Изобретение относится к вычислительной и радиотехнике и может быть использовано при исследованиях и разработке вычислительных систем и моноимпульсных радиолокационных систем, а также для обучения и тренировки операторов вычислительных и радиолокационных станций с использованием замены реальных радиолокационных станций имитируемыми.
Известен имитатор радиолокационной цели, защищенный патентом РФ №2317563, кл. G01S 7/40, 2006. Он содержит блок управления имитацией радиолокационного сигнала, генератор зондирующего сигнала, амплитудно-импульсные модуляторы, управляемые элементы задержки, управляемые аттенюаторы, задатчик положения энергетического центра переизлучения цели, управляемые регуляторы длительности импульсов, усилители и излучатели. Признаками, общими с заявляемым имитатором, в этом аналоге являются блок управления имитацией радиолокационного сигнала, управляемый элемент задержки, управляемые аттенюаторы, усилители и генератор зондирующего сигнала.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является сложность его реализации. Она обусловлена тем, что этот имитатор работает на реальной сверхвысокой частоте с излучением по открытому пространству. Другой причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является отсутствие в этом аналоге возможности имитировать отраженный от цели сигнал в условиях помех.
Известен также имитатор радиолокационной цели, защищенный авторским свидетельством СССР №544288, кл. G01S 7/40, 1972. Он содержит синхронизатор, блок управления имитацией радиолокационного сигнала, генератор зондирующего сигнала, управляемый генератор шума, управляемые аттенюаторы, усилители и датчик диаграммы направленности антенны радиолокационной станции. Все перечисленные элементы этого имитатора, кроме датчика диаграммы направленности антенны, входят и в состав заявляемого имитатора.
Этот имитатор работает на промежуточной частоте радиолокационной станции, поэтому он значительно проще в реализации, чем имитатор, защищенный патентом РФ №2317563. Он позволяет имитировать отраженный от цели сигнал как в отсутствие помех, так и при воздействии заградительных шумовых помех.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, являются существенно ограниченные функциональные возможности этого аналога. Он не позволяет формировать сигнал по разностным каналам (азимуту и углу места) для моноимпульсных радиолокационных станций, не позволяет имитировать низкочастотные флюктуации эффективной поверхности рассеяния цели, доплеровское смещение частоты отраженного от цели сигнала и узкополосную доплеровскую помеху.
Наиболее близким по технической сущности к заявляемому (прототипом) является имитатор радиолокационной цели, представляющий собой часть имитатора радиолокационных сигналов, защищенного патентом РФ №2066459, кл. G01S 7/40, 1982. Он содержит синхронизатор, блок управления имитацией радиолокационного сигнала, два частотных модулятора, два генератора псевдослучайных сигналов, два фильтра нижних частот, формирователь подвижных стробов, блок стробирования, четыре управляемых аттенюатора, амплитудный модулятор, управляемый генератор шума, первый фазовый коммутатор, второй фазовый коммутатор, сумматор и три усилителя. Все перечисленные элементы имитатора-прототипа, кроме второго генератора псевдослучайного сигнала, второго фильтра нижних частот и амплитудного модулятора, входят и в состав заявляемого имитатора.
Имитатор-прототип работает на промежуточной частоте радиолокационной станции. Он обеспечивает формирование сигнала радиолокационной цели по азимутальному и угломестному каналам для моноимпульсной радиолокационной станции. При этом учитываются доплеровский сдвиг частоты отраженного от цели сигнала и низкочастотные флюктуации эффективной отражающей поверхности цели. Имитатор позволяет имитировать отраженный от цели сигнал как в отсутствие помех, так и при воздействии заградительной шумовой помехи или (и) узкополосной доплеровской помехи.
Причиной, препятствующей достижению в имитаторе-прототипе технического результата, достигаемого в изобретении, является относительно низкая достоверность имитации радиолокационного сигнала. Она обусловлена тем, что при имитации отраженного от цели сигнала в условиях узкополосной доплеровской помехи, источник которой совмещен с целью, соотношение между мощностями помехи и отраженного сигнала в процессе взаимного перемещения цели и радиолокационной станции остается постоянным. Фактически же это соотношение изменяется, так как мощность помехи в этом случае изменяется пропорционально дальности "цель - радиолокационная станция", а мощность отраженного от цели сигнала - пропорционально квадрату этой дальности. Кроме того, в имитаторе формируемая узкополосная доплеровская помеха, как и отраженный от цели сигнал, наделяется низкочастотными флюктуациями амплитуды, совпадающими с флюктуациями, присущими флюктуациям эффективной поверхности рассеяния цели. В реальной же аппаратуре узкополосная доплеровская помеха такой модуляцией не наделяется. Кроме того, в имитаторе-прототипе при имитации отраженного от цели сигнала совершенно не учитываются отражения облучающего цель сигнала от находящейся вблизи цели подстилающей поверхности. Это обстоятельство является дополнительной причиной низкой достоверности имитации радиолокационной цели.
Технической задачей, на решение которой направлено создание изобретения, является повышение достоверности имитации радиолокационной цели.
Технический результат достигается тем, что в известный имитатор радиолокационной цели введены последовательно включенные третий частотный модулятор, сигнальный вход которого соединен со вторым входом имитатора, а вход управления - с одиннадцатым выходом блока управления имитацией радиолокационного сигнала, элемент управляемой задержки, вход управления которого соединен с двенадцатым выходом блока управления имитацией радиолокационного сигнала, второй блок стробирования и пятый управляемый аттенюатор, вход управления которого соединен с тринадцатым выходом блока управления имитацией радиолокационного сигнала, а выход - с третьим входом сумматора, второй вход которого соединен с выходом первого управляемого аттенюатора, шестой управляемый аттенюатор, а также второй формирователь подвижных стробов, вход которого соединен с четырнадцатым выходом блока управления имитацией радиолокационного сигнала, а выход - со входом управления второго блока стробирования, при этом сигнальный вход первого блока стробирования соединен с выходом первого частотного модулятора, сигнальный вход шестого управляемого аттенюатора соединен с выходом второго частотного модулятора, вход управления - с пятнадцатым выходом блока управления имитацией радиолокационного сигнала, а выход - с четвертым входом сумматора.
Для достижения технического результата в известный имитатор радиолокационной цели, содержащий последовательно включенные синхронизатор, вход которого является первым входом имитатора, и блок управления имитацией радиолокационного сигнала, последовательно включенные первый частотный модулятор, сигнальный вход которого является вторым входом имитатора, а вход управления соединен с первым выходом блока управления имитацией радиолокационного сигнала, и второй частотный модулятор, последовательно включенные генератор псевдослучайного сигнала, вход которого соединен со вторым выходом блока управления имитацией радиолокационного сигнала, и фильтр нижних частот, выход которого соединен со входом управления второго частотного модулятора, формирователь подвижных стробов, вход которого соединен с третьим выходом блока управления имитацией радиолокационного сигнала, последовательно включенные блок стробирования, вход управления которого соединен с выходом формирователя подвижных стробов, и первый управляемый аттенюатор, вход управления которого соединен с четвертым выходом блока управления имитацией радиолокационного сигнала, сумматор, последовательно включенные управляемый генератор шума, вход которого соединен с пятым выходом блока управления имитацией радиолокационного сигнала, и второй управляемый аттенюатор, вход управления которого с шестым выходом блока управления имитацией радиолокационного сигнала, а выход - с первым входом сумматора, первый усилитель, вход которого соединен с выходом сумматора, а выход является первым выходом имитатора, последовательно включенные первый фазовый коммутатор, сигнальный вход которого соединен с выходом сумматора, а вход управления - с седьмым выходом блока управления имитацией радиолокационного сигнала, третий управляемый аттенюатор, вход управления которого соединен с восьмым выходом блока управления имитацией радиолокационного сигнала, и второй усилитель, выход которого является вторым выходом имитатора, и последовательно включенные второй фазовый коммутатор, сигнальный вход которого соединен с выходом сумматора, а вход управления - с девятым выходом блока управления имитацией радиолокационного сигнала, четвертый управляемый аттенюатор, вход управления которого соединен с десятым выходом блока управления имитацией радиолокационного сигнала, и третий усилитель, выход которого является третьим выходом имитатора, введены последовательно включенные третий частотный модулятор, сигнальный вход которого соединен со вторым входом имитатора, а вход управления - с одиннадцатым выходом блока управления имитацией радиолокационного сигнала, элемент управляемой задержки, вход управления которого соединен с двенадцатым выходом блока управления имитацией радиолокационного сигнала, второй блок стробирования и пятый управляемый аттенюатор, вход управления которого соединен с тринадцатым выходом блока управления имитацией радиолокационного сигнала, а выход - с третьим входом сумматора, второй вход которого соединен с выходом первого управляемого аттенюатора, шестой управляемый аттенюатор, а также второй формирователь подвижных стробов, вход которого соединен с четырнадцатым выходом блока управления имитацией радиолокационного сигнала, а выход - со входом управления второго блока стробирования, при этом сигнальный вход первого блока стробирования соединен с выходом первого частотного модулятора, сигнальный вход шестого управляемого аттенюатора соединен с выходом второго частотного модулятора, вход управления - с пятнадцатым выходом блока управления имитацией радиолокационного сигнала, а выход - с четвертым входом сумматора.
Сущность изобретения поясняется чертежом, на котором на фиг.1 приведена структурная схема заявляемого имитатора.
Имитатор движущихся объектов содержит синхронизатор 1, блок 2 управления имитацией сигналов, частотные модуляторы 3.1, 3.2 и 3.3, генератор 4 псевдослучайного сигнала, фильтр 5 нижних частот, формирователи 6.1 и 6.2 подвижных стробов, блоки 7.1 и 7.2 стробирования, управляемые аттенюаторы 8.1÷8.6, управляемый генератор 9 шума, управляемый элемент 10 задержки, сумматор 11, фазовые коммутаторы 12.1 и 12.2 и усилители 13.1, 13.2 и 13.3 промежуточной частоты.
Вход синхронизатора 1 является первым входом имитатора, а выход соединен со входом блока 2. Модулятор 3.1, сигнальный вход которого является вторым входом имитатора, блок 7.1 и аттенюатор 8.1 соединены последовательно. Вход управления модулятора 3.1 соединен с первым выходом блока 2, вход управления блока 7.1 через формирователь 6.1 соединен с третьим выходом блока 2, а вход управления аттенюатора 8.1 соединен с четвертым выходом блока 2. Первый вход сумматора 11 соединен с выходом аттенюатора 8.2, сигнальный вход которого соединен с выходом генератора 9, а вход управления - с шестым выходом блока 2, подключенного своим пятым выходом ко входу управления этого генератора. Второй вход сумматора 11 соединен с выходом аттенюатора 8.1. Модулятор 3.2, сигнальный вход которого является вторым входом имитатора, элемент 10, блок 7.2 и аттенюатор 8.5, выход которого соединен с третьим входом сумматора 11, соединены последовательно. Входы управления модулятора 3.2, элемента 10 и аттенюатора 8.5 соединены соответственно с одиннадцатым, двенадцатым и тринадцатым выходами блока 2, а вход управления блока 7.2 соединен с выходом формирователя 6.2, вход которого соединен с четырнадцатым выходом блока 2. Сигнальный вход модулятора 3.2 соединен с выходом модулятора 3.1, вход управления - с выходом фильтра 5.1, а выход - с сигнальным входом аттенюатора 8.6, вход управления которого соединен с пятнадцатым выходом блока 2, а выход - с четвертым входом сумматора 11. Вход управления генератора 4 соединен со вторым выходом блока 2, а выход - со входом фильтра 5. Вход усилителя 13.1 соединен с выходом сумматора 11 и сигнальными входами коммутаторов 12.1 и 12.2, а выход является первым выходом имитатора. Коммутатор 12.1, аттенюатор 8.3 и усилитель 13.2, выход которого является вторым выходом имитатора, соединены последовательно. Входы управления коммутатора 12.1 и аттенюатора 8.3 соединены соответственно с седьмым и восьмым выходами блока 2. Коммутатор 12.2, аттенюатор 8.4 и усилитель 13.3, выход которого является третьим выходом имитатора, соединены последовательно. Входы управления коммутатора 12.2 и аттенюатора 8.4 соединены соответственно с девятым и десятым выходами блока 2.
Работа имитатора заключается в следующем.
Имитируемый радиолокационный сигнал формируется в виде двух составляющих - отраженного непосредственно от облученной цели сигнала и сопутствующего ему сигнала, отраженного от подстилающей поверхности, находящейся вблизи от цели. Кроме того, в состав имитируемого сигнала могут входить узкополосная доплеровская помеха и (или) заградительная шумовая помеха.
Формирование сигнала имитируемой цели осуществляется на реальной промежуточной частоте радиолокационной станции (РЛС).
От РЛС на первый вход имитатора и далее через синхронизатор на вход блока 2 поступают импульс начала зондирования и параметры зондирующего импульса, а также координаты электрической оси антенны РЛС. Блок 2 представляет собой вычислитель, в котором рассчитываются все сигналы управления имитацией радиолокационного сигнала.
Отраженный непосредственно от имитируемой цели сигнал формируется с помощью модулятора 3.1, формирователя 6.1, блока 7.1 стробирования и аттенюатора 8.1. Со второго входа имитатора на сигнальные входы модуляторов 3.1 и 3.2 от РЛС поступает зондирующий сигнал промежуточной частоты. В модуляторе 3.1 осуществляется доплеровский сдвиг этой частоты на величину, пропорциональную скорости сближения РЛС с целью. Величина доплеровского сдвига, соответствующего скорости сближения РЛС с целью, поступает на вход управления модулятора 3.1 с первого выхода блока 2. Сформированный модулятором 3.1 сигнал с его выхода поступает на сигнальные входы модулятора 3.2 и блока 7.1 стробирования. Формирователь 6.1 генерирует видеоимпульс, задержанный относительно зондирующего импульса РЛС на время, пропорциональное дальности "РЛС - имитируемая цель", которая поступает на вход формирователя 6.1 в виде соответствующего кода с третьего выхода блока 2. Сформированный формирователем 6.1 видеоимпульс поступает на вход управления блока 7.1 стробирования, в котором поступивший на его сигнальный вход непрерывный сигнал промежуточной частоты с соответствующим доплеровским сдвигом преобразуется в импульсный радиосигнал. Сформированный блоком 7.1 стробирования импульсный радиосигнал поступает на сигнальный вход аттенюатора 8.1. На вход управления этого аттенюатора с четвертого выхода блока 2 поступает сигнал управления мощностью отраженного от цели сигнала. Этот сигнал формируется с учетом основных факторов, влияющих на эту мощность:
- мощности передатчика РЛС;
- положения электрической оси антенны РЛС;
- коэффициента усиления и диаграммы направленности антенны РЛС;
- дальности "РЛС - цель";
- эффективной поверхности рассеяния цели и ее низкочастотных флюктуации.
Под действием управляющего сигнала с четвертого выхода блока 2 аттенюатор 8.1 изменяет мощность сигнала на своем выходе в соответствии с реальными изменениями мощности отраженного от цели сигнала на выходе антенны РЛС при работе ее на прием. Сигнал с выхода аттенюатора 8.1 поступает на второй вход сумматора 11.
Имитация сигнала, отраженного от подстилающей поверхности, осуществляется с помощью модулятора 3.2, элемента 10 задержки, формирователя 6.2, блока 7.2 стробирования и аттенюатора 8.5 Поступивший на сигнальный вход модулятора 3.2 зондирующий сигнал промежуточной частоты от РЛС сдвигается по частоте в этом модуляторе на величину доплеровского сдвига, пропорциональную скорости сближения РЛС с точкой зеркального отражения цели от подстилающей поверхности. Указанный доплеровский сдвиг осуществляется под действием управляющего сигнала, поступающего на вход управления модулятора 3.2 с одиннадцатого выхода блока 2. Управляющий сигнал рассчитывается в блоке 2 на основании информации о изменяющемся взаимном положении РЛС, цели и ее зеркального отражения от подстилающей поверхности. Сформированный модулятором 3.2 сигнал через управляемый элемент 10 задержки поступает на сигнальный вход блока 7.2 стробирования. В элементе 10 поступивший на его вход сигнал промежуточной частоты с соответствующим доплеровским сдвигом задерживается на время, соответствующее разности путей, пройденных сигналами, отраженными непосредственно от цели и от ее зеркального отражения от подстилающей поверхности. Указанная задержка осуществляется под действием управляющего сигнала, поступающего на вход управления элемента 10 с двенадцатого выхода блока 2. Управляющий сигнал, как и сигнал на одиннадцатом выходе блока 2, рассчитывается в этом блоке на основании информации об изменяющемся взаимном положении РЛС, цели и ее зеркального положения относительно подстилающей поверхности. В результате указанной задержки сигнал на выходе элемента 10 и сигнальном входе блока 7.2 стробирования получает такой же дополнительный фазовый сдвиг, как и реальный отраженный от подстилающей поверхности сигнал. С помощью формирователя 6.2 и блока 7.2 стробирования поступивший на сигнальный вход блока 7.2 сигнал промежуточной частоты преобразуется в импульсный радиосигнал. Механизм функционирования формирователя 6.2 и блока 7.2 аналогичен механизму функционирования формирователя 6.1 и блока 7.1. Разница лишь в том, что управляющий сигнал формируется на четырнадцатом выходе блока 2 и формирователь 6.2 генерирует видеоимпульс, задержанный относительно зондирующего импульса РЛС на время, пропорциональное пути "имитируемая цель - точка отражения на подстилающей поверхности - РЛС". Сформированный блоком 7.2 стробирования импульсный радиосигнал поступает на сигнальный вход аттенюатора 8.5. На вход управления этого аттенюатора с тринадцатого выхода блока 2 поступает сигнал управления мощностью отраженного от подстилающей поверхности сигнала. Этот сигнал формируется с учетом основных факторов, влияющих на эту мощность:
- мощности передатчика РЛС;
- положения электрической оси антенны РЛС;
- коэффициента усиления и диаграммы направленности антенны РЛС;
- длины пути отраженного от подстилающей поверхности сигнала "имитируемая цель - точка ее отражения от подстилающей поверхности - РЛС".
- коэффициента отражения от подстилающей поверхности;
- угла скольжения (угла между подстилающей поверхностью и направлением "РЛС - точка отражения от подстилающей поверхности".
Под действием управляющего сигнала с тринадцатого выхода блока 2 аттенюатор 8.5 изменяет мощность сигнала на своем выходе в соответствии с реальными изменениями мощности отраженного от подстилающей поверхности сигнала на выходе антенны РЛС при работе ее на прием. Сигнал с выхода аттенюатора 8.5 поступает на третий вход сумматора 11.
Имитация узкополосной доплеровской помехи осуществляется с помощью генератора 4, фильтра 5, модулятора 3.2 и аттенюатора 8.6. Генератор 4 формирует псевдослучайный сигнал, который, проходя фильтр 5 нижних частот, поступает на управляющий вход модулятора 3.2, на сигнальный вход которого с выхода модулятора 3.1 поступает непрерывный сигнал промежуточной частоты с соответствующим скорости сближения имитируемой цели с РЛС доплеровским сдвигом. Модулятор 3.2 осуществляет перенос сформированного генератором 4 и прошедшего через фильтр 5 сигнала помехи на промежуточную частоту РЛС. С выхода модулятора 3.2 сигнал помехи через аттенюатор 8.3 поступает на четвертый вход сумматора 11. Проходя через аттенюатор 8.3, этот сигнал может регулироваться по мощности под действием управляющего сигнала, поступившего на вход управления этого аттенюатора с пятнадцатого выхода блока 2. Включение и выключение генератора 4, а следовательно включение (выключение) узкополосной доплеровской помехи осуществляется по двухуровнему сигналу управления, поступающему со второго выхода блока 2 на вход управления генератора 4.
Имитация заградительной шумовой помехи осуществляется с помощью последовательно включенных генератора 9 и аттенюатора 8.2. Генератор 9 формирует случайный шумовой сигнал с шириной спектра, превышающей полосу пропускания тракта промежуточной частоты подавляемой РЛС, который через аттенюатор 8.2 поступает на первый вход сумматора 11. Энергетический уровень помехи может регулироваться под действием управляющего сигнала, поступающего на вход управления этого аттенюатора с шестого выхода блока 2. Включение и выключение этой помехи осуществляется по двухуровнему сигналу управления, поступающему на вход управления генератора 9 с пятого выхода блока 2.
Сформированные составляющие имитируемого радиолокационного сигнала цели суммируются в сумматоре 11, и результат суммирования с его выхода по трем каналам, имитирующим суммарный и два разностных (азимутальный и угломестный) канала сопровождения цели моноимпульсной РЛС, поступают на выходные усилители 13.1, 13.2 и 13.3 и с них в РЛС. При этом сигнал суммарного канала поступает на вход усилителя 13.1 непосредственно с выхода сумматора 11, а сигналы разностных каналов поступают на усилители 13.2 и 13.3 через фазовые коммутаторы 12.1 и 12.2 и аттенюаторы 8.3 и 8.4 соответственно. На входы управления коммутаторов 12.1 и 12.2 поступают коды, соответствующие знакам сигналов ошибки сопровождения цели соответственно по азимуту и углу места с седьмого и девятого выходов блока 2, а на входы управления аттенюаторов 8.3 и 8.4 - коды, соответствующие величинам ошибок сопровождения цели по азимуту и углу места с восьмого и десятого выходов блока 2. Вычисление этих ошибок осуществляется в блоке 2 на основании информации о координатах цели и направлении электрической оси антенны РЛС.
Таким образом, предлагаемый имитатор как и имитатор-прототип воспроизводит на реальной промежуточной частоте РЛС сигнал радиолокационной цели в условиях узкополосной доплеровской помехи и (или) заградительной шумовой помехи или в отсутствие таковых. При этом как в прототипе, так и в предлагаемом имитаторе воспроизводится как доплеровский сдвиг частоты, так и амплитудные изменения отраженного от цели сигнала, включая низкочастотные флюктуации за счет изменения эффективной поверхности рассеяния имитируемой цели. Нетрудно видеть, что в предлагаемом имитаторе имитация сигнала, отраженного непосредственно от цели, и сигнала узкополосной доплеровской помехи осуществляется практически независимо один от другого, что позволяет устанавливать реальное соотношение между уровнями мощности этих сигналов. Кроме того, в предлагаемом имитаторе воспроизводится не только сигнал, отраженный непосредственно от цели, но и сигнал, отраженный от находящейся вблизи этой цели подстилающей поверхности. Указанные обстоятельства существенно повышают достоверность имитации радиолокационного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2014 |
|
RU2568899C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2011 |
|
RU2504799C2 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОГО ВЫСОКОЧАСТОТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО ДОПЛЕРОВСКОГО СИГНАЛА | 2010 |
|
RU2469348C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |
| Устройство для имитации отраженных радиолокационных сигналов | 1990 |
|
SU1723543A1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2008 |
|
RU2402036C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 1979 |
|
SU1840948A1 |
Имитатор движущихся объектов предназначен для использования при исследованиях и разработке вычислительных систем и моноимпульсных радиолокационных систем, а также для обучения и тренировки операторов вычислительных и радиолокационных станций. Имитатор движущихся объектов содержит синхронизатор, блок управления имитацией сигналов, три частотных модулятора, генератор псевдослучайного сигнала, фильтр нижних частот, два формирователя подвижных стробов, два блока стробирования, шесть управляемых аттенюаторов, управляемый генератор шума, управляемый элемент задержки, сумматор, два фазовых коммутатора и три усилителя промежуточной частоты, определенным образом соединенные между собой. Достигаемый технический результат - повышение достоверности имитации радиолокационной цели. 1 ил.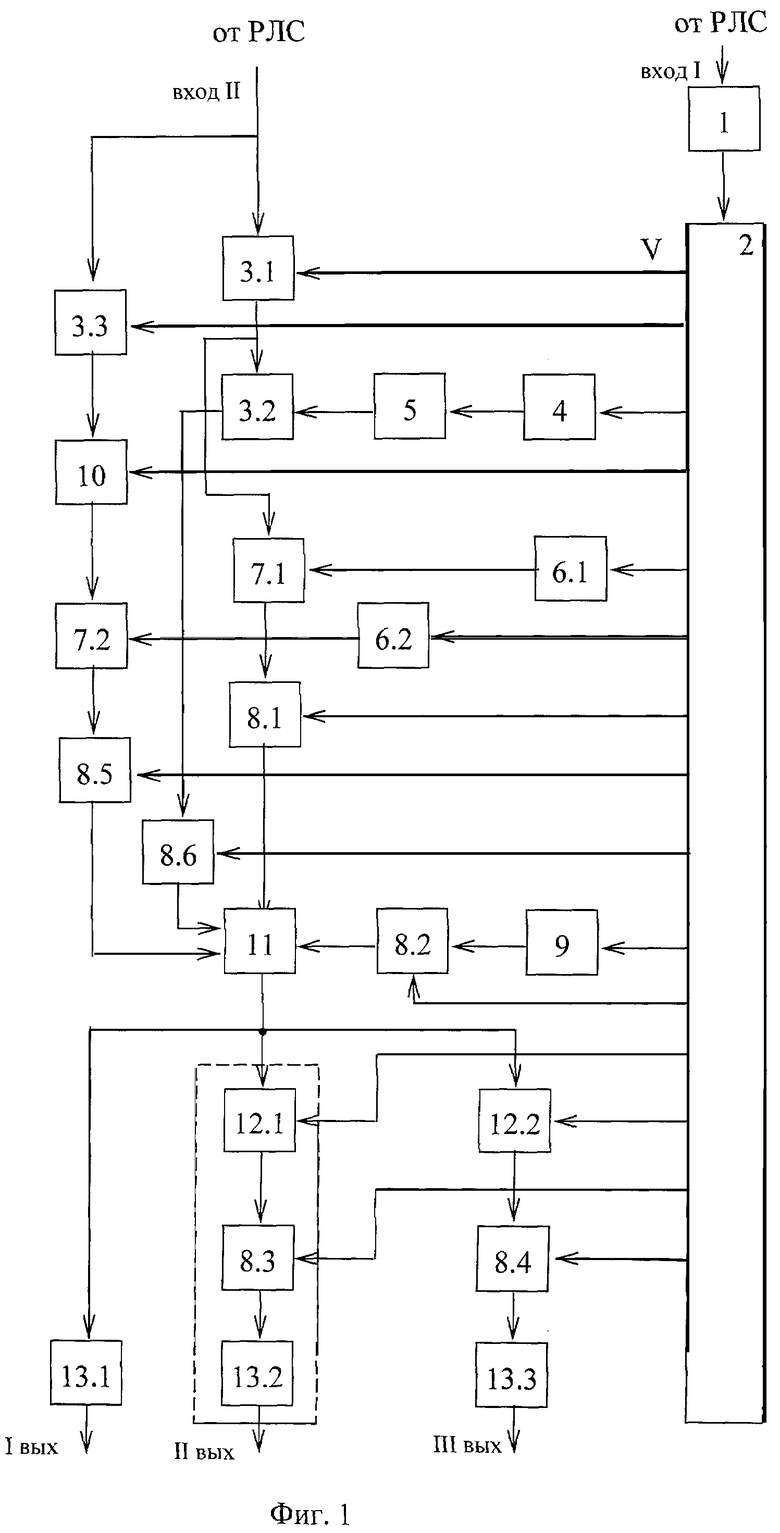
Имитатор движущихся объектов, содержащий последовательно включенные синхронизатор, вход которого является первым входом имитатора, и блок управления имитацией радиолокационного сигнала, последовательно включенные первый частотный модулятор, сигнальный вход которого является вторым входом имитатора, а вход управления соединен с первым выходом блока управления имитацией радиолокационного сигнала, и второй частотный модулятор, последовательно включенные генератор псевдослучайного сигнала, вход которого соединен со вторым выходом блока управления имитацией радиолокационного сигнала, и фильтр нижних частот, выход которого соединен с входом управления второго частотного модулятора, формирователь подвижных стробов, вход которого соединен с третьим выходом блока управления имитацией радиолокационного сигнала, последовательно включенные блок стробирования, вход управления которого соединен с выходом формирователя подвижных стробов, и первый управляемый аттенюатор, вход управления которого соединен с четвертым выходом блока управления имитацией радиолокационного сигнала, сумматор, последовательно включенные управляемый генератор шума, вход которого соединен с пятым выходом блока управления имитацией радиолокационного сигнала, и второй управляемый аттенюатор, вход управления которого соединен с шестым выходом блока управления имитацией радиолокационного сигнала, а выход - с первым входом сумматора, первый усилитель, вход которого соединен с выходом сумматора, а выход является первым выходом имитатора, последовательно включенные первый фазовый коммутатор, сигнальный вход которого соединен с выходом сумматора, а вход управления - с седьмым выходом блока управления имитацией радиолокационного сигнала, третий управляемый аттенюатор, вход управления которого соединен с восьмым выходом блока управления имитацией радиолокационного сигнала, и второй усилитель, выход которого является вторым выходом имитатора, и последовательно включенные второй фазовый коммутатор, сигнальный вход которого соединен с выходом сумматора, а вход управления - с девятым выходом блока управления имитацией радиолокационного сигнала, четвертый управляемый аттенюатор, вход управления которого соединен с десятым выходом блока управления имитацией радиолокационного сигнала, и третий усилитель, выход которого является третьим выходом имитатора, отличающийся тем, что в него введены последовательно включенные третий частотный модулятор, сигнальный вход которого соединен со вторым входом имитатора, а вход управления - с одиннадцатым выходом блока управления имитацией радиолокационного сигнала, элемент управляемой задержки, вход управления которого соединен с двенадцатым выходом блока управления имитацией радиолокационного сигнала, второй блок стробирования и пятый управляемый аттенюатор, вход управления которого соединен с тринадцатым выходом блока управления имитацией радиолокационного сигнала, а выход - с третьим входом сумматора, второй вход которого соединен с выходом первого управляемого аттенюатора, шестой управляемый аттенюатор, а также второй формирователь подвижных стробов, вход которого соединен с четырнадцатым выходом блока управления имитацией радиолокационного сигнала, а выход - со входом управления второго блока стробирования, при этом сигнальный вход первого блока стробирования соединен с выходом первого частотного модулятора, сигнальный вход шестого управляемого аттенюатора соединен с выходом второго частотного модулятора, вход управления - с пятнадцатым выходом блока управления имитацией радиолокационного сигнала, а выход - с четвертым входом сумматора.
| RU 2066459 C1, 10.09.1996 | |||
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2006 |
|
RU2317563C1 |
| Челнок для трубчатых початков автоматических ткацких станков | 1947 |
|
SU82345A1 |
| US 5518400 A, 21.05.1996 | |||
| WO 1998028633 A1, 02.07.1998 | |||
| US 6384771 B1, 07.05.2002. | |||

