Область техники, к которой относится изобретение
Изобретение относится к передатчикам давления типа, используемого в системах управления промышленными процессами. В частности, изобретение относится к датчику давления для использования в передатчике давления.
Предшествующий уровень техники
Передатчики давления используются в системах управления промышленными процессами для мониторинга давлений технологических текучих сред. Передатчик давления содержит датчик давления, который соединен с технологической текучей средой и выдает сигнал в ответ на давление, прикладываемое технологической текучей средой. Двумя хорошо известными типами передатчиков давления являются передатчики модели 3051 и 3095, предлагаемые фирмой Rosemount Inc. of Chanhassen, Миннесота. Передатчики давления известны также, например, из патента США №5094109.
Во многих устройствах, где измеряют перепад давления, часто желательно получать измерения давления в трубопроводе (т.е. давление технологической текучей среды в трубопроводе или магистрали). Например, давление в трубопроводе можно использовать для определения массового расхода технологической текучей среды или для других целей управления. Однако, если требуется измерение давления в трубопроводе дополнительно к измерению перепада давления, то обычно необходим дополнительный датчик давления. Для этого дополнительного датчика давления требуются дополнительные компоненты и соединения с технологической текучей средой. Это приводит к повышению сложности и стоимости, а также увеличению вероятности выхода из строя.
Кроме того, многие датчики давления соединяются с технологической текучей средой через изолирующую систему, в которой используется изолирующая диафрагма, открытая для технологической текучей среды, и изолирующая текучая среда для заполнения, которая соединяет датчик давления с изолирующей диафрагмой. Эта изолирующая система также является источником ошибок, сложности и возможного выхода из строя в технологических устройствах.
Сущность изобретения
Датчик давления согласно изобретению содержит деформируемый корпус датчика, выполненный из сжимаемого материала. Датчик деформации встроен в деформируемый корпус датчика и имеет электрические свойства, которые изменяются в ответ на деформацию деформируемого корпуса датчика. Электрические соединения проходят от деформируемого корпуса датчика к встроенному датчику деформации.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает разрез датчика давления, общий вид, согласно изобретению;
фиг.2 - разрез датчика давления, установленного в передатчике давления (в разнесенном виде), согласно изобретению;
фиг.3 - продольный разрез передатчика давления, согласно изобретению;
фиг.4 - датчик деформации, на виде сверху, согласно изобретению;
фиг.5 - частичный разрез датчика давления, содержащего датчик деформации, согласно изобретению;
фиг.6А - схему технологической системы, включающей датчик давления, непосредственно открытый для технологической текучей среды, согласно изобретению;
фиг.6В - разрез датчика давления, предназначенного для непосредственного контакта с технологической текучей средой,
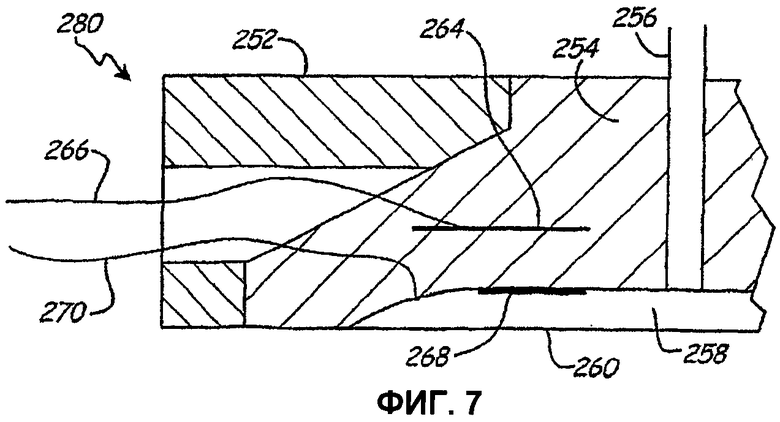
фиг.7 - разрез датчика давления, имеющего основанный на емкости датчик деформации, согласно изобретению.
Подробное описание предпочтительных вариантов воплощения изобретения
Настоящее изобретение относится к датчикам давления типа, используемого в передатчиках давления систем управления промышленными процессами. Согласно изобретению предложен датчик давления, который содержит деформируемый корпус, выполненный из сжимаемого стеклянного материала. Деформируемый корпус датчика может быть выполнен из стекла, керамики, пластмассы или другого устойчивого жесткого изолятора. Используемое здесь понятие «стекло» включает любой устойчивый изолирующий материал. Датчик деформации встроен внутрь корпуса датчика. Датчик деформации имеет электрические свойства, которые изменяются в ответ на деформацию деформируемого корпуса датчика. Предусмотрены электрические соединения, которые проходят через корпус датчика к датчику деформации. При деформации корпуса изменяются электрические свойства датчика деформации, и можно определить величину приложенного давления. Эту конфигурацию можно осуществлять посредством встраивания датчика деформации в датчик перепада давления, так что можно определять давление в трубопроводе. Кроме того, такую конфигурацию можно использовать в качестве датчика давления, который может быть непосредственно открыт для технологической текучей среды без использования системы заполнения изолирующей текучей средой, указанной во вступительной части. Изобретение можно использовать для измерения давления в трубопроводе, а также перепада давления с использованием подходящих конфигураций встроенного датчика деформации.
На фиг.1 показан общий вид датчика 10 перепада давления, в разрезе, согласно изобретению. Датчик 10 давления является одним примером конфигурации датчика перепада давления и содержит установленные изолирующие диафрагмы 36 и 38, которые соединены с соединениями 26 давления, проходящими через корпус 27 датчика. Корпус 27 датчика образован из половинных ячеек 46 и 48 и содержит сжимаемый стеклянный материал. Полость 25 внутри датчика 10 содержит заполняющую текучую среду. Подвижная диафрагма 16 проходит поперек полости 25 и предназначена для перемещения в ответ на прикладываемый перепад давления. Электроды (пластины емкости) 20 расположены на стенке 23 датчика 10. Электрические соединения 40, связанные с электродами 20 и диафрагмой 16, используются для измерения электрической емкости между ними. Эта емкость изменяется при перемещении диафрагмы в ответ на прикладываемое давление и может быть использована для определения приложенного перепада давления.
Согласно изобретению, встроенный датчик 96 деформации установлен внутри деформируемого корпуса 27 датчика 10 давления. Для датчика деформации предусмотрено электрическое соединение 98.
При приложении перепада давления к корпусу 27 датчика через соединения 26 давления дополнительно к перемещению диафрагмы 16 изменяется также общая форма корпуса 27 датчика в ответ на давление в трубопроводе. Деформация формы корпуса датчика обнаруживается с помощью датчика 96 деформации и может измеряться через электрическое соединение 98. Датчик 96 может быть выполнен по любой известной схеме. В некоторых конфигурациях изготовление датчика 10 давления и, в частности, стеклянного корпуса 27 требует воздействия относительно высоких температур. Выбранный датчик 96 деформации должен иметь конфигурацию, которая способна выдерживать действующую высокую температуру.
На фиг.2 показан разрез датчика 10 давления (в разнесенном виде) в корпусе 30 передатчика 28 давления, расположенного между фланцами 32 и 34. Фланцы 32 и 34 соединены с корпусом 30 с помощью болтов 80, закрепленных гайками 82 и уплотненных кольцами 74 и 76 круглого сечения, соответственно. Давление Р1 прикладывается через вход 62 во фланце 32 к изолирующей диафрагме 36. Аналогичным образом, давление Р2 прикладывается через вход 64 во фланце 34 к изолирующей диафрагме 38.
Во время работы давления Р1 и Р2 действуют на соответствующие изолирующие диафрагмы 36 и 38, оказывая тем самым давление на по существу несжимаемую заполняющую текучую среду между центральной диафрагмой и изолирующими диафрагмами 36 и 38. Это вызывает отклонение центральной диафрагмы 16, что приводит к изменению емкости между диафрагмой 16 и электродом 20 и диафрагмой 16 и электродом 24. Электрические проводники 40 соединяют схему 42 передатчика с электродами 20 и 24. Схема 42 передатчика обеспечивает выходной сигнал, относящийся к давлениям Р1 и Р2 в виде функции емкости между электродами 20, 24 и центральной диафрагмой 16 через, например, двухпроводный контур 44 управления процессами. Такие контуры управления процессами известны в области управления процессами и могут содержать, например, контур тока в 4-20 мА.
На фиг.2 показан также датчик 96 деформации, установленный в датчике 10 давления. Датчик 96 деформации соединен со схемой 42 передатчика через электрическое соединение 98. Схема 42 передатчика предназначена для измерения электрических свойств датчика 96 деформации, которые изменяются в ответ на деформацию стеклянного корпуса 27 датчика 10 давления при приложении давлений Р1 и Р2. На основе этих измерений можно определять давление в трубопроводе, приложенное к датчику 10 перепада давления.
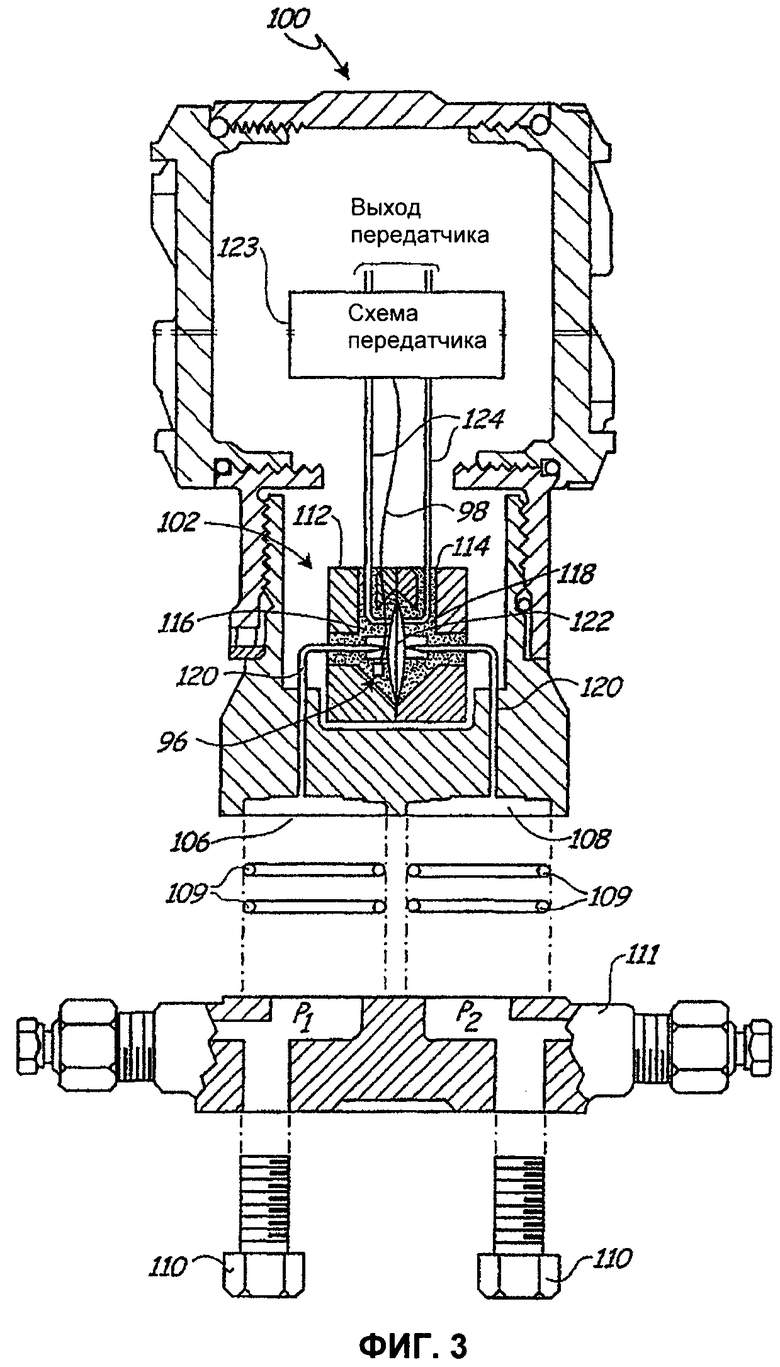
На фиг.3 показан передатчик 100 в разрезе, содержащий датчик 102 давления, согласно другому варианту выполнения изобретения. Передатчик 100 известен в промышленности как имеющий платформу Coplanar™, поскольку изолирующие диафрагмы 106 и 108 размещены в основном в одной плоскости. Фланец 111 соединен с передатчиком 100 болтами 110, что обеспечивает передачу давлений Р1 и Р2 на изолирующие диафрагмы 106 и 108. Прокладки 109 обеспечивают уплотнение между фланцем 111 и изолирующей диафрагмой 106, 108. По существу несжимаемая текучая среда содержится в капиллярах 120, которые соединены с датчиком 102 давления. Аналогично датчику 10 давления, датчик 102 образован из двух половинных ячеек 112, 114, заполненных, соответственно, стеклянным материалом 116, 118. Электрические проводники 124 соединены с емкостными пластинами (не показаны), которые установлены на поверхностях датчика из хрупких материалов 116, 118. Диафрагма 122 отклоняется при приложении давлений Р1 и Р2, вызывая изменение емкости, которое обнаруживает схема 123 передатчика, формирующая выходной сигнал, относящийся к давлениям Р1 и Р2, через двухпроводный контур управления процессами.
Как указано выше, датчик 96 деформации установлен внутри стеклянного материала 116, 118 корпуса датчика давления. Этот датчик 96 деформации имеет электрические характеристики, которые воспринимаются схемой 123 передатчика и могут быть коррелированы с давлением в трубопроводе под действием давлений Р1 и Р2 ко всему корпусу датчика давления.
Датчик 96 деформации может быть выполнен согласно любой подходящей технологии. Датчик 96 предпочтительно может выдерживать экстремальные условия окружающей среды, которые воздействуют на датчик 10 давления. Например, во время изготовления стеклянный материал, из которого выполнен корпус датчика, подвергается воздействию высокой температуры (например, 800-850°С). Датчик 96 может быть, например, элементом тензометра, выполненного со структурой типа «свободной нити», которая не требует дополнительного опорного материала и которая может быть выполнена для работы при температурах до 1150°С. Примеры материалов для тензометра включают:
Kanthal TM (сплав Fe, Cr, Al) для температур до 1150°С;
Karma (75% Ni, 20% Cr, 3% Al, 3% Fe);
платина-иридий (95%, 5%);
нихром (80% Ni, 20% Cr).
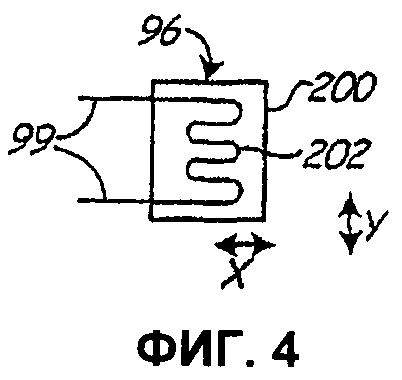
На фиг.4 показан на виде сверху пример выполнения датчика 96 деформации, который изготовлен на подложке 200, несущей нить 202 тензометра. Примером материала для подложки 202 является полупроводниковый материал, такой как поликристаллический кремний или углерод (например, волокна или нанотрубки). Хотя на фиг.4 показан один элемент тензометра, можно использовать также другие конфигурации, включая мостиковые конфигурации.
Во время работы выходной сигнал датчика 96 деформации связан с приложенным давлением в трубопроводе и имеет достаточно высокий уровень сигнала для выполнения измерений давления в трубопроводе в требуемом диапазоне, например, от 100 до 1000 фунт/квадратный дюйм. Датчик деформации может содержать элемент тензометра, имеющего, например, сопротивление 5000 Ом с коэффициентом калибровки 2-4. Кроме того, соотношение между сжимаемостью стекла, в которое встроен датчик, и прикладываемым давлением является относительно постоянным и поэтому не вызывает погрешностей измерения. Дополнительно к этому, в некоторых конфигурациях могут быть предусмотрены дополнительные тензометры или датчики 107 (фиг.5), которые ориентированы так, что на них не влияет прикладываемое давление в трубопроводе. Такой дополнительный тензометр можно использовать в качестве датчика 107 компенсации, например, в качестве опорного датчика, или же использовать для определения температуры датчика. Стеклянные материалы, которые используются в настоящее время для корпуса датчика, обычно являются относительно стабильными. Корпуса датчиков используются также для установки электродов для генерирования сигналов емкости, связанных с перепадом давления. Датчики можно относительно просто изготавливать на высокотемпературной подложке (такой как керамика, кремний или т.п.) способом, аналогичным используемому в настоящее время способу для датчиков температуры PRT. В некоторых конфигурациях для стеклянного корпуса датчика может требоваться дополнительное стекло для снятия напряжений и дополнительный период испытаний на отказ.
На фиг.5 показана в частичном разрезе более детально конфигурация датчика 102 давления. Датчик 96 деформации выполнен в виде тензометра, который испытывает деформацию ΔL/L. Это приводит к изменению сопротивления, измеряемого на электрическом соединении 98 в Δ Ом/статичное давление. В одном примере выполнения датчик 96 имеет длину D около 0,2 дюйма.
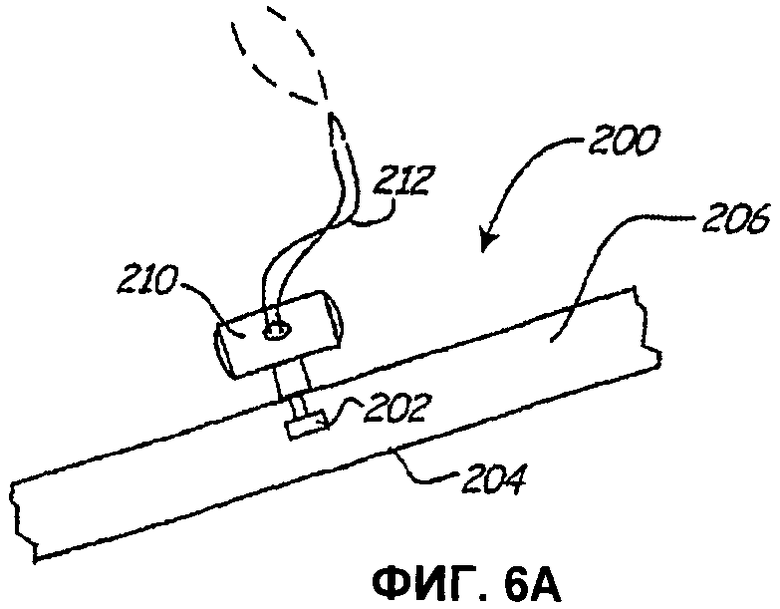
На фиг.6А показана схема промышленного процесса 200, включающая датчик 202 давления, согласно изобретению, который содержит датчик деформации, установленный в деформируемом стеклянном корпусе датчика. На датчик 202 давления непосредственно воздействует технологическая текучая среда, находящаяся в технологическом трубопроводе 204. Это является упрощенной конфигурацией «безмасляной» технологии измерения, которая не требует заполнения изолирующей текучей средой. Датчик 202 давления является частью технологического передатчика 210, предназначенного для соединения с двухпроводным контуром 212 управления процессом, согласно уровню техники.
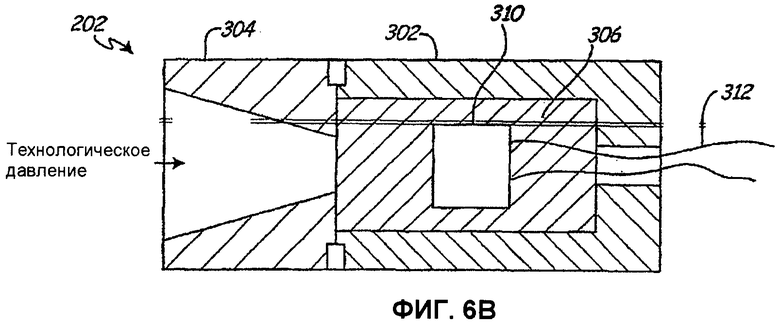
На фиг.6 показан разрез датчика 202 давления, согласно изобретению, предназначенного для непосредственного воздействия технологической текучей среды. Технологическое соединение 304 предназначено, например, для соединения с технологическим трубопроводом. Корпус 302 датчика давления имеет жесткий изолятор 306, такой как стеклянный (включая керамику) изолятор. Датчик 310 сжатия или растяжения находится внутри изолятора 306 и соединен со схемой измерения давления (поз.123 на фиг.3) через электрические соединения 312. В различных вариантах выполнения активные схемы могут содержаться в датчике 310.
В другом примере выполнения (фиг.7) вместо использования тензометра в качестве датчика деформации, предусмотрены емкостные пластины для измерения деформации. Такую конфигурацию можно использовать для измерения перепада давления. На фиг.7 показан в частичном разрезе датчик 250 давления, согласно другому примеру выполнения. Датчик 250 содержит корпус 252 датчика, заполненный диэлектрическим материалом 254, соединенным с технологическим давлением через импульсный трубопровод 256. Внутри датчика 250 давления имеется полость 258, соединенная с импульсным трубопроводом 256. Полость 258 образована диафрагмой 260, которая перемещается в ответ на прикладываемое давление. Пластина или электрод 264, который установлен внутри диэлектрика 254, и электрод 268 образуют конденсатор. Электрод 264 связан с электрическим соединением 266. Вторая пластина 268 конденсатора установлена в диэлектрике 254 или на поверхности наружной кромки полости 258 и связана со вторым электрическим соединением 270. Использование конденсаторных пластин 264 и 268 приводит к созданию между ними емкости. При деформации датчика 250 давления в ответ на прикладываемое давление, как указывалось выше, электрическая емкость между пластинами 264 и 268 изменяется. Посредством измерения этой емкости можно определять деформацию датчика 250 и использовать в соответствии с указанными выше технологиями.
Хотя в приведенном выше описании речь идет о встраивании датчика деформации в стекло, можно использовать также другие материалы, которые имеют желаемые характеристики и состоят из твердого сжимаемого вещества. Примеры включают пластмассы и т.п. Можно использовать любую подходящую технику для измерения деформации, такую как конденсатор, тензометр, оптическая техника, кремниевая техника и т.д. Другие типы датчиков, которые можно встраивать в твердый материал, включают датчик температуры для компенсации измерений. Кроме того, можно использовать несколько датчиков для надежности, избыточности, самопроверки или т.п.


Изобретение относится к передатчикам давления, используемым в системах управления промышленными процессами, в частности, изобретение относится к датчику давления для использования в передатчике давления. Техническим результатом изобретения является измерение перепада давления с использованием подходящих конфигураций встроенного датчика деформации. Датчик давления содержит деформируемый корпус датчика, выполненный из сжимаемого материала. Первое и второе соединения давления для деформируемого корпуса датчика конфигурированы для приема первого и второго давлений. Встроенный датчик деформации, встроенный в деформируемый корпус, имеет электрические свойства, которые изменяются в ответ на деформацию деформируемого корпуса. Электрические соединения перепада давлений проходят от внешней поверхности деформируемого корпуса датчика, имеющего электрические свойства, которые изменяются на основе разности давлений между первым и вторым давлениями, к встроенному датчику деформации. Передатчик управления процессом содержит схему передатчика, соединенную с датчиком давления. Способ измерения давления заключается в определении перепада давления на основе отклонения диафрагмы, установленной в корпусе датчика давления, и определении давления в трубопроводе на основе деформации корпуса датчика. 3 н. и 17 з.п. ф-лы, 7 ил.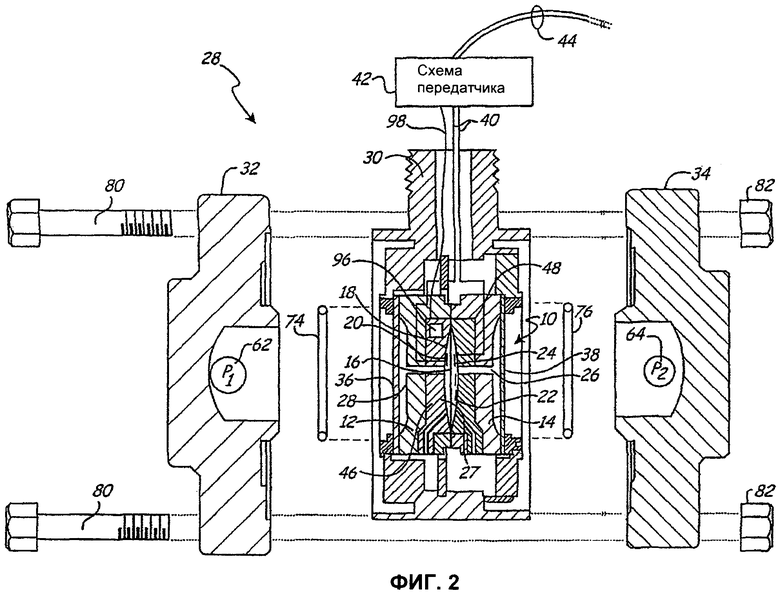
1. Датчик давления, содержащий
деформируемый корпус датчика, выполненный из сжимаемого материала, первое и второе соединения давления для деформируемого корпуса датчика, конфигурированные для приема первого и второго давлений, встроенный датчик деформации, встроенный в деформируемый корпус, имеющий электрические свойства, которые изменяются в ответ на деформацию деформируемого корпуса,
электрические соединения (40) перепада давлений, проходящие от внешней поверхности деформируемого корпуса датчика, имеющего электрические свойства, которые изменяются на основе разности давлений между первым и вторым давлениями, к встроенному датчику деформации.
2. Датчик по п.1, отличающийся тем, что деформируемый корпус датчика содержит стеклянный корпус датчика из сжимаемого стеклянного материала.
3. Датчик по п.1, отличающийся тем, что датчик деформации содержит тензометр.
4. Датчик по п.3, отличающийся тем, что тензометр установлен на подложке.
5. Датчик по п.3, отличающийся тем, что тензометр содержит резистивный элемент, имеющий сопротивление, которое изменяется в ответ на растяжение.
6. Датчик по п.1, отличающийся тем, что датчик деформации включает компенсационный датчик.
7. Датчик по п.1, отличающийся тем, что содержит датчик температуры.
8. Датчик по п.1, отличающийся тем, что датчик деформации содержит конденсатор.
9. Датчик по п.1, отличающийся тем, что датчик давления содержит диафрагму в корпусе датчика.
10. Датчик по п.9, отличающийся тем, что диафрагма предназначена для отклонения в ответ на прикладываемое давление.
11. Датчик по п.9, отличающийся тем, что диафрагма конфигурирована для отклонения в ответ на перепад давлений, прикладываемый к датчику давления.
12. Датчик по п.1, отличающийся тем, что датчик давления связан с технологической текучей средой через изолирующую текучую среду.
13. Датчик по п.1, отличающийся тем, что датчик давления предназначен для непосредственного контакта с технологической текучей средой.
14. Датчик по п.1, отличающийся тем, что электрические свойства встроенного датчика деформации зависят от прикладываемого давления в трубопроводе.
15. Датчик по п.1, отличающийся тем, что электрические свойства встроенного датчика деформации зависят от прикладываемого перепада давления.
16. Передатчик управления процессом, содержащий схему передатчика, соединенную с датчиком давления по п.1.
17. Передатчик по п.16, отличающий тем, что схема передатчика предназначена для определения перепада давления в трубопроводе на основе электрических характеристик датчика давления.
18. Способ измерения давления, заключающийся в том, что
определяют перепад давления на основе отклонения диафрагмы, установленной в корпусе датчика по п.1, и
определяют давление в трубопроводе на основе деформации корпуса датчика.
19. Способ по п.18, отличающийся тем, что деформацию измеряют с помощью тензометра.
20. Способ по п.19, отличающийся тем, что тензометр встроен в корпус датчика.
| DE 1932899 А1, 07.01.1971 | |||
| US 5012677 А, 07.05.1991 | |||
| МИКРОЭЛЕКТРОННЫЙ ДАТЧИК ДАВЛЕНИЯ | 2000 |
|
RU2169912C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1991 |
|
RU2024830C1 |
| Преобразователь разности давлений | 1980 |
|
SU939981A1 |

