Изобретение относится к области железнодорожного транспорта и может быть использовано на заводах-изготовителях систем и устройств безопасности для проведения тестирования и отладки аппаратно-программных средств устройств безопасности, а также в линейных эксплуатирующих предприятиях отрасли для проведения технических осмотров и ремонта.
Известно устройство проверки Комплексного локомотивного устройства безопасности унифицированного с помощью устройства сервисного обслуживания ПК КЛУБ-У, изложенная в руководстве по эксплуатации 36991-00-00 РЭ п.4.7 «Проверка КЛУБ-У с пультом ПК КЛУБ-У», утв. Главным инженером департамента локомотивного хозяйства ОАО «РЖД» А.В.Петруниным от 22.06.07.
Недостатком данного устройства является то, что в нем не предусмотрен автоматический режим работы и требует постоянного контроля и присутствия обслуживающего персонала, не предусматривает возможность работы с позиционированием в электронной карте, не предусмотрен вывод результатов мониторинга внутренних состояний блоков и модулей устройства безопасности в форме, удобной для контроля со стороны оператора, нет возможности сохранения результатов тестирования.
Наиболее близким техническим решением является «Устройство сервисного обслуживания ПК КЛУБ-У» 36991-950-00, утв. ОАО «Ижевский радиозавод» 20.04.2000 г.
Недостатком этого устройства является отсутствие возможности автоматической работы, не предусмотрена возможность имитировать спутниковый навигационный сигнал в реальном времени с последующим позиционированием на электронной карте системы безопасности, не сохраняются результаты тестирования.
Технический результат предлагаемого изобретения заключается в устранении указанных недостатков, а именно в расширении функциональных возможностей за счет обеспечения работы в автоматическом режиме, имитации спутникового навигационного сигнала в реальном времени с позиционированием на электронной карте, а также сохранения результатов тестирования.
Технический результат достигается тем, что в автономный модуль проверки системы управления и обеспечения безопасности электропоезда, содержащий первый персональный компьютер, устройство бесперебойного питания, сетевой фильтр, выход которого соединен с источником постоянного напряжения, к которому подключено устройство проверки комплексного локомотивного устройства безопасности унифицированного, согласно изобретению введены сетевой концентратор, второй персональный компьютер с программным обеспечением, имитирующим движение по электронной карте с помощью спутниковой навигации, соединенный с ячейкой, имитирующей прием сигналов спутниковой навигации, третий персональный компьютер с программным обеспечением, автоматически управляющий работой предыдущих программ и запоминающий результаты проводимых проверок, четвертый персональный компьютер, регистрирующий и отображающий на мониторе результаты проверки, к сетевому концентратору подключены четыре персональных компьютера, которые через устройства бесперебойного питания подключены к сетевому фильтру, а в память первого персонального компьютера записана программа автоматизации процесса проверки работы системы.
На чертеже представлена схема автономного модуля проверки системы управления и обеспечения безопасности электропоезда.
Автономный модуль проверки системы управления и обеспечения безопасности электропоезда содержит четыре персональных компьютера - ПК 3, 8, 9, 10, четыре устройства бесперебойного питания - УБП 1, 5, 6, 7, сетевой концентратор - 2 (НАВ), сетевой фильтр - 4 (СФ), ячейку - 13, имитирующую прием сигналов спутниковой навигации (ИМ-СНС), источник постоянного напряжения - 11 (ИП), устройство проверки комплексного локомотивного устройства безопасности унифицированного - 12 (ПК-КЛУБ-У), комплексную систему управления и обеспечения безопасности электропоезда - 14.
- Первый персональный компьютер - 10 (Упр. ПК-КЛУБ-У) предназначен для управления внешними сигналами системы управления и обеспечения безопасности и автоматизации процесса проверки работы системы;
- второй персональный компьютер - 8 (Спутник) и ячейка - 13, имитирующая прием сигналов спутниковой навигации (ИМ-СНС), предназначены для имитации движения по электронной карте с помощью спутниковой навигации, осуществления позиционирования локомотива в электронной карте, математического моделирования спутникового навигационного сигнала для системы и передачи в комплексную систему управления и обеспечения безопасности спутниковых навигационных сигналов;
- третий персональный компьютер - 3 (Сервер) предназначен для автоматического управления работой остальных программ, запоминания результатов проводимых проверок и управления моделирующим процессом;
- четвертый персональный компьютер - 9 (CAN-Monitor) предназначен для мониторинга внутренних состояний комплексной системы управления и обеспечения безопасности электропоезда, регистрации и отображения на мониторе результатов проверки;
- устройство проверки комплексного локомотивного устройства безопасности унифицированного - 12 (ПК-КЛУБ-У) предназначено для формирования дискретных выходных сигналов для комплексной системы управления и обеспечения безопасности;
- сетевой концентратор - 2 (НАВ) предназначен для увязки в локальную сеть персональных компьютеров, входящих в состав модуля;
- устройства бесперебойного питания - 1, 5, 6, 7 (УБП) и сетевой фильтр - 4 (устройство подавления сетевых импульсных помех) обеспечивают бесперебойным питанием.
Автономный модуль работает следующим образом.
Принцип работы автономного модуля построен на формировании входных сигналов для комплексной системы управления и обеспечения безопасности электропоезда.
Четыре персональных компьютера - 3, 8, 9, 10 соединены своими входами с выходами сетевого концентратора - 2 (НАВ), очередной выход которого соединен с третьим персональным компьютером - 3 (Сервер) и обмениваются между собой информацией. Третий персональный компьютер - 3 (Сервер) с программным обеспечением, автоматически управляющий работой предыдущих программ и запоминающий результаты проводимых проверок, соединен с выходом устройства бесперебойного питания УБП-1, а также осуществляет выбор одного из двух возможных режимов тестирования, а именно - режима «Проверка отдельных сигналов» либо режима «Поездка».
При выборе первого режима тестирования автономный модуль тестирует отдельные сигналы, такие как код АЛСН, АЛС-ЕН, скорость, давление, положение нуля контроллера, положение ключа ЭПК.
При выборе второго режима тестирования автономный модуль загружает, во время поездки, сценарии.
При включении автономного модуля третий персональный компьютер - 3 через сетевой концентратор - 2 (НАВ) передает имитируемые входные сигналы в первый персональный компьютер - 10 (Упр. ПК-КЛУБ-У), автоматизирующий процесс проверки работы системы, а также через сетевой концентратор - 2 передает данные во второй персональный компьютер - 8 (Спутник) с программным обеспечением, имитирующим движение по электронной карте с помощью спутниковой навигации. Первый персональный компьютер - 10 (Упр. ПК-КЛУБ-У), соединенный с УБП-7, обработав имитируемые сигналы, посылает их в устройство проверки комплексного локомотивного устройства безопасности унифицированного - 12 (ПК-КЛУБ-У), который, в свою очередь, посылает их в комплексную систему управления и обеспечения безопасности электропоезда - 14. Второй персональный компьютер - 8 (Спутник), соединенный с УБП-5, осуществляет позиционирование локомотива в электронной карте, математически моделирует спутниковый навигационный сигнал и посылает его в ячейку - 13, имитирующую прием сигналов спутниковой навигации, которая, в свою очередь, передает его в комплексную систему управления и обеспечения безопасности электропоезда - 14.
Параллельно с этими действиями четвертый персональный компьютер - 9 (CAN-Monitor), соединенный с УБП-6, осуществляет прием сообщений из сети CAN, обеспечивая регистрацию и отображение на мониторе результатов проверки. По запросу третьего персонального компьютера - 3 (Сервер) четвертый персональный компьютер - 9 (CAN-Monitor) передает через сетевой концентратор - 2 (НАВ) результаты тестирования для визуализации на третьем персональном компьютере - 3.
Предложенное техническое решение соответствует критерию «технический уровень», так как оно явным образом не следует из уровня техники.
Сравнение заявляемого технического решения с прототипом позволило установить его соответствие критерию «новизна», так как подобное решение не известно из уровня техники.
Предложенное техническое решение является промышленно применимым, так как существующие технические средства позволяют технически его реализовать.
Таким образом, предложенное техническое решение соответствует критериям патентоспособности изобретения.
Других известных технических решений аналогичного назначения с подобными существенными признаками заявителем не обнаружено.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| Переносное устройство диагностики и формирования сигналов фактической скорости для технического обслуживания локомотивных устройств безопасности | 2024 |
|
RU2832488C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| Устройство для проверки спутниковой антенны комплекса КЛУБ-У | 2024 |
|
RU2828299C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2015 |
|
RU2578638C1 |
Изобретение относится к области железнодорожного транспорта и может быть использовано для проведения тестирования средств устройств безопасности. Модуль содержит компьютер - CAN-монитор, устройство проверки комплексного локомотивного устройства безопасности унифицированного, компьютер-спутник, ячейку, имитирующую прием сигналов спутниковой навигации и обеспечивающую передачу в комплексную систему управления и обеспечения безопасности спутниковых сигналов, компьютер управления, компьютер-сервер, сетевой концентратор, устройства бесперебойного питания и сетевой фильтр. Технический результат заключается в расширении функциональных возможностей. 1 ил.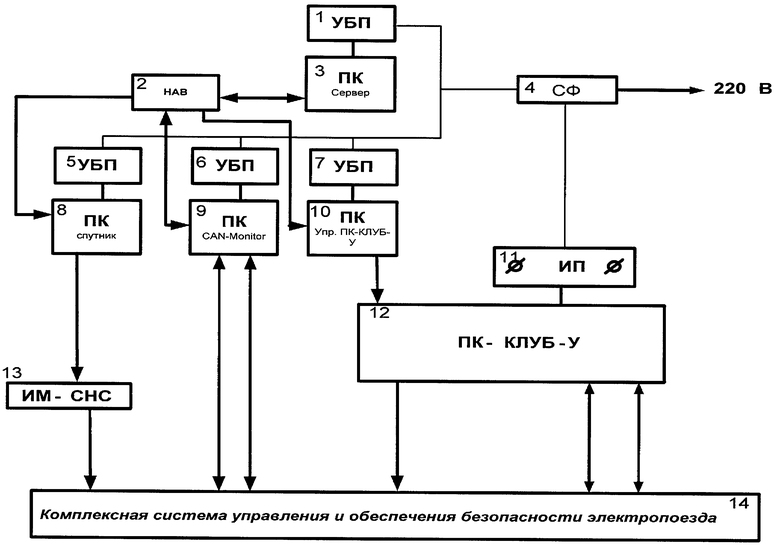
Автономный модуль проверки комплексной системы управления и обеспечения безопасности, содержащий компьютер - CAN - монитор, обеспечивающий мониторинг внутренних состояний системы и вывод результатов мониторинга на экран, устройство проверки комплексного локомотивного устройства безопасности унифицированного, предназначенного для формирования дискретных выходных сигналов для комплексной системы управления и обеспечения безопасности, компьютер-спутник, обеспечивающий математическое моделирование спутникового навигационного сигнала для системы управления и обеспечения безопасности, а также имитирующий движение по электронной карте с помощью спутниковой навигации, ячейку, имитирующую прием сигналов спутниковой навигации и обеспечивающую передачу в комплексную систему управления и обеспечения безопасности спутниковых сигналов, компьютер управления, предназначенный для моделирования и управления внешними сигналами системы управления и обеспечения безопасности, компьютер-сервер, управляющий результатами тестирования системы управления и обеспечения безопасности, сетевой концентратор, объединяющий ресурсы всех четырех компьютеров, устройства бесперебойного питания и сетевой фильтр.
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| DE 19513244 A1, 10.10.1996 | |||
| DE 4244624 A1, 30.06.1994 | |||
| US 6487478 В1, 26.11.2002. | |||

