Изобретение относится к области железнодорожной автоматики, в частности к устройствам радиолокационного сопровождения движущихся единиц (вагонов) по всей территории сортировочного парка от момента въезда до момента вытяжки сформированного состава из парка и определения положения всех транспортных единиц подвижного состава в реальном масштабе времени.
Известно устройство для контроля заполнения путей, построенное на индуктивных датчиках осей, индуктивно-проводных датчиках, КЗП с использованием рельсовых нитей для передачи сигнала. Датчики контролируют прохождение тока в рельсе, который разбит на участки. В различных устройствах КЗП наличие тока свидетельствует о свободности или занятости пути. Вместо датчиков могут использоваться катушки индуктивности и трансформаторы (См. Отчет о выполнении НИОКР «Анализ современного состояния и перспектив развития систем контроля скорости подвижного состава и заполнения путей на сортировочных станциях. ВНИИАС МПС России - 2005 год, утв. Зам. директора ВНИИАС В.И.Талалаевым).
Недостатками данного устройства являются недостаточная точность определения координат отцепов, влияние климатических условий и времени суток и ограниченная зона действия, в которой используется большая кабельная сеть.
Наиболее близким по технической сущности и достигаемому результату является способ и устройство для радиолокационного контроля заполнения путей сортировочного парка, содержащее постовое оборудование в виде вычислительного комплекса, состоящего из компьютеров, объединенных через Ethernet-коммутатор с системой автоматизированного управления станционными процессами и с напольным оборудованием, в состав которого входят радиолокационные измерители (RU 2308750, G05D 1/00, 2007).
Недостатком является низкая эффективность контроля заполнения путей сортировочного парка.
Техническим результатом изобретения является повышение эффективности контроля заполнения путей сортировочного парка.
Указанный технический результат достигается тем, что в устройстве для радиолокационного контроля заполнения путей сортировочного парка, содержащем постовое оборудование в виде вычислительного комплекса, состоящего из компьютеров, объединенных через Ethernet-коммутатор с системой автоматизированного управления станционными процессами и с напольным оборудованием, в состав которого входят радиолокационные измерители, согласно изобретению напольное оборудование состоит из подсистемы синхронизации и связи и комплекса выносных позиций, каждая из которых включает компьютер с платой обработки сигналов и радиолокационный измеритель, а подсистема связи и синхронизации состоит из контроллера, Ethernet-коммутатора и модуля генератора синхроимпульсов.
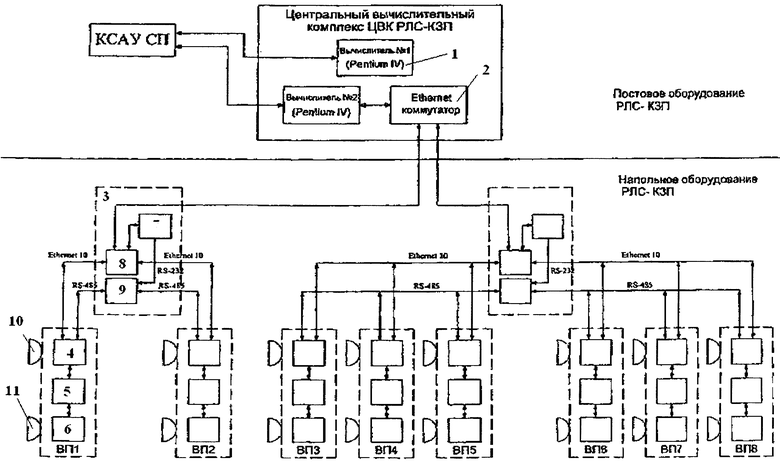
На чертеже представлена функциональная схема устройства радиолокационного контроля заполнения путей сортировочного парка, например, типа РЛС КЗП.
Устройство для радиолокационного контроля заполнения путей сортировочного парка содержит постовое оборудование в виде вычислительного комплекса, состоящего из компьютеров 1, объединенных через Ethernet-коммутатор 2 с системой автоматизированного управления станционными процессами и с напольным оборудованием. Напольное оборудование состоит из подсистемы синхронизации и связи (ПСС) 3 и комплекса выносных позиций, каждая из которых включает компьютер 4 с платой обработки сигналов 5 и радиолокационный измеритель 6. Подсистема связи и синхронизации 3 состоит из контроллера 7, Ethernet-коммутатора 8 и модуля генератора синхроимпульсов 9.
Аппаратура РЛС КЗП разделяется на оборудование, располагаемое на посту, и оборудование, устанавливаемое в поле.
Напольное оборудование в свой состав включает подсистему синхронизации и связи (ПСС) 4 и комплекс выносных позиций (ВП).
В состав ВП входит вынесенная приемная и передающая антенны 10 и 11.
Устройство для радиолокационного контроля заполнения путей сортировочного парка работает следующим образом.
Устройство радиолокационного контроля заполнения путей сортировочного парка РЛС-КЗП предназначено для выполнения следующих функций:
обеспечения мониторинга единиц подвижного состава на всей территории сортировочного парка;
обеспечения радиолокационного сопровождения движущихся единиц подвижного состава от момента их въезда в сортировочный парк до момента вытяжки сформированного состава из парка;
определения местоположения (координаты) всех транспортных единиц подвижного состава, находящихся в зоне контроля, в реальном масштабе времени.
Устройство обеспечивает получение текущей информации о движении единиц подвижного состава на всей территории сортировочного парка в реальном масштабе времени.
Постовым оборудованием является Центральный вычислительный комплекс ЦВК, который включает в себя компьютеры 1 (вычислители) с архитектурой Intel х86, объединенные через Ethernet-коммутатор 2 с системой автоматизированного управления станционными процессами КСАУ СП (расположена на посту), а также сетевыми Ethernet-каналами и Ethernet-коммутаторами, объединенные с напольным оборудованием.
Вычислителями ЦВК выполняются следующие функции:
- связь с внешней информационной системой - КСАУ СП;
- синхронизация и привязка шкалы времени;
- планирование и диспетчеризация наблюдений радиолокационными измерителями 6;
- формирование и отправка в напольное оборудование исходных данных для наблюдений РИ 6;
- прием данных от напольного оборудования;
- часть первичной сигнальной обработки;
- вторичная статистическая обработка.
Подсистема связи и синхронизации 3 состоит из промышленного контроллера 7, Ethernet-коммутатора 8 и модуля генератора синхроимпульсов МТС 9, который служит для передачи синхросигналов к радиолокаторам, а также выполняет операцию самостоятельной постройки задержек синхросигналов при большом различии длин соединительных кабелей. Команда на выдачу синхросигналов требуемой паре радиолокаторов формируется ЦВК и передается в МГС, далее МГС подает сигнал синхронизации двум из восьми подключенных к нему радиолокаторам, указанным в команде.
Каждая выносная позиция ВП включает в себя:
- промышленный компьютер 4;
- плату обработки сигнала и управления ПОСУ 5;
- радиолокационный измеритель РИ 6.
При работе генератор РИ 6 излучает зондирующие импульсы. Приемник принимает отраженный сигнал с указанного строба дальности и производит обработку этого сигнала. Обработка сигнала в приемнике в каждом периоде зондирования включает в себя три основных стадии:
- фазовое детектирование принятого сигнала с опорным сигналом, являющимся по форме копией зондирующего сигнала передатчика;
- усиление сигнала;
- оцифровка сигнала и передача его в ПОСУ 5.
Плата ПОСУ 5 осуществляет высокоскоростную первичную обработку сигнала по алгоритму скользящего среднего и передает обработанный сигнал в промышленный компьютер 4 для его последующей обработки и передачи по внешнему интерфейсу. Плата ПОСУ 5 также обеспечивает управление элементами плат приемника и генератора.
Антенны ВП 10 и 11 выполнены на базе зеркальной параболической антенны "СТВ-О.6-1.1 АУМ", дооборудованной специально разработанными широкополосными облучателями.
Промышленные компьютеры 4 выполняют следующие функции:
- самоидентификацию в сети и сетевое взаимодействие;
- подачу управляющих команд в ПОСУ 5;
- синхронизацию и привязку шкалы времени;
- прием и измерение данных из ПОСУ 5;
- часть первичной сигнальной обработки;
- отправка результатов измерений в ЦВК.
Радиолокационный контроль заполнения путей сортировочного парка РЛС-КЗП определяет следующие параметры положения отцепов на территории сортировочного парка:
- скорости движения отцепов, при этом погрешность определения скорости движения в диапазоне скоростей от 0 до 1,5 м/с должна быть не более 5%, при скоростях свыше 1,5 м/с - не более 2%; минимальная оцениваемая скорость движения отцепов по сортировочным путям - 0,2 м/с.
- координаты точек прицеливания по каждому сортировочному пути (координаты хвоста и длина отцепа); погрешность определения координаты остановки отцепа на путях сортировочного парка - не хуже 5 м.
- степень заполнения сортировочного пути (коэффициент полезного заполнения), определяемая как суммарная длина окон между стоящими не сцепленными подвижными единицами по каждому сортировочному пути в реальном масштабе времени; распределение окон вдоль сортировочного пути; определяемая длина окна не менее 3 м.
Обновление информации о скорости движущегося отцепа, как и координаты его перемещения на путях сортировочного парка, должно происходить не реже чем через интервал времени, за который отцеп проходит путь не более 5 м.
При роспуске составов ЦВК формирует и выдает команду управления соответствующих ВП, в зоне ответственности которых будет происходить движение отцепов, и эти ВП переходят в режим ожидания отцепов.
В режиме ожидания строб ВП устанавливается на минимальной дальности в соответствующей элементарной области обзора. Радиолокационный сигнал с этой минимальной дальности постоянно поступает в ЦВК. При появлении отцепа в стробе ВП формирует информацию о дальности до отцепа и его скорости. После обнаружения отцепа и определения его скорости система переходит из режима «ожидания» в режим «сопровождения». ЦВК составляет прогнозируемую траекторию движения отцепа, согласно которой осуществляется управление положением строба ВП. Прогнозируемая трасса движения отцепа постоянно корректируется на основе получаемых измерений. На основании скорректированной трассы формируется информация о координате остановки отцепа.
Для реализации радиолокационного контроля заполнения путей РЛС-КЗП сортировочного парка используются СШП радиолокаторы с длительностью сигнала порядка 4 нс. Каждый радиолокатор ведет наблюдение в зоне ответственности, ограниченной шириной его диаграммы направленности. В пределах этой зоны радиолокатор производит обнаружение объектов в узких стробах по дальности, длина которых лежит в пределах 1-0,5 метра. Зоны различных радиолокаторов пересекаются и в совокупности образуют общую зону наблюдения многопозиционной РЛС.
Радиолокационный контроль заполнения путей сортировочного парка РЛС-КЗП представляет собой совокупность управляемых радиолокационных измерителей или выносных позиций - ВП. Каждая из ВП связана кабелем с соответствующим портом ПСС 3, которая, в свою очередь, через Ethernet-канал связи обеспечивает обмен информацией между ВП и ЦВК, а также синхронизацию работы отдельных ВП. Подача питания для ППС осуществляется по силовому кабелю от ближайшего распределительного шкафа. Электропитание на ВП подается по силовому кабелю, соединяющему все ВП с ПСС 3. Каждая ВП и ПСС 3 размещены в отдельном корпусе.
Антенны 10 и 11, корпусы ВП и ПСС 3 монтируются на осветительных опорах, расположенных на территории сортировочного парка.
Эффективность устройства радиолокационного контроля заполнения путей сортировочного парка состоит в качественном контроле заполнения путей сортировочного парка, что позволит сократить время простоя вагонов на роспуске составов и маневровых передвижениях, а также снизить эксплуатационные расходы на содержание аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОЛОКАЦИОННОГО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТЕЙ СОРТИРОВОЧНОГО ПАРКА | 2009 |
|
RU2400387C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ВАГОНОВ В ПАРКЕ СТАНЦИИ | 2014 |
|
RU2578703C1 |
| СИСТЕМА ГОРОЧНОЙ МИКРОПРОЦЕССОРНОЙ ЦЕНТРАЛИЗАЦИИ (ГМЦ) | 2017 |
|
RU2648488C1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| Способ определения ходовых свойств вагонов для корректировки работы подсистемы автоматического роспуска составов горочного комплекса | 2018 |
|
RU2689668C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПОДГОРОЧНЫХ ПУТЕЙ СОРТИРОВОЧНОЙ СТАНЦИИ | 2010 |
|
RU2434774C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПОЛНЕНИЯ ПОДГОРОЧНЫХ ПУТЕЙ СОРТИРОВОЧНОЙ СТАНЦИИ | 2008 |
|
RU2392151C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2308750C1 |
| Оптическое устройство для контроля заполнения пути | 2018 |
|
RU2682523C1 |
Устройство радиолокационного контроля заполнения путей сортировочного парка относится к области железнодорожной автоматики и телемеханики, в частности к устройствам радиолокационного сопровождения движущихся единиц (вагонов) по всей территории сортировочного парка от момента въезда до момента вытяжки сформированного состава из парка и определения положения всех транспортных единиц подвижного состава в реальном масштабе времени. Предлагаемое устройство содержит постовое оборудование в виде вычислительного комплекса, состоящего из компьютеров, объединенных через Ethernet-коммутатор с системой автоматизированного управления стационарными процессами и с напольным оборудованием, состоящим из подсистемы синхронизации и связи и комплекса выносных позиций, каждая из которых включает компьютер с платой обработки сигналов и радиолокационный измеритель, а подсистема связи и синхронизации состоит из контроллера, Ethernet-коммутатора и модуля генератора синхроимпульсов. Достигаемый технический результат - качественный контроль заполнения путей сортировочного парка, обеспечивающий сокращение времени простоя вагонов на роспуске составов и маневренных передвижениях, снижение эксплуатационных расходов на содержание аппаратуры. 1 ил.
Устройство для радиолокационного контроля заполнения путей сортировочного парка, содержащее постовое оборудование в виде вычислительного комплекса, состоящего из компьютеров, объединенных через Ethernet-коммутатор с системой автоматизированного управления станционными процессами и с напольным оборудованием, в состав которого входят радиолокационные измерители, отличающееся тем, что в напольное оборудование введена подсистема синхронизации и связи, а каждый радиолокационный измеритель снабжен платой обработки сигнала и управления, которая обеспечивает управление элементами плат приемника и генератора радиолокационного измерителя и осуществляет высокоскоростную первичную обработку сигнала, и компьютером, предназначенным для приема и измерения данных из платы обработки сигнала и управления и подачу на нее управляющих команд, при этом каждый радиолокационный измеритель посредством кабеля связан с соответствующим портом подсистемы синхронизации и связи, которая через Ethernet-канал связи обеспечивает обмен информацией между радиолокационным измерителем и вычислительным комплексом и синхронизацию радиолокационных измерителей.
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2126164C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2308750C1 |
| Способ получения нитровочно-кислотной смеси | 1945 |
|
SU67289A1 |
| Гидравлический забойный двигатель с редуктором числа оборотов | 1946 |
|
SU68710A1 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ (ВАРИАНТЫ) И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2145093C1 |
| WO 2005056363 A1, 23.06.2005 | |||
| US 20040046546 A1, 11.03.2004 | |||
| US 4611211 A, 09.09.1986. | |||

