Способ относится к области воздушно-десантной подготовки личного состава и может быть использован в тренажерах для подготовки парашютистов.
Известны требования к воздушно-десантной подготовке [7] и ряд устройств для их реализации [8, 9].
Известен способ подготовки парашютистов в аэродинамической трубе и устройства его реализующее [1, 2].
Способ заключается в том, что парашютисты помещаются в аэродинамическую трубу, содержащую рабочие зоны с различными параметрами воздушного потока. При этом парашютисты имеют возможность отрабатывать действия по управлению своим телом во время прыжка.
Недостатком данного способа является то, что он дает возможность отработки лишь отдельных элементов десантирования, нет возможности отработки, во-первых, выхода парашютиста из летательного аппарата и его приземления, во-вторых не обеспечивается отработка управления куполом во время выполнения прыжка.
Известен способ подготовки парашютистов на тренажере, использующим части конструкции летательного аппарата и подвесные системы парашютов, а также устройства, его реализующие [3, 4]. Способ заключается в том, что по команде парашютисты (десантники) подходят к двери в имитируемой части фюзеляжа летательного аппарата (самолета или вертолета) и поочередно покидают фюзеляж через дверь, далее закрепленный на тросе манипулятора (крана или система полозьев) парашют с подвесной системой позволяют парашютисту (десантнику) тренироваться в принятии правильного положения тела и конечностей для использования парашютов (основного и запасного), отрабатывать их раскрытие и приземление. Для усиления психосоматического воздействия на парашютиста ему на голову могут одевать очки с жидкокристаллическими индикаторами для создания виртуального пространства.
Недостатком данного способа является то, что он: во-первых обеспечивает привитие ложных навыков и ощущений, за счет того, что распределение нагрузки и сил, возникающих при раскрытии парашюта, реализованных данным способом, не соответствуют реальному воздействию на парашютиста при совершении прыжка, во-вторых не обеспечивает возможность формирования необходимых навыков, связанных с гашением скорости полета парашютиста перед приземлением.
Известен способ подготовки парашютистов на тренажере, моделирующем направление динамических нагрузок, а также устройства его реализующие [5]. Способ заключается в том, что тренируемый (обучаемый) парашютист занимает свое место в тренажере в сиденье на валу и фиксируется в сидении подвесной системой с макетом парашюта, тренажер приводится во вращение в горизонтальной плоскости относительно поверхности Земли, после раскрытия парашюта начинается торможение, скорость вращения гасится до промежуточного значения, а потом вплоть до полной остановки. Для отработки отказа парашюта, применяют вращение сидения подвесной системой в плоскости находящейся под углом к поверхности Земли и в той же плоскости, в которой находится вал с сидением, с закрепленным парашютистом. При этом скорость вращения после раскрытия парашюта снижается до промежуточного значения, а вал с сиденьем вращается вокруг своей оси со стабильной скоростью.
Недостатком данного способа является то, что он обеспечивает привитие ложных навыков и ощущений, за счет того, что не обеспечивает возможность формирования необходимых связанных навыков выхода парашютиста из летательного аппарата, отработки управления куполом во время выполнения прыжка, гашением парашюта после приземления, а также навыка поведения парашютиста при воздействии ветровых потоков, идентичных естественным воздействиям атмосферы Земли.
Наиболее близким к заявляемому способу, то есть прототипом, является способ подготовки парашютистов на тренажере парашютиста [6].
Способ заключается в том, что тренируемый (обучаемый) парашютист занимает свое место в подвесной системе парашюта, закрепленной на раме тренажера, на голову одевают очки виртуальной реальности.
Программное обеспечение на основе 3D-симуляции создает виртуальное пространство, с учетом физических параметров и динамики парашютного спуска и различных параметров окружающей среды (типов парашютных систем, времени суток, погодных условий, рельефа местности, высоты и скорости полета).
При этом на тренажере моделируется импульсная передача результирующего вектора ускорений, передаваемая центру масс парашютиста в направлении движения тренируемого (обучаемого) парашютиста, при этом величины и направления ускорений, полностью соответствуют реальному прыжку, кратковременно воздействуют на тренируемого (обучаемого), при этом моделирование величин и направление результирующего вектора ускорений и их продолжительность воздействия на обучаемого задаются управляющим компьютером на основе информации о массе тренируемого (обучаемого), величине втягивания строп управления. При этом величины и направления вектора ускорения ветра на различных высотах и величины и направления вектора ускорения свободного падения, действующие на центр масс парашютиста при совершении прыжка в любой точке траектории снижения, используются из статистических наблюдений за деятельностью парашютиста при его управляемом снижении. При моделировании результирующего вектора ускорений на тренажере для учета влияния величин векторов и используются показатели режима обучения (штатный прыжок, отработка нештатных ситуаций).
Используя датчики, фиксирующие воздействия, совершаемые тренируемым (обучаемым) парашютистом на элементы подвесной системы парашюта, закрепленной на раме тренажера, программное обеспечение формирует изменение виртуального пространства, моделируя движения парашютиста в воздушной среде от момента покидания летательного аппарата (далее ЛА) до приземления.
Для усиления психосоматического воздействия, очки с жидкокристаллическими индикаторами может содержать наушники имитирующие звуки окружающей среды.
Недостатком данного способа является то, что он обеспечивает привитие ложных навыков и ощущений, за счет того, что не обеспечивает возможность формирования необходимых связанных навыков поведения парашютиста при воздействии ветровых потоков, идентичных естественным воздействиям атмосферы Земли, управления куполом парашюта во время выполнения прыжка, нахождения тела, тренируемого (обучаемого) в правильном положении при маневрировании во время прыжка.
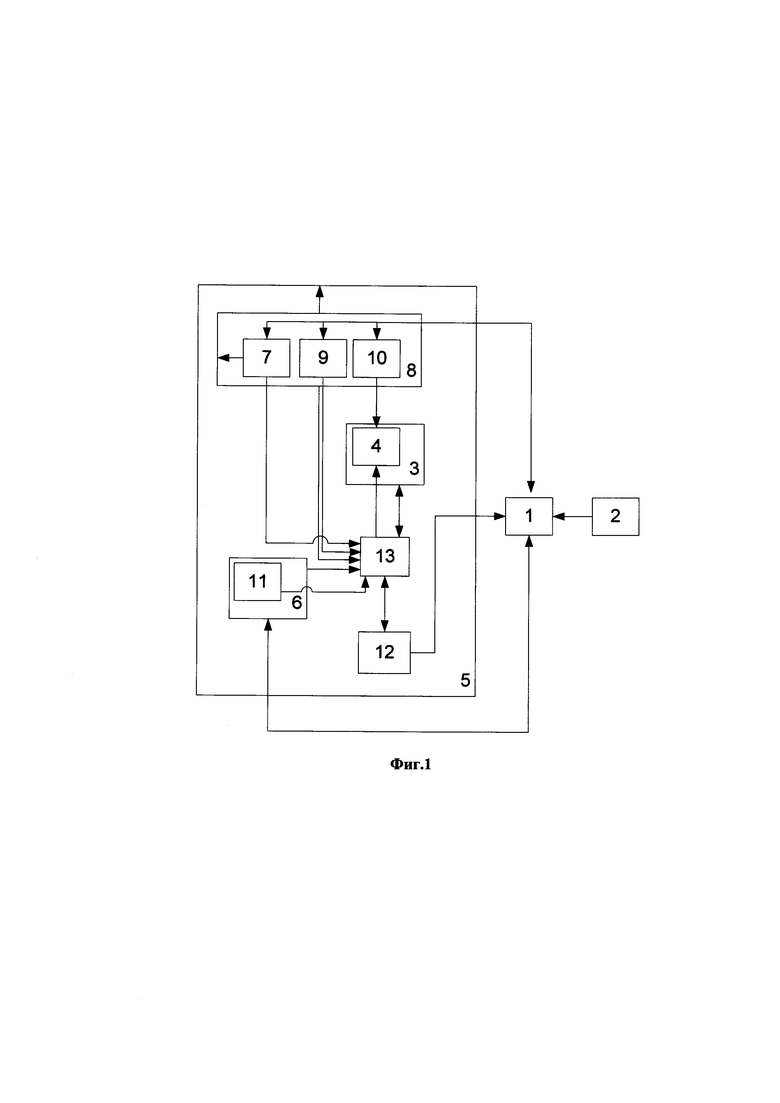
На фиг. 1 представлена схема устройства, реализующего способ прототип.
Устройство, для реализации способа прототипа, состоит из связанных между собой управляющего компьютера (1), рабочего места инструктора (преподавателя) (2), ранца с подвесной системой (3), стропы управления (4), очков виртуальной реальности (6) (также известных как шлем виртуальной реальности) со встроенными аудионаушниками (11), рамы тренажера (5) с электроприводами (7), подвижной тележки (8), привода осевого вращения (9), электропривода сматывания (разматывания) строп управления (10), устройство регистрации положения рук (12) и тренируемого (обучаемого) (13).
Работа по данному способу осуществляется следующим образом.
Тренируемый (обучаемый) (13) экипируется, надевает очки виртуальной реальности (6) с аудионаушниками (11), устройства регистрации положения рук в виде перчаток (12), ранец с подвесной системой (3) и занимает позицию, соответствующую изготовке десантника к отделению от летательного аппарата в раме тренажера (5). При этом одна из рук десантника должна сжимать звено ручного раскрытия парашютной системы, находящегося на ранце с подвесной системой (3). С рабочего места инструктора (преподавателя) (2) через управляющий компьютер (1) задаются данные о массе тренируемого (обучаемого), выбранном режиме обучения на тренажере при отработке штатных и нештатных сценариев при различных метеопогодных условиях.
Далее с рабочего места инструктора (преподавателя) (2) через управляющий компьютер (1) запускается программа, которая осуществляет управление тренажером. Первоначально осуществляется моделирование в очках виртуальной реальности (6) с аудионаушниками (11) момента покидания десантником ЛА, после команды «Пошел» тренируемый (обучаемый) (13) делает энергичный поступательный толчок левой ногой при этом электропривод (7) за счет сматывания строп плавно подымает тренируемого (обучаемого) на минимальное расстояние вверх. Время подъема соответствует времени стабилизированного снижения. Тренируемый (обучаемый) (13) получает визуальное, звуковое и динамическое сопровождение стабилизированного падения. Динамическое сопровождение заключается в импульсном вращении тренируемого (обучаемого) (13) вокруг своей оси с чередованием направления вращений, как по часовой, так и против хода часовой стрелки (за счет работы привода осевого вращения (9), в импульсных колебаниях в горизонтальной плоскости (за счет одновременной работы электроприводов (7).
При выдергивании звена ручного раскрытия тренируемым (обучаемым) (13) парашютистом, производится визуальное, звуковое и динамическое сопровождение раскрытия основной парашютной системы. Динамическое сопровождение состоит в максимально быстром подъеме парашютиста в наивысшую вертикальную позицию, при этом электропривод (7) за счет сматывания строп максимально быстро поднимают парашютиста, моделируя при этом динамический рывок, и обеспечивает получение вектора ускорений, соответствующего реальному динамическому рывку. Продолжительность воздействия импульсного ускорения ограничивается геометрическими размерами тренажера, т.е. тренируемый (обучаемый) за счет работы системы приводов набирает требуемое ускорение, но испытывает его кратковременно. При этом тренируемый (обучаемый) (13) получает синхронизированное аудио-видео сопровождение через очки виртуальной реальности (6) с аудионаушниками (11), заключающееся в проецировании меняющихся сцен при вступлении в работу основного купола парашюта и генерации сопутствующих звуков.
Для раскрытия основного купола, имитируемого в виртуальной реальности парашюта и управления им тренируемый (обучаемый) парашютист перемещает стропы управления (4). Информация о величинах перемещений поступает на управляющий компьютер (1) электроприводов для разматывания (сматывания) строп управления (10). Все результаты действий тренируемого (обучаемого) регистрируются программно-аппаратным комплексом управляющего компьютера (1) для последующей автоматической оценки, также осуществляется моделирование аудио-видео сопровождения в очках виртуальной реальности (6) с аудионаушниками (11) и управляемого динамического сопровождения в зависимости от действий тренируемого (обучаемого).
Привод осевого вращения рамки подвеса парашютиста (9) создает нелинейные угловые ускорения вращения вокруг своей оси в зависимости от взаимного положения строп управления (4) парашютной системой. Например, если парашютист вытянул левую стропу управления вниз до конца, при этом правая стропа управления находилась в верхнем положении, то первый разворот на 360 градусов он совершит за 8 секунд, а уже третий за 4 секунды.
При подготовке к приземлению тренируемый (обучаемый) анализирует проецируемое в очках виртуальной реальности (6) с аудионаушниками (11) элементы внешней среды. С высоты 25…30 метров тренируемый (обучаемый) полностью отпускает стропы управления (в верхнее положение), набирает горизонтальную скорость, развиваемую парашютной системой и на высоте 3…6 метров, втягивает стропы управления на полную длину рук (вниз). При этом происходит как бы «вспухание» купола и на время 1…3 секунды, вертикальная скорость снижается до 2 метров в секунду. Если тренируемый (обучаемый) раньше втянет стропы управления на полную длину рук (высота более 6 метров), то через 3 и более секунды он приобретает вертикальную скорость снижения более 6 метров в секунду, что влечет получение серьезных травм от удара о землю. В результате действий тренируемого (обучаемого) программно-аппаратный комплекс управляющего компьютера (1) сохраняет необходимую информацию о действиях парашютиста для последующей автоматической оценки, осуществляет моделирование аудио-видео и динамического сопровождений.
Во время работы тренажера в очках виртуальной реальности (6) с аудионаушниками (11) тренируемый (обучаемый) наблюдает созданную в виртуальной среде подвесную систему, элементы купола или крыла, левую и правую стропы управления со звеньями, устройство рифления, свои руки - через устройство регистрации положения рук в виде перчаток (12), площадку приземления с достаточной детализацией в зависимости от высоты, солнце (луну), ЛА, метеоусловия и т.д. Аудиосопровождение включает гул ЛА, звуки ветра, звуки от работы парашютной системы, голоса на площадке приземления. Динамическое сопровождение управляемого снижения парашютиста в момент подготовки к приземлению также обеспечивается импульсными перемещениями подвижной тележки (8) и приводом осевого вращения (9) по траекториям, задаваемым программно-аппаратным комплексом управляющего компьютера (1) в зависимости от положения строп управления (4), точки в траектории его снижения при отработке сценария прыжка, выбранного режима обучения с учетом вектора ускорения ветра на различных высотах и ускорения свободного падения, действующих на центр масс парашютиста. Окончание динамического сопровождения происходит после касания ног поверхности пола.
Недостатком устройства является, во-первых отсутствие адекватной управляемой фазы свободного падения, во-вторых невозможность данной системы подвеса парашютиста обеспечивать центры вращения тела, как в реальном полете, в третьих отсутствие ветровых воздействий на обучаемого (тренируемого) идентичных естественным во время имитации прыжка (покидания борта летательного аппарата) и при пилотировании, в четвертых отсутствие возможности отработки режима приземления с различными скоростями относительно земли в зависимости от управления парашютом.
В основу изобретения положена задача повышения качества обучения парашютистов, за счет, отработки навыков поведения при воздействии ветровых потоков, идентичных естественным воздействиям атмосферы Земли, управление в зависимости от типа парашютной системы куполом или крылом (далее парашютом), применение запасного парашюта, применения спецсредств во время десантирования.
Для достижения указанной цели в способ подготовки парашютистов, дополнительно вводится обдув потоком воздуха, тренируемого (обучаемого) парашютиста для имитации воздействия воздушного потока при выполнении прыжка с парашютом, изменение направлений и свобод перемещения тела тренируемого (обучаемого) парашютиста при свободном падении и при раскрытии парашюта, а также имитируется динамика касания тренируемого (обучаемого) парашютиста поверхности Земли.
Обдув воздухом тренируемого (обучаемого) (13) парашютиста происходит после покидания, им имитируемого летательного аппарата для выполнения прыжка.
Для изменения направлений вращения и свободы перемещения тела тренируемого (обучаемого) парашютиста при свободном падении и при раскрытии парашюта, обучаемый закрепляется в устройстве фиксации спины (также называемое «спинной захват»), являющемся частью подвесной системы и для имитации состояния невесомости и замены силы встречного потока воздуха воздействующего при выполнении реального прыжка на парашютиста при свободном падении путем опрокидывания тела тренируемого (обучаемого) парашютиста «на спину» тела тренируемого (обучаемого) парашютиста в плоскость параллельную плоскости поверхности Земли, а для имитации раскрытия парашюта и для дальнейшего управления им тело тренируемого (обучаемого) парашютиста в спинном захвате перемещается в плоскость перпендикулярную плоскости поверхности Земли.
Для имитации свободного полета тренируемый (обучаемый) (13), вначале наклоняется вперед рамой с противовесами (17), как при реальном прыжке, а затем запрокидывается на спину, при этом используется сила гравитации, которая отклоняет все конечности тренируемого назад, создавая у него ощущение полета во встречном потоке воздуха с большой скоростью, и в дополнение он обдувается потоком воздуха для имитации ощущения воздействия воздушного потока на одежду и кожу лица, как и при реальном прыжке, при этом Земля в виртуальном пространстве поворачивается таким образом, что (обучаемый) (13) получает ощущения идентичные возникающим при реальном прыжке с парашютом.
Динамика касания, тренируемого (обучаемого) парашютиста поверхности Земли имитируется за счет физического касания и перемещения по движущемуся полотну дорожки в момент, скоординированный по времени с демонстрирующимся в жидкокристаллических индикаторах виртуальными изображениями в одетых на голову тренируемого (обучаемого) парашютиста очках виртуальной реальности.
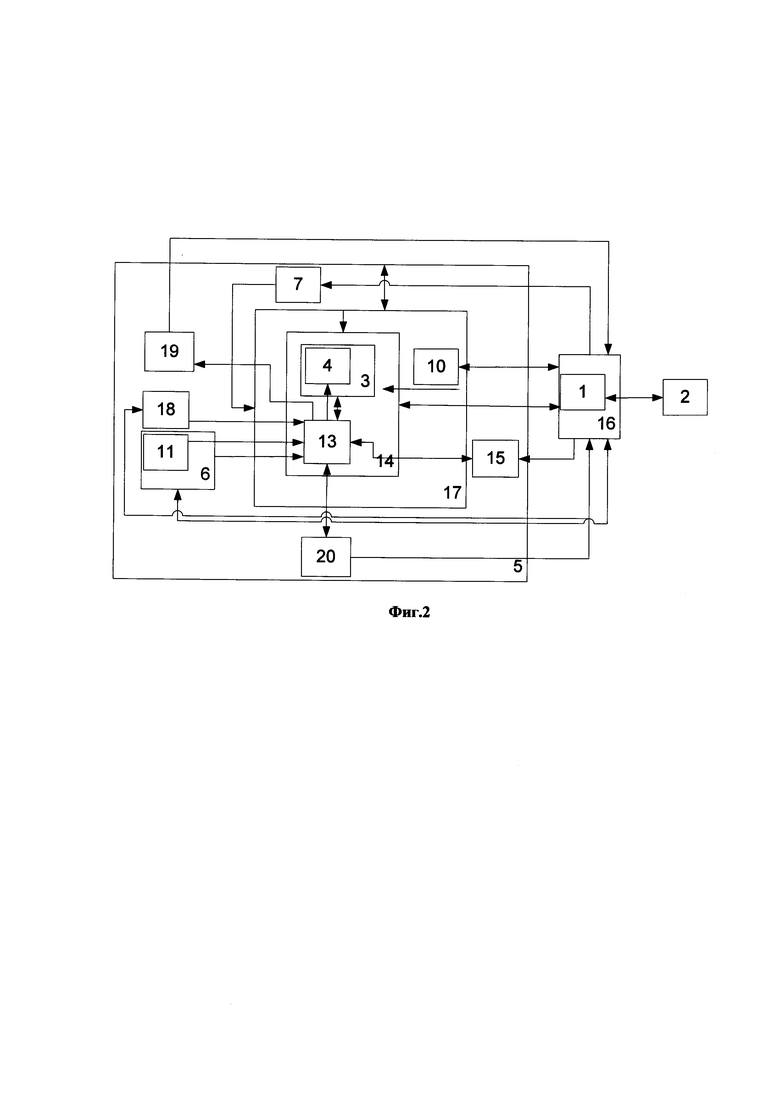
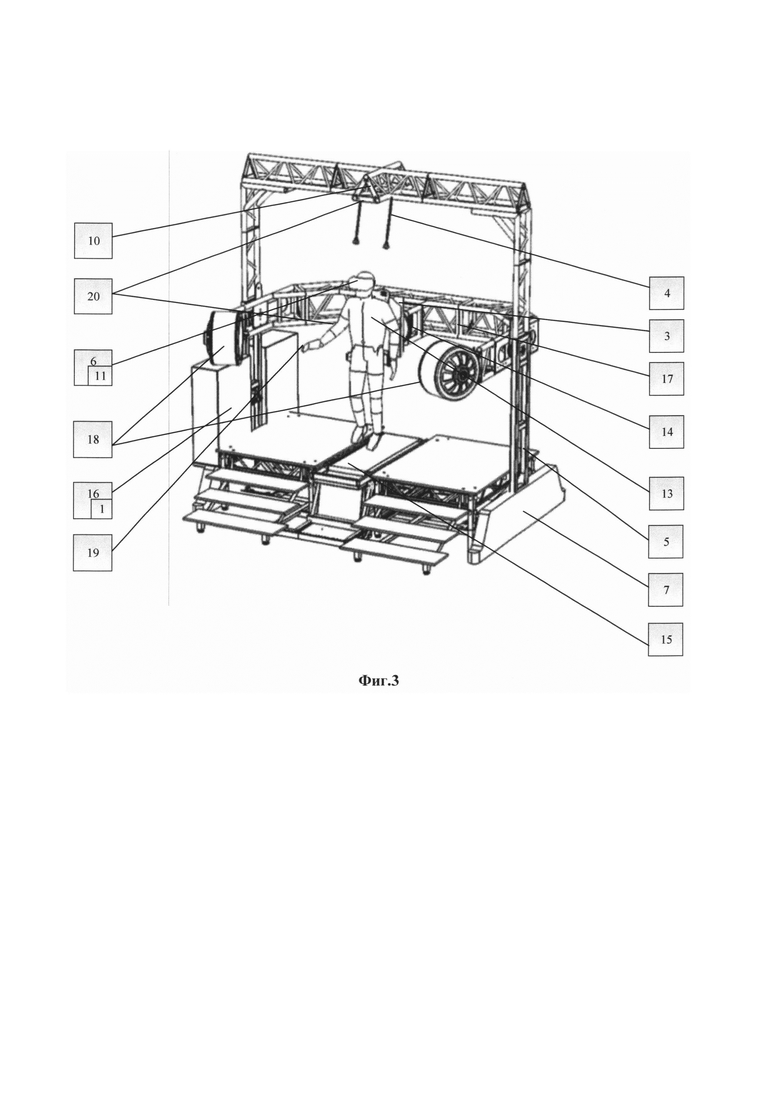
Устройство, реализующее предлагаемый способ приведено на фиг. 2 и состоит из связанных между собой вновь введенного устройства фиксации спины тренируемого (обучаемого) с приводом его вращения (14) тренируемого (обучаемого) (13), постамента содержащего регулируемую движущуюся дорожку (15), рамы с противовесами (17) с закрепленным на ней устройством фиксации спины тренируемого (обучаемого) с приводом его вращения (14), шкафа управления (16) содержащего в частности управляющий компьютер (1), рамы с противовесами (17), генераторов воздушного потока (18), закрепленных на раме тренажера с противовесами (17), датчиков определяющих положение рук, ног, головы, тела тренируемого (обучаемого) (20), закрепленные, например, на одежде тренируемого (обучаемого) (13), так же может быть манипулятор (19), обычно располагаемый в руке тренируемого (обучаемого), жестко закрепленной на Земле рамы тренажера (5) с электроприводами (7) в виде фермы равнопрофильного сечения с постаментом, содержащем регулируемую движущуюся дорожку (15), рабочего места инструктора (преподавателя) (2), ранца подвесной системой (3) парашюта, содержащей стропы управления (4), электропривода сматывания (разматывания) строп управления (10), электроприводов (7), тренируемого (обучаемого) (13), очков виртуальной реальности (6) со встроенными аудионаушниками (11), находящиеся на голове тренируемого (обучаемого) (13) и связанного с управляющим компьютером (1).
Манипулятор (19) применяется для имитации снаряжения тренируемого, например, автомата АКС-74У, гранатомета РПГ-26, ножа, или пистолета и прочих специальных средств, средств связи.
Внешний вид тренажера подготовки парашютистов представлен на фиг. 3.
Противовес на раме с противовесом (17) позволяет затрачивать меньше усилий приводу вращения рамы тренажера (10), при выполнении перемещений в пространстве тренируемого (обучаемого) (13), закрепленного в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14).
Устройство, реализующее предлагаемый способ работает следующим образом:
Датчики, определяющие положение рук, ног, головы, тела тренируемого (обучаемого) (20), закрепляются например, на костюме тренируемого (обучаемого) (13).
Тренируемый (обучаемый) (13), помещается в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) и ранца подвесной системой (3) парашюта, содержащей стропы управления (4), где фиксируется. На голову тренируемому (обучаемому) (20) надевают очки виртуальной реальности (6) со встроенными аудионаушниками (11).
Тренируемый (обучаемый) (13) закрепленный в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) и ранце подвесной системы (3) парашюта, содержащей стропы управления (4), помещается в раме с противовесом (17), таким образом, чтобы касаться ногами регулируемой движущейся дорожки постамента, содержащего регулируемую движущуюся дорожку (15).
Очки виртуальной реальности (6) начинают отображать сформированные управляющим компьютером (1), по команде с рабочего места инструктора (преподавателя) (2) объекты в виртуальном пространстве (летальный аппарат, аппарель, других виртуальных тренируемых, одежду, систему крепления парашюта и т.д.) таким образом, обеспечивается возможность полунатурной имитации выхода из аппарели летательного аппарата.
С рабочего места инструктора (преподавателя) (2) через управляющий компьютер (1) запускается программа, которая осуществляет управление тренажером и осуществляет формирование виртуального пространства. Программное обеспечение тренажера обеспечивает отработку как штатного спуска тренируемого (обучаемого) (13) с парашютом, так и действия в нештатных ситуациях, например, при отказе основного парашюта. Виртуальное пространство формируется управляющим компьютером (1), а образованное виртуальное пространство, в котором тренируемый (обучаемый) (13) видит трехмерное изображение виртуального мира, отображается тренируемому (обучаемому) (13) в очках виртуальной реальности (6), располагаемых на голове тренируемого (обучаемого) (13).
Аудиосопровождение тренировки производится управляющим компьютером (1) через встроенные аудионаушники (11). Аудиосопровождение включает имитацию гула моторов ЛА, звуки ветра, звуки от работы парашютной системы, голос выпускающего, подающего команды тренируемому (обучаемому) (13) «Приготовиться», «Прыжок», «Пошел», «Отставить».
После выхода тренируемого (обучаемого) (13) из имитируемой в виртуальном пространстве аппарели летательного аппарата, по команде из шкафа управления (16), содержащего в частности управляющий компьютер (1), регулируемая движущаяся дорожка постамента отъезжает назад и опускается, электропривод (7), отклоняет раму с противовесами (17), с тренируемым (обучаемым) (13), закрепленным в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) и с ранцем подвесной системы (3) парашюта, содержащем стропы управления (4). Положение рамы с противовесами (17) изменяется относительно плоскости поверхности Земли, при помощи механизма привода вращения устройства фиксации спины (14), вращает устройство фиксации спины, положение тела тренируемого (обучаемого) (13), в устройстве фиксации спины тренируемого (обучаемого) с приводом его вращения (14) изменяется относительно вертикальной плоскости по отношению к поверхности Земли, изменения положения рук, ног, головы тренируемого считываемые датчиками определяющими положение рук, ног, головы, тела тренируемого (20), обрабатываются в шкафу управления (16), управляющий компьютер (1), формирует виртуальное пространство с изменениями относительно положения тела тренируемого (обучаемого) (13), в очках виртуальной реальности (6), продолжает отображать виртуальные объекты, таким образом, обеспечивается возможность имитации свободного падения и спуска на парашюте.
Для имитации потока воздуха при реальном прыжке у тренируемого (обучаемого) (13), потоки воздуха формируются генераторами воздушного потока (18) и обдувают тренируемого (обучаемого) (13), потоки воздуха изменяются генераторами воздушного потока (18) по команде шкафа управления (16) в зависимости от данных поступающих от очков виртуальной реальности (6). Дополнительно управляющий компьютер (1) может создавать аудио имитацию ветра и передавать звуки тренируемому (обучаемому) (13) через встроенные аудионаушники (11) в очки виртуальной реальности (6).
Таким образом, осуществляется имитация сноса парашютиста, срыва парашюта или свободного падения.
Движения, совершаемые телом, руками или ногами тренируемого (обучаемого) (13) закрепленным в ранце подвесной системы (3) парашюта, содержащей стропы управления (4) в реальном пространстве, фиксируются и измеряются датчиками, определяющими положение рук, ног, головы, тела тренируемого (обучаемого) (13), манипулятором (19) и электроприводом сматывания (разматывания) строп управления (10). Данные от датчиков, определяющих положение рук, ног, головы, тела (обучаемого) (13), генераторов воздушного потока (18), манипулятора (19), электропривода сматывания (разматывания) строп управления (10) поступают в управляющий компьютер (1) шкафа управления (16), где обрабатываются совместно с данными о виртуальном пространстве. Управляющий компьютер (1), принимая во внимание массу тела тренируемого (обучаемого) (13), ускорение свободного падения, направление и скорость имитируемого ветра, взаимодействие тренируемого (обучаемого) (13) с объектами в виртуальном пространстве, генерирует изменения в виртуальном пространстве с учетом обработанных данных, например, измененные положения в виртуальном пространстве частей тела тренируемого (обучаемого) (13) или положения облаков, поверхности Земли.
Измененные данные виртуального пространства отображаются тренируемому в очках виртуальной реальности (6), а также выводятся на рабочее место инструктора (преподавателя) (2).
Формирование виртуального пространства с изменениями, связанными с физическими действиями тренируемого (обучаемого) (13), в реальном пространстве и отображением данного пространства тренируемому (обучаемому) (13), обеспечивает возможность имитации и отработки действий по управлению основным или запасным парашютом в процессе снижения и приземления, гашения скорости полета тренируемого (обучаемого) перед приземлением, применения запасного парашюта, применения спецсредств во время десантирования.
Инструктор (преподаватель) на рабочем месте инструктора (преподавателя) (2), основываясь на данных датчиков определяющих положение рук, ног, головы, тела тренируемого (обучаемого) (13), манипулятора (19), электропривода сматывания (разматывания) строп управления (10), обработанных управляющим компьютером (1) проводит мониторинг и анализ правильности действий тренируемого (обучаемого) (13) после поступления команд выпускающего, во время выполнения прыжка и приземления. По команде «Приготовиться», тренируемый (обучаемый) (13) должен:
а) встать, визуально проверить зацепление карабина на ранце с подвесной системой (3), убедиться, что имитируемый прибор на запасном парашюте не разблокирован (блокировочный шнур должен находиться в петле);
б) подойти к аппарели (если тренируемый (обучаемый) (13) прыгает первым в заходе) или встать за парашютистом, прыгающим раньше;
в) правой рукой взяться за вытяжное кольцо, левую руку наложить на правую.
По команде «Прыжок» тренируемый (обучаемый) (13) покидает летательный аппарат в установленной очередности.
По команде «Пошел» тренируемый (обучаемый) (13) отделяется от имитируемого летательного аппарата в следующей последовательности:
а) серединой ступни левой ноги упереться в задний нижний угол двери (аппарели);
б) слегка нагнувшись, плавно оттолкнуться от порожка двери, перпендикулярно оси летательного аппарата, ногами вниз;
в) отделившись от летательного аппарата, правую ногу приставить к левой;
г) в целях обеспечения нормального раскрытия парашюта при падении стараться сохранить вертикальное положение и группировку до момента раскрытия парашюта (динамического удара).
После отделения от имитируемого в виртуальном пространстве летательного аппарата в свободном падении (при стабилизации) сохранять группировку до полного раскрытия парашюта. Сделать задержку в раскрытии парашюта, определенную заданием на прыжок (после 3 сек стабилизированного падения) резким движением правой руки выдернуть вытяжное кольцо раскрытия парашюта. В момент выдергивания кольца сгруппироваться. Почувствовав рывок (динамический удар) визуально коррелированный с моделированием открытия парашюта, тренируемый (обучаемый) (13) должен:
а) поднять голову вверх и осмотреть парашют;
б) убедившись в его исправности и правильности раскрытия, выдернуть блокировочный шнур прибора на запасном парашюте;
в) осмотреться и убедиться, что рядом на опасном для схождения расстоянии нет парашютистов, осмотр производить спереди, слева, справа, сверху и сзади.
Убедившись в отсутствии опасности в схождении, произвести удобную посадку в подвесной системе. Для этого тренируемый (обучаемый) (13) должен взяться левой рукой за левую группу лямок, а большой палец правой руки наложить на круговую лямку в месте сидения. Натянув левую группу лямок вниз, большим пальцем правой руки передвинуть круговую лямку вперед, до удобной посадки. Сдвинув круговую лямку справа, положение рук поменять и сдвинуть круговую лямку слева.
Произведя удобную посадку в подвесной системе, определить направление относа и место своего вероятного приземления. При необходимости (наличие препятствий в предполагаемом месте приземления) принять меры для ухода от приземления на неровную поверхность, лес, воду, препятствия, изменив величину и направления относа, посредством направления движения и горизонтальную скорость движения при помощи строп управления.
При парашютировании возможно раскачивание парашюта, которое устраняют путем натяжения передних или задних лямок. При наклонении парашюта вперед от вертикальной оси натянуть задние лямки. При достижении парашютом вертикального положения задние лямки отпустить и, при переходе парашюта назад, натянуть передние лямки.
Перед приземлением заблаговременно (учитывая время разворота парашюта) до высоты 100-150 м подготовиться к приземлению и принять правильное для приземления положение тела:
а) развернуться строго лицом по ветру, чтобы земля бежала под ноги назад. Направление ветра определяется по стреле, выложенной на площадке приземления, и по смещению относительно тренируемого (обучаемого) (13) местных предметов на земле;
б) ноги соединить в коленях и ступнях вместе и, в зависимости от скорости ветра, вынесены вперед, а в штилевую погоду держать почти вертикально, полусогнутыми в коленях;
в) ступни ног параллельны земле/
При правильно занятом положении все предметы на земле кажутся движущимися под ноги тренируемого (обучаемого) (13), строго спереди. Если предметы движутся в сторону или из-под ног (ветер сбоку или в лицо), на неуправляемом парашюте необходимо применить метод скольжения - путем натяжения одной из лямок довернуть парашют в нужную сторону так, чтобы корпус занял положение лицом по ветру (ветер дует в спину). При таком положении руки тренируемого (обучаемого) (13) перед приземлением остаются свободными, и парашютист может устранять возможное раскачивание перед приземлением, применить торможение.
Если тренируемый (обучаемый) (13) оказался перед приземлением лицом не по ветру, а для разворота парашюта методом скольжения нет высоты, он должен методом перекрещивания лямок развернуть корпус так, чтобы оказаться лицом по ветру.
За 10-15 сек до касания смоделированной в виртуальном пространстве земли тренируемый (обучаемый) (13) должен принять изготовочную позу и встретить землю в сгруппированном состоянии. Касаться земли необходимо полными ступнями обеих ног одновременно (во избежание растяжения голеностопных суставов или других повреждений ног). Стопы держать параллельно поверхности приземления. Чтобы уменьшить силу удара при приземлении, необходимо ноги слегка согнуть в коленях и держать их напряженно до встречи с землей, коснувшись сделать небольшое приседание, чтобы смягчить удар.
В момент приземления тренируемый (обучаемый) (13) не должен пытаться устоять на ногах - необходимо упасть вперед или на бок (при сильном ветре сделать перекат).
Для уменьшения горизонтальной скорости в момент касания земли ногами при ветре необходимо (если руки не заняты разворотом методом перекрещивания лямок) как можно больше натянуть задние лямки свободных концов подвесной системы и удерживать их в таком положении до приземления. При этом воздух, выходящий из-под кромки парашюта, создаст реактивную силу, направленную против ветра, что несколько уменьшит горизонтальную составляющую скорости. Чтобы принять наиболее устойчивое положение при приземлении в штиль, следует слегка натянуть передние лямки, создав парашюту горизонтальную скорость.
После приземления необходимо сразу же отстегнуть парашютную систему.
Также отлеживаются действия тренируемых (обучаемых) (13) в особых (нештатных) случаях (отказ летательного аппарата на разных высотах, попадание стабилизирующего или вытяжного парашюта в ноги парашютиста, зависание парашютиста за летательным аппаратом, закрутка строп, схождение парашютистов в воздухе и попадание в стропы другого парашютиста, закрутка строп, попадание в восходящие и нисходящие потоки, перехлестывание парашюта стропами, отказы парашюта в работе, приземление на препятствия).
Для купольных парашютных систем дополнительно возможна отработка гашения купола парашюта и действий тренируемого (обучаемого) (13) при протаскивании парашютиста по земле под действием ветра.
Для гашения купола необходимо приземлившись, быстро встать на ноги и забежать за купол с подветренной стороны.
При выполнении прыжков с парашютом при силе ветра от 3 м/сек и более, после приземления характерно протаскивание тренируемого (обучаемого) (13) по поверхности Земли. Зачастую применяют два основных способа гашения купола парашюта.
Способ первый - после приземления тренируемый (обучаемый) (13) встает на ноги (первые 1-2 сек после приземления) и забегает в подветренную сторону за купол. Если тренируемый (обучаемый) (13) не смог встать на ноги и его протаскивает, можно сделать еще попытку встать. Для этого необходимо взяться руками за свободные концы подвесной системы, резко сгруппироваться и забросить ноги вперед, упереться ими в землю. Так как купол тянет тренируемого (обучаемого) (13) за плечи, то он и помогает встать парашютисту на ноги. Оказавшись на ногах, необходимо немедленно забежать за купол.
Способ второй - если погасить купол первым способом не удалось и тренируемого (обучаемый) (13) протаскивает, необходимо взять 2-3 нижних стропы (или одну стропу управления на управляемом куполе типа Т4 или П1-У) и энергично перехватывая их руками, тянуть к себе до самой кромки купола, пока тот не погаснет.
После погашения купола тренируемый (обучаемый) (13) должен встать на ноги и осмотреться, и если недалеко от него происходит протаскивание другого парашютиста, то он обязан помочь ему погасить купол.
Для имитации приземления и протаскивания по поверхности Земли при гашении парашюта, по команде из шкафа управления (16), регулируемая движущаяся дорожка постамента, поднимается, электропривод (7) меняет положение рамы с противовесами (17), так, чтобы тренируемый (обучаемый) (13) мог коснуться ногами регулируемой движущейся дорожки постамента. Датчики, определяющие положение рук, ног, головы, тела тренируемого (обучаемого) (20) и манипулятор (19) фиксируют положения отслеживаемых объектов управляющий компьютер (1), соотносит их с необходимой моделью действий для гашения купола парашюта при приземлении.
Для целей повышения эффективности моделирования динамики прыжка, вектор ускорения воздействующей на тренируемого (обучаемого) (13) при реальном и моделируемом прыжке может быть представлен следующей системой уравнений:

где  - результирующий вектор ускорений, передаваемый центру масс тренируемого (обучаемого) при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления;
- результирующий вектор ускорений, передаваемый центру масс тренируемого (обучаемого) при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления;
 - результирующий вектор ускорений, передаваемый центру масс парашютиста при моделировании прыжка на тренажере с продолжительностью воздействия s;
- результирующий вектор ускорений, передаваемый центру масс парашютиста при моделировании прыжка на тренажере с продолжительностью воздействия s;
ƒ(…) - функция от различных переменных;
 - величины втягивания строп управления;
- величины втягивания строп управления;
 - вектор ускорения ветра на различных высотах h, в смоделированном прыжке задаваемых через время прыжка, тренируемого (обучаемого) t';
- вектор ускорения ветра на различных высотах h, в смоделированном прыжке задаваемых через время прыжка, тренируемого (обучаемого) t';
 - вектор ускорения свободного падения, действующий на центр масс парашютиста при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления;
- вектор ускорения свободного падения, действующий на центр масс парашютиста при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления;
R - выбранный режим обучения на тренажере при отработке штатных и нештатных сценариев при различных метеоусловиях;
t - временной показатель, характеризующий место парашютиста в точке траектории его снижения при отработке сценария прыжка (реального и смоделированного) от момента отделения от летательного аппарата до приземления;
Тренировка на предложенном тренажере воздушно-десантной подготовки обеспечит повышение качества обучения десантников для выполнения отработки навыков по управлению основным парашютом в процессе снижения и приземления, применение запасного парашюта, применения спецсредств во время десантирования.
Возможность имитации ветровых потоков, имитации в виртуальном пространстве нагрузок, идентичных испытываемым при реальном прыжке, полезной нагрузки десантника, возможность отработки гашения скорости полета тренируемого (обучаемого) перед приземлением, возможность при имитации десантирования в виртуальном пространстве обеспечить нахождение тела тренируемого (обучаемого) в естественном положении идентичном положению парашютиста при колебательном процессе системы парашют-человек во время реального прыжка, возможность отработки применения спецсредств, позволяют выполнять на предложенном тренажере широкий спектр упражнений как для общей десантной подготовки, так и для отработки применения спецсредств таких как, например, АКС-74У или РПГ-26 во время прыжка.
Предложенный способ подготовки парашютистов в отличие от способа-прототипа, за счет обеспечения нахождения тела тренируемого (обучаемого) в естественном положении идентичном положению парашютиста при колебательном процессе системы парашют-человек во время реального прыжка, обдува потоком воздуха тренируемого (обучаемого) парашютиста для имитации воздействия воздушного потока при выполнении прыжка с парашютом, изменении направлений и свобод перемещения тела тренируемого (обучаемого) парашютиста при свободном падении и при раскрытии парашюта, возможности отработки гашения скорости полета тренируемого (обучаемого), а также имитации касания тренируемого (обучаемого) парашютиста поверхности Земли дает возможность отрабатывать навыки по управлению парашютом в процессе прыжка и приземления, применение запасного парашюта, применения спецсредств во время десантирования, что прививает необходимые связанные навыки при прыжке с парашютом и повышает качество обучения парашютистов.
Источники информации:
1. Патент №2389528 «Аэродинамическая труба для подготовки парашютистов». Опубл. 20.05.2010, Бюл. №14.
2. Патент №2458825 «Устройство для имитации затяжного прыжка с парашютом с вертикальной аэродинамической трубой (варианты) и вертикальная аэродинамическая труба». Опубл. 20.08.2012, Бюл. №23.
3. Патент №2267449 «Десантный тренажер». Опубл. 10.01.2006, Бюл. №1.
4. Патент №2578906 «Тренажер парашютиста десантника». Опубл. 27.03.2016, Бюл. №9.
5. Патент №2538996 «Тренажер парашютиста». Опубл. 10.01.2015, Бюл. №1.
6. Патент №2653900 "Тренажер парашютиста-десантника и способ динамического сопровождения обучения на нем". Опубл. 15.05.2018, Бюл. №14.
7. Руководство по воздушно-десантной подготовке (РВДП-2008). Введено в действие приказом командующего Воздушно-десантными войсками от 29 мая 2008 года, №169.
8. Учебно-тренировочный комплекс воздушно-десантной подготовки (УТК-ВДП). Технический проект. Пояснительная записка. ВГИП.791491.132ПЗ.
9. Учебно-тренировочный комплекс воздушно-десантной подготовки (УТК-ВДП). Руководство по эксплуатации. ВГИП.791491.132РЭ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки и устройство его реализующее | 2021 |
|
RU2769481C1 |
| Устройство имитации прыжка с парашютом | 2023 |
|
RU2808184C1 |
| Тренажер для парашютно-спасательной подготовки летного состава авиации | 2022 |
|
RU2792911C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки | 2024 |
|
RU2832446C1 |
| ТРЕНАЖЁР ДЛЯ ОТРАБОТКИ ПРЫЖКОВ С ПАРАШЮТОМ (ВАРИАНТЫ) | 2019 |
|
RU2713681C1 |
| Способ подготовки летного состава к аварийному покиданию летательного аппарата и устройство его реализующее | 2024 |
|
RU2832486C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА И СПОСОБ ДИНАМИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБУЧЕНИЯ НА НЕМ | 2016 |
|
RU2653900C1 |
| Способ наземной отработки элементов парашютной подготовки и устройство, его реализующее | 2023 |
|
RU2832674C2 |
| Тренажер для наземной подготовки парашютиста | 2023 |
|
RU2806470C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА | 2019 |
|
RU2712355C1 |
Способ относится к области воздушно-десантной подготовки личного состава и может быть использован в тренажерах для подготовки парашютистов. Способ подготовки парашютистов заключается в том, что парашютист занимает свое место в подвесной системе парашюта, закрепленной на раме тренажера, и одевает очки виртуальной реальности, а инструктор через управляющий компьютер создает виртуальное пространство и выдает команды. Программное обеспечение на основе 3D-симуляции создает виртуальное пространство, с учетом физических параметров, динамики парашютного спуска и различных параметров окружающей среды, используя датчики, фиксирующие воздействия, совершаемые тренируемым парашютистом на элементы подвесной системы парашюта. После покидания имитируемого летательного аппарата парашютист обдувается потоком воздуха для имитации воздействия воздушного потока. Функциональное устройство обеспечивает изменение перемещения тела парашютиста в пространстве при свободном падении и раскрытии парашюта. Приземление имитируется за счет беговой дорожки, скоординированной с очками виртуальной реальности. Повышается уровень подготовки парашютистов. 2 н. и 2 з.п. ф-лы, 3 ил.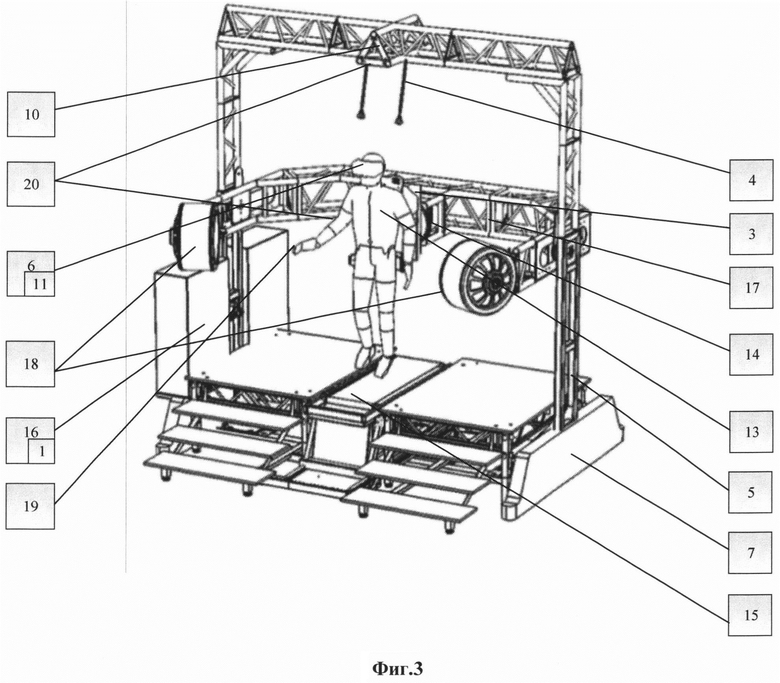
1. Способ подготовки парашютистов, заключающийся в том, что экипированный тренируемый/обучаемый парашютист занимает свое место в подвесной системе парашюта, закрепленной на раме тренажера, на голову одевают очки виртуальной реальности, инструктор/преподаватель через управляющий компьютер создает виртуальное пространство и выдает команды тренируемому/обучаемому, программное обеспечение на основе 3D-симуляции создает виртуальное пространство, с учетом физических параметров, динамики парашютного спуска и различных параметров окружающей среды, типов парашютных систем, времени суток, погодных условий, рельефа местности, высоты и скорости полета, используя датчики, фиксирующие воздействия, совершаемые тренируемым/обучаемым парашютистом на элементы подвесной системы парашюта, программное обеспечение формирует изменение виртуального пространства, моделируя движения парашютиста в воздушной среде от момента покидания летательного аппарата до приземления, отличающийся тем, что после покидания имитируемого летательного аппарата тренируемого/обучаемого парашютиста обдувают потоком воздуха для имитации воздействия воздушного потока при выполнении прыжка с парашютом, функциональным устройством обеспечивается изменение направлений и свобод перемещения тела тренируемого/обучаемого парашютиста в пространстве идентичное перемещениям тела при свободном падении и раскрытии парашюта, а также имитируется касание тренируемого/обучаемого парашютиста поверхности Земли и перемещения по ней, за счет физического касания и перемещения по регулируемой движущейся дорожке в момент, скоординированный по времени с демонстрирующимся в очках виртуальной реальности пейзажей места приземления тренируемого/обучаемого парашютиста.
2. Способ по п. 1, отличающийся тем, что для имитации свободного полета тренируемый/обучаемый, вначале наклоняется вперед рамой с противовесами, а затем запрокидывается на спину.
3. Тренажер для подготовки парашютистов, состоящий из жестко закрепленной на Земле рамы тренажера, электроприводов, управляющего компьютера, рабочего места инструктора/преподавателя, ранца с подвесной системой, строп управления, очков виртуальной реальности, встроенных аудионаушников в очки виртуальной реальности, электропривода сматывания/разматывания строп управления, тренируемого/обучаемого, отличающийся тем, что дополнительно введены в жестко закрепленную на Земле раму постамент, содержащий регулируемую движущуюся дорожку для имитации выхода тренируемого/обучаемого из летательного аппарата и приземления на поверхность Земли, устройство фиксации спины тренируемого/обучаемого с приводом его вращения, связанное с ранцем подвесной системы, шкаф управления, рама с противовесами, подвижная относительно жестко закрепленной на Земле рамы тренажера, генераторы воздушного потока, закрепленные на раме с противовесами, датчики определяющие положение рук, ног, головы, тела тренируемого/обучаемого.
4. Тренажер по п. 3, отличающийся тем, что дополнительно введен манипулятор, располагаемый в руке тренируемого/обучаемого.
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА И СПОСОБ ДИНАМИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБУЧЕНИЯ НА НЕМ | 2016 |
|
RU2653900C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА | 2011 |
|
RU2578906C2 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

