Изобретение относится к измерительной технике и может быть использовано в системах автоматики и телемеханики железных дорог (ж/д), а именно в системах автоматизации определения места нахождения вагонов в сортировочных парках станции и определения их скорости при помощи лазерной локации (сканирующих лазерных дальномеров).
Общей проблемой при формировании составов в сортировочных парках станций являются точное определение расстояния от выхода из парковой тормозной позиции до последнего вагона на пути парка формирования составов, также определение скорости движения и соударения вагонов, следующих по путям сортировочного парка и передача этих данных в комплексную систему автоматизированного управления сортировочным процессом (КСАУ СП).
Широко известны и применяемы системы определения местоположения вагонов на сортировочных горках, такие устройства представляют собой рельсовую цепь, датчики связаны с рельсовой линией. Датчики контролируют прохождение тока в рельсе. В разных устройствах контроля заполнения путей наличие тока свидетельствует о свободности или занятости пути. Вместо датчиков могут использоваться путевые реле или катушки индуктивности и трансформаторы. Путевые реле могут регистрировать разбаланс системы. Кроме того, одноименные путевые датчики могут находиться на разных рельсовых путях для непрерывного определения наличия отцепа в каждой точке рельсового пути. Наличие подвижного состава может определяться срывом колебаний на контролируемом участке или с помощью зондирующих импульсов, см. патенты SU 384715 (73 г.), SU 751692 (80 г.), SU 1172800 (85 г.), SU 1470598 (89 г.), SU 1641689 (91 г.), SU2105687 (98 г.), GB 1159018 (69 г.), GB 1335220 (73 г.), GB 2399206 (04 г.), GB 2406948 (05 г.), WO 02053443 (01 г.).
Также известны системы определения длины свободной части пути. Контроль заполнения пути может заключаться в сравнении прямого и отраженного импульсов постоянного тока и определении длины свободной части пути по разнице между ними, а также в сравнении сведений о весе и длине вагонов и нормативной длины пути и определяется длина свободного участка пути для отцепа, см. патенты SU 738926 (80 г.), RU 2025355 (94 г.).
Недостатки таких систем: часто большое количество датчиков, большая протяженность проводных линий связи, часто высокое потребление электроэнергии.
Из известных устройств наиболее близким является устройство радиолокационного контроля заполнения путей сортировочного парка, которое относится к области железнодорожной автоматики и телемеханики, в частности к устройствам радиолокационного сопровождения движущихся единиц (вагонов) по всей территории сортировочного парка от момента въезда до момента вытяжки сформированного состава из парка и определения положения всех транспортных единиц подвижного состава в реальном масштабе времени. Данное устройство содержит постовое оборудование в виде вычислительного комплекса, состоящего из компьютеров, объединенных через Ethernet-коммутатор с системой автоматизированного управления стационарными процессами и с напольным оборудованием, состоящим из подсистемы синхронизации и связи и комплекса выносных позиций, каждая из которых включает компьютер с платой обработки сигналов и радиолокационный измеритель, а подсистема связи и синхронизации состоит из контроллера, Ethernet-коммутатора и модуля генератора синхроимпульсов (патент RU 2431865).
Недостатками устройства является невозможность локации неподвижных целей, большое количество напольных локационных датчиков, малая дальность каждого из локационных датчиков.
Технической задачей изобретения является повышение точности измерения координат вагонов, снижение количества напольных устройств, определение координат всех подвижных единиц в парке станции вне зависимости от параметров их перемещения.
Технический результат достигается за счет применения обзорного лазерного локатора в совокупности с программно-аппаратным комплексом для автоматической обработки результатов измерений.
Для решения поставленной задачи предлагается система определения координат вагонов в парке станции, содержащая постовое оборудование -программно-аппаратный вычислительный комплекс, состоящий из компьютера со специализированным программным обеспечением, соединенное с помощью канала передачи данных стандарта Ethernet с комплексной системой автоматизированного управления сортировочным процессом, напольное оборудование, в состав которого входят сканирующие лазерные дальномерные модули с возможностью кругового вращения и регулировкой скорости вращения, причем каждый лазерный сканирующий модуль содержит приемопередатчик для измерения дальности, блок управления и обработки сигнала, который обеспечивает управление модулем и осуществляет первичную обработку сигнала, электродвигатель для поворота лазерного приемопередатчика со встроенным энкодером для определения относительного угла поворота, при этом лазерный приемопередатчик механически соединен с валом электродвигателя, а блок управления внутренней шиной соединен с электродвигателем, также блок управления внутренней шиной соединен с лазерным приемопередатчиком, при этом каждый локационный модуль посредством канала передачи данных стандарта Ethernet связан с постовым оборудование.
На фиг. 1 представлена структурная электрическая схема системы на которой показаны: 1 и N - сканирующие лазерные модули, 2 - блок управления (БУ), 3 - электродвигатель с энкодером, 4 - лазерный приемопередатчик для измерения дальности, 5 и 5-N - контролируемые вагоны, 6 - программно-аппаратный вычислительный комплекс, 7 - КСАУ СП, источники питания и шины питания условно не показаны.
Система определения координат вагонов в парке станции имеет следующие соединения: каждый сканирующий лазерный модуль 1-N содержит лазерный приемопередатчик для измерения дальности 4, БУ 2, электродвигатель с энкодером 3, причем лазерный приемопередатчик 4 механически соединен с валом электродвигателя 3; блок управления 2 внутренней шиной соединен с электродвигателем 3, имеющим в своем составе энкодер; блок управления 2 внутренней шиной соединен с лазерным приемопередатчиком 4; канал передачи данных стандарта Ethernet между программно-аппаратным вычислительным комплексом 6 и сканирующими лазерными модулями 1 и 1-N, а именно блоками управления 2 лазерных модулей; канал передачи данных стандарта Ethernet между программно-аппаратным вычислительным комплексом 6 и комплексной системой автоматизированного управления сортировочным процессом 7; показаны излученный и отраженный от контролируемых вагонов 5 и 5-N лазерные лучи.
В основе принципа построения предлагаемой системы, определяющей местоположение единиц подвижного состава на путях сортировочного парка, лежит использование сканирующих лазерных дальномерных модулей (далее просто модуль). Для реализации системы предполагается установка этих модулей на территории парков формирования составов сортировочных станций. Количество модулей на путь зависит от длины контролируемого участка и геометрии пути. Установка модулей производится в междупутье.
Модуль предлагаемой системы контроля представляет собой автономный лазерный измеритель расстояния до облучаемой точки на отражающей поверхности. Приемо-передающая лазерная головка этого модуля установлена на вращающемся барабане. В процессе вращения барабана вокруг оси луч лазера «обегает» все точки отражающей поверхности, находящиеся на его пути в этой плоскости. Благодаря этому происходит сканирование профиля в плоскости вращения лазерного приемопередатчика. По времени запаздывания отраженного излучения в модуле производится измерение текущего расстояния до каждой отражающей точки и фиксация угла ее облучения. Цифровые коды положения каждой точки далее передаются на программно-аппаратный вычислительный комплекс на базе персонального компьютера со специализированным программным обеспечением для накопления полученных результатов измерений и формирования локационной картины облучаемой поверхности. Эта картина представляет собой изображение контура сечения контролируемого участка пути плоскостью, параллельной плоскости земли, расположенной на уроне автосцепки, что задано способом и местом установки лазерного модуля. Далее на основе сопоставления исходных данных о расположении железнодорожных путей в парке станции и о размещении лазерного модуля(-ей) выполняется анализ полученной локационной картины программными средствами обработки информации с целью определения координат и параметров движения вагонов, находящихся на путях в парке формирования составов. На основе информации о координатах вагонов в парке станции рассчитывается длина свободного пробега от замедлителя парковой тормозной позиции до последнего вагона, находящего на пути формирования состава. От программно-аппаратного вычислительного комплекса по каналу связи стандарта Ethernet значение рассчитанной длины свободного пробега, номер пучка и номер пути в пучке, время выполнения измерения передаются в комплексную систему автоматизации управления сортировочным процессом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТЕЙ СОРТИРОВОЧНОГО ПАРКА | 2009 |
|
RU2431865C2 |
| СИСТЕМА РАДИОЛОКАЦИОННОГО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТЕЙ СОРТИРОВОЧНОГО ПАРКА | 2009 |
|
RU2400387C1 |
| СИСТЕМА ГОРОЧНОЙ МИКРОПРОЦЕССОРНОЙ ЦЕНТРАЛИЗАЦИИ (ГМЦ) | 2017 |
|
RU2648488C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПОДГОРОЧНЫХ ПУТЕЙ СОРТИРОВОЧНОЙ СТАНЦИИ | 2010 |
|
RU2434774C1 |
| СИСТЕМА ФОРМИРОВАНИЯ МНОГОГРУППНЫХ СОСТАВОВ | 2010 |
|
RU2452643C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПОДГОРОЧНЫХ ПУТЕЙ СОРТИРОВОЧНОЙ СТАНЦИИ | 2008 |
|
RU2392151C2 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ ПРУЖИННО-ГИДРАВЛИЧЕСКОГО ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2013 |
|
RU2550005C1 |
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте. Система содержит программно-аппаратный вычислительный комплекс, состоящий из компьютера со специализированным программным обеспечением, канала передачи данных, комплексной системы управления сортировочным процессом, локационные измерительные модули, каждый из модулей снабжен блоком управления и обработки сигнала. Для определения координат вагонов применены сканирующие лазерные дальномерные модули с возможностью кругового вращения и регулировкой скорости вращения. Лазерный сканирующий модуль содержит приемопередатчик для измерения дальности, электродвигатель для поворота лазерного приемопередатчика со встроенным энкодером, при этом лазерный приемопередатчик механически соединен с валом электродвигателя, а блок управления внутренней шиной соединен с электродвигателем, также блок управления внутренней шиной соединен с лазерным приемопередатчиком. Достигается повышение точности измерения координат вагонов. 1 ил.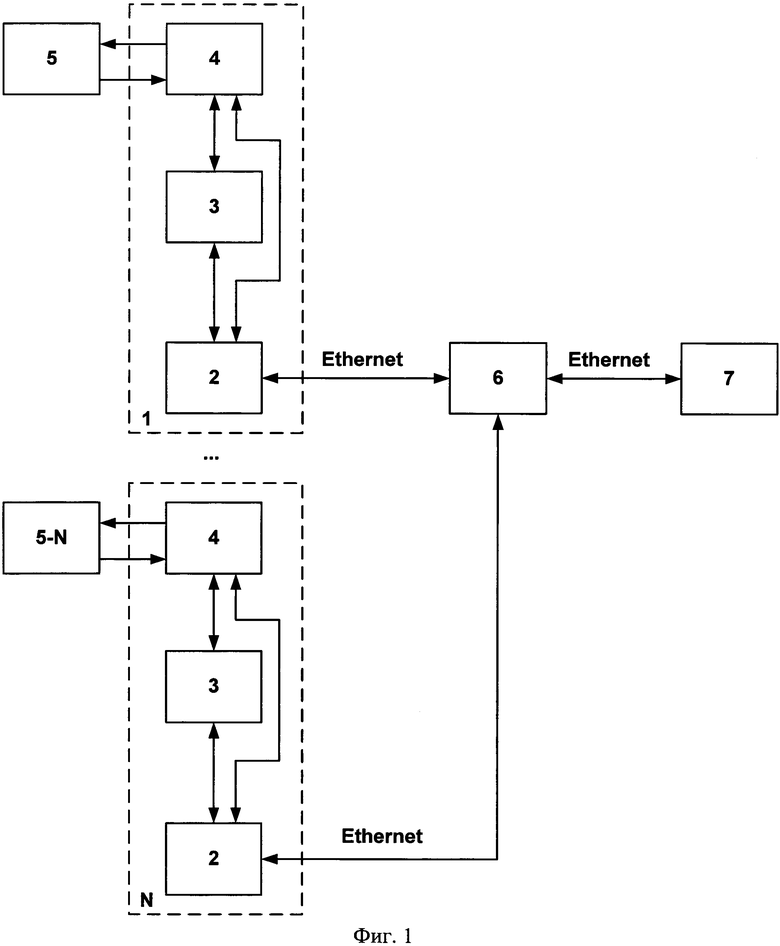
Система для определения координат вагонов в парке станции, содержащая постовое оборудование - программно-аппаратный вычислительный комплекс, состоящий из компьютера со специализированным программным обеспечением, соединенное с помощью канала передачи данных стандарта Ethernet с комплексной системой автоматизированного управления сортировочным процессом, напольное оборудование, в состав которого входят локационные измерительные модули, каждый из модулей снабжен блоком управления и обработки сигнала, который обеспечивает управление модулем и осуществляет первичную обработку сигнала, при этом каждый локационный модуль посредством канала передачи данных стандарта Ethernet через блок управления связан с постовым оборудование, а именно с программно-аппаратным комплексом, отличающаяся тем, что для определения координат вагонов применены сканирующие лазерные дальномерные модули с возможностью кругового вращения и регулировкой скорости вращения, причем каждый лазерный сканирующий модуль содержит приемопередатчик для измерения дальности, электродвигатель для поворота лазерного приемопередатчика со встроенным энкодером для определения относительного угла поворота, при этом лазерный приемопередатчик механически соединен с валом электродвигателя, а блок управления внутренней шиной соединен с электродвигателем, также блок управления внутренней шиной соединен с лазерным приемопередатчиком, причем количество сканирующих лазерных дальномерных модулей определяется количеством и конфигурацией путей парка станции.
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТЕЙ СОРТИРОВОЧНОГО ПАРКА | 2009 |
|
RU2431865C2 |
| СИСТЕМА НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2000 |
|
RU2189065C2 |
| RU 2013123952 A, 27.11.2014 | |||
| US 20070150130 A1, 28.06.2007. | |||

