Изобретение относится к радиолокации и может быть использовано для исследования процессов обнаружения и сопровождения флюктуирующих целей при взаимном перемещении целей и радиолокатора.
Известен имитатор радиолокационной цели, содержащий последовательно включенные формирователь зондирующего сигнала (ФЗС), управляемый аттенюатор и излучатель, а также устройство управления, выходы которого соединены с управляющими входами формирователя зондирующего сигнала и управляемого аттенюатора [см. книгу Г.Н.Тверского и др. Имитаторы эхо-сигналов судовых радиолокационных станций. - Изд. "Судостроение". - Ленинград. - 1973, с.185-187]. Признаками этого аналога, совпадающими с существенными признаками заявляемого имитатора, являются все перечисленные элементы аналога. Этот аналог обеспечивает формирование на реальной сверхвысокой частоте сигнала, воспроизводящего амплитудные флюктуации эффективной площади рассеяния (ЭПР) надводного корабля, и излучение этого сигнала в направлении исследуемого радиолокатора. В результате, на входе последнего имеет место сигнал, совпадающий по структуре и уровню с реальным отраженным от корабля сигналом.
Однако, при обнаружении и сопровождении кораблей радиолокационными головками самонаведения (РЛГСН) большую роль играют угловые флюктуации (флюктуации энергетического центра переизлучения (ЭЦП) корабля). Они в указанном имитаторе не учитываются.
Известен также имитатор радиолокационной цели, описанный в статье И.Г.Доруха и В.И.Полякова "Имитатор радиолокационной цели" [Вопросы специальной радиоэлектроники. Серия ОВР. - Москва - Таганрог, вып.1 - 2003]. Он содержит последовательно включенные ФЗС, управляемый аттенюатор, усилитель и излучатель с приводом, а также устройство управления, выходы которого соединены с управляющими входами ФЗС, управляемого аттенюатора и привода излучателя. В этом аналоге также все перечисленные признаки совпадают с существенными признаками заявляемого имитатора. В этом имитаторе излучатель, как и в вышеописанном имитаторе, ориентирован максимумом излучения в направлении исследуемого радиолокатора, установленного на расстоянии примерно 10 метров. Однако, в отличие от излучателя в вышеописанном аналоге, здесь он снабжен приводом, обеспечивающим его перемещение в плоскости, перпендикулярной направлению на радиолокатор. При этом с усилителем излучатель соединен гибким волноводом или полужестким коаксиальным кабелем. Указанный имитатор позволяет воспроизводить как амплитудные, так и угловые флюктуации цели.
Недостатком указанного имитатора является сложность, обусловленная необходимостью обеспечения механического перемещения излучателя в плоскости, перпендикулярной направлению на радиолокатор. Он усугубляется наличием гибкого соединения усилителя с излучателем, вызывающим "паразитное" просачивание СВЧ энергии с выхода усилителя, которое делает достаточно затруднительной настройку и регулировку имитатора.
Другой недостаток этого имитатора обусловлен определенной инерционностью перемещения излучателя, а следовательно, и имитируемого перемещения ЭЦП цели, что при малых имитируемых дальностях "радиолокатор - цель" делает имитируемые угловые флюктуации недостаточно адекватными реальным угловым флюктуациям цели, а следовательно, снижает достоверность полученных от использования имитатора результатов.
Наиболее близким по технической сущности к заявляемому (прототипом) является имитатор радиолокационной цели, защищенный патентом РФ №2317563, МПК 7 G01S 7/40. Этот имитатор содержит устройство управления имитацией сигналов (УУИС), первый, второй и третий входы которого являются входами текущей дальности, текущего азимута и текущей ошибки сопровождения цели соответственно, последовательно включенные генератор зондирующего сигнала (ГЗС), амплитудно-импульсный модулятор (АИМ), управляемый аттенюатор (У А) и задатчик положения ЭЦП (ЗПЭЦП), последовательно включенные управляемый элемент задержки (УЭЗ), сигнальный вход которого является входом синхронизации имитатора, а управляющий вход соединен с первым выходом УУИС, и управляемый регулятор длительности импульсов (УРДИ), управляющий вход которого соединен со вторым выходом УУИС, а выход - с управляющим входом АИМ, последовательно включенные первый усилитель, вход которого соединен с первым выходом ЗПЭЦП, и первый излучатель, а также последовательно включенные второй усилитель, вход которого соединен со вторым выходом ЗПЭЦП, и второй излучатель, при этом третий, четвертый и пятый выходы УУИС соединены соответственно с управляющим входом УА, первым и вторым управляющими входами ЗПЭЦП.
Признаками прототипа, совпадающими с существенными признаками заявляемого имитатора, являются все перечисленные элементы прототипа. При этом совокупность ГЗС, АИМ, УЭЗ и УРДИ образует ФЗС.
В имитаторе-прототипе механическое перемещение ЭЦП заменено электронным, что значительно упрощает имитатор и уменьшает его инерционность по сравнению с другими аналогами.
Недостатком этого имитатора, присущим и перечисленным выше аналогам, является относительно низкая достоверность процесса имитации. Этот недостаток обусловлен тем, что отраженный от цели сигнал на входе исследуемого радиолокатора практически всегда существует в комбинации с сигналом, отраженным от находящейся поблизости или непосредственно рядом с имитируемой целью подстилающей поверхности, что в традиционных имитаторах радиолокационных целей не учитывается.
Технической задачей, на решение которой направлено создание изобретения, является повышение достоверности имитации радиолокационной цели.
Для достижения технического результата в имитатор-прототип введены новые элементы и связи, а также некоторые особенности УУИЦ.
Технический результат достигается тем, что в известный имитатор радиолокационной цели, содержащий УУИС, первый, второй и третий входы которого являются входами текущей дальности, текущего азимута и текущей ошибки сопровождения цели соответственно, ГЗС, первый УЭЗ, сигнальный вход которого является входом синхронизации, а управляющий вход соединен с первым выходом УУИС, первый УРДИ, сигнальный вход которого соединен с выходом первого УЭЗ, а управляющий вход - со вторым выходом УУИС, первый АИМ, управляющий вход которого соединен с выходом первого УРДИ, последовательно включенные первый УА, управляющий вход которого соединен с третьим выходом УУИС, и ЗПЭЦП, первый и второй управляющие входы которого соединены соответственно с четвертым и пятым выходами УУИС, последовательно включенные первый усилитель, вход которого соединен с первым выходом ЗПЭЦП, и первый излучатель, а также последовательно включенные второй усилитель, вход которого соединен со вторым выходом ЗПЭЦП, и второй излучатель, введены последовательно включенные второй УЭЗ, сигнальный вход которого соединен со входом синхронизации, а управляющий вход - с шестым выходом УУИС, и второй УРДИ, управляющий вход которого соединен со вторым выходом УУИС, делитель мощности, вход которого соединен с выходом ГЗС, а первый выход - со входом первого АИМ, управляемый фазовращатель (УФВ), сигнальный вход которого соединен со вторым выходом делителя мощности, а управляющий вход - с седьмым выходом УУИС, последовательно включенные второй АИМ, сигнальный вход которого соединен с выходом УФВ, а управляющий вход - с выходом второго УРДИ, и второй УА, управляющий вход которого соединен с восьмым выходом УУИС, и сумматор мощности, первый и второй входы которого соединены с выходами соответственно первого АИМ и второго УА, а выход - с сигнальным входом первого УА, при этом УУИС имеет три дополнительных входа и три дополнительных выхода.
Совокупность вновь введенных УФВ, делителя мощности, сумматора мощности, дополнительных УА, УЭЗ, АИМ, УРДИ и их связей, а также особенностей выполнения УУИС не следует явным образом из уровня техники, поэтому предлагаемый имитатор радиолокационной цели следует считать новым и имеющим изобретательский уровень.
Сущность изобретения поясняется чертежами, на которых приведены:
- на фиг.1 - структурная схема предлагаемого имитатора;
- на фиг.2 - структурная схема ЗПЭЦП;
- на фиг.3 - взаимное положение излучателей и исследуемого радиолокатора;
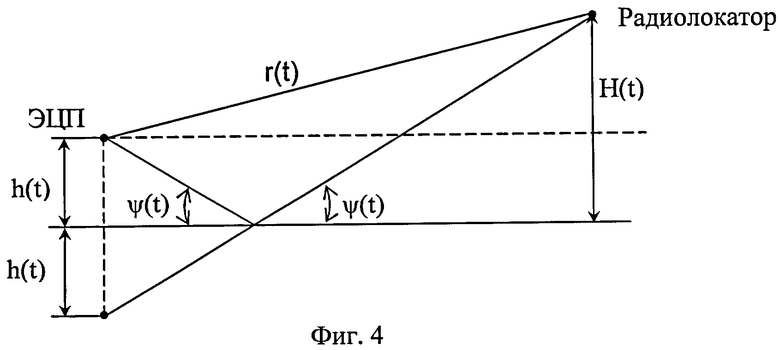
- на фиг.4 - взаимное положение ЭЦП цели, его отражения от подстилающей поверхности и носителя с радиолокатором.
Имитатор радиолокационной цели содержит УУИС 1, ГЗС 2, УЭЗ 3 и 4, делитель 5 мощности, УФВ 6, АИМ 7 и 8, УРДИ 9 и 10, сумматор 11 мощности, 12 и 13, ЗПЭЦП 14, усилители 15 и 16 и излучатели 17 и 18 (фиг.1).
УИСС 1 имеет 6 входов и 8 выходов. Выход ГЗС 2 соединен со входом делителя 5, первый и второй выходы которого соединены с сигнальными входами УФВ 6 и АИМ 8 соответственно. Сигнальные входы УЭЗ 3 и 4 объединены и являются входом синхронизации имитатора, управляющие входы соединены соответственно с первым и шестым выходами УУИС 1, а выходы - с сигнальными входами УРДИ 10 и 9 соответственно. Управляющий вход УФВ 6 соединен с седьмым выходом УУИС 1, а выход - с сигнальным входом АИМ 7, управляющий вход которого соединен с выходом УРДИ 9, а выход - с управляющим входом УА 12. Управляющий вход УРДИ 10 соединен со вторым выходом УУИС 1 и управляющим входом УРДИ 9, а выход - с управляющим входом АИМ 8, выход которого соединен с первым входом сумматора 11. Второй вход сумматора 11 соединен с выходом УА 12, сигнальный вход которого подключен к выходу АИМ, а управляющий вход - к восьмому выходу УУИС 1. Сигнальный вход УА 13 соединен с выходом сумматора 11, управляющий вход - с третьим выходом УУИС 1, а выход - с сигнальным входом ЗПЭЦП 14. Первый и второй управляющие входы ЗПЭЦП 14 соединены соответственно с четвертым и пятым выходами УУИС 1, а первый и второй выходы - с входами усилителей 15 и 16 соответственно, выходы которых подключены к излучателям 17 и 18 соответственно.
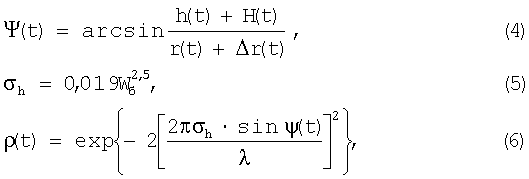
ЗПЭЦП 14 содержит усилитель 19, УА 20 и 23, делитель 21 мощности и регулируемый аттенюатор 22 (фиг.2). Вход усилителя 19 является сигнальным входом ЗПЭЦП 14, а выход соединен с сигнальным входом УА 20, управляющий вход которого является первым управляющим входом ЗПЭЦП 14, а выход соединен с входом делителя 21. Вход аттенюатора 22 подключен к первому выходу делителя 21, а выход является первым выходом ЗПЭЦП 14. Вход УА 23 подключен ко второму выходу делителя 21, а выход является вторым выходом ЗПЭЦП 14.
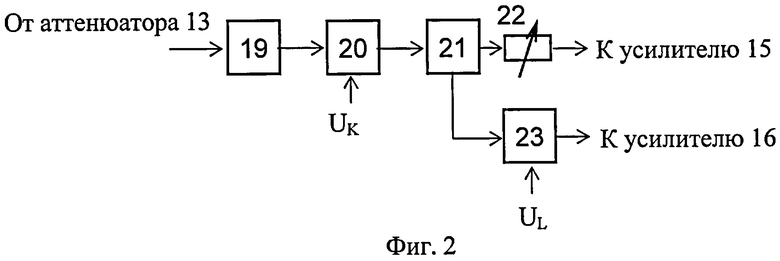
Излучатели 17 и 18 установлены неподвижно на одинаковых расстояниях порядка 10 м от исследуемого радиолокатора и ориентированы в направлении его максимумами излучения (фиг.3). При этом линейная база "а" между центрами раскрыва излучателей 17 и 18 и расстояние rф между ее серединой и точкой установки радиолокатора выбираются такими, что угловой сдвиг Θ центров раскрыва излучателей 17 и 18 друг относительно друга при визировании из точки установки радиолокатора примерно равен ширине Θ0,5 диаграммы направленности антенны (ДНА) последнего.
Имитируется ситуация, когда ЭЦП цели находится на текущей высоте h(t), а радиолокатор и его носитель - на высоте H(t) от подстилающей поверхности, при этом радиолокатор и его носитель находятся на текущей дальности r(t) от ЭЦП цели, а текущий угол скольжения (угол наклона к подстилающей поверхности луча радиолокатора, то есть прямой, соединяющей точку зеркального отражения цели на подстилающей поверхности с точкой нахождения радиолокатора и его носителя) составляет ψ(t) (фиг.4).
Работа имитатора заключается в следующем.
Совокупность ГЗС 2, делителя 5 мощности, АИМ 8, УЭЗ 3 и УРДИ 10 образует ФЗС.
ФЗС формирует СВЧ сигнал, совпадающий по структуре с реальным зондирующим сигналом радиолокатора, но задержанный относительно зондирующего сигнала на нулевой дальности (относительно синхроимпульсов) на время τ3, определяемое из соотношения

где с=3·108 м/с - скорость света;
t - текущее время;
r(t) - текущая дальность цели.
ГЗС 2 вырабатывает непрерывный СВЧ сигнал, частота которого равна несущей частоте зондирующего сигнала исследуемого радиолокатора. С помощью делителя 5 мощности этот сигнал делится пополам. Его первая часть с первого выхода делителя 5 поступает на сигнальный вход АИМ 8, а вторая часть со второго выхода делителя 5 - на сигнальный вход УФВ 6. В АИМ 8 поступивший на его вход сигнал модулируется по амплитуде прямоугольными импульсами, вырабатываемыми УРДИ 10. Длительность модулирующих импульсов равна длительности отраженных от цели импульсов, которая, в свою очередь, зависит от текущей дальности r(t), текущего азимута χ(t) цели, текущей ошибки Δχ(t) сопровождения цели, ее линейных размеров и ширины Θ0,5 ДНА исследуемого радиолокатора. УРДИ 10 вырабатывает модулирующие импульсы соответствующей длительности под действием управляющего сигнала Uτи, поступающего на его управляющий вход со второго выхода УУИС 1. Сигнал Uτи формируется в УУИС 1 с учетом текущих значений r(t), χ(t), Δχ(t), поступающих на входы УУИС 1 из измерительного стенда, на котором проводятся исследования радиолокатора.
Модулирующие импульсы формируются из синхроимпульсов, которые через УЭЗ 3 поступают на сигнальный вход УРДИ 10. УЭЗ 3 осуществляет задержку синхроимпульсов на время τ3, которое изменяется в соответствии с уравнением (1) под действием управляющего сигнала  , поступающего на управляющий вход УЭЗ 3 с первого выхода УУИС 1. Сформированный на выходе АИМ 8 СВЧ сигнал поступает на первый вход сумматора 11.
, поступающего на управляющий вход УЭЗ 3 с первого выхода УУИС 1. Сформированный на выходе АИМ 8 СВЧ сигнал поступает на первый вход сумматора 11.
С помощью УФВ 6, АИМ 7, УЭЗ 4 и УРДИ 9 имитируется СВЧ сигнал, отраженный от подстилающей поверхности в точке зеркального отражения от нее ЭЦП цели. В УФВ 6 поступивший на его сигнальный вход СВЧ сигнал сдвигается по фазе на угол, соответствующий разности путей, которые проходят отраженный от подстилающей поверхности и от цели сигналы. Сигнал управления УФВ 6 поступает на его управляющий вход с седьмого выхода УУИС 1, в котором формируется в соответствии с изменением текущей дальности r(t) и текущими высотами h(t) и H(t), поступившими на его первый, четвертый и пятый входы соответственно. Текущий угол Δφ(t) сдвига фаз рассчитывается из соотношений:
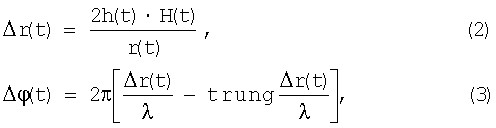
где λ - длина волны зондирующего сигнала,
trung (X) - целая часть числа X.
Сдвинутый по фазе сигнал с выхода УФВ 6 поступает на сигнальный вход АИМ 7.
АИМ 7 совместно с УЭЗ 4 и УРДИ 9 аналогично соответствующим элементам АИМ 8, УЭЗ 3 и УРДИ 10 превращает непрерывный СВЧ сигнал в амплитудно-модулированные прямоугольные радиоимпульсы. Разница лишь в том, что синхроимпульсы поступают через УЭЗ 4, управляемый сигналом с шестого выхода УУИС 1, на котором формируется сигнал, соответствующий задержке в пути отраженного от подстилающей поверхности сигнала, превышающий текущую дальность r(t) на величину Δr(t), определяемую уравнением (2). Сформированный в АИМ 7 сигнал поступает на сигнальный вход УА12.
На управляющий вход УА 12 поступает сигнал Uρ с восьмого выхода УУИС1, соответствующий коэффициенту ρ(t) отражения зондирующего сигнала от подстилающей поверхности. Коэффициент ρ(t) и управляющее напряжение Uρ рассчитываются в УУИС 1. Коэффициент ρ(t) отражения изменяется во времени в соответствии с изменением текущих высот h(t), H(t) и волнения моря Wб, поступающих соответственно на четвертый, пятый и шестой входы УУИС1. Коэффициент ρ(t) отражения рассчитывается по формулам:
где σh - среднее квадратическое отклонение высоты морских волн;
Wб - волнение моря в баллах.
В УА 12 поступившие на его сигнальный вход радиоимпульсы модулируются по амплитуде в соответствии с изменением коэффициента ρ(t) отражения. В результате на выходе УА 12 формируется радиосигнал, полностью соответствующий реальному отраженному от подстилающей поверхности сигналу: его амплитуда составляет величину ρ(t) от амплитуды прямого отраженного от цели сигнала, по фазе они различаются на величину Δφ(t), определяемую формулой (3), а задержка превышает задержку прямого отраженного от цели сигнала на величину, соответствующую разности Δr(t) путей отраженного от подстилающей поверхности и прямого отраженного от цели сигналов. Этот сигнал поступает на второй вход сумматора 11.
В сумматоре 11 поступившие на его входы сигналы суммируются, и на выходе последнего формируется сигнал, соответствующий по частоте радиолокационному (отраженному от цели) сигналу в окружении сигнала, отраженного от подстилающей поверхности. Этот сигнал поступает на сигнальный вход УА 13.
В УА 13 осуществляется амплитудная модуляция поступившего на его вход сигнала в соответствии с амплитудными флюктуациями ЭПР корабля, текущей дальностью r(t), текущей ошибкой Δχ(t) сопровождения корабля и ДНА исследуемого радиолокатора. Управляющий сигнал Ua для осуществления указанной модуляции формируется в УИСС1 и поступает с его третьего выхода на управляющий вход УА 13.
Промодулированный по амплитуде сигнал с выхода УА 13, соответствующий по частоте и амплитуде отраженному от цели сигналу в окружении сигнала, отраженного от подстилающей поверхности, поступает на сигнальный вход ЗПЭЦП 14.
ЗПЭЦП 14 является, по существу, управляемым делителем мощности. Он распределяет мощность поступающего на его вход СВЧ сигнала в отношении, обеспечивающем такое смещение энергетического центра излучения (ЭЦИ) излучателей 17 и 18 относительно середины базы "а" (фиг.3), при котором угловое отклонение ЭЦИ излучателей 17 и 18 относительно середины базы "а" при визировании их из точки установки исследуемого радиолокатора будет таким же, как и угловое отклонение ЭЦП цели от ее геометрического центра. Для этого мощности P1 и Р2 сигналов на первом и втором выходах ЗПЭЦП 14, с одной стороны, в сумме должны быть равны входной мощности ЗПЭЦП 14, а с другой - должны удовлетворять условию

где γ - угловое отклонение ЭЦП корабля от его геометрического центра в плоскости пеленгования (в плоскости наведения).
Указанное распределение мощности поступившего на сигнальный вход ЗПЭЦП 14 сигнала осуществляется следующим образом.
Поступивший на сигнальный вход ЗПЭЦП 14 СВЧ сигнал усиливается усилителем 19 и через УА 20 поступает на вход делителя мощности 21. Делитель мощности 21 делит поступивший на его вход сигнал на две равные части, первая из которых через регулируемый аттенюатор 22 поступает на первый выход ЗПЭЦП 14, а вторая - через УА 23 поступает на второй выход ЗПЭЦП 14. Затухание регулируемого аттенюатора 22 устанавливается ручной регулировкой на уровне порядка 30 дБ. Затухание УА 23 может изменяться в пределах порядка 10…50дБ под действием управляющего сигнала UL, который формируется в УУИС 1 с учетом уравнения (7) и поступает с его пятого выхода через второй управляющий вход ЗПЭЦП 14 на управляющий вход УА 23. Усилитель 19 совместно с управляемым аттенюатором 20 предназначен для поддержания равенства суммы P1 и P2 мощностей сигналов на выходах ЗПЭЦП 14 равной мощности входного СВЧ сигнала ЗПЭЦП 14 путем соответствующего управления затуханием УА 20 при изменении затухания УА 23. Компенсирующий управляющий сигнал Uк формируется в УУИС1 с учетом управляющего сигнала UL и поступает с его четвертого выхода через первый управляющий вход ЗПЭЦП 14 на управляющий вход УА 20.
Сформированные на первом и втором выходах ЗПЭЦП 14 сигналы усиливаются идентичными усилителями 15 и 16 соответственно и с помощью идентичных излучателей 17 и 18 соответственно излучаются в направлении исследуемого радиолокатора.
В результате, на входе исследуемого радиолокатора формируется СВЧ сигнал, совпадающий по структуре и уровню с реальным отраженным от цели сигналом. При этом за счет управления УА 13 воспроизводятся изменения мощности этого сигнала за счет изменения текущей дальности r(t),текущей ошибки Δχ(t) сопровождения цели радиолокатором и амплитудных флюктуации ЭПР цели, а за счет управления ЗПЭЦП 14 воспроизводятся угловые флюктуации ЭЦП корабля.
Нетрудно видеть, что в предлагаемом имитаторе воспроизведение сигнала цели осуществляется в сопровождении сигнала, отраженного от подстилающей поверхности в отличие от имитатора-прототипа, где наличие сигнала, отраженного от подстилающей поверхности, совершенно не учитывается, хотя на практике в случае низковысотных целей, а также целей, передвигающихся по земной или водной поверхности, оно всегда имеет место.
Таким образом, техническим результатом, достигаемым в предлагаемом имитаторе, является повышение достоверности имитации за счет имитации отраженного от подстилающей поверхности сигнала.
Заявляемый имитатор может быть достаточно легко реализуем.
В качестве УУИС 1 может служить ПЭВМ типа "Pentium", дополненная элементами сопряжения с радиочастотной частью имитатора. В качестве ГЗС 2 может быть использован стандартный СВЧ-генератор типа Г4-114. УЭЗ 3 и 4 и УРДИ 9 и 10 могут быть выполнены на цифровых интегральных микросхемах серий 530, 533,1534. В качестве делителей 5 и 21, сумматора 11 и регулируемого аттенюатора 22 могут быть использованы пассивные микросборки. УФВ 6 может быть реализован на основе цифрового запоминания частоты с последующим воспроизведением. В качестве АИМ 7 и 8 могут быть использованы управляемые ключи на pin-диодах. В качестве УА 12,13,20 и 23 могут служить цифровые аттенюаторы с драйверами. В качестве усилителей 15,16 и 19 могут служить полупроводниковые усилители типа М42135. В качестве излучателей 17 и 18 могут служить рупорные антенны.
Имитатор может найти применение в моделирующих комплексах для исследования процессов функционирования радиолокационных систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2006 |
|
RU2317563C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 1979 |
|
SU1840948A1 |
| ИМИТАТОР ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2449308C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОГО ВЫСОКОЧАСТОТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО ДОПЛЕРОВСКОГО СИГНАЛА | 2010 |
|
RU2469348C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2014 |
|
RU2568899C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2011 |
|
RU2504799C2 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |
Изобретение относится к радиолокации и может быть использовано для исследования процессов обнаружения и сопровождения флюктуирующих целей при взаимном перемещении целей и радиолокатора. Имитатор содержит определенным образом соединенные между собой устройство управления имитацией сигналов, генератор зондирующего сигнала, управляемые элементы задержки, делитель мощности, управляемый фазовращатель, амплитудно-импульсные модуляторы, управляемые регуляторы длительности импульсов, сумматор мощности, аттенюаторы, задатчик положения энергетического центра переизлучения, усилители излучатели, дополнительно введенные элемент задержки, делитель мощности, фазовращатель, амплитудно-импульсный модулятор, регулятор длительности импульсов, сумматор мощности и аттенюатор. Достигаемый технический результат - повышение достоверности имитации за счет имитации отраженного от подстилающей поверхности сигнала. 4 ил.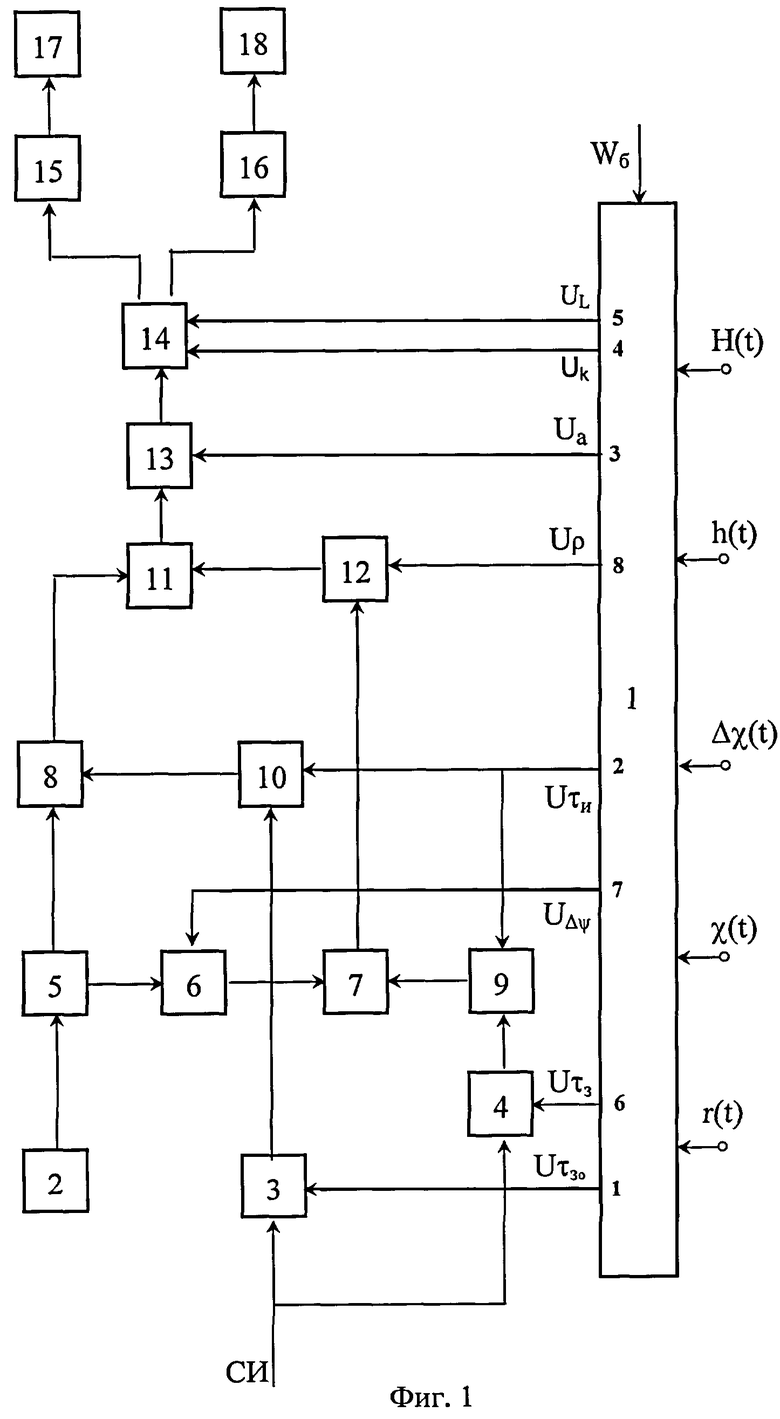
Имитатор радиолокационной цели, содержащий устройство управления имитацией сигналов, первый, второй и третий входы которого являются входами текущей дальности, текущего азимута и текущей ошибки сопровождения цели соответственно, генератор зондирующего сигнала, первый управляемый элемент задержки, сигнальный вход которого является входом синхронизации, а управляющий вход соединен с первым выходом устройства управления имитацией сигналов, предназначенным для управления задержкой синхроимпульсов, первый управляемый регулятор длительности импульсов, сигнальный вход которого соединен с выходом первого управляемого элемента задержки, а управляющий вход - со вторым выходом устройства управления имитацией сигналов, предназначенным для управления первым управляемым регулятором длительности импульсов, первый амплитудно-импульсный модулятор, управляющий вход которого соединен с выходом первого управляемого регулятора длительности импульсов, последовательно включенные первый управляемый аттенюатор, управляющий вход которого соединен с третьим выходом устройства управления имитацией сигналов, предназначенным для управления первым управляемым аттенюатором, и задатчик положения энергетического центра переизлучения, первый и второй управляющие входы которого соединены соответственно с четвертым и пятым выходами устройства управления имитацией сигналов, предназначенными для управления мощностью сигнала на выходе задатчика положения энергетического центра переизлучения и для управления положением энергетического центра переизлучения корабля соответственно, последовательно включенные первый усилитель, вход которого соединен с первым выходом задатчика положения энергетического центра переизлучения, и первый излучатель, а также последовательно включенные второй усилитель, вход которого соединен со вторым выходом задатчика положения энергетического центра переизлучения, и второй излучатель, отличающийся тем, что в него введены второй управляемый элемент задержки, сигнальный вход которого соединен с входом синхронизации, а управляющий вход - с шестым выходом устройства управления имитацией сигналов, предназначенным для управления вторым управляемым элементом задержки, и второй управляемый регулятор длительности импульсов, управляющий вход которого соединен со вторым выходом устройства управления имитацией сигналов, а сигнальный вход соединен с выходом второго управляемого элемента задержки, делитель мощности, вход которого соединен с выходом генератора зондирующего сигнала, а первый выход - с входом первого амплитудно-импульсного модулятора, управляемый фазовращатель, сигнальный вход которого соединен со вторым выходом делителя мощности, а управляющий вход - с седьмым выходом устройства управления имитацией сигналов, предназначенным для управления разностью фаз между отраженными от цели и от подстилающей поверхности сигналами в соответствии с изменением текущей дальности цели и текущими высотами цели и носителя радиолокатора от подстилающей поверхности, последовательно включенные второй амплитудно-импульсный модулятор, сигнальный вход которого соединен с выходом управляемого фазовращателя, а управляющий вход - с выходом второго управляемого регулятора длительности импульсов, и второй управляемый аттенюатор, управляющий вход которого соединен с восьмым выходом устройства управления имитацией сигналов, предназначенным для управления коэффициентом отражения имитируемого сигнала от подстилающей поверхности, и сумматор мощности, первый и второй входы которого соединены с выходами соответственно первого амплитудно-импульсного модулятора и второго управляемого аттенюатора, а выход - с сигнальным входом первого управляемого аттенюатора, при этом устройство управления имитацией сигналов имеет три дополнительных входа, являющихся входами сигналов, соответствующих текущей высоте цели, текущей высоте носителя радиолокатора от подстилающей поверхности и уровню волнения моря соответственно, и три дополнительных выхода.
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2006 |
|
RU2317563C1 |
| Челнок для трубчатых початков автоматических ткацких станков | 1947 |
|
SU82345A1 |
| СПОСОБ ИМИТАЦИИ ЦЕЛИ И ЕЕ ИМИТАТОР В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2234107C1 |
| СТАНЦИЯ РЕТРАНСЛЯЦИОННОГО ТИПА ОДНОКРАТНЫХ ИМИТИРУЮЩИХ ПОМЕХ ДОПЛЕРОВСКИМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2001 |
|
RU2177160C1 |
| US 3732568 A, 08.05.1973 | |||
| EP 1960807 A1, 27.08.2008 | |||
| СМАЗОЧНОЕ МАСЛО ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
RU2012592C1 |
| US 2005195884 A1, 08.09.2005. | |||

