Изобретение относится к технике управления дорожными транспортными средствами (ТС) и касается обеспечения безопасности движения ТС.
В настоящее время безопасность движения ТС, в частности автомобиля, обеспечивается, как правило, визуально водителем из расчета, что водитель самостоятельно обязан оценить ситуацию перед автомобилем и обеспечить такой выбор параметров движения (скорость, полосу движения и т.д.), при которых исключается столкновение с другим ТС или препятствием, или пешеходом. Однако это сопряжено с неудобством и часто неадекватным выбором параметров движения ТС.
Для качественной оценки фронтальной ситуации, то есть дорожно-транспортной ситуации перед автомобилем, получили распространение автоматизированные средства по предупреждению водителя, а также корректированию движения автомобиля в случаях изменения параметров движения движущегося впереди ТС. Такие средства обычно основаны на использовании лазерных радаров, с помощью которых определяется расстояние до движущегося впереди ТС и его скорость, а также на сопоставлении последней со скоростью преследующего ТС (DE 102005008715 A1, G01S 13/93, 31.08.2006; US 2007/0146684 A1, G01C 3/08, 28.06.2007). Известные средства данного назначения имеют ограниченную область практического применения, охватывающую лишь контроль фронтально расположенного или движущегося препятствия.
Известны также технические решения по предупреждению столкновения ТС с объектом, перемещающимся в переднебоковой зоне ТС в направлении, пересекающем траекторию движения ТС. Эти решения базируются на измерении расстояния до указанного объекта и его скорости через определенные промежутки времени с последующей оценкой вероятности столкновения объекта с ТС и проведением мероприятий по его исключению (JP 2008062873, B60W 30/08, 21.03.2008; RU 2007107698 A, B60R 21/00, 10.09.2008 - прототип).
Однако названные выше патентные источники фактически характеризуются лишь постановкой задачи и не обеспечивают ее решение, поскольку составные операции изложенных в них способов обобщены до утраты определенности.
Настоящее изобретение направлено на обеспечение эффективного контроля за перемещением объектов в переднебоковой зоне, если направление этого перемещения пересекает траекторию движения ТС. Достигаемый при этом технический результат заключается в повышении безопасности движения за счет обеспечения превентивного оповещения водителя о возникающем в переднебоковой зоне движущемся препятствии и соответствующего управления параметрами движения ТС.
Указанный технический результат достигается заявленным способом предупреждения столкновения ТС с объектом, перемещающимся в переднебоковой зоне ТС в направлении, пересекающем траекторию движения ТС, согласно которому при помощи отражающего излучения или/и видеонаблюдения определяют со сдвигом по времени положения перемещающегося объекта и расстояния между ним и ТС, по полученным положениям перемещающегося объекта и расстояниям между ним и ТС определяют скорость и направление перемещения объекта, по полученным значению скорости и направлению перемещения объекта прогнозируют точку пересечения объектом траектории движения ТС и время, оставшееся до этого пересечения, по полученным данным и известной скорости движения ТС прогнозируют точку нахождения ТС на траектории движения в момент пересечения перемещающимся объектом траектории движения ТС и в случае расположения прогнозируемой точки нахождения ТС на траектории движения в прогнозируемой точке пересечения или ее окрестности оповещают водителя ТС или/и перемещающийся объект звуковым или/и световым предупредительными сигналами.
Достижению технического результата способствуют частные существенные признаки изобретения.
Скорость перемещения объекта с ТС определяют непрерывно и при ее изменении повторяют все последующие операции способа.
В случае расположения прогнозируемой точки нахождения ТС на траектории движения в окрестности прогнозируемой точки пересечения увеличивают или уменьшают скорость движения ТС до величины, обеспечивающей расстояние между прогнозируемыми точками, гарантированно исключающее столкновение ТС с перемещающимся объектом.
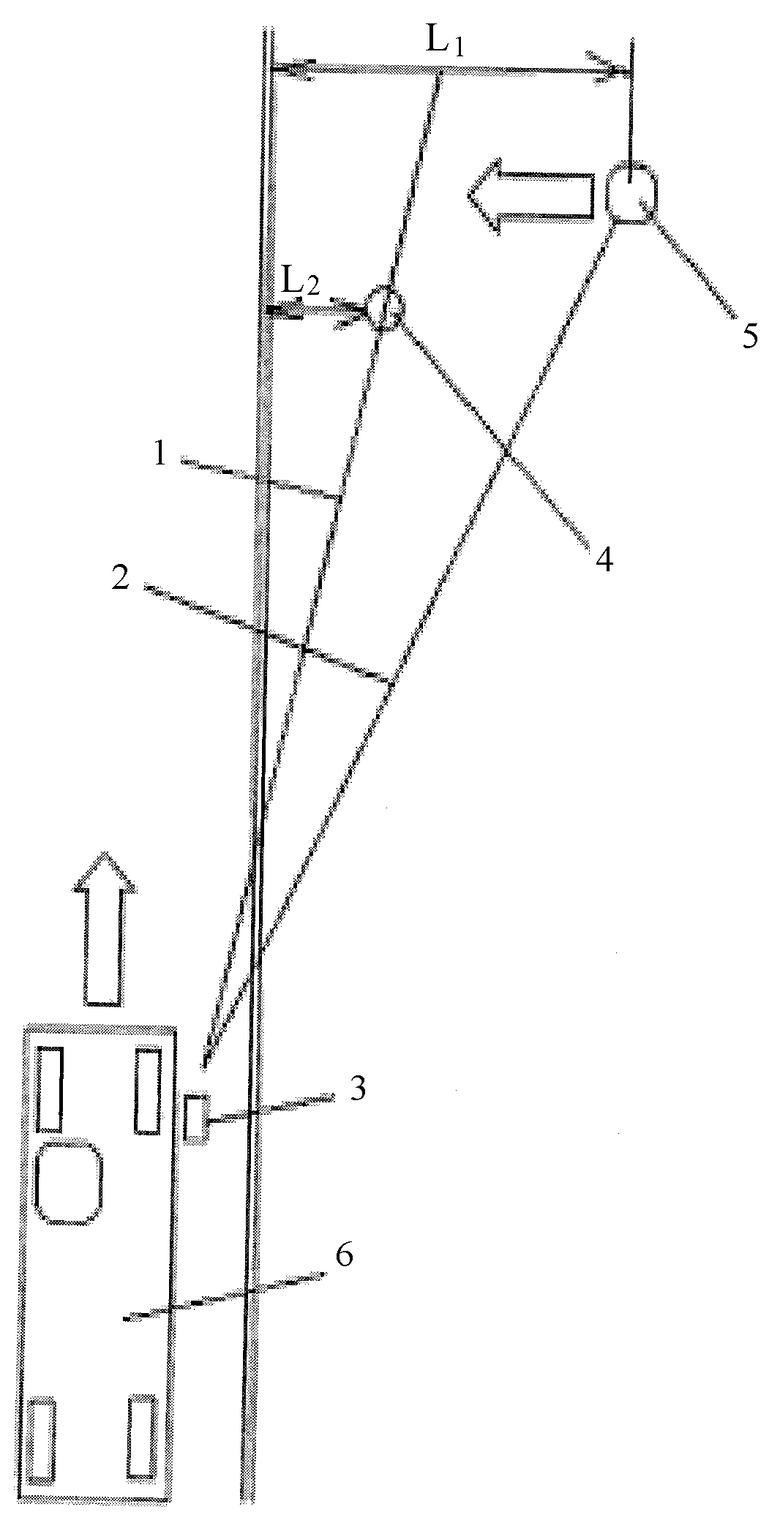
Настоящее изобретение поясняется конкретным примером, для которого на чертеже показана схема излучения с ТС пары сигналов в течение заданного промежутка времени. Этот пример не является единственно возможным, но наглядно демонстрирует возможность достижения приведенной совокупностью признаков требуемого технического результата.
На схеме обозначены: световые сигналы 1 и 2, источник излучения 3, положения 4 и 5 объекта, перемещающегося в переднебоковой зоне ТС в направлении, пересекающем траекторию движения ТС и движущееся ТС 6.
Заявленный способ, как уже отмечалось, предназначен для фронтально возникающих препятствий, особенно тех препятствий, которые возникают сбоку автомобиля и могут быть потенциально опасными. Это касается таких движущихся объектов (ТС или пешеходов), которые пересекают (приближаются с целью пересечения к) траекторию движения ТС. Необходимость контроля за такими объектами наиболее актуальна в условиях плохого освещения дорог или отсутствия освещения вообще. В темное время суток освещенность дороги обеспечивается только передними фарами автомобиля и при отсутствии дорожного освещения фонарными столбами водитель не всегда может видеть приближающегося к дороге или идущего по обочине дороги пешехода.
Заявленный способ предусматривает информирование водителя о возникающем с правой или с левой стороны движущегося автомобиля препятствии или помехе, перемещающемся в направлении траектории движения автомобиля. Если в дневное время водитель визуально может оценить ситуацию впереди автомобиля и потенциально оценить степень ее опасности, то в ночное время или в условиях плохой видимости возможность визуального контроля событий, происходящих в боковых зонах автомобиля, практически отсутствует или становится невозможной. Более того, даже при хорошей видимости при внезапном появлении пешехода в опасной зоне и, учитывая то, что большинство водителей правши и классическая поза за рулем: левая рука на руле в положении «12 часов», а правая - на рычаге КПП, в экстренной ситуации среднестатистический водитель может вообще не успеть подать предупреждающий сигнал, поскольку правой рукой перехватывается руль для совершения объезжающего маневра.
В этих случаях возможно использование заявленного способа.
При помощи отражающего излучения определяют со сдвигом по времени положения перемещающегося объекта и расстояния между ним и ТС. Устройства лазерных дальномеров, позволяющие установить координатные параметры объекта, известны и относятся к конструкциям, которые хорошо освоены современными технологиями (RU 2091711, G01C 3/00, 27.09.1997; RU 2082090 C1, G01C 3/00, 20.06.1997).
По полученным положениям перемещающегося объекта и расстояниям между ним и ТС определяют скорость и направление перемещения объекта. Определение скорости перемещения объекта и направления его траектории также являются отдельно известными решениями (RU 2292527 C1, G01C 23/00, 27.01.2007; RU 2268498 C2, G01B 11/24, 20.01.2006).
По полученным значению скорости и направлению перемещения объекта с помощью несложных геометрических построений и аналитических расчетов, выполняемых, например, с помощью процессора, прогнозируют точку пересечения объектом траектории движения ТС и время, оставшееся до этого пересечения.
По полученным данным и известной скорости движения ТС прогнозируют точку нахождения ТС на траектории движения в момент пересечения перемещающимся объектом траектории движения ТС.
В случае расположения прогнозируемой точки нахождения ТС на траектории движения до или после прогнозируемой точки пересечения на расстоянии, гарантированно исключающем столкновение ТС с перемещающимся объектом, продолжают движение ТС с той же скоростью.
В случае расположения прогнозируемой точки нахождения ТС на траектории движения в окрестности прогнозируемой точки пересечения оповещают водителя ТС или/и перемещающийся объект звуковым или/и световым предупредительными сигналами и принимают меры по предотвращению столкновения ТС с объектом, например увеличивают или уменьшают скорость движения ТС до величины, обеспечивающей расстояние между прогнозируемыми точками, гарантированно исключающее такое столкновение.
Скорость перемещения объекта с ТС определяют непрерывно и при ее изменении повторяют все последующие операции способа.
Как показано на чертеже, сигнал излучения с ТС выдают во внешнюю среду в течение заданного промежутка времени, по крайней мере, в двух направлениях под разными углами в горизонтальной плоскости относительно продольной оси ТС.
Предупредительный сигнал водителю, а также пешеходу о возникающей опасности выдается на звуковое или световое устройства ТС. Возможно формирование управляющего сигнала, который будет поступать на блок управления параметрами автомобиля, связанный, например, с системой управления подачей топлива в двигатель или с системой торможения автомобиля для снижения скорости или, наоборот, для увеличении скорости, если имеется возможность совершения такого маневра.
По другому варианту реализации способа производится с видеонаблюдение и формирование на экране монитора изображения результатов видеонаблюдения. Видеонаблюдение (в данном варианте под позицией 3 на схеме подразумевается видеокамера) осуществляют в направлении движения ТС в переднебоковой зоне по меньшей мере два раза для формирования двух изображений и отображения на каждом из них объекта, или в течение заданного времени два раза под разными направлениями (разным углом). Далее выполняют сравнение на изображениях координат положения объекта для получения направления и скорости его перемещения в сторону ТС и расстояния до него. Остальные операции способа ничем не отличаются от вышеописанных.
Оба описанных варианта могут использоваться совместно. В этом случае заявленный способ предусматривает излучение во внешнюю среду в направлении движения ТС, по крайней мере, в двух направлениях под разными углами в горизонтальной плоскости относительно продольной оси ТС светового сигнала 1 и 2 в инфракрасном диапазоне с заданной длиной волны, например 960 нм. При помощи видеонаблюдения с установленным на видеокамеру инфракрасным фильтром, пропускающим свет с заданной длиной волны 950 нм, получают отраженный от объекта световой сигнал 4 или 5.
Настоящее изобретение промышленно применимо, так как может быть изготовлено с использованием известных электронных технологий, применяемых для средств электронного контроля.
Новым в предлагаемом способе является новое сочетание отдельных известных решений и их применение в новой совокупности для решения технической задачи по превентивному предупреждению водителя о препятствиях, возникающих с боковых сторона автомобиля в зонах, не поддающихся полноценному контролю со стороны водителя.
Изобретение относится к технике управления дорожными транспортными средствами (ТС) и касается обеспечения безопасности движения ТС. При помощи отражающего излучения или/и видеонаблюдения определяют со сдвигом по времени положения перемещающегося объекта и расстояния между ним и ТС. По полученным положениям перемещающегося объекта и расстояниям между ним и ТС определяют скорость и направление перемещения объекта. По полученным значению скорости и направлению перемещения объекта прогнозируют точку пересечения объектом траектории движения ТС и время, оставшееся до этого пересечения. По полученным данным и известной скорости движения ТС прогнозируют точку нахождения ТС на траектории движения в момент пересечения перемещающимся объектом траектории движения ТС. В случае расположения прогнозируемой точки нахождения ТС на траектории движения в прогнозируемой точке пересечения или ее окрестности оповещают водителя ТС или/и перемещающийся объект звуковым или/и световым предупредительными сигналами. При этом увеличивают или уменьшают скорость движения ТС до величины, обеспечивающей расстояние между прогнозируемыми точками, гарантированно исключающее столкновение ТС с перемещающимся объектом. Изобретение направлено на обеспечение эффективного контроля за перемещением объектов в переднебоковой зоне, если направление этого перемещения пересекает траекторию движения ТС. Достигаемый технический результат заключается в повышении безопасности движения за счет обеспечения превентивного оповещения водителя о возникающем в переднебоковой зоне движущемся препятствии и соответствующего управления параметрами движения ТС. 2 з.п. ф-лы, 1 ил.
1. Способ предупреждения столкновения транспортного средства с объектом, перемещающимся в переднебоковой зоне транспортного средства в направлении, пересекающем траекторию движения транспортного средства, согласно которому
при помощи отражающего излучения или/и видеонаблюдения определяют со сдвигом по времени положения перемещающегося объекта и расстояния между ним и транспортным средством,
по полученным положениям перемещающегося объекта и расстояниям между ним и транспортным средством определяют скорость и направление перемещения объекта,
по полученным значению скорости и направлению перемещения объекта прогнозируют точку пересечения объектом траектории движения транспортного средства и время, оставшееся до этого пересечения,
по полученным данным и известной скорости движения транспортного средства прогнозируют точку нахождения транспортного средства на траектории движения в момент пересечения перемещающимся объектом траектории движения транспортного средства и
в случае расположения прогнозируемой точки нахождения транспортного средства на траектории движения в прогнозируемой точке пересечения или ее окрестности оповещают водителя транспортного средства или/и перемещающийся объект звуковым или/и световым предупредительными сигналами.
2. Способ по п.1, отличающийся тем, что скорость перемещения объекта определяют непрерывно и при ее изменении повторяют все последующие операции способа.
3. Способ по п.1 или 2, отличающийся тем, что в случае расположения прогнозируемой точки нахождения транспортного средства на траектории движения в окрестности прогнозируемой точки пересечения увеличивают или уменьшают скорость движения транспортного средства до величины, обеспечивающей расстояние между прогнозируемыми точками, гарантированно исключающее столкновение транспортного средства с перемещающимся объектом.
| RU 2007107698 А, 10.09.2008 | |||
| JP 2008062873 A, 21.03.2008 | |||
| US 20070146684 A1, 28.06.2007 | |||
| DE 102005008715 A1, 31.08.2006. |

