Изобретение относится к вибрационной технике и может использоваться в горнодобывающей промышленности, обрабатывающей промышленности и промышленности строительных материалов в качестве устройства управления для грохотов и сит с двумя дебалансными вибровозбудителями. Заявляемое устройство управления регулирует процесс пуска, прохождения зоны резонанса и выхода в рабочий зарезонансный режим вибрационной машины.
Известно устройство управления пуском электродвигателя резонансной вибрационной машины, содержащее тахогенератор, установленный на валу электродвигателя, подключенное к нему трехпозиционное реле, реле счета импульсов с катушкой и размыкающимся контактором, катушку контактора прямого вращения, катушку контактора обратного вращения, также катушку дополнительного контактора, реле счета импульсов и дополнительным контактором обратного направления вращения [1. Авторское свидетельство СССР 1267573]. Данное устройство позволяет существенно снизить крутящий момент электродвигателя, но его применение требует предварительного расчета работы реле счета импульсов, основанного на знании параметров системы. В то же время, некоторые параметры машины, в частности коэффициенты демпфирования, оценить с требуемой точностью достаточно сложно, и даже незначительное их изменение может повлиять на работу устройства и даже принципиально изменить характер переходного процесса. Таким образом, устройство весьма чувствительно к погрешностям определения параметров машины и низкоэффективно в практических задачах.
Известна вибрационная машина с двумя значениями статического момента вибровозбудителя и возможностью перевода в любое из двух значений по команде оператора или управляющего программного устройства за счет сил инерции (динамического момента) [2. Патент RU 2295396]. Устройство управления выполнено в виде программно-командного устройства и управляемого преобразователя частоты. Программно-командное устройство выдает команды в реальном времени на все фазы работы вибратора: пуск, разгон, работу с большим значением статического момента, перевод и работу подвижного дебаланса в положении малого статического момента, торможение с подготовкой последующего «легкого» пуска, остановку электродвигателя. Недостатками данного решения являются сложность конструкции и значительные динамические нагрузки на электродвигатель при переключении статического момента.
В качестве прототипа выбрано устройство управления вибрационной машиной (виброситом) с двумя дебалансными вибровозбудителями, описанное в патенте [3. RU 2402387]. Два дебаланса снабжены датчиками, в качестве которых использованы оптопары, или электромагнитные бесконтактные путевые выключатели. Выходные сигналы датчиков положения дебалансов подключены к входному порту программируемого микроконтроллера. Устройство управления имеет также светодиодный индикатор, усилители, формирователь импульсов и контроллер. Электродвигатели дебалансных возбудителей подключены к сетевому напряжению через бесконтактные пускатели. В качестве силовых ключей в этих пускателях использованы оптосимисторы. Контроллер и формирователь образуют программно-реализованную систему импульсно-фазового управления оптосимисторами пускателей, а клавиатура предназначена для выбора управляемого электродвигателя и ввода значения временной задержки открытия оптосимисторов пускателей относительно импульсов начала полуволны фазных напряжений сети, что эквивалентно заданию угла открытия оптосимисторов. Устройство управления обеспечивает повышение пропускной способности вибросита путем непрерывного поддерживания одинаковых траекторий виброколебаний его рамы.
Однако данное устройство не решает задачу преодоления зоны резонансных колебаний, часто возникающую при эксплуатации вибрационных машин при использовании недостаточно мощных двигателей, когда машина не может достичь зарезонансного рабочего режима из-за эффекта Зоммерфельда. Использование же двигателей с завышенной мощностью увеличивает металлоемкость конструкции, энергозатраты при пуске и снижает КПД машины. Кроме того, задачу поддержания рабочего зарезонансного режима вибрационной машины прототип решает за счет эффекта самосинхронизации, что накладывает определенные условия на конструкцию вибрационной машины, а именно на параметры дебалансных вибровозбудителей или их расположение.
Задачей, решаемого изобретения, является расширение арсенала средств и создание устройства управления вибрационной машиной с двумя дебалансными вибровозбудителями, обеспечивающего эффективное управление. Достигаемый технический результат - повышение скорости достижения околорезонансной зоны на этапе начального разгона и преодоление зоны резонанса в тех случаях, когда величины крутящих моментов двигателей недостаточны, путем применения принципа раскачки (когда моменты сил инерции совпадают по направлению с крутящими моментами двигателей, двигатели включены, иначе - выключены).
Поставленная задача решается тем, что заявляемое устройство управления вибрационной машиной с двумя дебалансными вибровозбудителями имеет две идентичные цепи управления работой электродвигателей вибровозбудителей, а также общие элементы для обеих цепей; последовательно соединенные сумматор с двумя входами, общий компаратор, подсоединенный к S-входу RS триггера 5. При этом:
- первая цепь управления содержит: первый датчик угловой скорости, расположенный на валу первого электродвигателя, первую RC-цепочку, к выходу которой подсоединен инвертирующий вход первого компаратора, последовательно соединенные первый умножитель и второй умножитель, а также содержит первое реле управления, управляющее работой первого электродвигателя. При этом выход первого датчика угловой скорости соединен с неинвертирующим входом первого компаратора, с входом первой RC-цепочки и обоими входами первого умножителя, выход которого подсоединен к входу второго умножителя,
- вторая цепь управления содержит: второй датчик угловой скорости, расположенный на валу второго электродвигателя, вторую RC-цепочку, к выходу которой подсоединен инвертирующий вход второго компаратора, последовательно соединенные третий умножитель и четвертый умножитель, а также содержит второе реле управления, управляющее работой второго электродвигателя. При этом выход второго датчика угловой скорости соединен с неинвертирующим входом второго компаратора, с входом второй RC-цепочки, с обоими входами третьего умножителя, выход которого подсоединен к входу четвертого умножителя.
Выходы второго и четвертого умножителей подсоединены к первому и второму входам сумматора соответственно, выход RS триггера подсоединен к первым входам первого реле управления и второго реле управления соответственно, выходы первого и второго компараторов подсоединены ко вторым входам первого реле управления и второго реле управления соответственно.
Для того, чтобы лучше продемонстрировать отличительные особенности изобретения, в качестве примера, не имеющего какого-либо ограничительного характера, ниже описан предпочтительный вариант реализации.
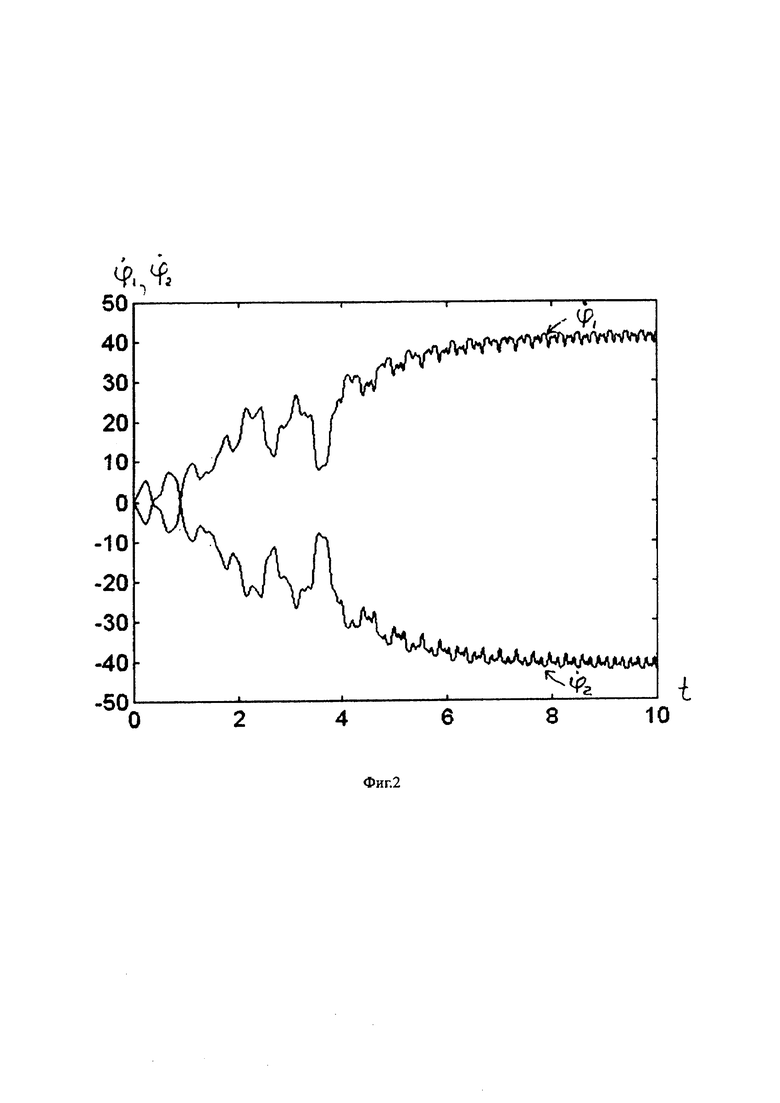
Пример реализации иллюстрируется фигурами чертежей, на которых представлено: Фиг. 1 - схема заявляемого устройства управления, Фиг. 2 - график зависимости угловых скоростей дебалансных вибровозбудителей от времени, полученный в результате испытаний.
На чертеже (Фиг. 1.) представлена вибрационная машина с двумя дебалансными вибровозбудителями 1.1 и 1.2 и устройство управления, имеющее две идентичные цепи управления работой электродвигателей (2.1 - первый электродвигатель, 2.2 -второй электродвигатель), соответственно. В представленной схеме идентичные элементы цепей обозначены индексами 1 и 2 соответственно индексам электродвигателей. Также устройство управления содержит общие элементы для обеих цепей - последовательно соединенные: сумматор 3 с двумя входами, общий компаратор 4, подсоединенный к S входу и RS триггер 5.
Первая цепь управления (управление электродвигателем 2.1) содержит: первый датчик 6.1 угловой скорости, расположенный на валу первого электродвигателя 2.1, первую RC-цепочку 7.1, к выходу которой подсоединен инвертирующий вход первого компаратора 8.1, последовательно соединенные первый умножитель 9.1 и второй умножитель 10.1, а также первое реле управления 11.1, управляющее работой первого электродвигателя 2.1. Выход первого датчика угловой скорости 6.1 соединен с неинвертирующим входом первого компаратора 8.1, с входом первой RC-цепочки 7.1, с обоими входами первого умножителя 9.1, выход которого подсоединен к входу второго умножителя 10.1.
Вторая цепь управления (управление электродвигателем 2.2) содержит: второй датчик 6.2 угловой скорости, расположенный на валу второго электродвигателя 2.2, вторую RC-цепочку 7.2, к выходу которой подсоединен инвертирующий вход второго компаратора 8.2, последовательно соединенные третий умножитель 9.2 и четвертый умножитель 10.2, а также второе реле управления 11.2, управляющее работой второго электродвигателя 2.2. Выход второго датчика угловой скорости 6.2 соединен с неинвертирующим входом второго компаратора 8.2, с входом второй RC-цепочки 7.2, с обоими входами третьего умножителя 9.2, выход которого подсоединен к входу четвертого умножителя 10.2.
Выходы второго и четвертого умножителей 10.1 и 10.2 подсоединены к первому и второму входам сумматора 3 соответственно. Выход RS-триггера 5 подсоединен к первым входам первого реле управления 11.1 и второго реле управления 11.2 соответственно. Выходы первого и второго компараторов 8.1 и 8.2 подсоединены ко вторым входам первого реле управления 11.1 и второго реле управления 11.2, соответственно, при этом R-вход RS-триггера 5, предназначен для подключения к кнопке включения вибрационной машины.
Элементы вибрационной машины, включая дебалансные вибровозбудители 1.1 и 1.2, электродвигатели 2.1 и 2.2, и систему управления установлены на платформе 12, упруго соединенной с неподвижным основанием 13.
Устройство управления работает следующим образом
Сигнал с первого датчика 6.1 угловой скорости (ϕ1) подается на первую RC-цепочку 7.1, оба входа первого умножителя 9.1 и неинвертирующий вход первого компаратора 8.1. Сигнал со второго датчика 6.2 угловой скорости (ϕ2) подается на вторую RC-цепочку 7.2, оба входа второго умножителя 9.2 и неинвертирующий вход второго компаратора 8.2. Сигнал (ψ1)c первой RC-цепочки 7.1 подается на инвертирующий вход первого компаратора 8.1. Сигнал (ψ2) со второй RC-цепочки 7.2 подается на инвертирующий вход второго компаратора 8.2. Сигнал с выхода первого умножителя 9.1 подается на вход второго умножителя 10.1. Сигнал с выхода третьего умножителя 9.2, подается на вход четвертого умножителя 10.2. Сигналы с выходов третьего и четвертого умножителей 10.1 и 10.2 подаются на первый и второй входы сумматора 3, соответственно. Сигнал с выхода сумматора 3 подается на вход общего компаратора 4. Сигнал с выхода общего компаратора 4 подается на RS-триггер 5. Сигналы с выходов первого компаратора 8.1 и RS-триггера 5 подаются на входы первого управляющего реле 11.1 первого электродвигателя 2.1. Сигналы с выходов второго компаратора 8.2 RS-триггера 5 подаются на входы второго управляющего реле 11.2 второго электродвигателя 2.2 Реле 11.1 и 11.2 подают сигналы о включении/выключении двигателей 2.1 и 2.2 соответственно.
Первая и вторая RC-цепочки 7.1 и 7.2 являются фильтрами нижних частот и отсекают быстроосциллирующую составляющую колебаний в околорезонансной зоне. Постоянная времени RC-цепочки должна превышать период резонансных колебаний, но, в то же время, слишком большие ее значения приводят к замедлению работы устройства.
Первый компаратор 8.1 сравнивает текущее значение угловой скорости первого ротора с его отфильтрованной («медленной») составляющей. Если значение угловой скорости выше, то на вход первого управляющего реле 11.1 подается «1» (сигнал высокого уровня), если ниже - то «0» - сигнал низкого уровня.
Второй компаратор 8.2 сравнивает текущее значение угловой скорости второго ротора с его отфильтрованной («медленной») составляющей. Если значение угловой скорости выше, то на вход второго управляющего реле 11.2 подается «1», если ниже - то «0».
Первый и третий умножители 9.1 и 9.2 возводят в квадрат сигналы, соответствующие величинам угловых скоростей первого и второго ротора, соответственно.
Во втором умножителе 10.1 происходит умножение входного сигнала на величину, соответствующую полумассе первого вибровозбудителя 1.1 (m1/2).
В четвертом умножителе 10.2 происходит умножение входного сигнала на величину, соответствующую полумассе второго вибровозбудителя 1.2 (m2/2).
Первое управляющее реле 11.1 реализует логическую операцию ИЛИ. Если хотя бы один из сигналов на входе равен единице, то на первый электродвигатель 2.1 передается сигнал о включении («1»), если на обоих входах реле «0», то на первый электродвигатель 2.1 передается сигнал о выключении («0»).
Второе управляющее реле 11.2 реализует логическую операцию ИЛИ. Если хотя бы один из сигналов на входе равен единице, то на второй электродвигатель 2.2 передается сигнал о включении («1»), если на обоих входах реле «0», то на второй электродвигатель 2.2 передается сигнал о выключении («0»).
Сумматор 3 в реальном времени рассчитывает суммарную кинетическую энергию вращающихся роторов по формуле  , где m1 m2 - массы первого и второго роторов.
, где m1 m2 - массы первого и второго роторов.
Общий компаратор 4 сравнивает сигнал, полученный с сумматора 3, с величиной, соответствующей заранее заданному суммарному значению кинетической энергии роторов, означающему прохождение зоны резонанса (H1). Если Н>H1 то на S-вход RS-триггера 5 подается сигнал «1».
На R-вход RS-триггера 5 при включении вибрационной машины подается сигнал «1» от кнопки включения вибрационной машины (на Фиг. 1 не показано), чтобы сбросить значение на выходе триггера в «0». В процессе работы установки после прохождения зоны резонанса на S-вход RS-триггера подается сигнал «1», в результате значение на выходе триггера становится равным логической единице («1») и сохраняется до выключения машины
Между пуском и достижением околорезонансной зоны угловые скорости роторов в среднем растут, а кинетическая энергия ниже желаемой (с RS-триггера 5 на первое и второе управляющие реле 11.1 и 11.2 передается сигнал «0»). При использовании сравнительно мощных электродвигателей угловые скорости растут постоянно (с первого и второго компараторов 8.1 и 8.2 на первое и второе управляющие реле 11.1 и 11.2, соответственно, передаются сигналы «1» постоянно). Оба двигателя непрерывно включены. При использовании менее мощных электродвигателей пуск затруднен из-за высокого статического момента вибровозбудителей. Для его преодоления устройство один или несколько раз выключает электродвигатели при снижении угловых скоростей дебалансных вибровозбудителей (в те моменты, когда с первого и второго компараторов 8.1 и 8.2 на первое и второе управляющие реле 11.1 и 11.2, соответственно, передаются сигналы «0»). При дальнейшем увеличении угловых скоростей с первого и второго компараторов 8.1 и 8.2 на первое и второе управляющие реле 11.1 и 11.2, соответственно, передаются сигналы «1», и электродвигатели снова включаются.
Принцип действия устройства в околорезонансной зоне основан на методе скоростного градиента. Известно, что вблизи зоны резонанса размах колебаний центра масс ротора возрастает, а само движение центра масс разделяется на быструю и медленную составляющую [4. И.И. Блехман, Д.А. Индейцев, А.Л. Фрадков. Медленные движения в системах с инерционным возбуждением вибраций. Проблемы машиностроения и надежности машин. 2008, 1, с. 25-32]. При этом дальнейшему увеличению скоростей вращения роторов препятствует перетекание энергии вращения роторов в энергию колебательного движения центра масс (эффект Зоммерфельда). Решение заключается в увеличении энергии вращательного движения путем увеличения энергии медленного движения при подавлении быстроосциллирующей составляющей движения ротора с помощью RC-цепочек. Иными словами, для преодоления зоны резонанса используется раскачка колебаний: если скорость ротора растет, то соответствующий электродвигатель включается, а если скорость ротора падает, то электродвигатель выключается. С первого и второго компараторов 8.1 и 8.2 на первое и второе управляющие реле 11.1 и 11.2, соответственно, передаются сигналы «1» и «0» с некоторыми промежутками времени, определяемыми устройством. С RS-триггера 5 на первое и второе управляющие реле 11.1 и 11.2 передается сигнал «0».
Наконец, при достижении зарезонансной зоны с RS-триггера 5 на первое и второе управляющие реле 11.1 и 11.2 передается сигнал «1». Таким образом, оба двигателя непрерывно включены.
Устройство апробировано на экспериментальной двухроторной мехатронной вибрационной установке СВ-2М [5. Андриевский Б.Р., Блехман И.И., Блехман Л.И., Бойков В.И., Васильков В.Б., Фрадков А.Л. Учебно-исследовательский мехатронный комплекс для исследования вибрационных устройств и процессов // Проблемы машиностроения и надежности машин, 2016, №4, 90-97] с одинаковыми роторами. Измерение угловых скоростей роторов выполняется энкодерами марки E30S4-1000-6L-5. Параметры установки: J1=J2=0.014 [кг⋅м2] - момент инерции несбалансированных роторов, m1=m2=1.5 [кг] - массы роторов, М=9 [кг] - масса платформы. ε1=ε2=0.04 [м] - эксцентриситеты центров масс роторов, с=5300 [Н/м] и сх=1300 [Н/м] - жесткость пружин по вертикальной и горизонтальной осям, соответственно. М1=М2=0.42 [Н⋅м] - крутящие моменты электродвигателей Частота собственных колебаний установки ω=18[1/с].
Значения постоянных времени RC-цепочек 0.45 с. Значение уровня энергии H1=1350 Дж, что соответствует угловым скоростям роторов, равным 30 1/с.
На Фиг. 2 представлены результаты испытаний: график зависимости угловых скоростей дебалансных вибровозбудителей от времени. На роторы действуют крутящие электромеханические моменты двигателей, направленные противоположно им моменты сопротивления роторов, возникающие из-за вязкого трения в подшипниках, собственные моменты роторов, обусловленные силой тяжести и моменты, обусловленные воздействием платформы, которые могут как совпадать по направлению с крутящими моментами двигателей, так и действовать противонаправленно. Предложенное устройство осуществляет разгон роторов до зоны резонанса, определяемой собственной частотой колебаний платформы и преодоление зоны резонанса на основе принципа раскачки: когда моменты сил инерции совпадают по направлению с крутящими моментами двигателей, двигатели включены, иначе - выключены. Для пояснения процесса можно привести аналогию и рассматривать предлагаемую раскачку как раскачку маятника, когда воздействие прилагается только в том случае, когда сила инерции совпадает по знаку с силой прилагаемого воздействия, с той лишь разницей, что вибрационная машина представляет собой более сложное устройство, и природа возникающих сил описывается более сложными законами. Предложенное устройство позволяет быстрее достичь околорезонансной зоны на этапе начального разгона и, что более важно, преодолеть зону резонанса в тех случаях, когда величины крутящих моментов двигателей недостаточны для преодоления зоны резонанса без применения предложенного устройства.
Видно, что на этапе начального разгона вибровозбудителей, в промежутке времени примерно с нулевой до второй секунды, двигатели два раза выключаются и включаются, далее установка достигает околорезонансной зоны, когда скорость вращающихся роторов близка к частоте собственных колебаний машины, и возможно «застревание» угловых скоростей роторов (эффект Зоммерфельда). Между второй и четвертой секундой происходит раскачка колебаний около резонансной частоты, двигатели дважды выключаются и включаются. Далее машина достигает зарезонансной зоны и переходит в рабочий режим, двигатели непрерывно включены.
Таким образом, изобретение позволяет эффективно управлять пуском, преодолением зоны резонанса и выходом в зарезонансный рабочий режим вибрационной машине с двумя дебалансными вибровозбудителями. Следствием является существенное снижение металлоемкость конструкции, а также снижение энергозатрат при разгоне роторов, и, следовательно, увеличивает КПД машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления двухроторной вибрационной установкой | 2023 |
|
RU2814415C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЕБАЛАНСНЫМ ВИБРОВОЗБУДИТЕЛЕМ | 2015 |
|
RU2579456C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЕРМОТРАНСФОРМАТОРНОЙ УСТАНОВКОЙ | 1991 |
|
RU2006758C1 |
| Устройство для контроля восприимчивости радиоприемников по побочным каналам приема | 1986 |
|
SU1383511A1 |
| Устройство для контроля чувствительности побочных каналов в радиоприемнике | 1986 |
|
SU1378073A1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2067053C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| Стабилизированный источник напряжения | 1987 |
|
SU1476449A1 |
| СПОСОБ ПУСКА ВИБРАЦИОННОЙ МАШИНЫ С ДВУМЯ САМОСИНХРОНИЗИРУЮЩИМИСЯ ДЕБАЛАНСНЫМИ ВИБРОВОЗБУДИТЕЛЯМИ | 2012 |
|
RU2516262C2 |
| СТАБИЛИЗИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2002 |
|
RU2235353C2 |

Предложенное изобретение относится к вибрационной технике и может использоваться в горнодобывающей промышленности, обрабатывающей промышленности и промышленности строительных материалов в качестве устройства управления для грохотов и сит с двумя дебалансными вибровозбудителями. Устройство управления вибрационной машиной с двумя дебалансными вибровозбудителями, характеризующееся тем, что имеет две идентичные цепи управления работой электродвигателей вибровозбудителей, а также общие элементы для обеих цепей: последовательно соединенные сумматор с двумя входами, общий компаратор, подсоединенный к S-входу RS-триггера. Первая цепь управления содержит: первый датчик угловой скорости, расположенный на валу первого электродвигателя, первую RC-цепочку, к выходу которой подсоединен инвертирующий вход первого компаратора, последовательно соединенные первый умножитель и второй умножитель, а также первое реле управления, управляющее работой первого электродвигателя. Выход первого датчика угловой скорости соединен с неинвертирующим входом первого компаратора, с входом первой RC-цепочки и обоими входами первого умножителя, выход которого подсоединен к входу второго умножителя. Вторая цепь управления содержит: второй датчик угловой скорости, расположенный на валу второго электродвигателя, вторую RC-цепочку, к выходу которой подсоединен инвертирующий вход второго компаратора, последовательно соединенные третий умножитель и четвертый умножитель, а также второе реле управления, управляющее работой второго электродвигателя. Выход второго датчика угловой скорости соединен с неинвертирующим входом второго компаратора, с входом второй RC-цепочки, с обоими входами третьего умножителя, выход которого подсоединен к входу четвертого умножителя. Выходы второго и четвертого умножителей подсоединены к первому и второму входам сумматора, соответственно, выход RS триггера подсоединен к первым входам первого реле управления и второго реле управления, соответственно. Выходы первого и второго компараторов подсоединены ко вторым входам первого реле управления и второго реле управления, соответственно. R-вход RS-триггера предназначен для подключения к кнопке включения вибрационной машины. Технический результат – обеспечение эффективного управления пуском, преодолением зоны резонанса и выходом в зарезонансный рабочий режим вибрационной машине с двумя дебалансными вибровозбудителями. 2 ил.
Устройство управления вибрационной машиной с двумя дебалансными вибровозбудителями, характеризующееся тем, что имеет две идентичные цепи управления работой электродвигателей вибровозбудителей, а также общие элементы для обеих цепей: последовательно соединенные сумматор с двумя входами, общий компаратор, подсоединенный к S-входу RS-триггера, при этом:
- первая цепь управления содержит: первый датчик угловой скорости, расположенный на валу первого электродвигателя, первую RC-цепочку, к выходу которой подсоединен инвертирующий вход первого компаратора, последовательно соединенные первый умножитель и второй умножитель, а также первое реле управления, управляющее работой первого электродвигателя, при этом выход первого датчика угловой скорости соединен с неинвертирующим входом первого компаратора, с входом первой RC-цепочки и обоими входами первого умножителя, выход которого подсоединен к входу второго умножителя,
- вторая цепь управления содержит: второй датчик угловой скорости, расположенный на валу второго электродвигателя, вторую RC-цепочку, к выходу которой подсоединен инвертирующий вход второго компаратора, последовательно соединенные третий умножитель и четвертый умножитель, а также второе реле управления, управляющее работой второго электродвигателя, при этом выход второго датчика угловой скорости соединен с неинвертирующим входом второго компаратора, с входом второй RC-цепочки, с обоими входами третьего умножителя, выход которого подсоединен к входу четвертого умножителя,
при этом выходы второго и четвертого умножителей подсоединены к первому и второму входам сумматора, соответственно, выход RS триггера подсоединен к первым входам первого реле управления и второго реле управления, соответственно, выходы первого и второго компараторов подсоединены ко вторым входам первого реле управления и второго реле управления, соответственно, при этом R-вход RS-триггера предназначен для подключения к кнопке включения вибрационной машины.
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ПРИВОДОВ ВИБРОСИТА | 2009 |
|
RU2402387C1 |
| Устройство управления вибрационным грохотом | 1984 |
|
SU1209317A1 |
| Засыпное устройство для доменной печи | 1959 |
|
SU127271A1 |
| Способ управления системой приводов вибросита | 2017 |
|
RU2649203C1 |
| СПОСОБ ПУСКА ВИБРАЦИОННОЙ МАШИНЫ С ДВУМЯ САМОСИНХРОНИЗИРУЮЩИМИСЯ ДЕБАЛАНСНЫМИ ВИБРОВОЗБУДИТЕЛЯМИ | 2012 |
|
RU2516262C2 |
| Способ управления резонансным режимом дебалансной вибрационной машины | 1987 |
|
SU1589258A1 |
| WO 2007014444 A1, 08.02.2007. | |||

