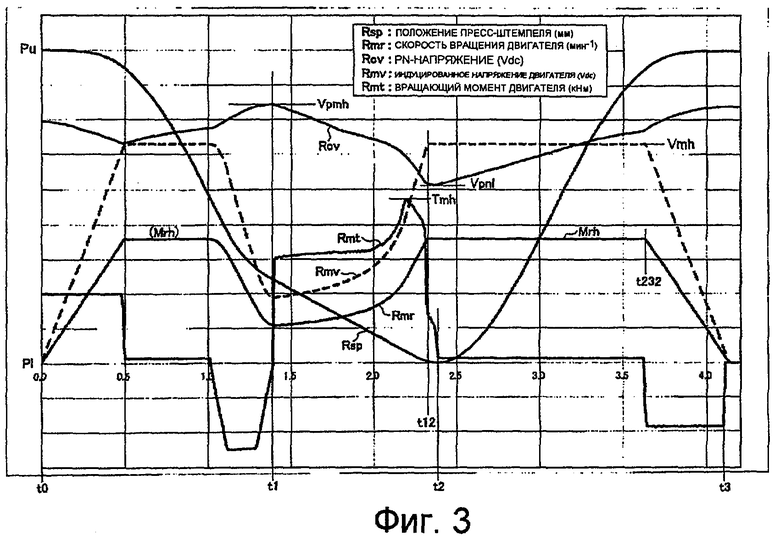
Фиг.3 представляет собой временную диаграмму для описания состояния перед коррекцией согласно первому варианту воплощения изобретения.
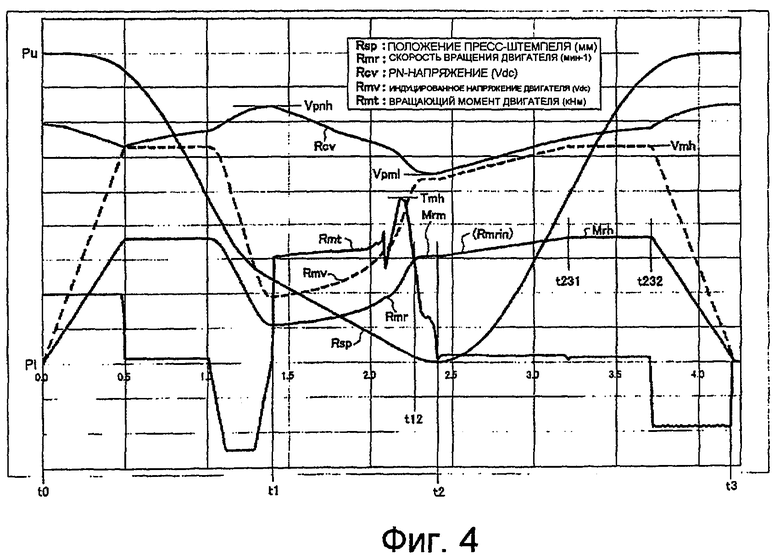
Фиг.4 представляет собой временную диаграмму для описания состояния после коррекции согласно первому варианту воплощения изобретения.
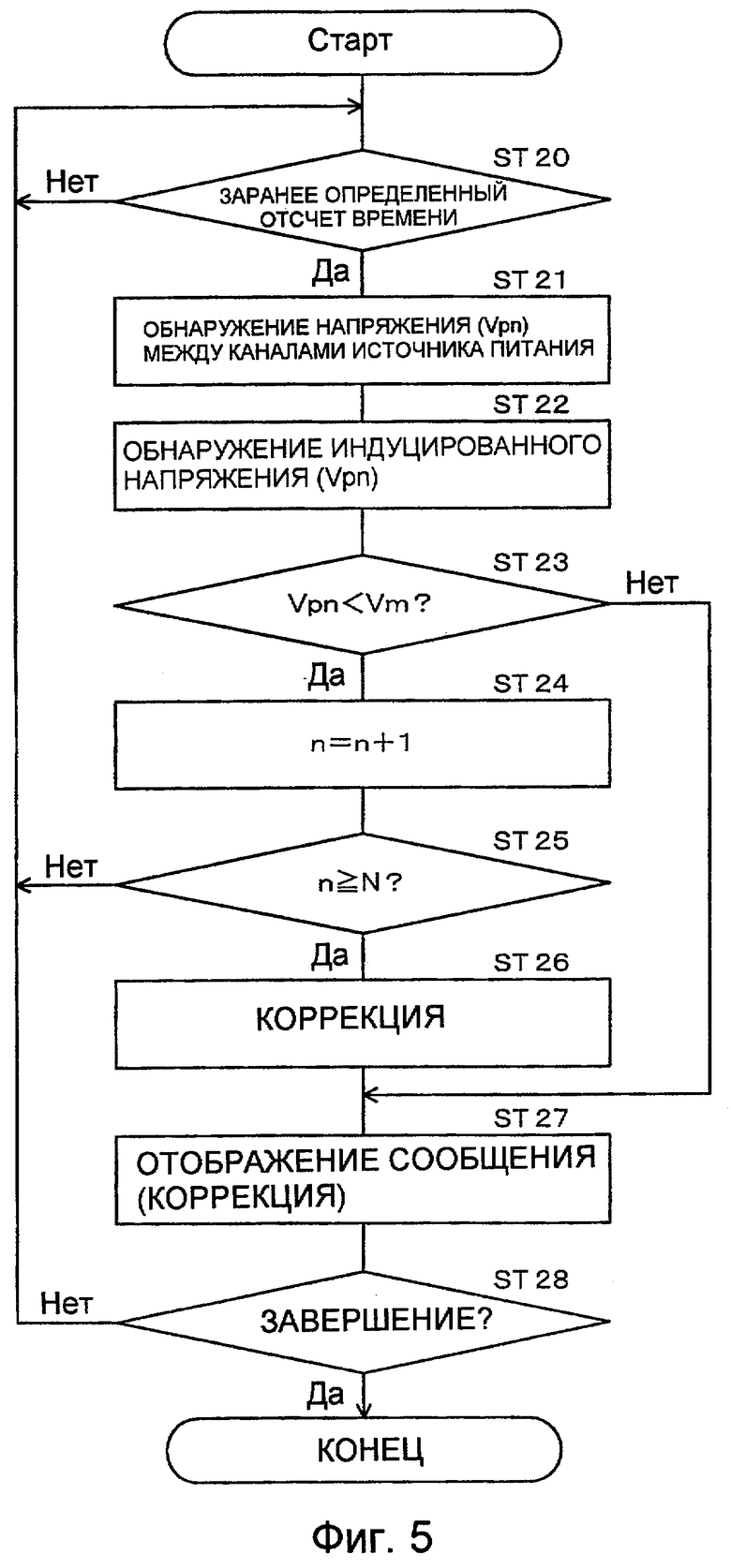
Фиг.5 представляет собой блок-схему для описания операций согласно второму варианту воплощения изобретения.
Фиг.6 представляет собой временную диаграмму для описания примера, относящегося к уровню техники.
Фиг.7 представляет собой структурную схему для описания устройства источника питания согласно примеру, относящемуся к уровню техники.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТА ВОПЛОЩЕНИЯ
Изобретение может обеспечить сервопресс-машину, которая может делать корректировки для устранения причин нестабильной работы перед работой. Изобретение также может обеспечить сервопресс-машину, которая может автоматически делать корректировки для устранения причин нестабильной работы в ходе работы.
При анализе нестабильной работы, которая возникает на производственном участке, появляется тенденция нестабильной работы, когда желательно достигнуть высококачественной формовки при повышении производительности. Например, операцию начального ускорения, которая повышает скорость пресс-штемпеля (скорость вращения двигателя: траектория Rmr) на начальной стадии в зоне формовки (время t1-t2), показанной на Фиг.6, осуществляют с момента времени, когда воздействия на качество были понижены. Например, допустимая максимальная скорость вращения Mrh может быть достигнута на начальной стадии путем перенесения увеличенного времени старта траектории Rmrin ускорения. Однако, поскольку технические требования и характеристики сервомотора 7, секции 33 регулирования тока, устройства 110 источника питания и конденсатора 130 являются постоянными, возможность отслеживания ограничена. В результате возникает явление реверса напряжения.
В частности, секция 33 регулирования тока подает ток возбуждения для генерирования момента двигателя (траектория Rmt), включая ускоряющий вращающий момент, для сервомотора 7 с момента времени t1. Поскольку мощность привода охватывается мощностью, высвобождающейся из конденсатора (батареи) 130, величина заряда, запасенного в конденсаторе 130, понижается таким образом, что напряжение Vpn источника питания привода плавно понижается. Напряжение Vpn источника питания привода плавно повышается после процесса формовки (момент времени t2) (т.е. крутящий момент формовки устранен). С другой стороны, индуцированное Vm напряжение сервомотора 7 повышается наряду с повышением угловой скорости двигателя (траектория Rmr).
Поэтому устройство источника питания, использующее выходной разряд с конденсатора (батареи) 130, испытывает явление реверса напряжения (Vm>Vpn), при котором индуцированное Vm напряжение превышает напряжение Vpn источника питания привода в области, в которой скорость пресс-штемпеля (скорость вращения двигателя) высока.
В частности, напряжение источника питания привода может стать недостаточным (несовпадающим), в зависимости от такой установки движения пресс-штемпеля, как скорость пресс-штемпеля и скорость вращения двигателя. Это порождает нестабильную работу. Однако пользователю сложно исследовать и устранять причину нестабильной работы. Изобретение может устранить нестабильную работу за счет ручной или автоматической корректировки информации о движении пресс-штемпеля.
Согласно одному варианту воплощения изобретения предусмотрена сервопресс-машина, которая включает в себя конденсатор, подключенный между положительным каналом источника питания и отрицательным каналом источника питания, которые соединяют устройство источника питания и секцию управления вращением двигателя, приводит во вращательное движение сервомотор, на основании информации о движении пресс-штемпеля при подаче напряжения источника питания привода, и выполняет операцию штамповки при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля,
причем сервопресс-машина определяет, является ли напряжение источника питания привода между положительным каналом источника питания и отрицательным каналом источника питания ниже, чем индуцированное напряжение сервомотора, и корректирует данные, относящиеся к скорости, на основании информации о движении пресс-штемпеля, когда сервопресс-машина определила, что напряжение источника питания привода ниже, чем индуцированное напряжение.
Согласно данному варианту воплощения причины нестабильной работы можно устранить перед или в ходе работы. Поэтому плавной и стабильной операции прессования можно добиться при повышении производительности.
Согласно одному варианту воплощения предусмотрена сервопресс-машина, которая включает в себя конденсатор, подключенный между положительным каналом источника питания и отрицательным каналом источника питания, которые соединяют устройство источника питания и секцию управления вращением двигателя, приводит во вращательное движение сервомотор, на основании информации о движении пресс-штемпеля при подаче напряжения источника питания привода, и выполняет операцию штамповки, при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля,
причем сервопресс-машина содержит:
- средство вычисления напряжения источника питания привода, которое вычисляет напряжение источника питания привода между положительным каналом источника питания и отрицательным каналом источника питания с использованием информации о движении пресс-штемпеля;
- средство вычисления индуцированного напряжения, которое вычисляет индуцированное напряжение сервомотора с использованием информации о движении пресс-штемпеля;
- средство определения состояния с низким уровнем напряжения, которое определяет, является ли вычисленное напряжение источника питания привода при заранее определенном времени ниже, чем вычисленное индуцированное напряжение, соответствующее напряжению источника питания привода; и
- средство вывода команды коррекции, которое выводит команду коррекции для данных, относящихся к скорости, содержащихся в информации о движении пресс-штемпеля, когда средство определения состояния напряжения с низким уровнем определило, что вычисленное напряжение источника питания привода ниже, чем вычисленное индуцированное напряжение.
Согласно данному варианту воплощения коррекции для устранения причин нестабильной работы можно выполнить перед эксплуатацией. Таким образом, можно получить гладкую и стабильную операцию прессования с простым управлением.
Согласно одному варианту воплощения изобретения предусмотрена сервопресс-машина, которая включает в себя конденсатор, подключенный между положительным каналом источника питания и отрицательным каналом источника питания, которые соединяют устройство источника питания и секцию управления вращением двигателя, приводит во вращательное движение сервомотор, на основании информации о движении пресс-штемпеля при подаче напряжения источника питания привода, и выполняет операцию штамповки при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля,
причем сервопресс-машина содержит:
- средство обнаружения напряжения источника питания привода, которое обнаруживает напряжение источника питания привода между положительным каналом источника питания и отрицательным каналом источника питания;
- средство обнаружения индуцированного напряжения, которое обнаруживает индуцированное напряжение сервомотора;
- средство определения состояния с низким уровнем напряжения, которое определяет, является ли обнаруженное напряжение источника питания привода при заранее определенном времени ниже, чем обнаруженное индуцированное напряжение, соответствующее обнаруженному напряжению источника питания привода; и
- средство управления коррекцией, которое автоматически корректирует данные, относящиеся к скорости, содержащиеся в информации о движении пресс-штемпеля, когда средство определения состояния напряжения с низким уровнем определило, что обнаруженное напряжение источника питания привода ниже, чем обнаруженное индуцированное напряжение.
Согласно данному варианту воплощения коррекции для устранения причин нестабильной работы можно автоматически осуществлять в течение работы. Таким образом, можно получить гладкую и стабильную операцию прессования при дополнительном облегченном управлении.
Вышеописанные сервопресс-машины могут корректировать данные, относящиеся к скорости, путем снижения индуцированного напряжения до значения, более низкого, чем напряжение источника питания привода.
Вышеописанные сервопресс-машины могут корректировать данные, относящиеся к скорости, путем снижения скорости вращения сервомотора.
Вышеописанные сервопресс-машины могут корректировать данные, относящиеся к скорости, путем снижения темпа ускорения скорости вращения сервомотора.
Вышеописанные сервопресс-машины могут корректировать данные, относящиеся к скорости, путем задержки времени начала ускорения скорости вращения сервомотора.
Вышеописанные сервопресс-машины могут корректировать данные, относящиеся к скорости, путем замедления скорости вращения сервомотора.
Первый вариант воплощения
Как показано на Фиг.1-4, сервопресс-машина 1 согласно одному варианту воплощения изобретения включает в себя средство вычисления напряжения источника питания привода, средство вычисления индуцированного напряжения и средство определения состояния с низким уровнем напряжения, в котором использована секция 21 центрального процессора (central processing unit, CPU), энергонезависимая память 22 и память 23, которая может хранить данные, даже когда питание удалено, и средство вывода команды коррекции, в котором использован CPU 21, энергонезависимая память 22, память 23 и секция 26 дисплея, и выводит команду коррекции для данных, относящихся к скорости, содержащихся в информации о движении пресс-штемпеля, когда сервопресс-машина 1 определила, что вычисленное напряжение Vpn источника питания привода ниже, чем вычисленное индуцированное Vm напряжение.
В частности, сервопресс-машина 1 может определить, является ли напряжение Vpn источника питания привода между положительным и отрицательным каналами 120 (P и N) источника питания ниже, чем индуцированное Vm напряжение сервомотора 7, и может корректировать данные, относящиеся к скорости, на основании информации о движении пресс-штемпеля, когда сервопресс-машина 1 определила, что напряжение Vpn источника питания привода ниже, чем индуцированное напряжение Vm. Это дает возможность задать напряжение Vpn источника питания привода, чтобы оно было выше, чем индуцированное Vm напряжение.
Сервопресс-машина 1 включает в себя конденсатор 130, который подключен между положительным каналом P источника питания и отрицательным каналом N источника питания, которые соединяют устройство 110 источника питания и секцию 30 управления вращением двигателя (включающую в себя секцию 33 регулирования тока). Сервопресс-машина 1 приводит во вращательное движение сервомотор 7, на основании информации о движении пресс-штемпеля, при подаче напряжения источника питания привода, и осуществляет операцию пресс-формирования при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля.
На Фиг.1 приводной механизм пресс-штемпеля образован кривошипно-шатунным механизмом 2 (механизмом эксцентрикового привода), включающим в себя кривошипный вал 3 (кривошипный 4 блок). Обратимое вращение (вращение вперед и обратное вращение) кривошипного вала 3 можно регулировать путем регулирования вращения сервомотора 7 переменного тока (alternating-current, AC), который вращательным образом поддерживается и непосредственно подсоединен к подшипнику. Сервомотор 7 может быть сервомотором постоянного тока (direct-current, DC) или реактивным двигателем.
Кривошипный 3 вал и сервомотор 7 могут быть соединены косвенно через зубчатое колесо (редуктор скорости). Путем использования зубчатого колеса (редуктора скорости) можно применять повышенное давление. Механизм эксцентрикового привода может представлять собой конструкцию эксцентрикового вала.
Пресс-штемпель 6 прикрепляют к основному корпусу рамы таким образом, чтобы пресс-штемпель 6 мог скользить вертикально. Пресс-штемпель 6 входит в контакт с балансировочным устройством. Пресс-штемпель 6 можно приводить в действие вертикально через соединительный 5 шток путем вращения кривошипного 3 вала. Верхняя мертвая точка является положением Pu, показанным на Фиг.3 и 4, а нижняя мертвая точка является положением Pl. Пресс-форма включает в себя верхнюю пресс-форму на стороне пресс-штемпеля 6 и нижнюю пресс-форму на стороне подштамповой плиты (не показана).
Кодирующее 8 устройство, подключенное к сервомотору 7 переменного тока, включает в себя множество оптических прорезей и оптический детектор в принципе и выводит угол поворота (угол поворота кривошипа) тета сервомотора 7 (кривошипный вал 3). В данном варианте воплощения кодирующее 8 устройство включает в себя преобразователь (не показан), который преобразует угол поворота тета (импульсный сигнал) в вертикальное положение (импульсный сигнал) пресс-штемпеля 6 и выводит вертикальное положение пресс-штемпеля 6.
Детекторы 9 и 140 напряжения, показанные на Фиг.1, будут описаны позже со ссылкой на второй вариант воплощения.
На Фиг.1 показана полная конфигурация сервопресс-машины 1, причем панель 20 управления прессом включает в себя CPU 21, энергонезависимую память 22 (например, постоянное запоминающее устройство ROM и накопитель на жестком диске HDD), память 23 (например, флэш оперативное запоминающее устройство, RAM), которая может сохранять данные, даже если она была отключена, сенсорную панель 24, которая функционирует как обрабатывающая 25 секция, секцию 26 дисплея и, например, интерфейсы 27 и 28. Вращение сервомотора 7 можно регулировать путем генерирования сигнала команды движения Smtn на основании программы контроля операции прессования, хранящейся в памяти 22, и информации MTN (сеть передачи сообщений) о движении пресс-штемпеля и путем вывода сигнала команды движения на секцию 30 управления вращением двигателя, вследствие чего пресс-штемпель 6 можно перемещать в направлении вверх/вниз. На Фиг.1 элементы, относящиеся к устройству передачи обрабатываемой детали и т.п., опущены.
Как показано на Фиг.3 и 4, информация MTN о движении пресс-штемпеля (P, t) представляет собой информацию о положении пресс-штемпеля (траектория Rsp), которая указывает на время t и положение P пресс-штемпеля 6. Информацию MTN о движении пресс-штемпеля можно задавать и вводить с использованием обрабатывающей секции 25 (например, средства 25Pt, установочно вводящего информацию о положении пресс-штемпеля), показанной на Фиг.1. Информация MTN о движении пресс-штемпеля, которая была задана, хранится в области 22mtn информации о движении энергонезависимой 22 памяти, вследствие чего информацию MTN о движении пресс-штемпеля можно избирательно использовать в дальнейшем. Информацию MTN о движении штемпеля, выбранную до операции прессования, загружают в память 23.
В данном варианте воплощения информация MTN о движении пресс-штемпеля (P, t) хранит в себе информацию о скорости вращения двигателя (траектория Rmr), показанной на Фиг.3 и 4, которая преобразуется и генерируется, на основании информации о положении пресс-штемпеля (траектория Rsp). Информацию о скорости вращения двигателя (траектория Rmr) вычисляют исходя из информации о скорости пресс-штемпеля и характеристик кривошипно-шатунного механизма 2. Данные, относящиеся к скорости, содержащиеся в информации MTN о движении пресс-штемпеля (данных о формовке), относятся к данным о скорости пресс-штемпеля и данным о скорости вращения двигателя.
Сигнал Smtn команды движения, показанный на Фиг.1, генерируется, на основании данных о скорости вращения двигателя или информации о скорости вращения двигателя, и выводится, например, в виде импульсного сигнала. Секция команды движения, в которой использован CPU 21, энергонезависимая память 22 и память 23, которая может хранить данные, даже когда питание отключено, имеет структуру импульсного выходного сигнала о положении.
В частности, когда была выбрана желаемая информация MTN о движении пресс-штемпеля (траектория Rsp) или задана с использованием обрабатывающей секции 25, секция команды движения выводит сигнал Smtn команды движения к секции 30 управления вращением двигателя, на основании программы управления операцией прессования (программа управления генерирования/вывода сигнала, команды движения). Например, когда скорость вращения двигателя составляет 120 оборотов в минуту, количество импульсов, исходящих из кодирующего устройства 8 за оборот (360 градусов), составляет 1000000, а выходная длительность цикла составляет 5 мс, количество выходных импульсов за цикл (5 мс) составляет 10000 (=(1000000×120)/(60×0,005)). В частности, скорость вращения двигателя можно изменять путем регулирования или изменения количества импульсов за время цикла.
В секции 30 управления вращением двигателя, которая принимала сигнал Smtn команды движения, компаратор 31 положения сравнивает сигнал команды движения Smtn (заданное значение) с действительным сигналом положения пресс-штемпеля (сигналом f обратной связи), обнаруженным кодирующим 8 устройством для генерирования и вывода сигнала отклонения положения.
Секция управления положением, которая образует часть секции 32 управления положением/скоростью, суммирует входной сигнал отклонения положения и умножает суммированный сигнал отклонения положения на коэффициент усиления контура позиционирования, для генерирования и вывода сигнала скорости. Компаратор скорости сравнивает сигнал скорости с выходным сигналом скорости (составляющая скорости сигнала f), выходящим из кодирующего 8 устройства (детектор скорости), для генерирования и вывода сигнала отклонения скорости. Секция регулирования скорости, которая образует часть секции 32 управления положением/скоростью, умножает входной сигнал отклонения скорости на коэффициент усиления контура позиционирования для генерирования сигнала команды тока и выводит сигнал команды тока на секцию 33 регулирования тока (усилитель). Сигнал команды тока, по существу, является сигналом момента двигателя.
Секция 33 регулирования тока генерирует сигнал выходного фазного тока с использованием напряжения источника питания привода (напряжение Vpn), подаваемого от устройства 110 источника питания и конденсатора 130. Секция 33 регулирования тока также генерирует и выводит сигнал отклонения тока. Сигнал PWM (широтно-импульсная модуляция, ШИМ) генерируется из каждого сигнала отклонения фазного тока за счет ШИМ управления и модуляции ширины импульса. Управление переключением (ВКЛ/ВЫКЛ) осуществляют с помощью каждого ШИМ сигнала для вывода фазных токов U, V и W двигателя привода. Таким образом, можно управлять вращением сервомотора 7.
На Фиг.1 устройство 110 источника питания включает в себя схему выпрямителя, коммутационную схему и т.п. (способ преобразователя). Устройство 110 источника питания генерирует напряжение источника питания постоянного тока привода на основании напряжения источника питания переменного тока, принимаемого из системы 100 источника питания. Сглаживающий конденсатор 130 подключен между положительным и отрицательным каналами 120 (P и N) источника питания, которые соединяют устройство 110 источника питания и секцию 33 регулирования тока с использованием способа инвертора. Конденсатор 130 образован с использованием электролитического конденсатора. Следует отметить, что конденсатор 130 не ограничен этим. В ходе формовки большое количество мощности создания вращающего момента перекрывается мощностью, высвобождающейся из конденсатора 130, обладающего согласующей функцией.
Средство вычисления напряжения источника питания привода образовано памятью 22, в которой хранится программа управления вычислением напряжения источника питания привода, памятью 23, в которую загружены данные, и CPU 21, который выполняет программу управления вычислением напряжения источника питания привода. Средство вычисления напряжения источника питания привода вычисляет напряжение Vpn источника питания привода между положительным P каналом источника питания и отрицательным N каналом источника питания с использованием информации MTN о движении пресс-штемпеля (траектория Rsp) (ST12 на Фиг.2). Вычисленное напряжение Vpn источника питания привода хранится в средстве 23Vpn хранения данных напряжения источника питания привода, показанном на Фиг.1 в виде данных напряжения источника питания привода, которые соответствуют времени t.
Напряжение Vpn источника питания привода является напряжением на конденсаторе 130. Напряжение Vpn источника питания привода понижается при высвобождении тока питания, который соответствует вращающему моменту T, создаваемому сервомотором 7. Вращающий момент T, приложенный к сервомотору 7, является суммой вращающего момента Tj, требуемого для вращения инертного тела J, непосредственно соединенного с валом сервомотора, вращающего момента Tm, который ускоряет нагрузку (например, пресс-штемпель), и вращающего момента Tg, который уравновешивает силу тяжести G, приложенную к нагрузке. В частности, напряжение Vpn источника питания привода можно вычислить из вращающего момента T, в соответствии с информацией MTN о движении пресс-штемпеля (траектория Rsp), и константы (например, емкости конденсатора 130), с использованием времени t в качестве общего члена.
Средство вычисления индуцированного напряжения выполнено таким же образом, что и средство вычисления напряжения источника питания привода. Средство вычисления индуцированного напряжения вычисляет индуцированное напряжение сервомотора 7 с использованием информации MTN о движении пресс-штемпеля (например, о скорости двигателя) (ST13). Вычисленное индуцированное напряжение Vm хранится в средстве 23Vm хранения данных об индуцированном напряжении в виде данных об индуцированном напряжении, соответствующих моменту времени t. Момент времени t наступает при заранее определенном времени (времени выборки). Момент времени t является тем же моментом времени, что и при вычислении напряжения Vpn источника питания привода.
Индуцированное Vm напряжение является величиной, пропорциональной скорости вращения сервомотора 7. Индуцированное Vm напряжение можно вычислять с использованием скорости пресс-штемпеля (т.е. скорости вращения двигателя (траектория Rmr)), на основании информации MTN о движении пресс-штемпеля и постоянной двигателя (например, постоянной индуцированного напряжения и постоянной вращающего момента).
В данном варианте воплощения средство 23Pt хранения данных о формовке (определенная область памяти 23) может быть предусмотрено с точки зрения удобства обращения и высокой скорости процесса. Информация MTN о движении пресс-штемпеля, хранящаяся в области 22mtn информации о движении, может храниться непосредственно в средстве 23Pt хранения данных о формовке, или же данные о формовке, полученные при преобразовании информации MTN о движении пресс-штемпеля, можно хранить (или копировать) в средстве 23Pt хранения данных о формовке. Средство хранения данных о формовке также может служить в качестве области 22mtn информации о движении.
Данные о формовке могут содержать только положение пресс-штемпеля (траектория Rsp). В данном варианте воплощения данные о формовке содержат положение пресс-штемпеля (траектория Rsp) и скорость вращения двигателя (траектория Rmr) в области формовки (время t1-t2) и в следующей области (время t2 - t232), показанной на Фиг.3 и 4. Целью всего этого является увеличение скорости и облегчение процесса коррекции данных, относящихся к скорости. Вращающий момент двигателя (траектория Rmt), напряжение Vpn источника питания привода (траектория Rcv) и индуцированное Vm напряжение (траектория Rmv) также хранятся в средстве хранения данных о формовке.
Данные о формовке можно отображать в секции 26 дисплея в расширенном графическом формате (Фиг.3 и 4). Целью всего этого является облегчение процесса коррекции данных, относящихся к скорости (например, скорости вращения двигателя (траектория Rmr)) (детали будут описаны позже). Скорректированные данные, относящиеся к скорости, отражаются в информации MTN о движении пресс-штемпеля, хранящейся в памяти 22mtn. Последующая операция прессования выполняется на основании информации MTN о движении пресс-штемпеля, в которой отражаются скорректированные данные, относящиеся к скорости.
Средство определения состояния с низким уровнем напряжения определяет, является ли напряжение Vpn источника питания привода, вычисленное при заранее определенном измерении времени (время t), ниже, чем вычисленное индуцированное напряжение Vm (т.е. состояние с низким уровнем напряжения). Средство определения состояния с низким уровнем напряжения приводят в действие на этапе ST14 на Фиг.2. Например, средство определения состояния с низким уровнем напряжения определяет, что состояние в момент времени t2 на Фиг.3 является состоянием с низким уровнем напряжения («ДА» на этапе ST14). Средство определения состояния с низким уровнем напряжения определяет, что состояние в момент времени t2 на Фиг.4 является состоянием с высоким уровнем напряжения («НЕТ» на этапе ST14). Следует отметить, что способ определения этим не ограничен. Например, средство определения состояния с низким уровнем напряжения может определять состояние с низким уровнем напряжения или состояние с высоким уровнем напряжения, когда вычисленная разность (Vcd (=Vm-Vpn)) больше или равна заданной заранее разности (Vsd).
Может оказаться, что невозможно надежно определить на основании ранее определенного результата, что постоянно возникает явление реверса напряжения. В данном варианте воплощения предусмотрено средство проверки реверса напряжения, в котором использован CPU 21, энергонезависимая память 22 и память 23, которая может содержать данные даже при отключенном питании. Средство проверки реверса напряжения подсчитывает количество моментов времени (расчетная величина) n, в которое средство определения состояния с низким уровнем напряжения определило возникновение (ST15) состояния с низким уровнем напряжения, и определяет возникновение явления реверса напряжения, когда расчетная величина n больше или равна числу N, заданному заранее. Это средство также применяют для случая использования способа определения сравнения вышеупомянутой разности.
Средство вывода команды коррекции выводит команду коррекции для данных, относящихся к скорости, на основании информации MTN о движении пресс-штемпеля, когда средство определения состояния с низким уровнем напряжения определило, что вычисленное напряжение Vpn источника питания привода ниже, чем вычисленное индуцированное напряжение Vm («ДА» на этапе ST14). Средство вывода команды коррекции образовано CPU 21, энергонезависимой 22 памятью, памятью 23 и секцией 26 дисплея. Средство вывода команды коррекции приводят в действие на этапах ST17 и ST18 на Фиг.2.
Команды коррекции отображают в секции 26 дисплея. Следует отметить, что команду коррекции можно выводить с использованием звука и т.п.
Данные, относящиеся к скорости, корректируют путем снижения скорости вращения сервомотора 7 таким образом, чтобы индуцированное напряжение Vm двигателя стало ниже, чем, например, напряжение Vpn источника питания привода. Индуцированное напряжение Vm двигателя можно понижать до значения, более низкого, чем напряжение Vpn источника питания привода, путем снижения абсолютного значения угловой скорости двигателя, снижая темп ускорения скорости вращения двигателя или задерживая момент времени начала ускорения скорости вращения двигателя, не изменяя темп ускорения скорости вращения двигателя. Скорость вращения двигателя можно временно замедлять, в зависимости от ситуации. Вышеупомянутый способ увеличивает время, требуемое для повышения скорости вращения двигателя до допустимой максимальной скорости Mrh, показанной на Фиг.3 и 4.
В данном варианте воплощения информацию MTN о движении пресс-штемпеля задают с использованием средства 25Pt ввода/задания перед испытанием или перед операцией прессования. Например, информацию MTN о движении пресс-штемпеля задают в виде положения P штемпеля в каждый момент времени t. Заданную дискретную информацию отображают в секции 26 дисплея в виде непрерывной траектории Rsp (см. Фиг.3). Информация о скорости вращения двигателя (траектория Rmr) и информация о вращающем моменте двигателя (траектория Rmt), соответствующая информации MTN о движении пресс-штемпеля, автоматически генерируются (преобразуются), отображаются и хранятся в памяти 23Pt. Информация о скорости вращения двигателя и информация о вращающем моменте двигателя также хранятся в памяти 22mtn. Информацию MTN о движении пресс-штемпеля аналогично отображают при выборе информации MTN о движении пресс-штемпеля, хранящейся в памяти 22mtn.
На Фиг.3 информация MTN о движении пресс-штемпеля, созданная в данный момент, выполнена таким образом, что пресс-штемпель 6 перемещается вниз от верхней мертвой точки Pu (момент времени t0) с высокой скоростью, которая снижается до такой скорости, чтобы в момент времени t1 (примерно через 1,4 сек) происходило мягкое касание, и достигает нижней мертвой точки Pl в момент времени t2 (примерно через 2,4 сек) после прохождения области формовки (время t1-t2). Затем пресс-штемпель 6 движется вверх с высокой скоростью и достигает верхней мертвой точки Pu в момент времени t3 (примерно через 4,1 сек). Пресс-штемпель 6 движется вверх и вниз за пределы области формовки с допустимой максимальной скоростью Mrh сервомотора 7, за исключением этапа ускорения и этапа замедления.
Для повышения производительности при допущении, что качество формовки является удовлетворительным, скорость пресс-штемпеля (т.е. скорость вращения двигателя) повышают непосредственно после момента времени t1 и достигают допустимой максимальной скорости Mrh непосредственно перед моментом времени t2 (время t12). Время ускорения составляет 0,9 сек от момента времени t1 (примерно 1,4 сек) до момента времени t12 (примерно 2,3 сек). Допустимую максимальную скорость Mrh поддерживают до момента времени t232 (примерно 3,6 сек). В частности, информация MTN о движении пресс-штемпеля была создана (выбрана) таким образом, чтобы производственный цикл (время t0-t3) составлял 4,1 сек.
На данном этапе три порции информации (траектория Rsp, траектория Rmr и траектория Rmt) отображаются в секции 26 дисплея. После выпуска команды диагностики стабильности средство управления считыванием, в котором использован CPU 21, энергонезависимая память 22 и память 23, в которой могут содержаться данные даже при отключенном питании, считывает информацию MTN о движении пресс-штемпеля при заранее определенном отсчете времени («ДА» на этапе ST10 на Фиг.2) (ST11). Средство вычисления напряжения источника питания привода вычисляет напряжение Vpn источника питания привода, а средство вычисления индуцированного напряжения вычисляет индуцированное напряжение Vm (ST12 и ST13).
Вычисленное напряжение Vpn источника питания привода и вычисленное индуцированное напряжение Vm отображаются в сравнительной форме (траектория Rcv и траектория Rmv, показанные на Фиг.3). На Фиг.3 явление реверса напряжения, при котором индуцированное напряжение Vm больше или равно напряжению Vpn источника питания привода, возникает с момента времени непосредственно перед моментом времени t12. Однако явление реверса напряжения может быть не распознано при определении невооруженным глазом.
Поэтому средство определения состояния с низким уровнем напряжения определяет, что напряжение Vpn источника питания привода в момент времени Ti, содержащееся в данных о напряжении источника питания привода (траектория Rcv), ниже, чем соответствующее индуцированное напряжение Vm, содержащееся в данных об индуцированном напряжении (траектория Rmv) («ДА» на этапе ST14). Затем непосредственно вводится в работу средство проверки реверса напряжения. В частности, подсчет тока определения «ДА» добавляется к расчетной величине n (ST15).
Если расчетная величина n больше или равна N (т.е. состояние с низким уровнем напряжения последовательно возникло N раз) («ДА» на этапе ST16), средство вывода команды коррекции выводит команду коррекции для информации MTN о движении пресс-штемпеля (например, данные, относящиеся к скорости) (ST17 и ST18).
Команду коррекции отображают в секции 26 дисплея для привлечения внимания. Например, отображается сообщение «Снизить скорость пресс-штемпеля для устранения причин нестабильности» (ST18).
После того как средство определения состояния с низким уровнем напряжения определило, что напряжение Vpn источника питания привода выше, чем индуцированное напряжение Vm, содержащееся в данных об индуцированном напряжении (состояние с высоким уровнем напряжения (т.е. нормальное состояние)) («НЕТ» на этапе ST14), отображается, например, сообщение «Стабильное функционирование может быть осуществлено» (ST18).
Программа завершает работу после того, как пользователь издал завершающую команду (завершающую операцию) («ДА» на этапе ST19). Конечную операцию выполняют с использованием клавиши, предусмотренной в обрабатывающей 25 секции. Предложение «программа завершена» означает, что процесс защищен от возврата на этап ST10. Следует отметить, что последний график и сообщение можно постоянно отображать в секции 26 дисплея.
Пользователь, который был уведомлен о команде коррекции через дисплей, определяет проблему и меры по ее решению (т.е. корректировки). На Фиг.3 скорость вращения двигателя (траектория Rmr) начинает повышаться непосредственно после момента времени t1. Темп ускорения повышается по истечении примерно двух секунд, а скорость вращения двигателя достигает допустимой максимальной скорости Mrh в момент времени t12. Поскольку такое быстрое ускорение двигателя повышает ускорение вращающего момента Tm, нагрузка (вращающий момент T двигателя) быстро повышается. Информация о вращающем моменте двигателя обозначена траекторией Rmt, которая имеет максимальный вращающий момент Tmh двигателя в виде вершины, и он быстро понижается с момента времени t12.
Поэтому напряжение Vpn источника питания привода (траектория Rcv) достигает максимального напряжения Vpnh в момент времени t1 (примерно 1,4 сек). Напряжение Vpn источника питания привода понижается (ослабляется) обратно пропорционально вращающему моменту двигателя (траектория Rmt) в области формовки (нагрузки). Напряжение Vpn источника питания привода быстро понижается после повышения темпа ускорения и создания максимального вращающего момента Tmh двигателя. В частности, поскольку количество энергии, подаваемой с конденсатора 130 на сервомотор 7, быстро увеличивается, то напряжение Vpn источника питания привода быстро понижается до минимального напряжения Vpnl.
При плавном росте скорости вращения двигателя (траектория Rmr) непосредственно после момента времени t1, по истечении примерно 2,0 сек, индуцированное напряжение Vm (траектория Rmv) быстро растет пропорционально скорости вращения двигателя и достигает максимального напряжения Vmh в момент времени t12 (примерно 2,3 сек). В частности, явление реверса напряжения (Vpn<Vm) возникает непосредственно перед моментом времени t12.
В частности, при использовании информации MTN о движении пресс-штемпеля (например, траектория Rsp и траектория Rmr), заданной или выбранной таким образом, чтобы производственный цикл составлял 4,1 сек (=t3-t0), время (время t1-t12), требуемое для достижения максимально допустимой скорости Mrh, является слишком коротким.
Поэтому пользователь меняет данные формовки (данные, относящиеся к скорости), хранящиеся в средстве 23Pt (22mtn) хранения данных формовки, путем использования средства 25 Pt ввода/задания информации о положении пресс-штемпеля (средство ввода данных формовки) для устранения причин нестабильности. Пользователь снижает скорость вращения двигателя.
Вышеперечисленное приводят в действие путем изменения данных, относящихся к скорости, содержащихся в информации MTN о движении пресс-штемпеля (например, положения P пресс-штемпеля 6 в зависимости от времени t). Скорректированная скорость вращения двигателя (траектория Rmr) автоматически генерируется (преобразуется) для соответствия скорректированной траектории Rsp. Это также можно применить к вращающему моменту двигателя (траектория Rmt). Результат корректировки отражается в информации MTN о движении пресс-штемпеля, хранимой в памяти 22mtn (т.е. информация MTN о движении пресс-штемпеля частично скорректирована).
Как показано на Фиг.4, скорость вращения двигателя в момент времени t12 (примерно 2,25 сек) снижается до значения (например, Mrm (=Mrh×0,8)), более низкого, чем максимальная допустимая скорость Mrh. Темп ускорения снижается от момента времени t1 (примерно 1,4 сек) до момента времени t2 (примерно 2,4 сек), по сравнению с темпом ускорения, показанном на Фиг.3 (до коррекции). С момента времени t12 до момента времени t2 поддерживают постоянную скорость (нижнюю скорость Mrm). В частности, предусмотрен период постоянной скорости.
Темп ускорения (траектория Rmrin) дополнительно снижается с момента времени t2 до момента времени 231 (примерно 3,2 сек) таким образом, что допустимая максимальная скорость Mrh достигается в момент времени 231. Допустимую максимальную скорость Mrh поддерживают до момента времени t232 (примерно 3,7 сек).
В результате причины нестабильности можно устранить без уменьшения, в значительной мере, целевого производственного цикла (t3=4,1 сек), показанного на Фиг.3. Скорректированный производственный цикл равен t3=4,2 сек (см. Фиг.4). В частности, плавную и стабильную операцию прессования можно обеспечить путем уменьшения производственного цикла примерно на 2%. Этот способ исключает недостатки примера из настоящего уровня техники (т.е. экономическое бремя, требуемое для изменения технических условий и характеристик сервомотора 7, секции 33 регулирования тока, устройства 110 источника питания и конденсатора 130, а также длительный период отключения, требуемый для замены устройств).
Пользователь снова издает команду диагностики стабильности для проверки правильности процесса коррекции. Затем вычисляются напряжение Vpn источника питания привода и индуцированное напряжение Vm (ST12 и ST13), и отображаются траектория Rsp, траектория Rmr и траектория Rmt, на основании частично скорректированной информации MTN о движении пресс-штемпеля. Напряжение Vpn источника питания привода и индуцированное напряжение Vm (траектории Rcv и Rmv) также отображаются в секции 26 дисплея (см. Фиг.4). Это позволяет пользователю визуально проверить, что скорректированное напряжение Vpn источника питания привода не ниже, чем индуцированное напряжение Vm в каждый момент времени t.
Например, когда после процесса первой коррекции в момент времени t остается состояние с низким уровнем напряжения, повторяют второй или последующий процесс коррекции и процесс проверки. Когда желательно увеличить разность между напряжением Vpn источника питания привода и индуцированным напряжением Vm (Vpn-Vm) (операция допуска по напряжению) или желательно уменьшить разность между напряжением Vpn источника питания привода и индуцированным напряжением Vm (операция повышения производительности), процесс коррекции и процесс проверки также можно повторить.
Поэтому явление реверса напряжения можно полностью исключить путем внедрения производственного цикла (время t0-t3), показанного на Фиг.4 (после коррекции), близкого (например, 4,15 сек) к производственному циклу (примерно 4,1 сек), показанному на Фиг.3 (до коррекции).
Согласно настоящему варианту воплощения, поскольку данные, относящиеся к скорости, основанные на информации MTN о движении пресс-штемпеля, корректируются, когда средство определения состояния с низким уровнем напряжения определило, что напряжение Vpn источника питания привода ниже, чем вычисленное индуцированное напряжение Vm, причины нестабильной работы можно устранить перед или в ходе работы. Поэтому гладкую и стабильную операцию прессования можно достичь наряду с повышением производительности.
Более того, поскольку предусмотрены средство вычисления напряжения источника питания привода, средство вычисления индуцированного напряжения, средство определения состояния с низким уровнем напряжения и средство вывода команды коррекции, а команду коррекции для данных, относящихся к скорости (скорости вращения двигателя), содержащихся в информации MTN о движении пресс-штемпеля, можно выводить, когда средство определения состояния с низким уровнем напряжения определило, что вычисленное напряжение Vpn источника питания привода ниже, чем вычисленное индуцированное напряжение Vm, коррекции, которые устраняют причины нестабильной работы, можно выполнять перед работой. Поэтому можно достичь гладкой и стабильной операции прессования с простым обращением. Более того, данные формовки (данные, относящиеся к скорости) можно корректировать легко и надлежащим образом.
Поскольку секция дисплея отображает, что вычисленное напряжение Vpn источника питания привода ниже, чем вычисленное индуцированное напряжение Vm, пользователь, неопытный в электротехнике, может легко определить ситуацию. В результате неопытный пользователь может выполнить операцию прессования точно так же, как и опытный пользователь.
Поскольку предусмотрено средство проверки реверса напряжения и определено, что вычисленное напряжение Vpn источника питания привода ниже, чем вычисленное индуцированное напряжение Vm (т.е. явление реверса напряжения), когда состояние с низким уровнем напряжения происходит последовательно N раз, надежность может быть повышена.
Более того, поскольку график и сообщение отображаются средством вывода команды коррекции, пользователь может быть надежным образом уведомлен о команде коррекции и может своевременно и надлежащим образом определить детали коррекции.
Второй вариант воплощения
Данный вариант воплощения является тем же, что и первый вариант воплощения в том, что касается основной конфигурации и функции (Фиг.1-4). Однако, притом что первый вариант воплощения выполнен таким образом, что коррекции делают на основании работы пользователя, который наблюдает за дисплеем, отображающим команду коррекции, данный вариант воплощения выполнен таким образом, что коррекции делают автоматически в ходе работы.
Описание пунктов, идентичных пунктам из первого варианта воплощения (Фиг.1 и т.п.), упрощено или опущено.
Как показано на Фиг.1, средство обнаружения напряжения источника питания привода образовано из детектора 140 напряжения, подключенного между положительным P каналом источника питания и отрицательным N каналом источника питания (положительный и отрицательный каналы 120 источника питания), и обнаруживает напряжение Vpn источника питания привода, равное напряжению на конденсаторе 130. Напряжение Vpn источника питания привода, обнаруженное (ST21) при заранее определенном отсчете времени («ДА» на этапе ST20 на Фиг.5), хранится в средстве 23Vpn хранения данных напряжения источника питания привода, памяти 23, в виде данных напряжения источника питания привода, которые соответствуют моменту времени t.
Средство обнаружения индуцированного напряжения образовано из детектора 9 напряжения, предусмотренного на канале источника питания, который соединяет секцию 33 регулирования тока и сервомотор 7, и обнаруживает индуцированное напряжение Vm сервомотора 7. Индуцированное напряжение Vm, обнаруженное (ST22) при том же отсчете времени («ДА» на этапе ST20 на Фиг.5), что и напряжение источника питания привода, хранится в средстве 23Vm хранения данных индуцированного напряжения, памяти 23, в виде данных индуцированного напряжения, которое соответствует моменту времени t. Данные напряжения источника питания привода и данные индуцированного напряжения в момент времени t являются общими.
Средство определения состояния с низким уровнем напряжения определяет, является ли напряжение Vpn источника питания привода, обнаруженное при заранее определенном отсчете времени (момент времени t), ниже, чем обнаруженное индуцированное напряжение Vm (т.е. состояние с низким уровнем напряжения), таким же образом, что и в первом варианте воплощения.
Средство управления коррекцией функционирует, когда средство проверки реверса напряжения определило, что состояние с низким уровнем напряжения последовательно возникло в N промежутков времени (т.е. обнаруженное напряжение Vpn источника питания привода ниже, чем обнаруженное индуцированное напряжение Vm (т.е. явление реверса напряжения)) («ДА» на этапе ST25).
В частности, средство управления коррекцией, в котором использован CPU 21, энергонезависимая память 22 и память 23, которая может содержать данные, даже когда питание отключено, корректирует информацию о движении пресс-штемпеля (данные, относящиеся к скорости), когда средство проверки реверса напряжения определило, что обнаруженное напряжение Vpn источника питания привода ниже, чем обнаруженное индуцированное напряжение Vm («ДА» на этапе ST23 на Фиг.4) (ST26).
Средство управления сообщениями дисплея, в котором использован CPU 21, энергонезависимая 22 память и память 23, которая может содержать данные, даже когда питание отключено, отображает пункт автоматической коррекции в секции 26 (ST27) дисплея, показывая пользователю подробности автоматически выполняемой коррекции. Например, отображается сообщение «Движение пресс-штемпеля было частично скорректировано для устранения причин нестабильности».
Средство управления сообщениями дисплея также отображает сообщение «Работа стабильна», когда в результате этапа ST23 получено «НЕТ» (ST27).
Программа завершается, когда пользователь издал завершающую команду (команду завершения) («ДА» на этапе ST28). Программа может исполняться непрерывно в ходе операции прессования.
В данном варианте воплощения, когда средство определения состояния с низким уровнем напряжения определило, что напряжение Vpn источника питания привода, которое было обнаружено (ST21), ниже, чем индуцированное напряжение Vm, которое было обнаружено (ST22) («ДА» на этапе ST23 и «ДА» на этапе ST25), средство управления коррекцией корректирует данные, относящиеся к скорости (состояние с низким уровнем напряжения → состояние с высоким уровнем напряжения) (ST26).
Коррекции являются такими же, что и коррекции, выполняемые вручную пользователем с использованием средства 25Pt ввода данных формовки в первом варианте воплощения, и выполняются автоматически.
Когда состояние с высоким уровнем напряжения не достигается путем одной коррекции, то выполняются дополнительные коррекции. Этот процесс повторяется автоматически.
В частности, информация о движении пресс-штемпеля (траектория Rsp) корректируется таким образом, чтобы разность между напряжением Vpn источника питания привода и индуцированным напряжением Vm (Vpn-Vm) была минимальной, настолько, насколько напряжение Vpn источника питания привода ниже, чем значение индуцированного напряжения Vm. В частности, информация о движении пресс-штемпеля (траектория Rsp) корректируется при минимизации производственного цикла (время t0-t3). Процесс автоматической коррекции обладает преимуществом в том, что повторяющуюся операцию можно выполнять быстро и правильно. Производительность может быть максимизирована без повышения нагрузки на пользователя.
Средство управления сообщениями дисплея отображает (ST27) детали коррекций в секции 26 дисплея в виде сообщения, наряду с графиком, показанным на Фиг.4. Результат коррекции отражается в информации MTN о движении пресс-штемпеля, хранящейся в памяти 22mtn (т.е. информация MTN о движении пресс-штемпеля частично скорректирована).
Согласно данному варианту воплощения, поскольку предусмотрены средство 140 обнаружения напряжения источника питания привода, средство 9 обнаружения индуцированного напряжения, средство определения состояния с низким уровнем напряжения и средство управления коррекцией и информация MTN о движении пресс-штемпеля (например, данные, относящиеся к скорости) может быть скорректирована, когда средство определения состояния с низким уровнем напряжения определило, что напряжение Vpn источника питания привода при заранее определенном отсчете времени ниже, чем соответствующее индуцированное напряжение Vm, причины нестабильной работы могут быть автоматически устранены в ходе работы. Поэтому можно достичь гладкой и стабильной операции прессования при дополнительном облегчении обращения.
Более того, поскольку предусмотрено средство проверки реверса напряжения и явление реверса напряжения обнаруженного напряжения Vpn источника питания привода и обнаруженного индуцированного напряжения Vm прерывается, когда состояние с низким уровнем напряжения последовательно возникло N промежутков времени, можно устранить воздействие шума и т.п. Таким образом, может быть повышена надежность.
Третий вариант воплощения
Данный вариант воплощения является таким же, что и второй вариант воплощения, с точки зрения основной конфигурации и функции (Фиг.1, 3, 4 и 5). Однако, тогда как второй вариант воплощения выполнен таким образом, что так или иначе возникшее состояние с низким уровнем напряжения определяется путем сравнения напряжения источника питания привода, обнаруженного средством обнаружения источника питания привода, и индуцированного напряжения, обнаруженного средством обнаружения индуцированного напряжения, данный вариант воплощения выполнен таким образом, что так или иначе возникшее состояние с низким уровнем напряжения определяется путем сравнения напряжения источника питания привода и индуцированного напряжения, вычисленного таким же образом, что и в первом варианте воплощения, и коррекции выполняют автоматически в ходе работы.
Описание тех же пунктов, что и в первом и во втором вариантах воплощения, опущено. Этапы ST21 и ST22 во втором варианте воплощения (Фиг.5) заменены этапами ST11 и ST12 в первом варианте воплощения (Фиг.2).
Согласно данному варианту воплощения можно достигнуть тех же эффектов, что и во втором варианте воплощения, при снижении нагрузки на оборудование.
Поскольку изобретение может устранять факторы нестабильной работы до или в ходе работы, изобретение обеспечивает гладкую и стабильную операцию прессования и в значительной степени повышает производительность. Поэтому изобретение эффективно для различных типов штамповки.
Хотя выше были подробно описаны только некоторые варианты воплощения данного изобретения, специалисты в данной области техники могут легко понять, что в данных вариантах воплощения возможны многие модификации, без существенного отступления от новых доктрин и преимуществ настоящего изобретения. Следовательно, все такие модификации должны быть включены в объем изобретения.
Изобретения относятся к оборудованию для штамповки. Сервопресс-машина содержит пресс-штемпель, сервомотор, источник питания привода, конденсатор. Конденсатор подключен между положительным и отрицательным каналами источника питания. Упомянутые каналы соединяют источник питания и секцию управления вращением двигателя. Сервомотор приводится во вращательное движение на основании информации о движении пресс-штемпеля при подаче напряжения источника питания для осуществления операции штамповки. Машина выполнена с возможностью определения, является ли напряжение источника питания привода между положительным и отрицательным каналами источника питания ниже, чем индуцированное напряжение сервомотора. В том случае когда упомянутое напряжение источника питания ниже индуцированного напряжения, обеспечивается корректирование относящихся к скорости данных на основании информации о движении пресс-штемпеля. В результате обеспечивается стабильная работа сервопресс-машины. 3 н. и 15 з.п. ф-лы, 7 ил.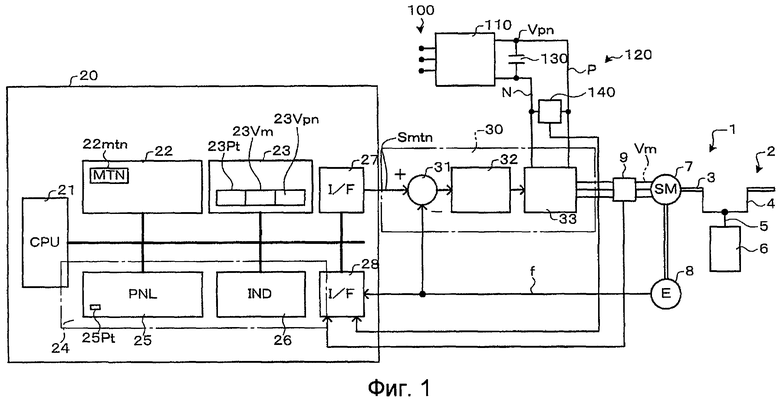
1. Сервопресс-машина, которая содержит конденсатор, подключенный между положительным каналом источника питания и отрицательным каналом источника питания, соединяющими источник питания и секцию управления вращением двигателя, приводит во вращательное движение сервомотор на основании информации о движении пресс-штемпеля при подаче напряжения источника питания привода и осуществляет операцию штамповки при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля, причем сервопресс-машина определяет, является ли напряжение источника питания привода между положительным каналом источника питания и отрицательным каналом источника питания ниже, чем индуцированное напряжение сервомотора, и корректирует относящиеся к скорости данные на основании информации о движении пресс-штемпеля, когда сервопресс-машина определила, что напряжение источника питания привода ниже, чем индуцированное напряжение.
2. Сервопресс-машина по п.1, которая корректирует данные, относящиеся к скорости, путем снижения индуцированного напряжения до значения, которое ниже напряжения источника питания привода.
3. Сервопресс-машина по п.2, которая корректирует данные, относящиеся к скорости, путем снижения скорости вращения сервомотора.
4. Сервопресс-машина по п.2, которая корректирует данные, относящиеся к скорости, путем снижения темпа ускорения скорости вращения сервомотора.
5. Сервопресс-машина по п.2, которая корректирует данные, относящиеся к скорости, путем задержки времени начала ускорения скорости вращения сервомотора.
6. Сервопресс-машина по п.2, которая корректирует данные, относящиеся к скорости, путем замедления скорости вращения сервомотора.
7. Сервопресс-машина, которая содержит конденсатор, подключенный между положительным каналом источника питания и отрицательным каналом источника питания, соединяющими источник питания и секцию управления вращением двигателя, приводит во вращательное движение сервомотор на основании информации о движении пресс-штемпеля при подаче напряжения источника питания привода и осуществляет операцию штамповки при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля, причем сервопресс-машина содержит средство вычисления напряжения источника питания привода, которое вычисляет напряжение источника питания привода между положительным каналом источника питания и отрицательным каналом источника питания привода с использованием информации о движении пресс-штемпеля, средство вычисления индуцированного напряжения, которое вычисляет индуцированное напряжение сервомотора с использованием информации о движении пресс-штемпеля, средство определения состояния с низким уровнем напряжения, которое определяет, является ли вычисленное напряжение источника питания привода при заранее определенном отсчете времени ниже, чем вычисленное индуцированное напряжение, соответствующее напряжению источника питания привода, и средство вывода команды коррекции, которое выводит команду коррекции для данных, относящихся к скорости, содержащихся в информации о движении пресс-штемпеля, когда средство определения состояния с низким уровнем напряжения определило, что вычисленное напряжение источника питания привода ниже, чем вычисленное индуцированное напряжение.
8. Сервопресс-машина по п.7, которая корректирует данные, относящиеся к скорости, путем снижения индуцированного напряжения до значения ниже, чем напряжение источника питания привода.
9. Сервопресс-машина по п.8, которая корректирует данные, относящиеся к скорости, путем снижения скорости вращения сервомотора.
10. Сервопресс-машина по п.8, которая корректирует данные, относящиеся к скорости, путем снижения темпа ускорения скорости вращения сервомотора.
11. Сервопресс-машина по п.8, которая корректирует данные, относящиеся к скорости, путем задержки времени начала ускорения скорости вращения сервомотора.
12. Сервопресс-машина по п.8, которая корректирует данные, относящиеся к скорости, путем замедления скорости вращения сервомотора.
13. Сервопресс-машина, которая содержит конденсатор, подключенный между положительным каналом источника питания и отрицательным каналом источника питания, соединяющими источник питания и секцию управления вращением двигателя, приводит во вращательное движение сервомотор на основании информации о движении пресс-штемпеля при подаче напряжения источника питания привода и осуществляет операцию штамповки при преобразовании вращательного движения сервомотора в вертикальный ход пресс-штемпеля через приводной механизм пресс-штемпеля, причем сервопресс-машина содержит средство обнаружения напряжения источника питания привода, которое обнаруживает напряжение источника питания привода между положительным каналом источника питания и отрицательным каналом источника питания, средство обнаружения индуцированного напряжения, которое обнаруживает индуцированное напряжение сервомотора, средство определения состояния с низким уровнем напряжения, которое определяет, является ли обнаруженное напряжение источника питания привода при заранее определенном отсчете времени ниже, чем обнаруженное индуцированное напряжение, соответствующее обнаруженному напряжению источника питания привода, и средство управления коррекцией, которое автоматически корректирует данные, относящиеся к скорости, содержащиеся в информации о движении пресс-штемпеля, когда средство определения состояния с низким уровнем напряжения определило, что обнаруженное напряжение источника питания привода ниже, чем обнаруженное индуцированное напряжение.
14. Сервопресс-машина по п.13, которая корректирует данные, относящиеся к скорости, путем снижения индуцированного напряжения до значения ниже, чем напряжение источника питания привода.
15. Сервопресс-машина по п.14, которая корректирует данные, относящиеся к скорости, путем снижения скорости вращения сервомотора.
16. Сервопресс-машина по п.14, которая корректирует данные, относящиеся к скорости, путем снижения темпа ускорения скорости вращения сервомотора.
17. Сервопресс-машина по п.14, которая корректирует данные, относящиеся к скорости, путем задержки времени начала ускорения скорости вращения сервомотора.
18. Сервопресс-машина по п.14, которая корректирует данные, относящиеся к скорости, путем замедления скорости вращения сервомотора.
| JP 2004344946 А, 09.12.2004 | |||
| Способ управления приводом ползуна пресса с регулируемым радиусом кривошипного механизма и привод ползуна пресса с регулируемым радиусом кривошипного механизма | 1989 |
|
SU1638028A1 |
| Способ регулирования скорости перемещения вытяжного ползуна кривошипного пресса двойного действия | 1977 |
|
SU620401A1 |
| JP 2003205395 A, 22.07.2003. | |||

