Изобретение относится к радиолокации, а именно к устройствам, предназначенным для имитации частотно-временной структуры радиолокационного сигнала, отраженного от подстилающей поверхности, от одной или нескольких целей, находящихся на фиксированном направлении, и может быть использовано, например, для имитации ложных целей и помех для защиты присутствующих целей, для имитации боевой работы радиолокационной системы (РЛС), а также для имитации эхо-сигналов радиовысотомеров (PB) - измерителей высоты полета.
В зависимости от типа сигнала и способов сканирования РЛС оптимальными будут различные методы и алгоритмы формирования имитирующего сигнала. Для РЛС импульсного излучения форма зондирующего сигнала, как правило, постоянна и точно известна, поэтому отраженный сигнал может быть заранее подготовлен в сигнальной памяти с учетом параметров моделирования и выдан на вход РЛС по сигналу пикового детектора, обнаруживающего начало зондирующего импульса. В современных РЛС для защиты от помех могут использовать длительные сигналы с переменными параметрами: периодом и полосой модуляции, длительностью и видом зондирующего сигнала. Поэтому расчет отраженного сигнала и последующее его воспроизведение необходимо выполнять в реальном масштабе времени на основе принимаемой реализации сигнала.
Это приводит к необходимости прямой имитации отраженного сигнала как суммы сигналов, отраженных различными достаточно малыми по сравнению с облучаемой площадью участками поверхности или эквивалентными блестящими точками.
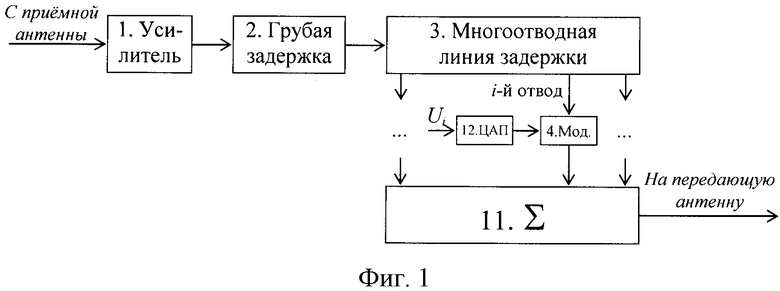
Известно устройство для имитации радиолокационных портретов реальных целей [1, стр. 134-135, рис. 5.2] - фиг. 1, в котором зондирующий импульс от радиолокатора, для которого создается радиолокационный портрет, поступает через приемную антенну, усилитель 1, устройство грубой задержки 2, устройство точной задержки 3, модуляторы набора модуляторов 4 и сумматор 11 на выход имитатора. Устройство грубой задержки 2 осуществляет задержку по времени, соответствующую расстоянию до ближайшей блестящей точки имитируемой цели. Линия задержки с отводами 3 обеспечивает имитацию блестящих точек цели. Амплитудные и фазовые модуляции выполняются в модуляторах набора модуляторов 4 с помощью эталонных сигналов Ui, соответствующих характеристикам целей. С выходов модуляторов 4 сигналы, имитирующие соответствующие блестящие точки, поступают на сумматор 11 и далее в передающую антенну. Наличие ЦАП 12 для управления модуляторами набора модуляторов 4 в виде отдельных блоков является особенностью конкретного аппаратного решения и не принципиально для описания работы и устройства имитатора.
Описанное устройство имитатора по структуре и принципу функционирования соответствует системе увеличения радиочастотного отклика [2], устройству генератора электромагнитной цели [3], методу обмана сонара или радиолокатора и ложной цели, применяющей этот метод [4], методу электронного увеличения радиолокационных целей (техники) [5, 6].
Для повышения качества имитации формирование сигнала целесообразно выполнять в цифровом виде, но при этом возникает необходимость использования сложных в реализации набора модуляторов и цифрового многовходового сумматора.
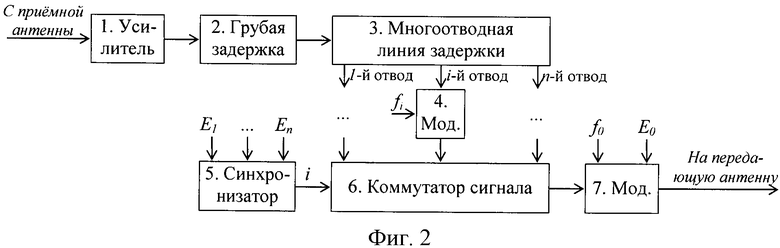
В [7] для исключения многовходового сумматора предложена конструкция имитатора радиолокационной цели - фиг. 2: вместо сумматора имитатор содержит синхронизатор, коммутатор и дополнительный модулятор. Устройство (фиг. 2) работает следующим образом: зондирующий импульс от радиолокатора, для которого создается радиолокационный портрет, поступает через приемную антенну, усилитель 1, устройство грубой задержки 2, устройство точной задержки 3, набор модуляторов частоты (фазы) 4, коммутатор сигнала 6 и дополнительный модулятор 7 на выход имитатора. Устройство грубой задержки 2 осуществляет задержку по времени, соответствующую расстоянию до ближайшей блестящей точки имитируемой цели. Устройство точной задержки на базе многоотводной линии задержки 3 обеспечивает имитацию блестящих точек цели (целей) с индивидуальными задержками. Индивидуальные амплитудные и фазовые модуляции выполняются с помощью соответствующих коэффициентов, формируемых внешним устройством, причем коэффициенты амплитудной модуляции поступают в синхронизатор 5, а коэффициенты фазовой модуляции поступают в набор модуляторов частоты (фазы) 4. С выходов набора модуляторов 4 сигналы, имитирующие соответствующие блестящие точки, поступают на коммутатор сигнала 6 и далее в дополнительный модулятор 7. В модуляторе 7 выполняются дополнительно заданные фазовые (частотные) и амплитудные модуляции (коэффициенты f0, и E0 формируется во внешнем устройстве). Далее сигнал выдается на выход имитатора - в передающую антенну.
При импульсном методе работы радиолокатора имитируемая цель будет мерцать. При непрерывном излучении или излучении зондирующего сигнала импульсами с длительностью больше n·Δt, где n - количество имитируемых блестящих точек цели, Δt - длительность интервала коммутации каждого сигнала, выходной сигнал будет содержать равные Δt отрезки излученного сигнала с переменной задержкой и скачками фазы в моменты коммутации, что в частотной области приведет к тому, что к исходным гармоникам сигнала добавятся гармоники, соответствующие сумме и разности частот «полезного» сигнала и частоты коммутации, умноженной на целое число [7]. При выборе частоты коммутации в несколько раз ниже несущей частоты и вне полосы «полезных» частот модуляции сигнала, с учетом фактического наличия во всех радиолокационных приемниках ограничивающих частотных фильтров сигнала, результирующий сигнал в рабочей (обычно низкочастотной) области по спектральному составу будет эквивалентен сигналу, образованному обычным суммированием сигналов. Выходной сигнал с коммутатора слабее в n раз по амплитуде, поэтому умножение на n выполняется в дополнительном модуляторе 7 или общем усилителе при согласовании и обеспечении оптимального уровня сигнала [8].
Нарушение мгновенных спектров и появление лишних скачков фазы не скажется на работе типового радиолокатора, т.к. поиск/захват/сопровождение целей выполняются без учета фаз сигналов с усреднением в несколько элементов разрешения и, как правило, в несколько периодов модуляции и сканирования. В радиолокаторах высокого разрешения с построением изображения фоно-целевой обстановки и распознавания типов целей также выполняется математическое усреднение в несколько периодов модуляции и сканирования.
Таким образом, замена сумматора на коммутатор в целом обеспечивает эквивалентность сигнала на временной оси и в его рабочей полосе частот по спектральному составу с нарушением мгновенных спектров и появлением лишних скачков фазы. Постоянство амплитуды выходного сигнала коммутатора (при наличии сигнала на входе имитатора) может быть компенсировано в модуляторе умножением на шумовой коэффициент со средним значением равным 1.
Быстродействующие модуляторы для каждой блестящей точки цели сложны и дороги при изготовлении имитаторов по схемам фиг. 1-2.
Целью предлагаемого изобретения является упрощение конструкции устройств формирования сигнала радиолокационной цели без ухудшения качества имитируемых радиолокационных портретов целей.
В [9] приведен способ расчета параметров имитации пространственно распределенной динамической радиофизической сцены, в которой сокращение числа имитируемых блестящих точек достигается путем объединения близких по параметрам отражателей и их сортировкой по дальности. При практическом применении этого способа, а также для имитации удаленных одиночных целей без резервирования модуляторов для промежуточных отражателей имитатор может ограничиться работой только с заданными переменными задержками блестящих точек. При этом конструкцию многоотводной линий задержки 3 можно упростить заменой большого числа выходов на один выход, соответствующий заданной задержке, выбираемой коммутатором из набора входных задержек по тому же сигналу синхронизатора 5. Для реализации индивидуальных коэффициентов модуляции блестящих точек значения коэффициентов можно подавать на дополнительный модулятор 7 с дополнительного коммутатора коэффициентов, управляемого тем же синхронизатором 5.
Предлагаемым техническим решением упрощаются требования к аппаратуре устройства формирования сигнала радиолокационной цели как при аналоговой, так и при цифровой обработке сигнала без существенного ухудшения качества имитируемых портретов целей при зондировании преимущественно длительными сигналами.
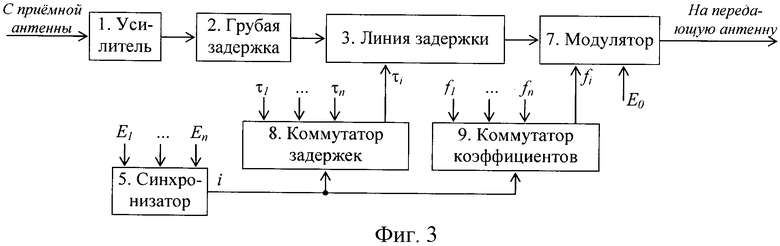
Для достижения этого технического результата прототип (фиг. 2 [7]), содержащий последовательно соединенные усилитель сигнала приемной антенны 1, устройство грубой задержки 2, устройство точной задержки 3, коэффициенты амплитудной модуляции поступают на синхронизатор 5, на передающую антенну выдается сигнал с модулятора 7, на второй и третий входы модулятора 7 подаются коэффициенты фазовой и амплитудной модуляции, снабжен коммутатором задержек 8 и коммутатором коэффициентов 9, причем управляющие входы коммутаторов подключены к выходу синхронизатора 5, дополнительные значения задержек поступают на остальные входы коммутатора задержек 8, выход которого подключен к дополнительному входу устройства точной задержки 3, определяющему величину текущей задержки для единственного выходного сигнала, подаваемого на первый вход модулятора 7, значения коэффициентов фазовой (частотной) модуляции поступают на остальные входы коммутатора коэффициентов 9, выход которого подключен ко второму входу управления фазой (частотой) модулятора 7.
Устройство содержит (фиг. 3):
1 - усилитель;
2 - устройство грубой задержки;
3 - устройство точной задержки;
5 - синхронизатор;
7 - модулятор;
8 - коммутатор задержек;
9 - коммутатор коэффициентов.
Устройство работает следующим образом: зондирующий импульс от радиолокатора, для которого создается радиолокационный портрет, поступает через приемную антенну, усилитель 1, устройство грубой задержки 2, устройство точной задержки 3 и общий модулятор 7 на выход имитатора. Устройство грубой задержки 2 осуществляет задержку по времени, соответствующую расстоянию до ближайшей блестящей точки имитируемой цели. Устройство точной задержки 3 на базе линии задержки, например, буфера FIFO с изменяемым значением текущей задержки обеспечивает имитацию блестящих точек цели (целей) с индивидуальными задержками. Значения задержек, индивидуальные амплитудные и фазовые модуляции выполняются с помощью соответствующих значений, формируемых внешним устройством, причем значения задержек τ1…τn поступают на коммутатор задержек 8, коэффициенты амплитудной модуляции E1-En поступают в синхронизатор 5, а коэффициенты фазовой или частотной модуляции f1…fn поступают на коммутатор коэффициентов 9. Выходной сигнал коммутатора коэффициентов 9 управляет работой общего модулятора 7. В модуляторе 7 также выполняются заданные или шумовые амплитудные модуляции по коэффициенту E0, формирующемуся во внешнем устройстве. Далее сигнал выдается на выход имитатора - в передающую антенну.
Дополнительные усилители, аттенюаторы для согласования уровней и возможные смесители, например, с сигналом гетеродина для согласования рабочей полосы частот блоков обработки сигналов не показаны, но могут быть использованы и рассчитаны в соответствии с [8]. Для исключения попадания выходного сигнала с передающей антенны на вход приемной антенны можно использовать циркулятор, стробирование работы и/или пространственное разнесение антенн [1, стр. 184]. При стационарных испытаниях возможно непосредственное подключение кабелей к исследуемой радиолокационной системе без использования антенн.
При цифровой обработке сигнала с использованием в качестве линий задержки буферов в оперативной памяти достаточного размера можно варьировать значения всех задержек блестящих точек целей без отдельного устройства грубой задержки. При этом можно формировать радиолокационные портреты произвольного количества целей практически произвольной протяженности с ограничением общего количества блестящих точек сцены (для сохранения качества имитации длительность зондирующего сигнала Τ должна быть много больше чем n·Δt, тогда n << Τ/Δt).
В качестве схемы цифровой обработки сигнала для аппаратной и программной реализации всех приведенных на фиг. 3 блоков, кроме усилителя 1, может быть использована СБИС 1879BM3(DSM) разработки ЗАО НТЦ «Модуль» [10], в которой путем аппаратно-программного управления возможно манипулирование 1-8 сигналами с независимыми параметрами.
Пример программно-аппаратной реализации предложенного устройства для имитации радиолокационной цели приведен на фиг. 4. Для реализации функций сдвига частоты входной и выходной сигналы должны быть представлены двумя квадратурными последовательностями - отсчетами вещественной и мнимой составляющей, поэтому входной сигнал в 19 предварительно умножается на сигналы с генератора cos(ωt) 17 и генератора sin(ωt) 18, а затем поступает на входы двух АЦП 10. Цифровая линия задержки 13 реализуется в виде кольцевого буфера во внутреннем ОЗУ с отдельными портами для записи и чтения отсчетов сигнала. Аппаратная архитектура СБИС позволяет оперировать 8 сигнальными каналами с помощью одинаковых программируемых блоков сигнальных каналов 16, функция суммирования сигналов разных каналов отсутствует, поэтому к выходным ЦАП 12 в одно время поступают квадратурные составляющие, задержанные и сдвинутые по частоте по значениям параметров, поступающих с коммутатора задержек 8 и коммутатора коэффициентов 9.
Для имитатора радиолокационной цели на базе одной СБИС 1879BM3(DSM) при программной коммутации можно использовать 6 или 7 сигнальных каналов, т.к. один канал всегда занят записью оцифрованного входного сигнала в кольцевой буфер в ОЗУ 13 и еще один канал можно периодически или постоянно использовать для обновления данных моделирования - параметров блоков 16 и 15 из массивов параметров, размещенных в ОЗУ СБИС, например, в памяти программ 20. Программный контроллер 15 работает по командам из памяти программ 20, выполняя основную функцию синхронизатора 5 путем поочередного выбора номера канала для управления коммутатором задержек 8 и коммутатором коэффициентов 9 с учетом параметров сигналов блестящих точек (интервалы смены выбранного канала пропорциональны амплитудам E1-En) размещенных в памяти программ 20.
Коммутатор задержек 8 выдает в 13 «адрес чтения» из кольцевого буфера в ОЗУ квадратурных составляющих оцифрованного сигнала, с выхода «адреса чтения», выбранного коммутатором задержек 8 по номеру блока 16. «Адрес чтения» соответствует значению задержки из набора параметров τ1…τn. Коммутатор коэффициентов 9 выдает в блок сдвига частоты 14 значение доплеровского смещения частоты, с выхода «Δf» выбранного коммутатором коэффициентов 9 по номеру блока 16 из набора коэффициентов модуляции - сдвига частоты f1…fn.
В блоке сдвига частоты 14 выполняется преобразование квадратурных составляющих сигнала IR, QR в соответствии с выражениями [10]:
IO=IR·cos(2πΔft)+QR·sin(2πΔft),
QO=QR·cos(2πΔft)-IR·sin(2πΔft),
где Δf - доплеровское смещение частоты,
t - значение счетчика реального времени.
Полученные в блоке сдвига частоты 14 отсчеты вещественной и мнимой составляющей IO, QO поступают на входы двух ЦАП 12 и далее умножаются в 19 на сигналы с генератора cos(ωt) 17 и генератора sin(ωt) 18, а затем поступают на сумматор 11, формирующий аналоговый выходной сигнал, который после дополнительной амплитудной модуляции, например, в аттенюаторе (на фиг. 4 не показан) выдается на передающую антенну имитатора радиолокационной цели.
При этом СБИС 1879BM3(DSM) работает в циклическом режиме с воспроизведением на выходе задержанного и преобразованного входного сигнала сколь угодно большой длительности без разрывов, что дает возможность имитировать сигнал, отраженный от цели, при произвольном законе модуляции зондирующего сигнала без дополнительных синхронизирующих связей между имитатором и радиолокатором. С помощью соответствующих команд, выполняемых программным контроллером 15, осуществляется динамическое изменение параметров имитируемых блестящих точек цели - задержек τ1…τn и коэффициентов модуляции (сдвига частоты) f1…fn в блоках сигнальных каналов 16.
Как и в аналоге [6], прототипе [7] общее управление имитатором, изменение массивов амплитудных и фазовых коэффициентов может выполняться из внешнего устройства, на фиг. 4 - управляющей ЭВМ 21, например, путем модификации содержимого памяти программ 20.
При этом эффективное число имитируемых блестящих точек, реализуемое программной периодичной сменой наборов формируемых задержек, может быть кратно числу сигнальных каналов, используемых для формирования выходного сигнала. Общее количество имитируемых блестящих точек будет ограничиваться быстродействием линии задержки, АЦП/ЦАП и возможностью выбора частоты работы коммутатора без появления паразитных гармоник, вызванных коммутацией, в полосе рабочих частот радиолокатора, для которого имитируется цель (цели).
Изобретение позволяет отказаться от множества модуляторов, сложных для реализации, при большом числе блестящих точек, особенно при цифровой обработке сигнала. Достигаемый результат - упрощение требований к аппаратуре имитатора как при аналоговой, так и при цифровой обработке сигнала без существенного ухудшения качества имитируемых портретов целей при зондировании преимущественно длительными сигналами.
Литература
1. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием / Под. Ред. Ю.М. Перунова. Изд. 2-е, испр. и дополн. - М.: Радиотехника, 2008. - 416 с. (стр. 134-135, рис. 5.2).
2. Патент US 2008/018525. Radio frequency signature augmentation system. Дата публикации: 23.09.1986 (фиг. 22).
3. Патент US 5892479. Electromagnetic target generator. Дата публикации: 06.04.1999.
4. Патент FR 2596164. Method for deceiving a sonar or radar detector, and a decoy for implementing the method. Дата публикации: 25.09.1987.
5. Патент US 4613863. Electronic augmentation of radar targets. Дата публикации: 23.09.1986 (фиг. 2).
6. Патент GB 2134740. Electronic augmentation of radar techniques. Дата публикации: 15.08.1984.
7. Патент RU 2504799. Имитатор радиолокационной цели при зондировании преимущественно длительными сигналами / А.С. Боков, Н.А. Дядьков, В.Г. Важенин, В.В. Мухин, Д.Е. Щербаков, Л.И. Пономарев. Дата приоритета: 05.12.2011.
8. Патент RU 2412449. Имитатор радиолокационной цели. Дата приоритета: 26.12.2008.
9. Патент RU 2386143. Способ имитации радиосигнала, отраженного от пространственно распределенной динамической радиофизической сцены, в реальном времени. Дата приоритета: 02.06.2008.
10. Микросхема интегральная 1879BM3(DSM), Техническое описание, Версия 1.1, ЮФКВ 431268 001 TO1 К, Научно-технический центр «Модуль». М., 2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2011 |
|
RU2504799C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| ИМИТАТОР ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2449308C1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1987 |
|
SU1841002A1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2008 |
|
RU2402036C2 |
| Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора | 2021 |
|
RU2787471C1 |
Изобретение относится к устройствам, предназначенным для имитации частотно-временной структуры радиолокационного сигнала, отраженного от подстилающей поверхности, от одной или нескольких целей, и может быть использовано, например, для имитации ложных целей и помех для защиты присутствующих целей, а также для имитации эхо-сигналов радиолокаторов и радиовысотомеров. Достигаемый результат - упрощение требований к аппаратуре имитатора как при аналоговой, так и при цифровой обработке сигнала без существенного ухудшения качества имитируемых портретов целей при зондировании преимущественно длительными сигналами. Указанный результат достигается за счет того, что осуществляется динамическое изменение параметров имитируемых блестящих точек цели. 4 ил. 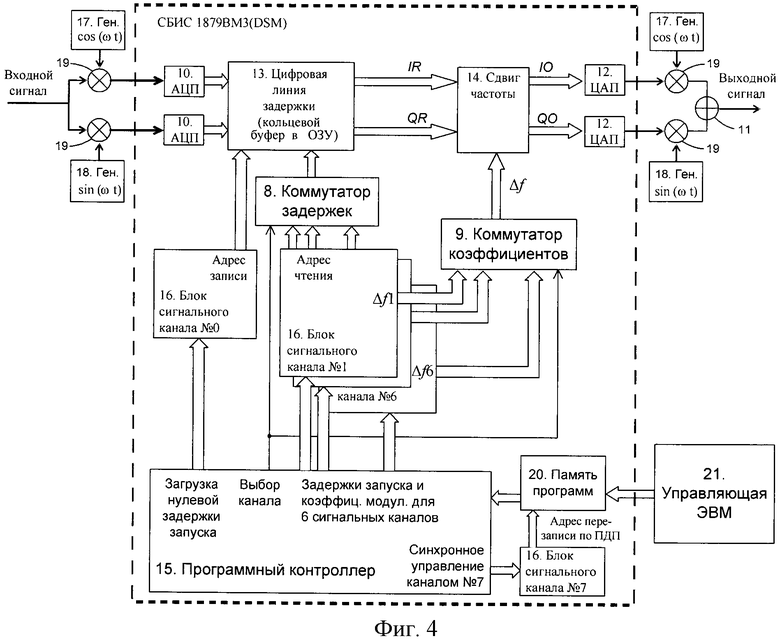
Устройство для имитации радиолокационной цели при зондировании преимущественно длительными сигналами, содержащее последовательно соединенные усилитель сигнала приемной антенны, устройство грубой задержки, устройство точной задержки, при этом коэффициенты амплитудной модуляции поступают на синхронизатор, на передающую антенну выдается сигнал с модулятора, на второй и третий входы модулятора подаются коэффициенты фазовой и амплитудной модуляции, отличающееся тем, что оно снабжено коммутатором задержек и коммутатором коэффициентов, причем управляющие входы коммутаторов подключены к выходу синхронизатора, дополнительные значения задержек поступают на остальные входы коммутатора задержек, выход которого подключен к дополнительному входу устройства точной задержки, определяющему величину текущей задержки для единственного выходного сигнала, подаваемого на первый вход модулятора, значения коэффициентов фазовой модуляции поступают на остальные входы коммутатора коэффициентов, выход которого подключен ко второму входу модулятора.
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2011 |
|
RU2504799C2 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| Бесконтактный телефонный искатель | 1954 |
|
SU103237A1 |
| Фотоэлектрическое устройство для определения концентрации пульпы | 1948 |
|
SU81571A1 |
| JP 2009236628 A, 15.10.2009 | |||
| JP 2009258051 A, 16.04.2003 | |||
| US 6633251 B1, 14.10.2003 | |||
| US 5426433 A, 20.06.1995. | |||

