Изобретение относится преимущественно к нефтяной и газовой промышленности и может быть применено для управления системой приводов бурового вибросита с линейной или эллиптической траекторией колебаний рамы.
Наиболее близким заявляемому способу является способ управления системой приводов вибросита (Пат. РФ №2402387) состоит из двух дебалансных возбудителей, включающий изменение сдвига по фазе между углами поворотов дебалансов путем воздействия на электродвигатели дебалансных возбудителей, при котором постоянно измеряют время оборота первого дебаланса и интервал времени между моментами прохождения дебалансами одинаковых положений, затем вычисляют сдвиг по фазе между углами поворотов первого и второго дебалансов.
Недостатком этого способа является наличие систематической погрешности в измерении сдвига по фазе между углами поворотов роторов дебалансных вибровозбудителей, что приводит к изменению траектории движения точек рамы вибросита от проектной, а следовательно, снижает пропускную способность вибросита. Причиной этого является неопределенность между моментами времени прохождения датчиков каких дебалансов следует измерять интервал времени. Во-вторых, датчики положения дебалансов неточно расположены на горизонтальных положительных полуосях, проходящих через центры вращения этих дебалансов, что также дает систематическую погрешность в измерении сдвига по фазе между углами поворотов их роторов.
Задачей изобретения является устранение систематической погрешности измерения в измерении сдвига по фазе между углами поворотов роторов дебалансных вибровозбудителей, что даст повышение точности поддержания проектной траектории движения точек рамы вибросита, а следовательно позволит постоянно обеспечивать эффективность просеивания бурового раствора.
Техническим результатом является обеспечение высокой пропускной способности вибросита вследствие повышения точности поддержания проектной траектории движения точек виброрамы.
Технический результат достигается тем, что Способ определения сдвига по фазе для управления системой приводов вибросита из двух дебалансных возбудителей, вращающихся в разные стороны, включающий постоянное измерение времени оборота одного из дебалансов и интервала времени между моментами прохождения дебалансами положений, в которых установлены датчики, закрепленные на кожухах дебалансных возбудителей, отличающийся тем, что периодически измеряют углы установки датчиков положений дебалансов между горизонтальной положительной полуосью и прямыми, проходящими через центр вращения этих дебалансов и датчиков, причем интервал времени между моментами прохождения дебалансами положений, в которых установлены датчики, измеряют от момента времени прохождения датчика положения дебалансом, вращающегося против часовой стрелки, до момента времени прохождения датчика положения другим дебалансом, а сдвиг по фазе вычисляют по формуле

где: Δtоб - время полного оборота дебаланса, вращающегося по часовой стрелке, с;
Δtразн - интервал времени от момента прохождения дебалансом, вращающемся против часовой стрелки, своего датчика до момента времени прохождения другого дебаланса своего датчика, с;
β1, β2 - углы установки датчиков относительно горизонтали, радиан.
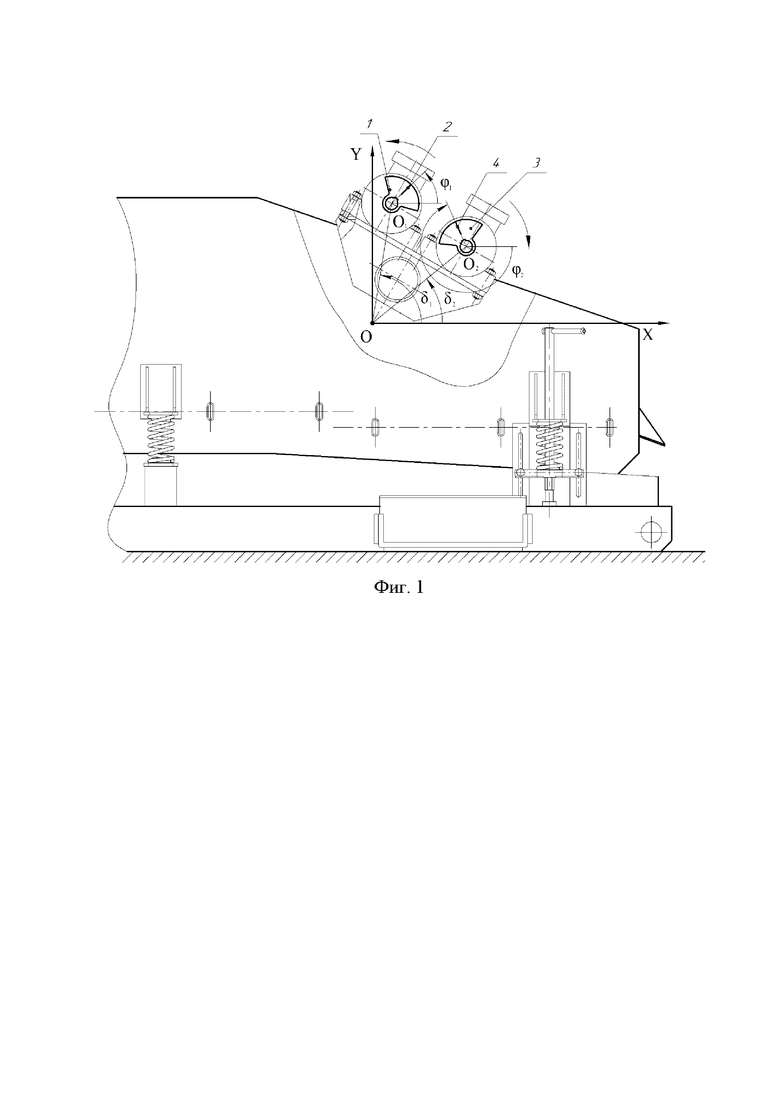
Вибросито на фигуре 1 эффективно может эффективно работать только при наличии самосинхронизации вращений роторов дебалансов, которые вращаются в разные стороны и их углы поворотов ϕ1 (t), ϕ1 (t) описываются формулами ϕ1(t)=σ1⋅(ωr⋅t) и ϕ2(t)=σ2⋅(ωr⋅t+α) (см. книгу Блехман И.И. Синхронизация механических систем. - М.: Наука, 1971), где t - текущее время; ωr - угловая частота вращений роторов дебалансов 1 и 2; σ1, σ2 - индексы направлений вращения роторов дебалансов (как принято в математике: σi=+1 вращение против часовой стрелки, σi=-1 вращение по часовой стрелке) причем σ1=-σ2; α - сдвиг по фазе между углами поворотов роторов дебалансов. На фигуре 1 показаны датчики положений дебалансов 1 и 3, а также метки середин дебалансов 2 и 4.
Сдвиг по фазе между углами поворотов роторов дебалансов по этой теории определяется по формуле:

где δ1, δ2 - направляющие углы установки центров вращений роторов дебалансов O1 и О2 относительно центра тяжести рамы вибросита в сборе О; ΔМ1 - избыточный момент асинхронного электродвигателя (АД) 1-го дебалансного вибровозбудителя (ДБВ);  вибрационный момент вибросита, который определяется конструкционными параметрами вибросита. Избыточный момент равен разности между электродвигательным моментом АД и моментом сопротивления на его роторе. В ходе эксплуатации он изменяется неизвестным образом, поэтому при проектировании вибросита его принимают равным нулю и проектное значение сдвига по фазе равно αП=σ2⋅(δ1+δ2). В прототипе текущее значение αи(7) поддерживается равным проектному значению αП системой автоматического регулирования.
вибрационный момент вибросита, который определяется конструкционными параметрами вибросита. Избыточный момент равен разности между электродвигательным моментом АД и моментом сопротивления на его роторе. В ходе эксплуатации он изменяется неизвестным образом, поэтому при проектировании вибросита его принимают равным нулю и проектное значение сдвига по фазе равно αП=σ2⋅(δ1+δ2). В прототипе текущее значение αи(7) поддерживается равным проектному значению αП системой автоматического регулирования.
Нумерация ДБВ на фигуре 1 произвольна. Так как углы поворотов дебалансов имеют разные знаки, то физически сдвиг по фазе между ними равен их сумме

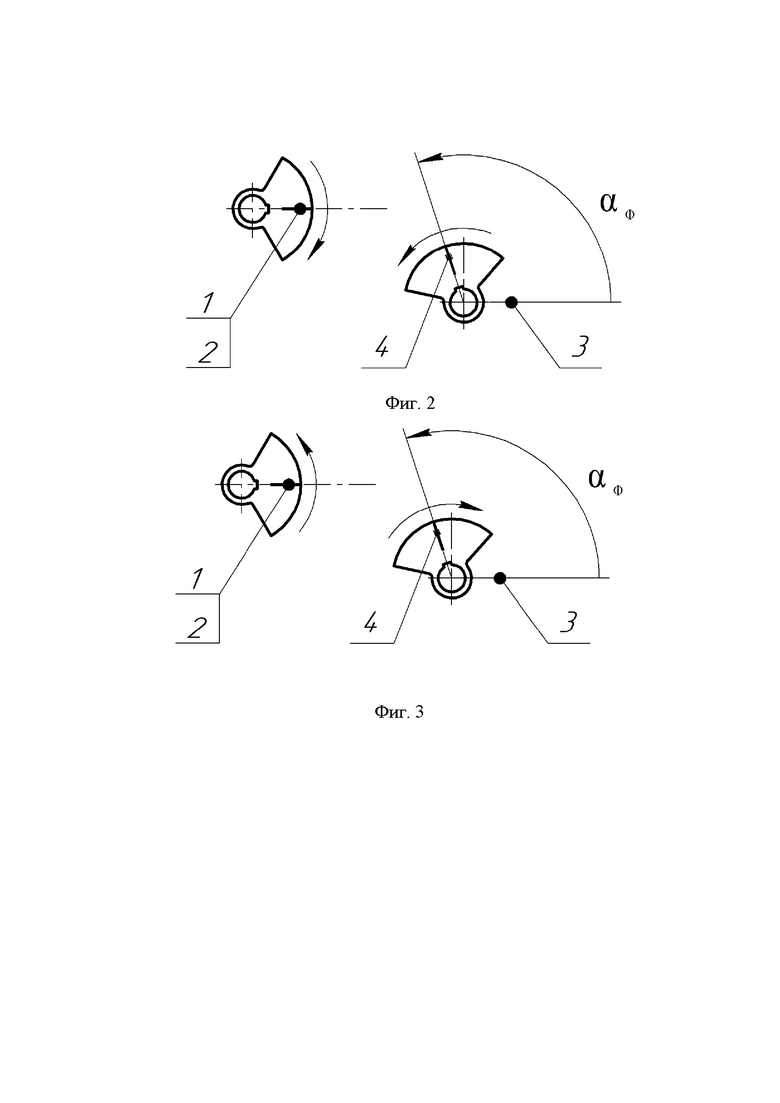
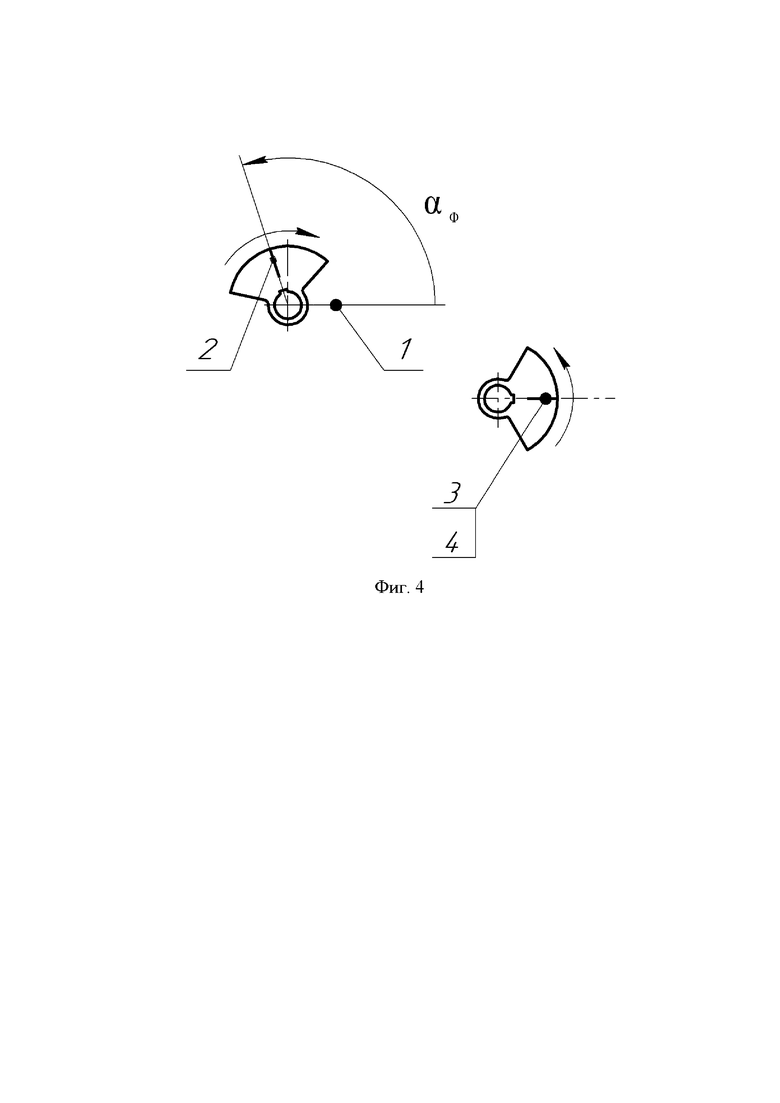
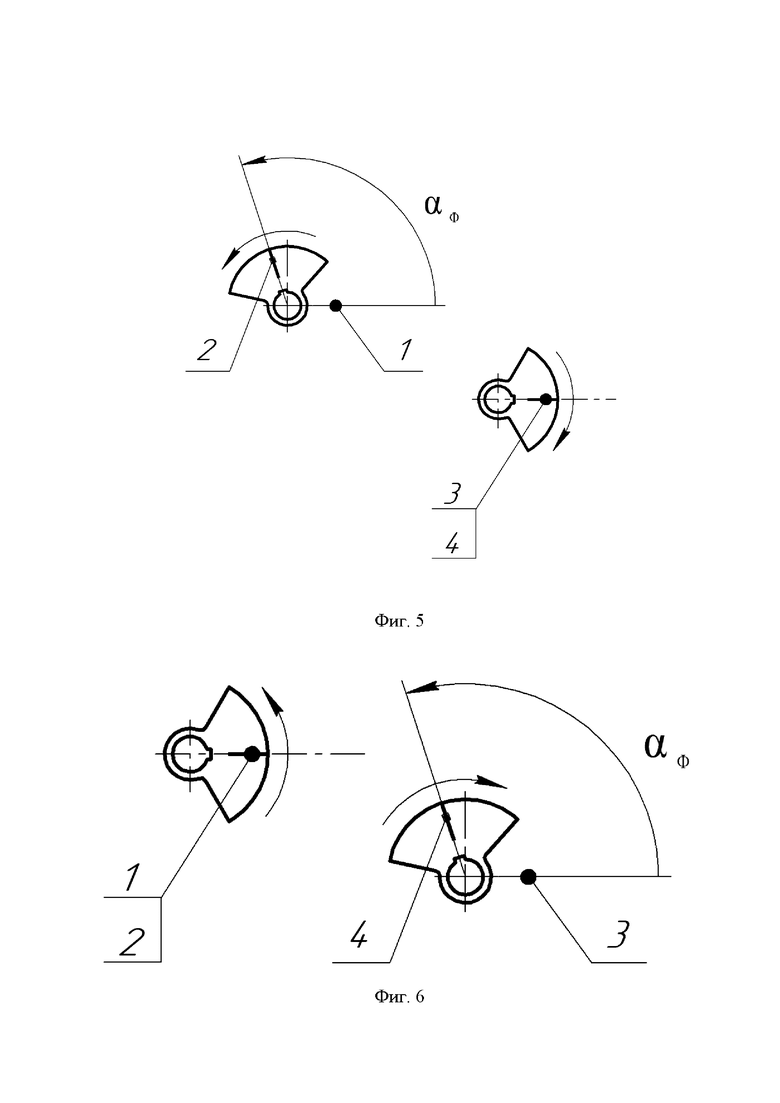
Как видно из формулы (3) физически сдвиг по фазе не зависит ни от нумерации ДБВ, ни от направлений их вращений, что показано на фигурах 2-5. Когда средина одного из дебаланса проходит через горизонтальную положительную полуось т.е. ϕi(tk)=0, то средина другого дебаланса в это время повернут на угол ϕj(tk)=αФ.
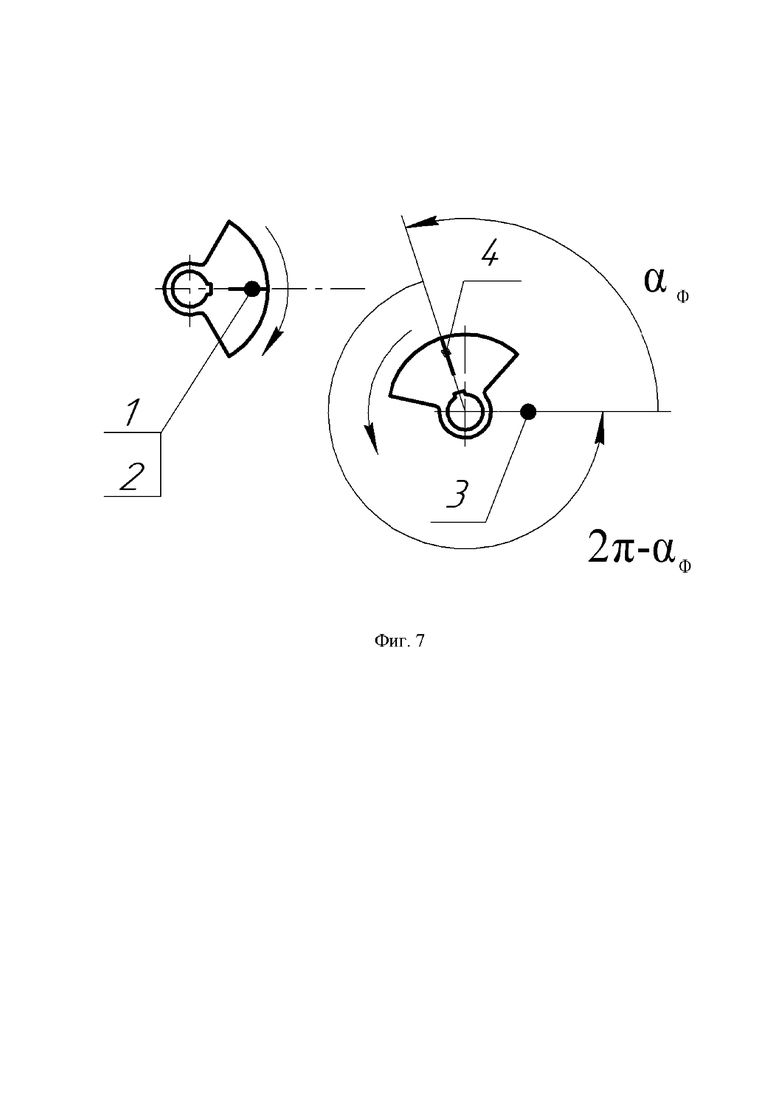
Косвенное измерение сдвига по фазе через измерение интервала времени между моментами прохождения срединами дебалансов своих датчиков положения имеет 2 варианта как показано на фигурах 6 и 7.
В первом варианте интервал времени измеряется между ДБВ вращающегося против часовой стрелки и ДБВ вращающегося по часовой стрелке. Если первый средина первого дебаланса находится в положении своего датчика, то второй дебаланс до срабатывания своего датчика положения должен пройти как показано на фигуре 6 угол αФ, что соответствует интервалу времени Δtразн=αФ/(2⋅π/Δtоб), где ωr=2⋅π/Δtоб по сути угловая частота вращения роторов ДБВ. Тогда измеренное значение сдвига фазы равно его физическому значению

По второму варианту интервал времени измеряется между ДБВ вращающегося по часовой стрелке и ДБВ вращающегося против часовой стрелки. Если средина первого дебаланса находится в положении своего датчика, то второй дебаланс до срабатывания своего датчика положения должен пройти как показано на фигуре 7 угол 2⋅π⋅αФ, что соответствует интервалу времени Δtразн=(2⋅π-αФ)/(2⋅π/Δtоб). Тогда чтобы измеренное значение сдвига фазы было бы равно его физическому значению его надо определять по формуле

Так как первый вариант проще, то в заявляемом техническом решении используется именно этот вариант.
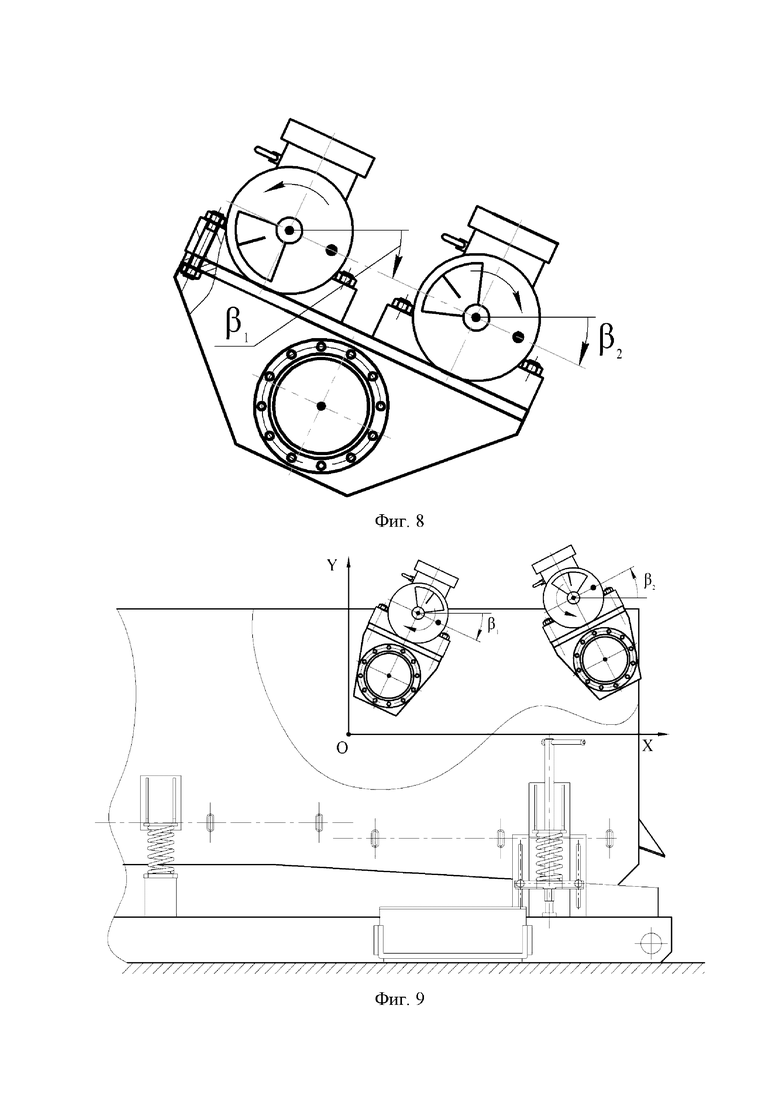
ДБВ изготавливается на основе специального асинхронного электродвигателя взрывозащищенного исполнения на лапах. Кожуха дебалансов жестко прикреплены к корпусу ДБВ. Датчик положения дебаланса может быть расположен на его кожухе на горизонтальной положительной полуоси, проходящей через центр вращения. При монтаже ДБВ на вибросито датчик положения оказывается смещенным относительно горизонтальной положительной полуоси как показано на фигурах 8 и 9. В случае монтажа обеих ДБВ на одной траверсе, как показано на фигуре 8, датчики положения смещены на одинаковые углы β1=β2. При монтаже ДБВ на отдельных траверсах как показано на фигуре 9 смещение датчиков положения может происходить на разные углы β1, β2. Кроме того, деформация пружин подвески рамы вибросита также может вносить свой вклад в эти углы.
Смещение датчиков положения дебалансов относительно горизонтальной положительной полуоси приводит к систематической погрешности измерения сдвига по фазе между углами поворотов роторов дебалансов. На фигурах 8 и 9 показаны смещения датчиков положений дебалансов на углы β1, β2, которые периодически необходимого измерять примерно раз в месяц. Интервал времени между импульсами датчиков положений 1-го и 2-го дебалансов в этом случае станет другим при одном и том значении величины сдвига по фазе. Датчик положения 1-го ДБВ на фигуре 8 даст импульс позже чем при нулевом значении β1 на величину β1/ω. Датчик положения 2-го ДБВ даст импульс раньше чем при нулевом значении β2 на величину β2/ωr. Тогда интервал времени между этими импульсами будет равен:

Отсюда измеренное значение сдвига по фазе между углами поворотов дебалансов равно:

Предлагаемое техническое решение апробировано на физической модели вибросита. В качестве датчиков положения дебалансов использованы щелевые оптоэлектронные микросхемы KTIR06111S. Обработка сигналов датчиков положения и вычисление сдвига по фазе между углами поворотов производилось измерительным преобразователем напряжения Е20-10 производства фирмы L-Card.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ПРИВОДОВ ВИБРОСИТА | 2009 |
|
RU2402387C1 |
| Способ управления системой приводов вибросита | 2017 |
|
RU2649203C1 |
| ВИБРОСИТО | 2007 |
|
RU2356648C2 |
| Устройство управления вибрационной машиной с двумя дебалансными вибровозбудителями | 2023 |
|
RU2814668C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЕКТОРА ДИСБАЛАНСА | 1991 |
|
RU2016384C1 |
| Устройство для автоматического измерения фазового положения дебаланса | 1977 |
|
SU720289A1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНЕРЦИОННОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ СИЛЫ, ВЫЗЫВАЮЩЕЙ ДВИЖЕНИЕ | 1994 |
|
RU2110432C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| Устройство для измерения фазы и частоты вала дебалансного возбудителя колебаний | 1980 |
|
SU943664A1 |
| ВИБРАЦИОННАЯ МАШИНА Д.ПЯ ТРАМБОВКИ | 1969 |
|
SU237924A1 |
Предложенное изобретение относится преимущественно к нефтяной и газовой промышленности и может быть применено для управления системой приводов бурового вибросита с линейной или эллиптической траекторией колебаний рамы. Способ определения сдвига по фазе для управления системой приводов вибросита из двух дебалансных возбудителей, вращающихся в разные стороны включает постоянное измерение времени оборота одного из дебалансов и интервала времени между моментами прохождения дебалансами положений, в которых установлены датчики, закрепленные на кожухах дебалансных возбудителей. Периодически измеряют углы установки датчиков положений дебалансов между горизонтальной положительной полуосью и прямыми, проходящими через центр вращения этих дебалансов и датчиков. Интервал времени между моментами прохождения дебалансами положений, в которых установлены датчики, измеряют от момента времени прохождения датчика положения дебалансом, вращающегося против часовой стрелки, до момента времени прохождения датчика положения другим дебалансом, а сдвиг по фазе вычисляют по математической зависимости. Технический результат - обеспечение высокой пропускной способности вибросита вследствие повышения точности поддержания проектной траектории движения точек виброрамы. 9 ил.
Способ определения сдвига по фазе для управления системой приводов вибросита из двух дебалансных возбудителей, вращающихся в разные стороны, включающий постоянное измерение времени оборота одного из дебалансов и интервала времени между моментами прохождения дебалансами положений, в которых установлены датчики, закрепленные на кожухах дебалансных возбудителей, отличающийся тем, что периодически измеряют углы установки датчиков положений дебалансов между горизонтальной положительной полуосью и прямыми, проходящими через центр вращения этих дебалансов и датчиков, причем интервал времени между моментами прохождения дебалансами положений, в которых установлены датчики, измеряют от момента времени прохождения датчика положения дебалансом, вращающегося против часовой стрелки, до момента времени прохождения датчика положения другим дебалансом, а сдвиг по фазе вычисляют по формуле

где: Δtоб - время полного оборота дебаланса, вращающегося по часовой стрелке, с;
Δtразн - интервал времени от момента прохождения дебалансом, вращающемся против часовой стрелки, своего датчика до момента времени прохождения другого дебаланса своего датчика, с;
β1, β2 - углы установки датчиков относительно горизонтали, радиан.
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ПРИВОДОВ ВИБРОСИТА | 2009 |
|
RU2402387C1 |
| Способ управления процессом синхронизации динамической системы | 1985 |
|
SU1264998A1 |
| Способ управления системой приводов вибросита | 2017 |
|
RU2649203C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСЕИВАЮЩЕЙ МАШИНОЙ И ПРОСЕИВАЮЩАЯ МАШИНА | 2003 |
|
RU2333805C2 |
| Устройство для индукционного нагрева | 1940 |
|
SU60003A1 |
| WO 2007014444 A1, 08.02.2007 | |||
| КИЧКАРЬ И.Ю | |||
| "Синтез системы привода буровых вибросит", Автореферат диссертации, Краснодар, 2007. | |||

