6 3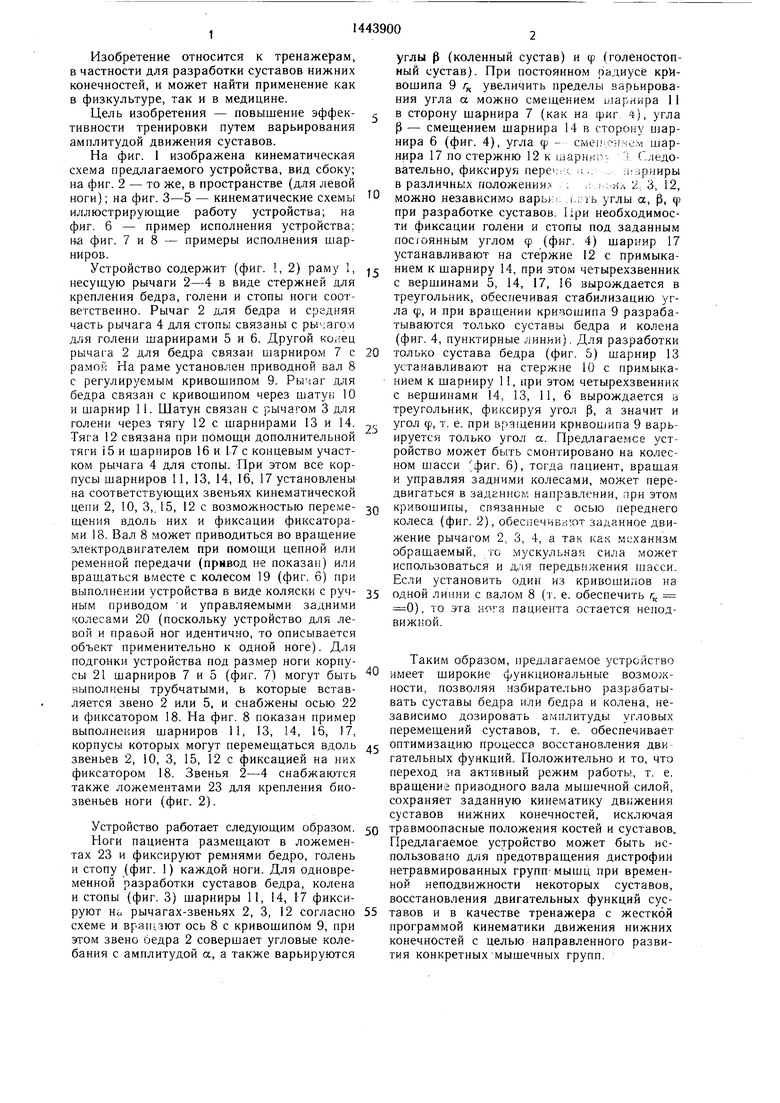
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ БЕГУНОВ | 1992 |
|
RU2046616C1 |
| ТРЕНАЖЕР | 1991 |
|
RU2008053C1 |
| Устройство для тренировки бегунов | 1989 |
|
SU1755828A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| Тренажер | 1989 |
|
SU1710045A1 |
| Устройство для разработки движений в коленном суставе | 1989 |
|
SU1671290A1 |
| Устройство для тренировки мышечной системы спортсменов | 1989 |
|
SU1655523A1 |
| Устройство для тренировки спринтеров | 1990 |
|
SU1757691A1 |
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| Устройство для тренировки мышц спортсменов | 1989 |
|
SU1710084A1 |
Изобретение позволяет повысить эффективность тренировки путем варьирования амплитудой движения суставов. Устройство содержит последовательно связанные один с другим с помощью шарниров стержни 2, 3, 4 ,с элементами для крепления соответственно к бедру, голени и стопе. Стержень 2 шарнирно связан с рамой 1 и посредством шатуна 10 с кривошипом 9 приводного вала 8. Шатун 10 связан через тягу 12 с шарнирами .13 и 14 со стержнем 3 для голени. Тяга 12 в свою очередь связана через подобную тягу 15 с концевым участком стержня 4 для стопы. Все корпусы шарниров 11, 13, 14, 16 и 17 установлены на соответствуюш,их звеньях кинематической цепи с возможностью перемещения вдоль них и фиксации. Это позволяет изменять взаимное исходное положение стержней для биозвеньев ноги и варьировать величиной их углового смещения. 8 ил.
17
4
00 QO
is
Фие. i
Изобретение относится к тренажерам, в частности для разработки суставов нижних конечностей, и может найти применение как в физкультуре, так и в медицине.
Цель изобретения - повышение эффек- тивности тренировки путем варьирования амплитудой движения суставов.
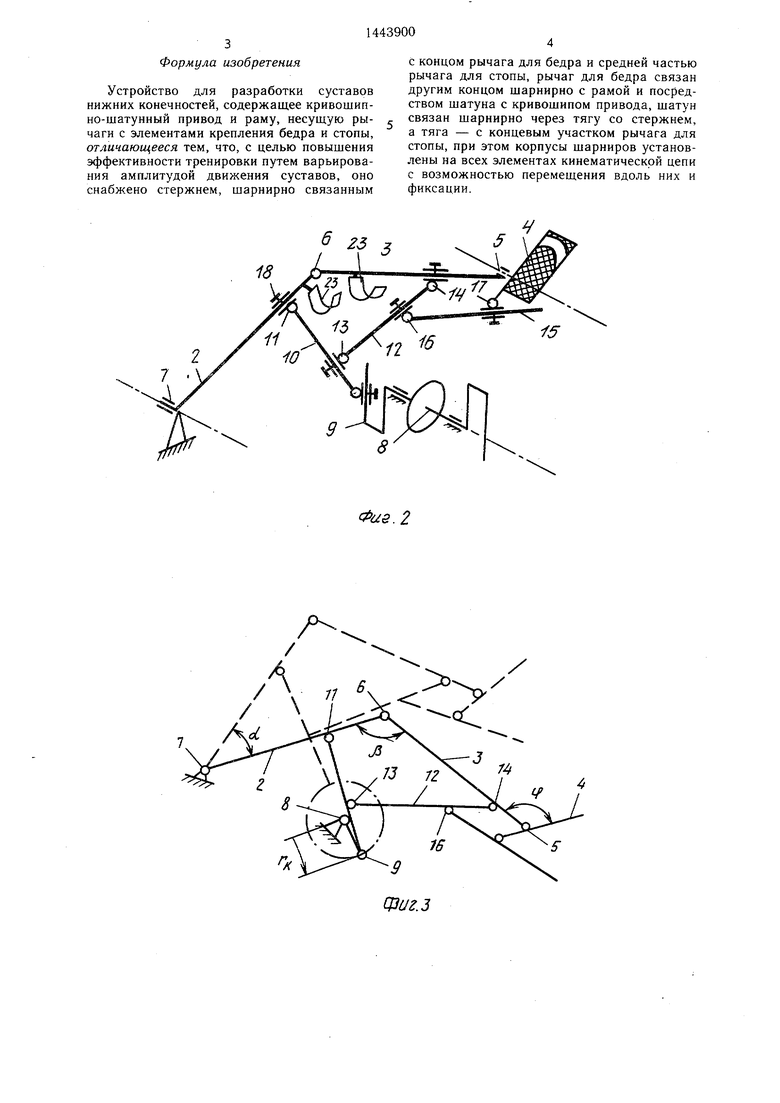
На фиг. 1 изображена кинематическая схема предлагаемого устройства, вид сбоку; на фиг. 2 - то же, в пространстве (для левой ноги); на фиг. 3-5 - кинематические схемы иллюстрирующие работу устройства; на фиг. 6 - пример исполнения устройства; на фиг. 7 и 8 - примеры исполнения шарниров.
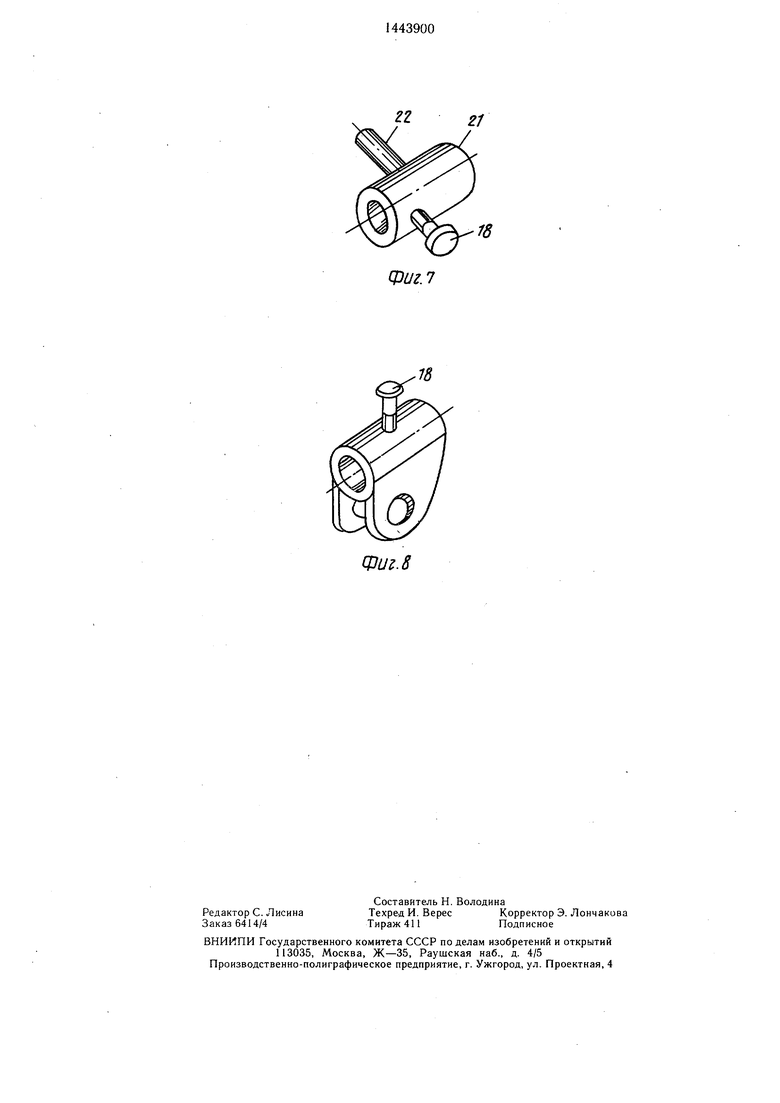
Устройство содержит (фиг. I, 2) раму 1, несуш.ую рычаги 2-4 в виде стержней для крепления бедра, голени и стопы ноги соответственно. Рычаг 2 для бедра и средняя часть рычага 4 для стопы связаны с рычагом для голени шарнирами 5 и 6. Другой конец рычага 2 для бедра связан иларниром 7 с рамой На раме установлен приводной вал 8 с регулируемым кривошипом 9. Рычаг для бедра связан с кривошипом через шатун 10 и шарнир 1 i. Шатун связан с рычагом 3 для голени через тягу 12 с шарнирами 13 и 14. Тяга 12 связана при помощи дополнительной тяги 15 и шарниров 16 и 17с концевым участком рычага 4 для стопы. При этом все корпусы шарниров 11, 13, 14, 16, 17 установлены на соответствующих звеньях кинематической цепи 2, 10, 3,. 15, 12 с возможностью переме- шения вдоль них и фиксации фиксаторами 18. Вал 8 может приводиться во вращение электродвигателем при помощи цепной или ременной передачи (привод не показан) или вращаться вместе с колесом 19 (фиг. 6) при выполнении устройства в виде коляски с руч- ным приводом И управляемыми задними колесами 20 (поскольку устройство для левой и правой ног идентично, то описывается объект применительно к одной ноге). Для подгонки устройства под размер ноги корпусы 21 шарниров 7 и 5 (фиг. 7) могут быть выполнены трубчатыми, в которые вставляется звено 2 или 5, и снабжены осью 22 и фиксатором 18. На фиг. 8 показан пример выполнения шарниров 11, 13, 14, 16, 17, корпусы которых могут перемещаться вдоль звеньев 2, 10, 3, 15, 12 с фиксацией на них фиксатором 18. Звенья 2-4 снабжаются также ложементами 23 для крепления биозвеньев ноги (фиг. 2).
Устройство работает следующим образом. Ноги пациента размещают в ложементах 23 и фиксируют ремнями бедро, голень и стопу (фиг. 1) каждой ноги. Для одновременной разработки суставов бедра, колена и стопы (фиг. 3) шарниры И, 14, 17 фиксируют на рычагах-звеньях 2, 3, 12 согласно схеме и вращают ось 8 с кривошипом 9, при этом звено бедра 2 совершает угловые колебания с амплитудой а, а также варьируются
углы р (коленный сустав) и ф (голеностопный сустав). При постоянном радиусе кривошипа 9 /;, увеличить пределы варьирования угла а можно смещением шарнира 11 в сторону шарнира 7 (как на фиг- 4), угла Р - смещением шарнира 14 в сторо,чу шарнира 6 (фиг. 4), угла ф - , шарнира 17 по стержню 12 к шарнип;. 3 Следовательно, фиксируя nepe -::;(i;.: ;1;:урниры
в различных положениям ; ,;./ :.Ял 2, 3, 12,
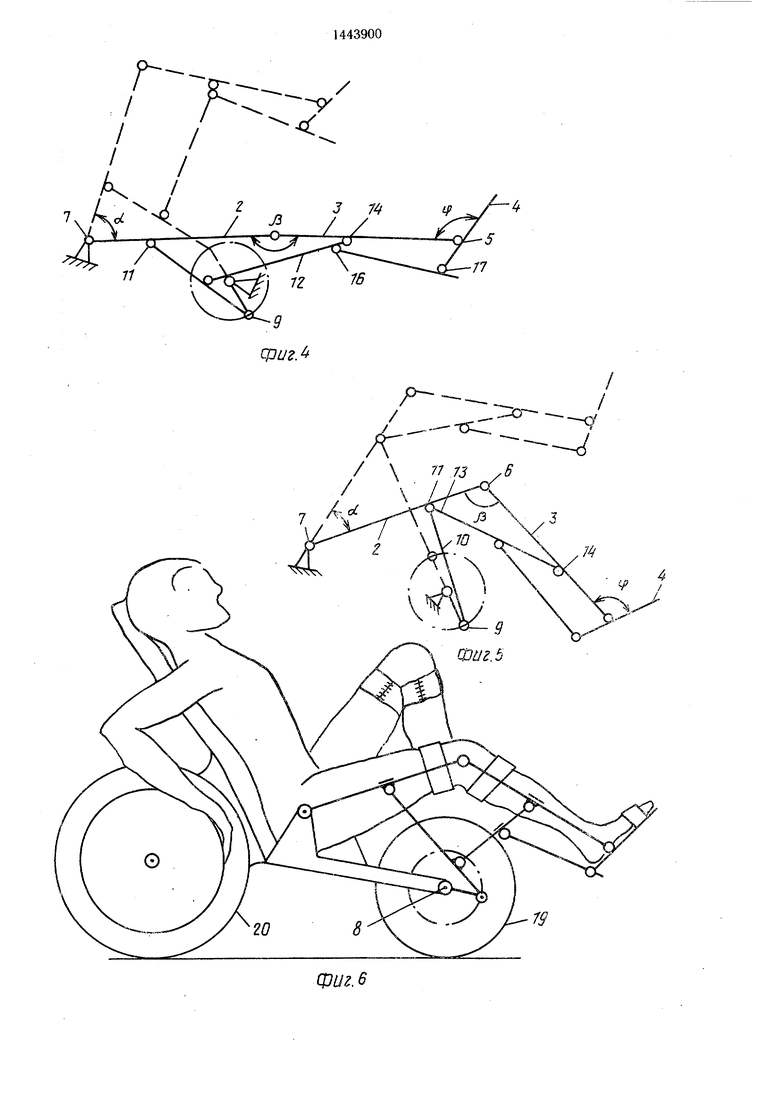
можно независимо варьк.: .i,;;ib углы а, р, ф при разработке суставов. При необходимости фиксации голени и стопы под заданным постоянным углом ф (фиг. 4) 17 устанавливают на стержне 12 с примыканием к шарниру 14, при этом четырехзвенник с вершинами 5, 14, 17, 16 вырождается в треугольник, обеспечивая стабилизацию угла ф, и при вращении кричошипа 9 разрабатываются только суставы бедра и колена (фиг. 4, пунктирные линии). Для разработки только сустава бедра (фиг. 5) шарнир 13 устанавливают на стержне 10 с примыканием к щарниру 11, при этом четырехзвенник с вершинами 14, 13, И, 6 вырождается а треугольник, фиксируя угол р, а значит и угол ф, т. е. при вращении кривошипа 9 варьируется только угол а. Предлагаемое устройство может быть смонтировано на колесном шасси фиг. 6), тогда пациент, вращая и управляя задними колесами, может передвигаться в задгннсм направлении, при этом кривошипы, связанные с осью переднего колеса (фиг. 2), обеспечивают заданное движение рычагом 2, 3, 4, а так как механизм обращаемый, то мускульная сила может использоваться и для передвижения шасси. Если установить один из кривошипов на одной линии с валом 8 (т. е. обеспечить г 0), то эта HfV a пациента остается неподвижкой.
Таким образом, предлагаемое устройство имеет широкие функциональные возможности, позволяя избирательно разрабатывать суставы бедра или бедра и колена, независимо дозировать амплитуды угловых перемещений суставов, т. е. обеспечивает оптимизацию процесса восстановления двигательных функций. Положительно и то, что переход на активный режим работы, т. е. вращение приводного вала мышечной силой, сохраняет заданную кинематику движения суставов нижних конечностей, исключая травмоопасные положения костей и суставов. Предлагаемое устройство может быть использовано для предотвращения дистрофии нетравмированных групп- мышц при временной неподвижности некоторых суставов, восстановления двигательных функций суставов и в качестве тренажера с жесткой программой кинематики движения нижних конечностей с целью направленного развития конкретных мыщечных групп.
Формула изобретения
Устройство для разработки суставов нижних конечностей, содержащее кривошип- но-шатунный привод и раму, несущую рычаги с элементами крепления бедра и стопы, отличающееся тем, что, с целью повышения эффективности тренировки путем варьирования амплитудой движения суставов, оно снабжено стержнем, шарнирно связанным
б Z5
18
с концом рычага для бедра и средней частью рычага для стопы, рычаг для бедра связан другим концом шарнирно с рамой и посредством шатуна с кривошипом привода, шатун связан шарнирно через тягу со стержнем, а тяга - с концевым участком рычага для стопы, при этом корпусы шарниров установлены на всех элементах кинематической цепи с возможностью перемещения вдоль них и фиксации.
Фаз. 2
Фаг.з
/
фиг. 6
Фиг. 7
Фи.З
| 1ВЕЛОТРЕНАЖЕР | 0 |
|
SU365154A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
