Способ относится преимущественно к нефтегазовой промышленности и может быть применен для управления системой приводов буровых вибросит с линейной или эллиптической траекторией колебаний рамы, состоящей из двух дебалансных возбудителей.
Наиболее близким к заявляемому способу является способ управления синхронизацией системы приводов вибросит (а.с. 1264998 СССР, МПК7 В07В 1/40. Способ управления процессом синхронизации динамической системы / Трубицын В.Г., Блехман И.И., Усменец А.С., Полоцкий В.А., Печенев А.В., Тодоров B.C., Рожков В.А.).
Недостатком этого способа является неоднородность траекторий виброколебаний по длине сетки вибросита, что уменьшает его пропускную способность. Самосинхронизация дебалансных возбудителей является только необходимым условием работы вибросита. Для эффективного просеивания бурового раствора необходимо, чтобы траектории виброколебаний во всех точках сетки были бы одинаковыми.
Технической задачей изобретения является повышение пропускной способности вибросита на протяжении всего времени его работы путем непрерывного поддерживания одинаковых траекторий виброколебаний рамы во всех точках по длине сетки.
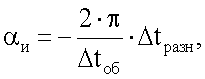
Техническая задача решается предлагаемым способом управления системой приводов вибросита из двух дебалансных возбудителей, включающим изменение сдвига по фазе между углами поворотов дебалансов путем воздействия на электродвигатели, в котором постоянно измеряют время оборота первого дебаланса и интервал времени между моментами прохождения первым и вторым дебалансами одинаковых положений, затем вычисляют сдвиг по фазе αи между углами поворотов дебалансов по формуле
где Δtоб - время одного оборота первого дебаланса; Δtразн - интервал времени между моментами прохождения дебалансами одинаковых положений; после чего определяют разность между полученным значением и значением сдвига по фазе заданного конструкцией вибросита, и изменяют действующее значение напряжения, подводимого к одному из двигателей дебалансных возбудителей так, чтобы эта разность сводилась бы к нулевому значению. Если первоначально знак полученной разности совпадает со знаком направления вращения первого дебаланса, то уменьшают действующее значение напряжения, подводимого к его двигателю, если знаки не совпадают, то уменьшают действующее значение напряжения, подводимого к двигателю второго дебалансного возбудителя. В дальнейшем если изменяемое действующее значение напряжения достигает действующего значения напряжения сети, то начинают уменьшать действующее значение напряжения на двигателе другого дебалансного возбудителя.
Траектории виброколебаний во всех точках рамы при вращении дебалансов в разные стороны будут одинаковыми при любой форме траекторий, включая эллиптические, если выполняются два условия, предотвращающие угловые колебания рамы вибросита. Первое условие заключается в соблюдении равенства (см. пат. на полезную модель №46686)

где mi, εi - масса и эксцентриситет дебаланса i-го возбудителя (i=1, 2);
ri - расстояние от центра тяжести виброрамы в сборе до центра вращения дебаланса i-го возбудителя.
Второе условие вытекает из выражения для сдвига фаз α между углами поворотов дебалансов (см. книгу Блехман И.И. Синхронизация механических систем. - М.: Наука, 1971, формула (16.12) на стр.472)

где σ2 - знак направления вращения дебаланса второго вибровозбудителя;
δ1, δ2 - углы между горизонталью и лучом, выходящим из центра тяжести рамы и проходящим через центр вращения соответственно 1-го и 2-го дебалансных вибровозбудителей;
Мдв1, Мс1 - электродвигательный момент и момент сопротивления на валу первого дебалансного вибровозбудителя;
 - вибрационный момент вибросита.
- вибрационный момент вибросита.
Знак минус введен нами в формулу (3) для согласования положительного направления отсчета углов с общепринятым в математике, так как в книге положительное направление принято по часовой стрелке, то есть в противоположном направлении.
Второе условие, предотвращающее угловые колебания рамы вибросита, заключается в соблюдении равенства нулю избыточного момента ΔM1=Mдв1-Мс1=0 на первом дебалансном вибровозбудителе, что автоматически дает и равенство нулю избыточного момента на втором дебалансном вибровозбудителе. Поэтому сдвиг по фазе между углами поворотов 1-го и 2-го дебалансов заданный конструкцией вибросита равен

Поскольку непосредственное измерение избыточного момента весьма сложная задача, то, определив текущее значение сдвига по фазе между углами поворотов дебалансов и сравнив его со значением сдвига по фазе, заданного конструкцией вибросита, можно косвенно измерить значение избыточного момента, а затем управлением двигателем соответствующего дебалансного возбудителя свести его к нулю.
Условия самосинхронизации вращения дебалансных вибровозбудителей  проще добиться не управлением их электродвигателями, как описано в прототипе, а увеличением параметров r1, r2 в конструкции вибросита.
проще добиться не управлением их электродвигателями, как описано в прототипе, а увеличением параметров r1, r2 в конструкции вибросита.
Установка даже новых дебалансных вибровозбудителей на вибросито требует их попарной подборки вследствие разных механических характеристик асинхронных электродвигателей и разных моментов сопротивлений на их валах. В ходе эксплуатации моменты сопротивлений существенно изменяются во времени вследствие износа подшипников и изменения состояния смазки в них. У вибросит с эллиптическими траекториями дебалансные возбудители принципиально имеют существенно разные значения параметров дебалансов mi·εi, что автоматически дает разные моменты сопротивления на их валах, а следовательно, ненулевые избыточные моменты. Поэтому предлагаемый способ управления системой приводов вибросита необходим для эффективной работы вибросит.
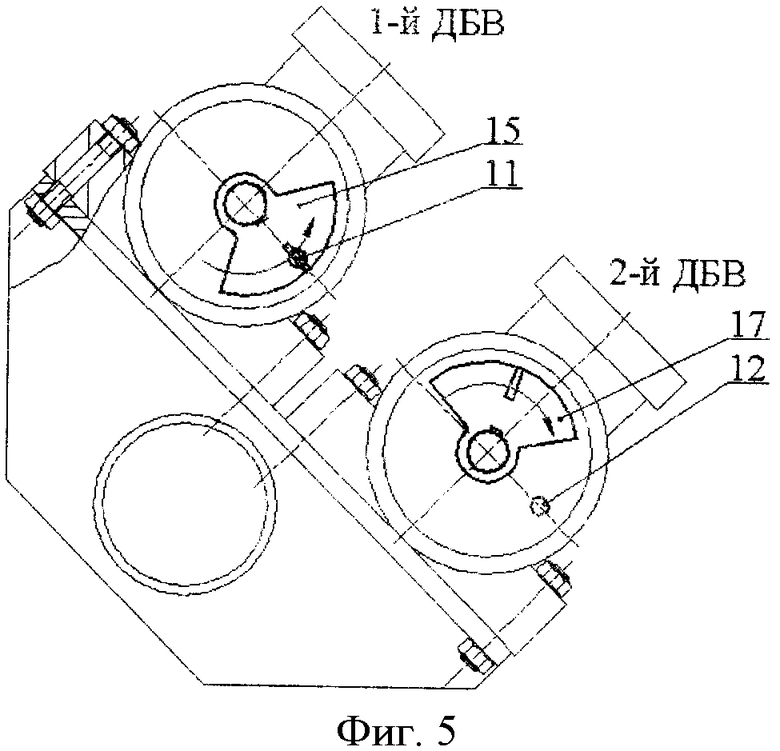
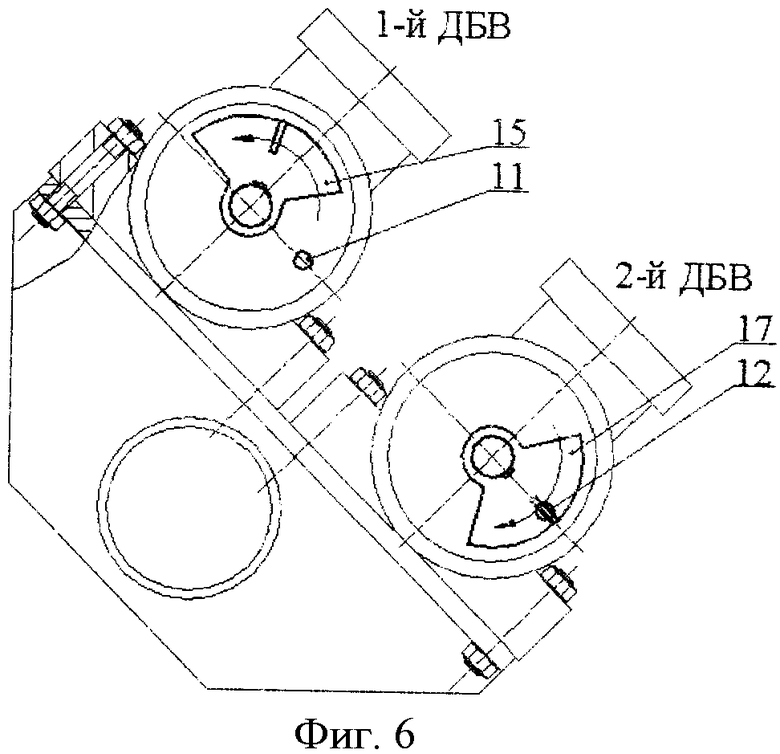
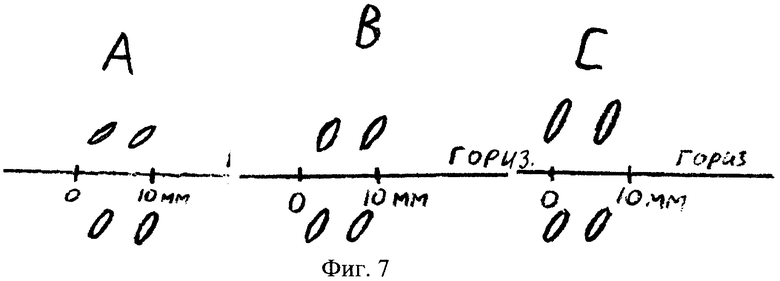
Предлагаемый способ опробован на экспериментальной установке, представленной на фиг.1, 2, 3. На фиг.4 изображена функциональная схема системы, созданная для опробования прелагаемого способа управления системой приводов вибросита. На фиг.5 показаны положения 1-го и 2-го дебалансов в момент прохождения первым из них положения, соответствующего его нулевому углу поворота. На фиг.6 показаны положения дебалансов в момент прохождения вторым из них положения, соответствующего его нулевому углу поворота. На фиг.7 показаны траектории виброколебаний рамы в точках А В и С, соответствующих краям и центру сетки, причем выше горизонтальной прямой траектории зафиксированы при работе вибросита без управления системой приводов вибросита, ниже прямой - при работе вибросита с управлением системой приводов вибросита по предлагаемому способу.
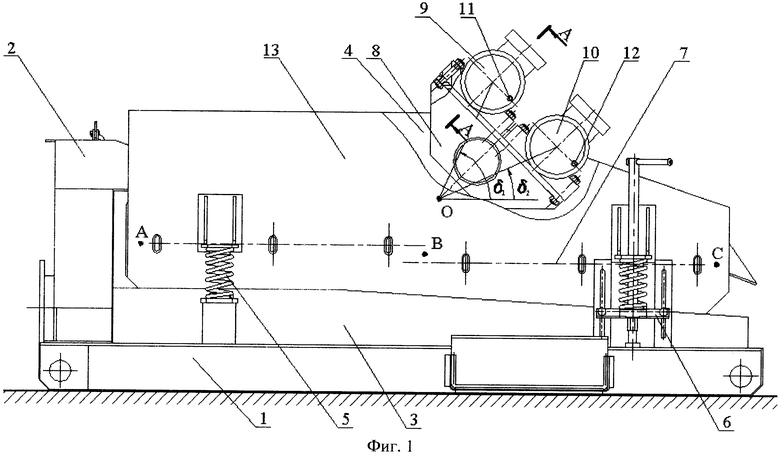
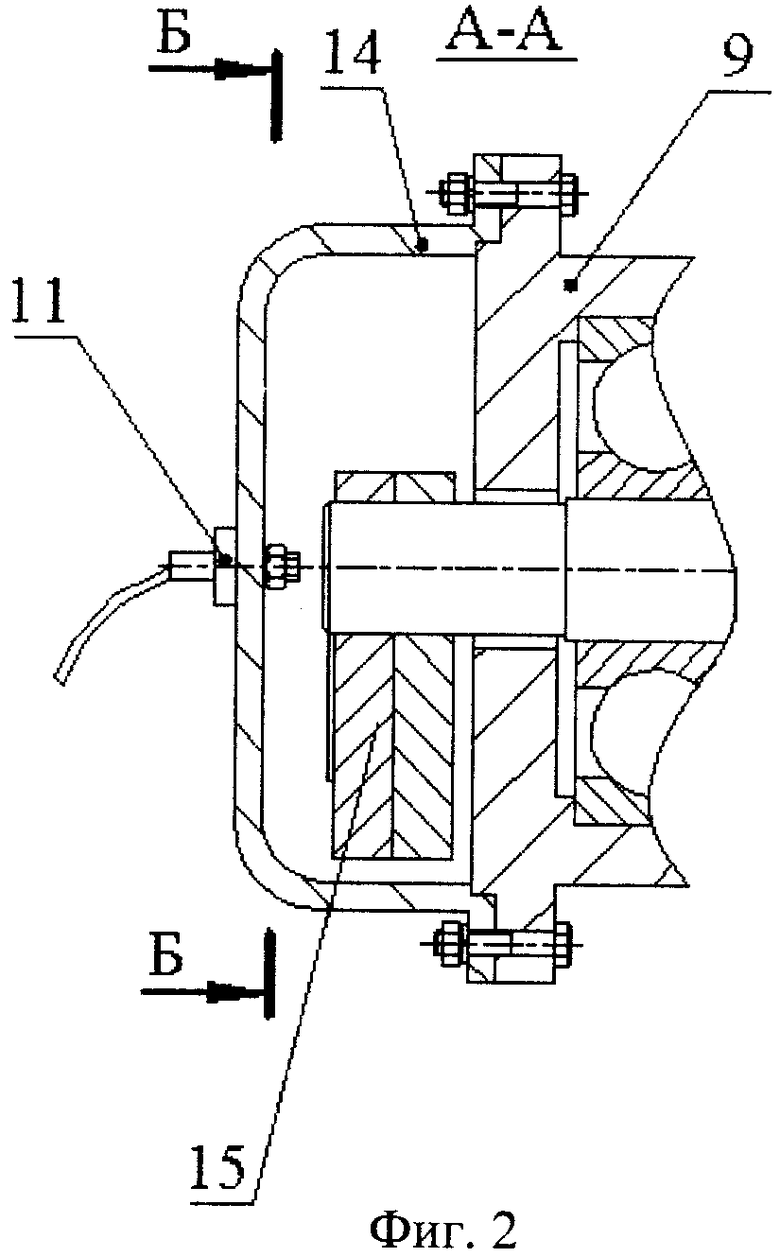
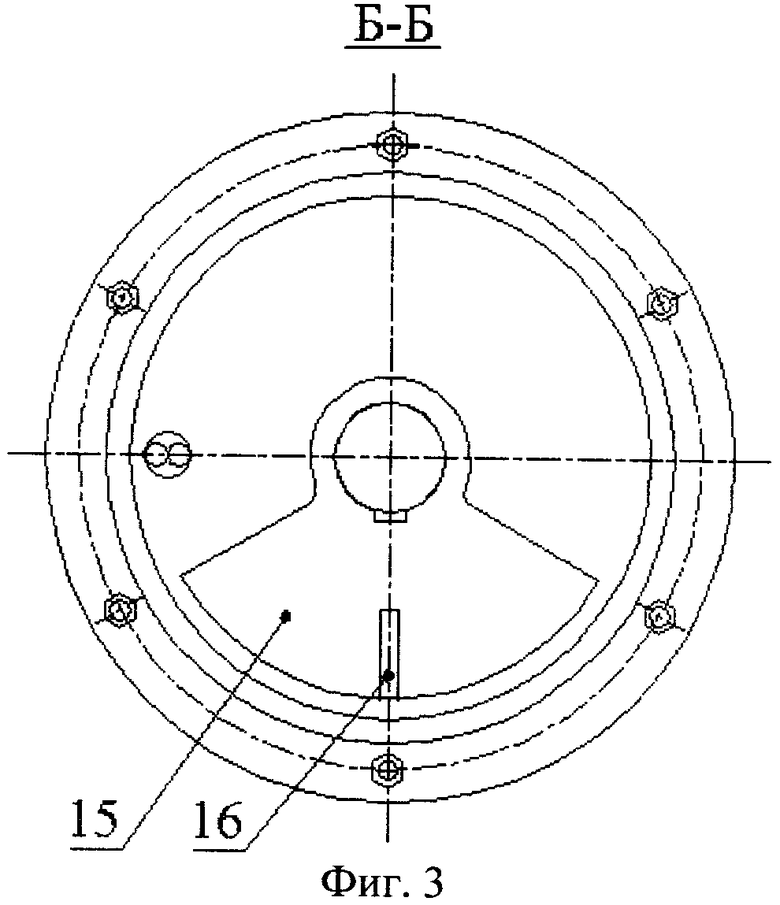
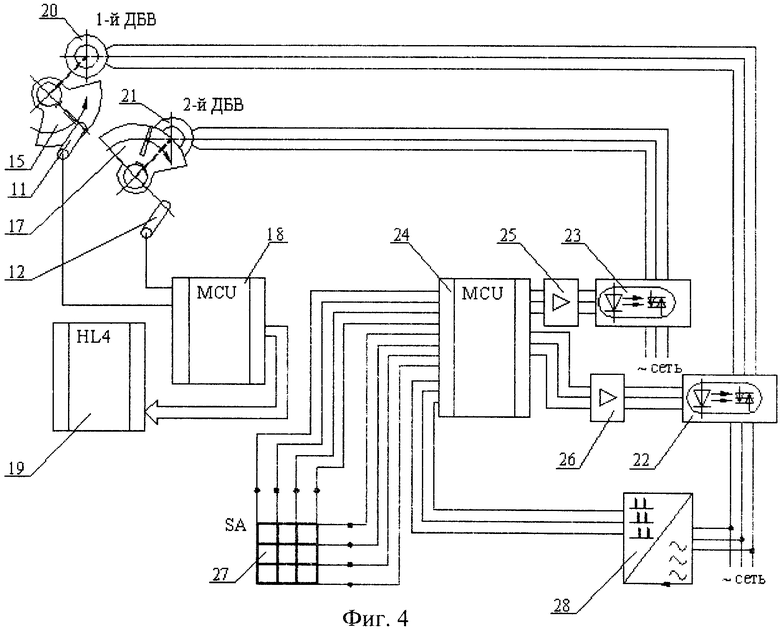
Экспериментальная установка на фиг.1 представляет собой вибросито, содержащее основание 1, на котором установлены приемник бурового раствора 2 и поддон для просеянного раствора 3. Рама вибросита 4 подвешена на пружинах 5, закрепленных на основании 1, и имеет механизм регулировки угла наклона 6. На раме вибросита 4 закреплена сетка 7 и установлена траверса 8, на которой установлены два дебалансных вибровозбудителя 9 и 10. Первый из них 9 снабжен датчиком положения дебаланса 11, второй 10 - датчиком положения дебаланса 12. Для контроля формы траекторий виброколебаний на боковине 13 виброрамы 4 отмечены точки А, В и С, соответствующие краям и центру сеток. Подробнее установка датчика положения 11 показана на фиг.2 и 3. Он установлен в отверстии кожуха 14 1-го дебалансного вибровозбудителя 9 в месте, соответствующем нулевому углу поворота дебаланса 15. На дебалансе 15 по оси симметрии наклеена полоска светоотражающего материала 16. На 2-м дебалансном вибровозбудителе 10, дебаланс которого на фиг.4 обозначен позицией 17, датчик положения 12 установлен аналогично. В качестве датчиков положения использованы оптопары, состоящие из светодиода и фотодиода. В качестве датчиков положения дебалансов также успешно опробованы электромагнитные бесконтактные путевые выключатели, для которых вместо полосок светоотражающего материала на дебалансы механически крепились металлические шторки. Выходные сигналы датчиков положения дебалансов 11 и 12 на фиг.4 подключены к входному порту программируемого микроконтроллера 18, а к выходному порту этого контроллера подключен четырехразрядный семисегментный светодиодный индикатор 19. Этот контроллер предназначен для непрерывных измерений времени оборота 1-го дебаланса, интервала времени между моментами прохождения дебалансами 1-го и 2-го дебалансных возбудителей своих нулевых положений и вычисления сдвига по фазе между углами поворотов дебалансов по формуле (1), а также для вывода значений сдвига по фазе и периодического вывода измеренных значений интервалов времени на индикатор 19. Электродвигатели 20 1-го дебалансного возбудителя и 21 2-го дебалансного возбудителя подключены к сетевому напряжению через бесконтактные пускатели 22 и 23. В качестве силовых ключей в этих пускателях использованы оптосимисторы. Выходной порт программируемого микроконтроллера 24 подключен к светодиодам оптосимисторов пускателей 23 и 22 через усилители 25 и 26. К входным портам контроллера 24 подключена клавиатура 27 и формирователь импульсов начала полупериодов фазных напряжений сети 28. Контроллер 24 и формирователь 28 образуют программно-реализованную систему импульсно-фазового управления оптосимисторами пускателей 22 и 23, а клавиатура 27 предназначена для выбора управляемого электродвигателя и ввода значения временной задержки открытия оптосимисторов пускателей 22 и 23 относительно импульсов начала полуволны фазных напряжений сети, что эквивалентно заданию угла открытия оптосимисторов.
Опробование способа управления синхронизацией системы приводов вибросита проведено на вибросите СВ1ЛЭМ с эллиптической траекторией движения виброрамы. Конструкция этого вибросита соответствует условию (2) и имеет конструктивные параметры: δ1=1,06 рад (61°), δ2=0,86 рад (49°). Вращение дебалансов производилось в разные стороны, причем вращение 2-го дебаланса происходило по часовой стрелке (σ2=-1). Сдвиг по фазе между углами поворотов дебалансов, заданный конструкцией вибросита при нулевом избыточном моменте по формуле (4) равен αзад=-1,92. Для контроля форм траекторий в точках А, В и С на боковину 13 наклеивались листики бумаги и на работающем вибросите к ним прикладывался неподвижный карандаш.
После окончания разгона вибросита с помощью контроллера 18 постоянно измерялось время оборота дебаланса 15 1-го дебалансного возбудителя 9 и интервал времени между моментом прохождения 1-м дебалансом 15 своего датчика положения 11 и моментом прохождения 2-м дебалансом 17 своего датчика положения 12. После чего по формуле (1) контроллером 18 вычислялось измеренное значение сдвига фаз и выводилось на индикатор 19, которое в данном случае оказалось равным αи=-2,16 радиана. На индикатор 19 периодически выводились так же значения времени оборота 1-го дебаланса (41.5 мс) и интервал времени между моментами прохождений дебалансами своих датчиков положений (14.3 мс). Положения обоих дебалансов 15 и 17 в эти моменты времени показаны на фиг.5 и 6. Разность между измеренным значением сдвига по фазе и значением сдвига по фазе, заданным конструкцией вибросита, была равна Δα=αи-αзад=-0,24 радиана. Траектории виброколебаний рамы в точках А, В и С зафиксированы на бумаге и показаны на фиг.7 выше горизонтальной прямой, где видно существенное различие в их форме. Так как знак разности сдвига фаз Δα совпадает со знаком направления вращения 1-го дебаланса, то в соответствии с предлагаемым способом следует уменьшать действующее значение напряжения, подводимого к фазным обмоткам электродвигателя 2-го дебалансного возбудителя 21. Для этого с помощью клавиатуры 27 вводили в микроконтроллер 24 номер 2, соответствующий двигателю 22 2-го дебалансного возбудителя 10. После этого с клавиатуры 27 в микроконтроллер 24 вводили значение временной задержки открытия оптосимисторов бесконтактного пускателя 23 относительно импульсов начала полуволн фазных напряжений и на индикаторе 19 наблюдали измеренное значение сдвига по фазе. Изменяя значения временной задержки открытия оптосимисторов бесконтактного пускателя 23, добивались нулевого значения разности Δα. Это удалось при значении временной задержки, равной 4,1 мс, а действующее значение фазного напряжения на двигателе 21 2-го дебалансного возбудителя 10 уменьшилось с 214 В до 176 В. После этого были зафиксированы карандашом на бумаге траектории виброколебаний рамы в точках А, В и С, которые приведены на фиг.7 ниже горизонтальной прямой. Как видно на фиг.7 эти траектории практически совпадают, что подтверждает решение поставленной технической задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления системой приводов вибросита | 2017 |
|
RU2649203C1 |
| Способ управления системой приводов вибросита | 2022 |
|
RU2801447C1 |
| Устройство управления вибрационной машиной с двумя дебалансными вибровозбудителями | 2023 |
|
RU2814668C1 |
| Вибросито | 1989 |
|
SU1727933A1 |
| ВИБРОСИТО | 2007 |
|
RU2356648C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УДЕЛЬНОЙ ПРОПУСКНОЙ СПОСОБНОСТИ СЕТОК ВИБРОСИТ | 2008 |
|
RU2379127C1 |
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2528715C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| СПОСОБ ОЧИСТКИ БУРОВОГО РАСТВОРА И ОСУШКИ ШЛАМА НА СЕТКАХ ИЛИ НА СИТОВЫХ КАССЕТАХ ВИБРАЦИОННОГО СИТА | 2014 |
|
RU2540171C1 |
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523045C1 |
Изобретение относится к нефтегазовой промышленности и может быть применено для управления системой приводов буровых вибросит с линейной или эллиптической траекторией колебаний рамы, состоящей из двух дебалансных возбудителей. Способ управления системой приводов вибросита из двух дебалансных возбудителей включает изменение сдвига по фазе между углами поворотов дебалансов путем воздействия на электродвигатели дебалансных возбудителей. Постоянно измеряют время оборота первого дебаланса и интервал времени между моментами прохождения дебалансами одинаковых положений, затем вычисляют сдвиг по фазе между углами поворотов первого и второго дебалансов по математической зависимости. После чего определяют разность между полученным значением и значением сдвига по фазе заданного конструкцией вибросита и изменяют действующее значения напряжения, подводимого к одному из двигателей дебалансных возбудителей так, чтобы эта разность сводилась к нулевому значению. Если первоначально знак полученной разности совпадает со знаком направления вращения первого дебаланса, то уменьшают значение напряжения, подводимого к его двигателю. Если знаки не совпадают, то уменьшают значение напряжения, подводимого к двигателю второго дебалансного возбудителя и в дальнейшем управление производят изменением значение напряжения, подводимого к выбранному двигателю. Если изменяемое напряжение достигает действующего значения напряжения сети, то начинают уменьшать действующее значение напряжения на двигателе другого дебалансного возбудителя. Технический результат - повышение эффективности просеивания, а также повышение пропускной способности вибросит. 7 ил.
Способ управления системой приводов вибросита из двух дебалансных возбудителей, включающий изменение сдвига по фазе между углами поворотов дебалансов путем воздействия на электродвигатели дебалансных возбудителей, отличающийся тем, что постоянно измеряют время оборота первого дебаланса и интервал времени между моментами прохождения дебалансами одинаковых положений, затем вычисляют сдвиг по фазе между углами поворотов первого и второго дебалансов по формуле
где Δtоб - время одного оборота первого дебаланса; Δtразн - интервал времени между моментами прохождения дебалансами одинаковых положений; после чего определяют разность между полученным значением и значением сдвига по фазе заданного конструкцией вибросита и изменяют действующее значения напряжения, подводимого к одному из двигателей дебалансных возбудителей, так, чтобы эта разность сводилась к нулевому значению, причем если первоначально знак полученной разности совпадает со знаком направления вращения первого дебаланса, то уменьшают значение напряжения, подводимого к его двигателю, если знаки не совпадают, то уменьшают значение напряжения, подводимого к двигателю второго дебалансного возбудителя, и в дальнейшем управление производят изменением значения напряжения, подводимого к выбранному двигателю, а если изменяемое напряжение достигает действующего значение напряжения сети, то начинают уменьшать действующее значение напряжения на двигателе другого дебалансного возбудителя.
| Способ управления процессом синхронизации динамической системы | 1985 |
|
SU1264998A1 |
| Виброгрохот | 1978 |
|
SU787111A1 |
| Устройство для очистки бурового раствора от выбуренной породы | 1991 |
|
SU1815325A1 |
| ВИБРОСИТО | 2007 |
|
RU2356648C2 |
| ОГНЕВОЙ ТРУБЧАТЫЙ КАЛОРИФЕР ДЛЯ ВОЗДУШНОГО ОТОПЛЕНИЯ ИЛИ ПРИТОЧНОЙ ВЕНТИЛЯЦИИ | 1935 |
|
SU46686A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСЕИВАЮЩЕЙ МАШИНОЙ И ПРОСЕИВАЮЩАЯ МАШИНА | 2003 |
|
RU2333805C2 |
| ВИБРОСИТО РЕЗОНАНСНОЕ | 2004 |
|
RU2288786C2 |
| WO 2007014444 A1, 08.02.2007 | |||
| US 5265730 A, 30.11.1993. | |||

