Изобретение относится к средствам и методам определения местоположения объектов, перемещающихся в одном направлении последовательно друг за другом либо параллельно друг другу, и может использоваться для определения местоположения транспортных средств, в частности автотранспорта и железнодорожных вагонов на сортировочных путях.
Известны различные способы определения местоположения перемещающихся объектов, основанные на использовании разнообразных средств и методов измерений.
Так, например, в авторском свидетельстве СССР №172352 (опубликовано 10.08.1965, МПК B61L) описаны система и способ автоматического контроля следования отцепов (железнодорожных вагонов), скатывающихся с сортировочной горки на путях подгорочного парка. Система контроля местоположения отцепов содержит блок фиксации информации о местоположении отцепа, запоминающий блок, следящие релейные блоки, блок сравнения и блок отображения информации.
Следящие релейные блоки включают в свой состав схему фиксации и передачи информации о вагонах, а также средства измерения: контрольные реле вагонов и контактные путевые реле, расположенные вдоль активной зоны движения вагонов (так называемые напольные средства измерений). При использовании известной системы автоматического контроля следования вагонов повышается точность получаемой информации о месте нахождения вагонов. Кроме того, применение данной системы позволяет сократить численность обслуживающего персонала.
Однако использование в качестве средств измерения релейных устройств, устанавливаемых вдоль железнодорожного полотна, существенно усложняет систему автоматического контроля положения транспортных средств, а также эксплуатацию такой системы и практически исключает возможность оперативного изменения границ зоны контроля местоположения объектов.
Известны также и другие методы определения местоположения перемещающихся объектов с помощью путевых датчиков, размещенных вдоль направления движения объекта.
В частности, в патенте РФ №2105687 (опубликован 27.02.1998, МПК-6: B61L 17/00) раскрыт метод контроля заполнения путей подгорочного парка железнодорожных вагонов. В качестве путевых (напольных) средств измерений применяются группы индуктивных датчиков, установленных на каждом контрольном участке железнодорожного пути. Чувствительным элементом путевых датчиков являются перекрещивающиеся индуктивные шлейфы, образующие индуктивность генератора переменного тока в границах каждого контрольного участка пути.
Повышение точности непрерывного определения местоположения отцепа на подгорочном пути достигается за счет одновременного опроса путевых датчиков и автоматической обработки получаемой информации.
Для определения местоположения транспортного средства, перемещающегося вдоль определенного направления движения, могут использоваться и другие напольные средства контроля. Такие средства могут быть выполнены в виде путевых датчиков на основе постоянных магнитов. В этом случае магнитные датчики, сигнализирующие об изменении индукции магнитного поля, устанавливаются на перемещающемся объекте (см., например, патентную заявку США №2004/0046546, опубликована 11.03.2004, МПК-7: G01Р 3/66).
Определение местоположения транспортного средства с помощью данной системы производится посредством фиксирования изменения магнитного поля и передачи информации с транспортного средства на контрольно-диспетчерский пункт.
Более универсальными, с точки зрения расширения диапазона возможностей определения местоположения объекта в пространстве, являются методы, основанные на использовании радиолокационных средств измерения. Данные методы позволяют определять местоположение перемещающихся объектов с меньшими эксплуатационными затратами по сравнению с системами, основанными на применении напольных средств измерения.
Известен способ определения местоположения перемещающихся транспортных средств, заключающийся в измерении временного расхождения между сигналами, принимаемыми наземными радиолокационными устройствами (международная заявка WO 2005/056363, опубликована 23.06.2005, МПК-7: B61L 25/02).
Согласно известному способу радиосигналы излучаются с антенны (или антенн), установленной на контролируемом транспортном средстве. При этом для приема радиосигналов используются два или более приемных радиолокационных устройства, которые пространственно удалены друг от друга и установлены в границах контролируемого участка движения объекта. Используемое для реализации данного метода радиолокационное оборудование базируется на стандарте GSM (Global System for Mobile Communication).
Расчетное местоположение транспортного средства определяется по разности времен получения сигналов удаленными приемными радиолокационными устройствами. Для определения координат объекта используются данные о географическом маршруте движения транспортного средства на контролируемом участке пути. Однако указанный способ позволяет определять местоположение транспортных средств на трассе их движения с невысокой точностью.
Для повышения точности определения координат и скорости движения подвижного объекта в широкой пространственной зоне действия используются спутниковые системы контроля положения объектов. Так, например, в патенте РФ №2115140 (опубликован 10.07.1998, МПК-6: G01S 13/74, B61L 25/02) описан способ контроля положения подвижных объектов, в частности железнодорожных составов.
Известный метод основан на приеме сигналов от навигационных спутников радиолокационными системами перемещающегося объекта и контрольно-корректирующей станции. По полученным сигналам измеряют дальности от соответствующих навигационных спутников до приемных устройств. Полученные параметры передаются с перемещающихся объектов на контрольно-корректирующую станцию, где осуществляется сравнение полученных данных и определение координат и скорости движения подвижных объектов. Реализация данного способа требует разветвленной инфраструктуры и сложного оборудования, включая оборудование, устанавливаемое на подвижном объекте.
Наиболее близким аналогом заявленного изобретения является способ определения местоположения транспортных средств, перемещающихся в одном направлении последовательно друг за другом либо параллельно друг другу, который раскрыт в патенте РФ №2181680 (опубликован 27.04.2002, МПК-7: B61L 25/02).
Известный способ заключается в измерении координат, по меньшей мере, одного перемещающегося объекта вдоль направления его движения с помощью радиолокационного оборудования, часть которого устанавливается на объекте, а другая - на наземной позиции вблизи транспортной магистрали.
Радиолокационная система, предназначенная для определения местоположения транспортного средства, включает в свой состав средства излучения электромагнитных волн (передающие антенны), средства отражения электромагнитных волн, средства приема электромагнитных волн (приемные антенны), средства сравнения параметров излученных и отраженных электромагнитных волн и средства обработки полученных результатов сравнения. Перечисленные устройства при различных вариантах реализации известного метода могут быть установлены либо на транспортном средстве, либо на наземной позиции.
При осуществлении данного способа направление движения транспортного средства должно совпадать с направлением распространения излучаемых электромагнитных волн. Для обеспечения селективного приема отраженного сигнала производится программируемое преобразование частоты отраженного сигнала в исходную частоту с помощью средства отражения электромагнитных волн.
Обработка результатов сравнения излученных и отраженных электромагнитных волн основывается на определении разности фаз между излученной несущей волной и отраженной волной. В результате обработки характеристик сигналов определяется расстояние от транспортного средства до наземных радиолокационных средств приема или излучения электромагнитных волн (в зависимости от варианта реализации способа).
Следует отметить, что известный способ позволяет снизить стоимость контрольно-измерительного оборудования и повысить точность определения местоположения транспортного средства. Указанные результаты достигаются при использовании волноводов для передачи и приема электромагнитных волн.
Вместе с тем данный метод требует размещения части радиолокационного оборудования непосредственно на транспортном средстве, а разрешающая способность метода не позволяет определить местоположение каждого транспортного средства, движущегося в транспортном потоке. В частности, известный способ не позволяет определить местоположение и габариты отдельных вагонов в движущемся железнодорожном составе или отцепов (вагонов), перемещающихся в общем потоке по сортировочным путям подгорочного парка. Кроме того, известный способ практически не применим при воздушном распространении электромагнитных волн в условиях действия многочисленных помех, связанных с движением транспортных потоков.
Изобретение направлено на повышение разрешающей способности метода определения местоположения перемещающихся объектов, в том числе при определении местоположения и габаритов объектов, движущихся в непрерывном транспортном потоке. Другой задачей изобретения является исключение необходимости установки контрольно-измерительного оборудования непосредственно на каждом контролируемом объекте.
Изобретение направлено также на обеспечение универсальности использования контрольно-измерительного оборудования для различных типов контролируемых объектов и возможности оперативного регулирования пространственных границ контролируемой области и мобильности контрольно-измерительного оборудования.
Технические результаты, достигаемые за счет решения перечисленных выше технических задач, заключаются в повышении точности определения местоположения и габаритов контролируемых объектов, перемещающихся в транспортном потоке, упрощении используемого контрольно-измерительного оборудования и расширении диапазона применения способа для различных видов и типов движущихся объектов.
Указанные технические результаты достигаются при осуществлении способа определения местоположения объектов, перемещающихся в одном направлении последовательно друг за другом либо параллельно друг другу. Способ заключается в измерении координат, по крайней мере, одного объекта вдоль направления его движения с помощью радиолокационных средств, в качестве которых используют сверхширокополосный радиолокационный измеритель с регулируемой задержкой включения входной цепи приемника и регулируемым интервалом времени нахождения входной цепи приемника в открытом состоянии.
Радиолокационный измеритель устанавливают со смещением относительно направления движения контролируемого объекта. Передающую и приемную антенну радиолокационного измерителя направляют в сторону ожидаемого местоположения объекта и задают пространственное положение, по меньшей мере, одного строба дальности посредством управления задержкой импульса включения входной цепи приемника и интервалом времени нахождения входной цепи приемника в открытом состоянии в зависимости от расстояния до пространственной области ожидаемого местоположения объекта.
В процессе измерений фиксируют изменение во времени амплитуды доплеровского приращения частоты отраженного от объекта сверхширокополосного сигнала и определяют координаты контролируемого объекта и его размеры вдоль направления движения по изменению амплитуды доплеровского приращения частоты отраженного сигнала в течение интервала времени нахождения входной цепи приемника в открытом состоянии.
Изобретение, охарактеризованное указанной выше совокупностью существенных признаков, основывается на следующих физических принципах.
Большинство традиционных радиотехнических систем работает в узких частотных диапазонах. Для передачи информации обычно используются гармонические (синусоидальные) сигналы. Резонансные свойства электрической колебательной системы (LC контура) позволяют осуществлять частотную селекцию принимаемых сигналов. Поэтому большинство радиотехнических систем имеет полосу частот, намного меньшую их несущей частоты. В тоже время узкая полоса частот ограничивает информативность радиотехнических систем, поскольку количество информации, передаваемой в единицу времени, прямо пропорционально полосе частот.
Наибольшей информативностью сигнала обладают радиолокационные системы со сверхширокой полосой частот сигнала. В соответствии с используемой в настоящее время классификацией к сверхширокополосным радиолокационным системам относят радары с полосой частот сигнала, определяемой согласно следующему условию:
0,25<(fверх-fниж)/(Fверх+Fниж)≤1,
где fверх и Fниж - соответственно верхняя и нижняя граница полосы частот сигнала (см., например, И.Я.Имореев. Сверхширокополосные радары: новые возможности, необычные проблемы, системные особенности. Вестник МГТУ им. Баумана, Серия Приборостроение, Выпуск 4, 1998; И.Я.Имореев. Возможности и особенности сверхширокополосных радиосистем. Прикладная электроника, Харьков, том 1, №2, 2002, стр.122-140).
Применение сверхширокополосных радиолокационных систем позволяет существенно повысить информативность сигнала благодаря увеличению разрешающей способности локатора по дальности за счет уменьшения глубины импульсного объема локатора.
При изменении длительности зондирующего импульса, например, с 1 мкс до 1 нс глубина импульсного объема уменьшается с 300 м до 30 см. Вследствие этого повышается разрешающая способность локатора по всем координатам, уменьшается «мертвая зона» в процессе измерений, повышается устойчивость локатора к воздействию внешних помех. Кроме того, появляется возможность получить радиоизображение контролируемого объекта, поскольку принятый сверхширокополосный сигнал (СШП сигнал) несет информацию не только об объекте в целом, но об отдельных элементах объекта.
Изобретение основывается на указанных свойствах сверхширокополосных радиолокационных систем. Вместе с тем изобретателями было установлено, что при известности маршрута (направления) движения контролируемых объектов в непрерывном транспортном потоке, используя сверхширокополосный радиолокационный измеритель (СШП РИ), можно с высокой точностью определить местоположение отдельного контролируемого объекта и его габариты на заданных расстояниях от фиксированной точки размещения передающей и приемной антенны СШП РИ. В этом случае высокая точность измерений обусловлена повышением разрешающей способностью локатора.
Как было установлено изобретателями, для решения этой задачи требуется применение СШП РИ с регулируемой задержкой включения входной цепи приемника и регулируемым интервалом времени нахождения входной цепи приемника в открытом состоянии.
Кроме того, в отличие от прототипа СШП РИ должен быть смещен относительно направления движения контролируемых объектов с целью распознавания контролируемого объекта в транспортном потоке и определения его габаритов. При этом измерение координат объекта осуществляется в заранее заданной пространственной области ожидаемого местоположения объекта посредством фиксирования пространственного положения строба дальности СШП РИ. Заданное пространственное положение строба дальности обеспечивается посредством регулирования величины задержки импульса включения входной цепи приемника и интервала времени нахождения входной цепи приемника в открытом состоянии.
В зависимости от конкретной решаемой задачи может применяться радиолокационный измеритель с узкой либо широкой диаграммой направленности. В последнем случае диаграмма направленности может охватывать все пространственные области ожидаемого местоположения контролируемых объектов и поэтому отпадает необходимость последующего электронного или механического сканирования всех отдельных пространственных областей ожидаемого местоположения объектов.
По радиоизображению (осциллограмме) объекта, получаемому в течение интервала времени нахождения контролируемого объекта в стробе дальности локатора, определяют изменение во времени амплитуды доплеровского приращения частоты отраженного от контролируемого объекта радиосигнала. Затем по выделенному изменению сигнала производится распознавание контролируемого объекта, определяются его габариты и размеры, рассчитывается расстояние до позиции размещения СШП РИ в соответствии с установленным значением строба дальности.
Изобретение, характеризуемое перечисленными выше операциями, отличающими способ от известного уровня техники, обеспечивает определение местоположения и размеров контролируемого объекта с высокой точностью при минимальных затратах на инфраструктуру контрольно-измерительного комплекса. При этом исключается необходимость размещения каких-либо элементов и узлов системы контроля непосредственно на контролируемом объекте. Вследствие чего упрощается контрольно-измерительное оборудование и обеспечивается возможность определения местоположения различных типов перемещающихся объектов, например автомобилей, железнодорожных вагонов и даже пешеходов.
С целью повышения точности определения местоположения перемещающегося объекта смещение S радиолокационного измерителя относительно направления движения объекта выбирают из условия
0,1L<S≤10L, где L - наибольший размер перемещающегося объекта.
Указанный диапазон значений S характеризуется оптимальной разрешающей способностью СШП РИ, зависящей от удаленности позиции размещения антенн СШП РИ до контролируемой пространственной области местоположения объекта.
Наряду с определением местоположения перемещающегося объекта с помощью заявленного способа может измеряться и скорость движения объекта. Для этого выделяют максимум доплеровского приращения частоты отраженного от объекта сверхширокополосного сигнала и определяют скорость движения объекта по выделенному максимуму доплеровского приращения частоты согласно известной зависимости частоты отраженного от перемещающегося объекта электромагнитного сигнала от скорости движения объекта (эффект Доплера).
Скорость движения объекта может определяться и с помощью других методов. Так, например, с целью определения скорости движения объекта можно измерять координаты местоположения объекта, по меньшей мере, через один интервал времени. Скорость в этом случае вычисляется по измеренным значениям координат местоположения объекта (вдоль направления движения объекта), характеризующим пройденный объектом путь, и фиксированному интервалу времени между измерениями координат объекта.
Далее изобретение поясняется описанием конкретного примера реализации способа, предназначенного для определения местоположения и скорости движения железнодорожных вагонов, перемещающихся по путям сортировочного парка.
На прилагаемых чертежах изображено следующее:
на фиг.1 - принципиальная схема системы, предназначенной для определения местоположения объектов;
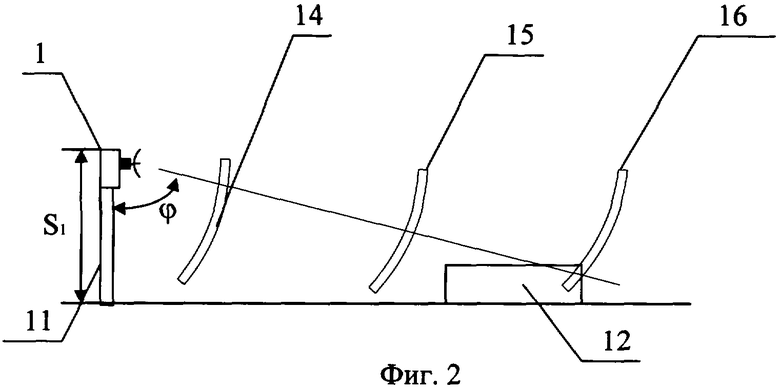
на фиг.2 - схема размещения сверхширокополосного радиолокационного измерителя относительно направления движения железнодорожного вагона (вид сбоку);
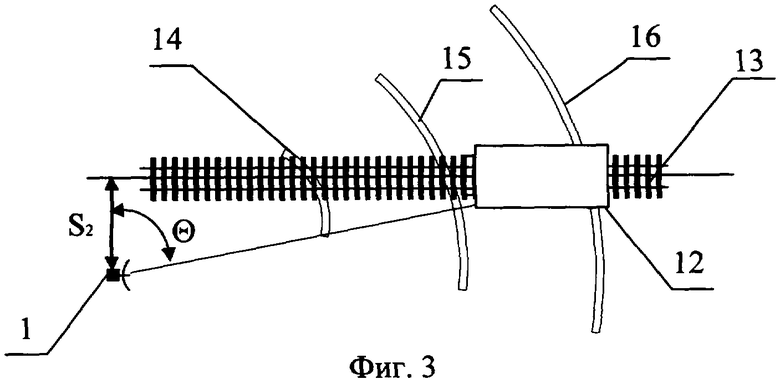
на фиг.3 - схема размещения сверхширокополосного радиолокационного измерителя относительно направления движения железнодорожного вагона (вид сверху);
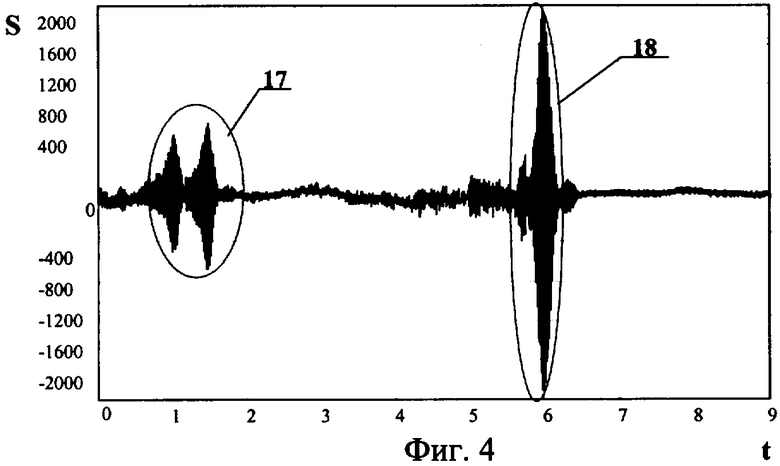
на фиг.4 - осциллограмма доплеровского сигнала, отраженного от движущейся железнодорожной сцепки локомотив-платформа-цистерна;
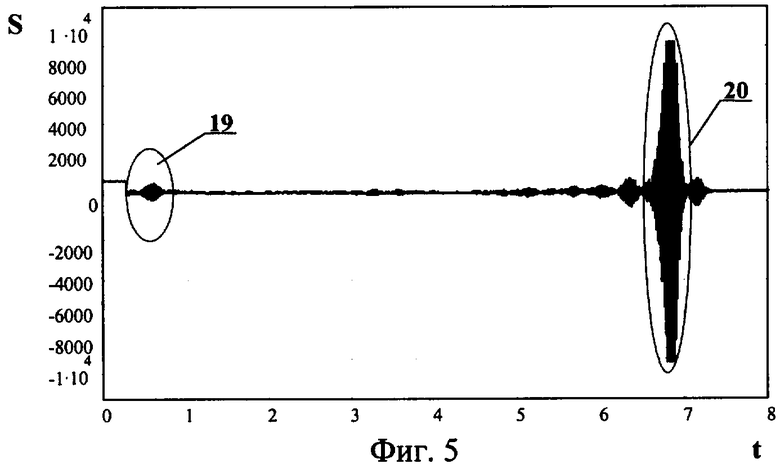
на фиг.5 - осциллограмма доплеровского сигнала, отраженного от движущейся железнодорожной сцепки локомотив-платформа-рефрижератор;
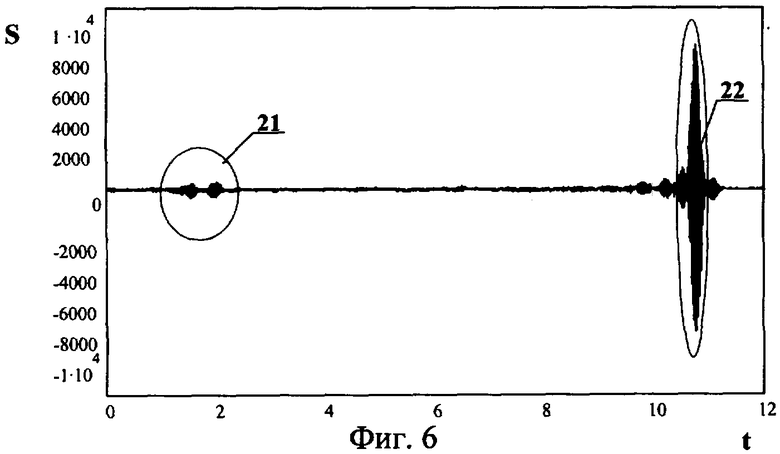
на фиг.6 - осциллограмма доплеровского сигнала, отраженного от движущейся железнодорожной сцепки локомотив-платформа-вагон (цельнометаллический).
Для осуществления способа определения местоположения объектов применяется система, принципиальная схема которой изображена на фиг.1. В состав выносной позиции системы определения местоположения объектов входит СШП РИ 1, блок 2 электропитания, блок 3 связи и синхронизации и блок 4 вычислений, который связан с управляющим вычислительным комплексом 5 автоматизированной системы управления сортировочной станции. Блок 4 вычислений содержит операционную систему, работающую в реальном масштабе времени.
СШП РИ 1 в свою очередь включает в свой состав передающую антенну 6, приемную антенну 7, генератор 8 зондирующего СШП сигнала, приемник 9 отраженного СШП сигнала и блок 10 обработки сигнала и управления.
Средняя мощность СШП излучаемого сигнала составляет 2,5 мВт при пиковой мощности 2,5 Вт. Ширина спектра СШП сигнала: fверх-fниж=300 МГц.
Выносная позиция радиолокационной системы с СШП РИ 1 выполняется в виде мобильного блока и устанавливается на опорах 11 сортировочного парка железнодорожных составов, на путях которого находится контролируемый перемещающийся объект 12 (см. фиг.2 и 3). В рассматриваемом примере реализации изобретения в качестве контролируемого объекта 12 используется сцепка локомотива с железнодорожными вагонами различных типов: с открытой платформой, цистерной, рефрижератором и грузовым цельнометаллическим вагоном.
СШП РИ 1 размещается согласно схеме, изображенной на фиг.2 и 3, со смещением S1 в вертикальном направлении и S2 в горизонтальном направлении относительно направления движения контролируемого объекта 12, т.е. от центра железнодорожных путей 13.
Величины S1 и S2 выбираются в соответствии с условием: 0,1L<S≤10L, где L - наибольший размер перемещающегося объекта. В рассматриваемом примере осуществления изобретения для сцепки локомотива с вагонами L=40 м. Соответственно величины S1=12 м и S2=6 м удовлетворяют условию: 4 м<S≤400 м.
В качестве радиолокационного измерителя используется СШП РИ с регулируемой задержкой включения входной цепи приемника 9 и регулируемым интервалом времени нахождения входной цепи приемника 9 в открытом состоянии. Пространственное положение стробов дальности 14, 15 и 16 радиолокационного измерителя 1, условно показанных на фиг.2 и 3, задают в диапазоне от 20 м до 300 м посредством управления задержкой импульса включения входной цепи приемника 9 и интервалом времени нахождения входной цепи приемника 9 в открытом состоянии.
Дальность действия радиолокационного измерителя составляет 300 м с шагом установки строба дальности 3,75 см. Спектральная плотность мощности в полосе излучаемого сигнала радиолокационного измерителя составляет 8,3 пВт/Гц.
Система определения местоположения отцепов на территории сортировочного парка включает в свой состав комплект СШП РИ 1, установленных на определенном расстоянии друг от друга на опорах 11. Радиолокационные измерители 1 перекрывают своими рабочими зонами по дальности все пространство сортировочного парка и обеспечивают передачу в управляющий вычислительный комплекс 5 реальном масштабе времени информацию о местоположении и скорости движения подвижного состава на территории парка.
Способ определения местоположения объектов, перемещающихся в одном направлении, последовательно друг за другом либо параллельно друг другу, на примере определения местоположения перемещающихся отцепов на территории сортировочного парка осуществляется с помощью описанной выше системы следующим образом.
В начальном состоянии, когда отсутствует движение отцепов на территории сортировочного парка, система определения местоположения объектов находится в «спящем» режиме. При поступлении команды от управляющего вычислительного комплекса 5 система переходит в режим «ожидания». Включается блок электропитания 2, преобразующий электроэнергию переменного тока с частотой 50 Гц и напряжением 220 В в набор питающих напряжений постоянного тока, требующихся для электропитания питания всех компонентов системы, расположенных на выносной позиции.
При роспуске железнодорожных составов управляющий вычислительный комплекс 5 в реальном масштабе времени передает в соответствующие СШП РИ 1, в зоне ответственности которых будет происходить движение отцепов, информацию о маршруте и номере пути движения каждого отцепа. Блок 10 обработки сигнала и управления вырабатывает управляющий сигнал для установки строба дальности излучаемого сигнала в соответствующей области обзора. Для этого устанавливается заданная величина задержки импульса включения входной цепи приемника 9 и интервал времени нахождения входной цепи приемника 9 в открытом состоянии.
Передающую 6 и приемную 7 антенну СШП радиолокационного излучателя 1 предварительно направляют в зону обзора: в сторону ожидаемого местоположения контролируемого объекта 4. При смещениях S1=12 м и S2=6 м СШП РИ 1 относительно железнодорожных путей 13 соответственно в вертикальном и горизонтальном направлении углы между осевыми линиями диаграмм направленности передающей 6 и приемной 7 антенн составляют: ϕ=85° в вертикальной плоскости (см. фиг.2) и θ=87° в горизонтальной плоскости (см. фиг.3).
Пространственное положение стробов дальности 14, 15 и 16 в диапазоне расстояний от СШП РИ 1 от 20 м до 300 м задают посредством выбора задержки импульса включения входной цепи приемника 9 и интервала времени нахождения входной цепи приемника 9 в открытом состоянии в соответствии с заданным расстоянием до области ожидаемого местоположения контролируемого объекта 12, перемещающегося по железнодорожным путям 13. Контролируемый объект 12 представляет собой сцепку локомотива с железнодорожным вагоном, движущуюся по путям сортировочного парка со скоростью от 0,2 до 10 м/с.
Зондирующий СШП радиосигнал формируется генератором 9 по синхроимпульсам приемника 9 с частотой повторения импульсов 400 кГц. Радиосигнал излучается передающей антенной 6, а приемная антенна 7 осуществляет прием отраженного от контролируемого объекта 12 радиосигнала.
Приемник 9 осуществляет временное стробирование, усиление, аналоговую обработку и оцифровку отраженного от контролируемого объекта 12 зондирующего радиосигнала в течение каждого периода измерений. Выполнение данных операций обеспечивается по управляющим сигналам блока 10 обработки сигнала и управления.
Блок 10 осуществляет первичную цифровую обработку сигнала, полученного из приемника 9, и передачу обработанного сигнала в блок 4 вычислений, из которого сигнал передается далее в управляющий вычислительный комплекс 5. Кроме указанных функций, связанных с обработкой сигнала, блок 10 производит управление и регулирование различных параметров компонентов приемника 9 в соответствии с командами управляющего вычислительного комплекса 5. С помощью блока 10 производится управление линиями задержки, счетчиками и аттенюаторами приемника 9.
Блок 3 связи и синхронизации обеспечивает передачу внешних синхроимпульсов с управляющего вычислительного комплекса 5 в блок 10 обработки сигнала и управления с целью согласованной обработки сигналов с нескольких радиолокационных измерителей.
С помощью блока 4 вычислений производится обработка сигнала, полученного из блока 10, в реальном масштабе времени и передача обработанного сигнала в управляющий вычислительный комплекс 5. Блок 4 осуществляет также передачу внешних команд из управляющего вычислительного комплекса 5 в блок 10 обработки сигнала и управления.
В процессе обработки сигнала в блоках 10 и 4 фиксируется изменение во времени амплитуды доплеровского приращения частоты отраженного от объекта 12 СШП сигнала. Координаты объекта 12 и его размеры вдоль направления движения определяются в управляющем вычислительном комплексе 5 по изменению амплитуды доплеровского приращения частоты отраженного СШП сигнала в течение интервала времени нахождения входной цепи приемника 9 в открытом состоянии.
Полученный после обработки сигнал имеет вид осциллограммы амплитуды доплеровского приращения частоты отраженного СШП сигнала в реальном масштабе времени.
Примеры полученных после обработки отраженного радиосигнала осциллограмм представлены на фиг.4, 5 и 6. Данные осциллограммы, получаемые в управляющем вычислительном комплексе 5, характеризуют процесс изменения амплитуды доплеровского приращения частоты отраженного сигнала при прохождении контролируемого объекта через пространственную зону, определяемую стробом дальности, который устанавливается с помощью аппаратуры СШП РИ 1.
В представленных примерах расстояние от выносной позиции до пространственной границы, определяемой стробом дальности СШП РИ 1, составляло 190 м. Скорость движения контролируемых отцепов в области обзора СШП РИ 1 была равна 6 м/с.
На фиг.4, 5 и 6 по оси ординат отложены значения амплитуды S доплеровского приращения частоты отраженного от контролируемого объекта сигнала, а по оси абсцисс - изменение времени t в секундах.
На осциллограмме, изображенной на фиг.4, имеются два характерных участка 17 и 18, на которых имеет место существенное изменение амплитуды СШП сигнала, отраженного от сцепки локомотив-платформа-цистерна. Первый характерный участок 17 соответствует прохождению через пространственную границу, соответствующую установленному стробу дальности, локомотива, а второй участок 18 - прохождению торцевой части цистерны.
На осциллограмме, изображенной на фиг.5, также имеются два характерных участка 19 и 20 изменения амплитуды доплеровского приращения частоты отраженного от контролируемого объекта 12 СШП сигнала. В данном примере в качестве контролируемого объекта использовалась сцепка локомотив-платформа-рефрижератор. Первый характерный участок 19 определяет момент прохождения локомотива через пространственную границу выставленного строба дальности, а второй участок 20 - момент прохождения торцевой части рефрижератора.
В третьем примере, показанном на фиг.6, на осциллограмме выявлены два характерных участка 21 и 22 изменения амплитуды доплеровского приращения частоты отраженного от контролируемого объекта 12 СШП сигнала. В рассматриваемом случае в качестве контролируемого объекта использовалась сцепка локомотив-платформа-вагон грузовой цельнометаллический. Первый характерный участок 21 определяет момент прохождения через пространственную границу, соответствующую установленному стробу дальности, локомотива, а второй участок 22 - момент прохождения через установленную пространственную границу торцевой части цельнометаллического грузового вагона.
Представленные осциллограммы подтверждают возможность определения координат контролируемого объекта вдоль направления его движения на основании установленного строба дальности СШП РИ 1. Кроме того, по полученным осциллограммам можно рассчитать размеры перемещающегося контролируемого объекта.
Скорость контролируемого объекта 12 может быть определена, по меньшей мере, двумя методами. В соответствии с первым методом на полученной осциллограмме выделяют максимум доплеровского приращения частоты отраженного от контролируемого объекта СШП сигнала. После этого скорость движения объекта 12 определяют по выделенному максимуму приращения частоты согласно известной зависимости частоты отраженного от перемещающегося объекта электромагнитного сигнала от скорости движения объекта (эффект Доплера).
Второй метод определения скорости контролируемого объекта 12 заключается в измерении координат местоположения объекта 12, по меньшей мере, через один фиксированный интервал времени. После чего скорость движения объекта рассчитывается по измеренным значениям координат местоположения объекта и интервалу времени между измерениями координат объекта.
При реализации изобретения разрешающая способность по дальности используемого СШП РИ составила 41 см. В соответствии с данным значением было достигнуто существенное повышение разрешающей способности метода определения местоположения контролируемого объекта. При осуществлении способа была исключена необходимость размещения контрольно-измерительного оборудования непосредственно на каждом контролируемом объекте.
После обнаружения контролируемого объекта (отцепа) и определения его координат, размеров и скорости движения система измерения переходит из режима «ожидания» в режим «сопровождения». На основании полученной информации управляющий вычислительный комплекс 5 составляет прогнозируемую трассу движения отцепа по путям сортировочного парка. Согласно определенному направлению движения производится управление стробом дальности радиолокационного измерителя, в зоне действия которого находится контролируемый объект. Посредством регулирования параметров входной цепи приемника 9 устанавливается заданное пространственное положение строба дальности СШП РИ.
На основании сигналов, получаемых в реальном масштабе времени, управляющий вычислительный комплекс 5 постоянно корректирует трассу движения отцепа и устанавливает координаты остановки отцепа на путях сортировочного парка.
В момент перехода отцепа из зоны ответственности одного СШП РИ 1 в зону ответственности следующего измерителя управляющий вычислительный комплекс 5 осуществляет переключение режимов работы соответствующих измерителей. Выбранный СШП РИ переходит в режим «ожидания» и производит обнаружение и сопровождение контролируемого объекта 12.
При получении информации о роспуске очередного отцепа, следующего в зону ответственности соответствующего СШП РИ, управляющий вычислительный комплекс переводит измеритель в режим «ожидания» с минимальной дальностью пространственной границы для контроля появления отцепов в области обзора.
В рассматриваемом примере осуществления изобретения блок 10 обработки сигнала и управления радиолокационного измерителя через каждые пять метров движения отцепов передает в управляющий вычислительный комплекс 5 информацию о местоположении и скорости движения отцепа. Сопровождение отцепа в области обзора производится до перехода контролируемого объекта в зону ответственности следующего измерителя либо до момента остановки отцепа в области обзора.
Точность определения координат места остановки отцепа повышается за счет определения корректирующего коэффициента, рассчитываемого блоком 10 обработки сигнала и управления на основе полученной из управляющего вычислительного комплекса 5 информации о прогнозируемой трассе движения отцепа, его длине и массе.
При интенсивном роспуске отцепов на один путь сортировочного парка возможны затенения впереди идущих отцепов последующими отцепами. В этом случае информация о местоположении и скорости движения отцепа формируется в блоке 10 посредством вторичной обработки имеющихся данных о скорости, длине и массе отцепа с учетом прогнозируемой трассы движения отцепа. После выхода контролируемого отцепа из теневой зоны информация, полученная при вторичной обработке данных об отцепе, корректируется соответствующим образом. Алгоритм корректировки информации о движущемся отцепе позволяет определять координаты места остановки отцепа с заданной точностью.
После остановки отцепа блок 10 формирует информацию о длине свободного пробега до отцепа и о заполнении путей. Полученная информация передается далее в управляющий вычислительный комплекс 5.
Реализация способа определения местоположения объектов в рассматриваемом примере реализации изобретения позволяет контролировать перемещение транспортных средств на путях сортировочного парка при исключении либо существенном сокращении напольных устройств: точечных путевых датчиков, рельсовых цепей, измерителей параметров движения и т.п. При этом все функциональные связи напольных средств измерений с системой автоматизированного управления движением транспортных средств заменяются средствами радиолокационного контроля.
Использование заявленного способа определения местоположения объектов в сортировочных железнодорожных парках позволяет решить следующие задачи, связанные с автоматизацией технологических процессов управления движением транспортных средств:
- идентифицировать транспортные средства, осуществлять мониторинг движения железнодорожных составов, поездных и маневровых локомотивов;
- производить автоматическое расформирование железнодорожного состава на путях сортировочного парка с регулированием скорости скатывания отцепов и контролем роспуска отцепов;
- контролировать накопление вагонов на путях сортировочного парка и маневровое перемещение вагонов;
- формировать железнодорожные составы и контролировать их отправление.
Представленные выше варианты реализации способа определения местоположения объектов демонстрируют возможность достижения технических результатов, связанных с повышением разрешающей способности метода, исключением контрольно-измерительного оборудования, устанавливаемого на объекте, универсальностью использования контрольно-измерительного оборудования и возможностью регулирования пространственных границ контролируемой области. Указанные возможности показаны на примере системы контроля местоположения вагонов и отцепов на путях сортировочного железнодорожного парка. Однако представленные примеры реализации изобретения не исключают возможности его использования в иных транспортных системах и технологических процессах.
Изобретение может применяться в автоматизированных системах управления различных транспортных средств, в том числе в автомобильных и железнодорожных транспортных системах, а также в любых технологических процессах, включающих перемещение потоков контролируемых объектов в одном направлении последовательно друг за другом либо параллельно друг другу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОЛОКАЦИОННОГО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТЕЙ СОРТИРОВОЧНОГО ПАРКА | 2009 |
|
RU2400387C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТЕЙ СОРТИРОВОЧНОГО ПАРКА | 2009 |
|
RU2431865C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ВАГОНОВ В ПАРКЕ СТАНЦИИ | 2014 |
|
RU2578703C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЧЕЛОВЕКА | 2010 |
|
RU2462990C2 |
| ИМПУЛЬСНЫЙ СВЕРХШИРОКОПОЛОСНЫЙ ДАТЧИК | 2008 |
|
RU2369323C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2838248C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЖИВОГО ОРГАНИЗМА | 2012 |
|
RU2533683C2 |
| РАДИОФОТОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2834080C1 |
Изобретение относится к области приборостроения и может использоваться для определения местоположения транспортных средств, в частности железнодорожных вагонов. Технический результат - повышение разрешающей способности. Для достижения данного результата радиолокационный измеритель устанавливают со смещением относительно направления движения объекта. Величину смещения S целесообразно выбирать из условия: 0,1L<S≤10L, где L - наибольший размер перемещающегося объекта. Передающую и приемную антенну радиолокационного измерителя направляют в сторону ожидаемого местоположения объекта и задают пространственное положение, по меньшей мере, одного строба дальности. Вместе с координатами перемещающегося объекта способ позволяет определять и скорость его движения. 4 з.п. ф-лы, 6 ил.
0,1L<S≤10L, где L - наибольший размер перемещающегося объекта.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, ПЕРЕМЕЩАЮЩЕГОСЯ ВДОЛЬ СРЕДСТВА РАСПРОСТРАНЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 1996 |
|
RU2181680C2 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2115140C1 |
| WO 2005056363 А, 23.06.2005 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТЕЙ ПОДГОРОЧНОГО ПАРКА | 1996 |
|
RU2105687C1 |
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ СЛЕДОВАНИЯ ОТЦЕПОВ НА ПУТИ ПОДГОРОЧНОГО ПАРКА | 0 |
|
SU172352A1 |

