Изобретение относится к системам обеспечения безопасности эксплуатации транспортных средств (ТС).
В настоящее время безопасность движения ТС, в частности автомобиля, обеспечивается, как правило, водителем в предположении, что водитель обязан самостоятельно оценить ситуацию вокруг автомобиля и обеспечить такой выбор параметров движения (скорость, полосу движения и т.д.), при которых исключается столкновение с другим ТС или препятствием, или пешеходом. Однако это создает большую нагрузку на водителя и опасно неадекватным выбором параметров движения ТС.
Для оценки дорожно-транспортной ситуации в зоне перед автомобилем получили распространение автоматизированные средства по предупреждению водителя, а также корректированию движения автомобиля в случаях изменения параметров движения движущегося впереди ТС. Такие средства обычно основаны на использовании лазерных радаров, с помощью которых определяются расстояние до движущегося впереди ТС и его скорость, а также на сопоставлении последней со скоростью преследующего ТС (DE 102005008715 A1, G01S 13/93, 31.08.2006; US 2007/0146684 A1, G01C 3/08, 28.06.2007). Известные средства данного назначения имеют ограниченную область практического применения, охватывающую лишь контроль фронтально расположенного или движущегося препятствия.
Известны также технические решения по предупреждению столкновения ТС с препятствием, перемещающимся в переднебоковой зоне ТС в направлении, пересекающем траекторию движения ТС. Эти решения базируются на измерении расстояния до указанного препятствия и его скорости через определенные промежутки времени с последующей оценкой вероятности столкновения препятствия с ТС и проведением мероприятий по его исключению (JP 2008062873, B60W 30/08, 21.03.2008; RU 2007107698 A, B60R 21/00, 10.09.2008).
Известно изобретение (RU 2402445 B60W 030/08, 27/10/2010; прототип), которое направлено на обеспечение эффективного контроля за перемещением препятствий в переднебоковой зоне, если направление этого перемещения пересекает траекторию движения ТС. Достигаемый при этом технический результат заключается в повышении безопасности движения за счет обеспечения превентивного оповещения водителя о возникающем в переднебоковой зоне движущемся препятствии и соответствующего управления параметрами движения ТС.
Настоящее изобретение предназначено для повышения безопасности эксплуатации транспортного средства во время движения за счет контроля дорожно-транспортной ситуации вокруг автомобиля и выработки управляющих сигналов на исполнительные механизмы ТС.
Указанный технический результат достигается заявленным способом предупреждения столкновения ТС с динамическим препятствием, перемещающимся в передней зоне ТС в направлении, пересекающем траекторию движения ТС, согласно которому при помощи полученных и обработанных сигналов ультразвуковых датчиков, лазерного дальномера и информации системы технического зрения оценивается расстояние до перемещающегося препятствия, его скорость передвижения и размеры препятствия, по полученным данным и известной скорости движения ТС, а также с учетом сигналов датчиков, контролирующих боковые и заднебоковые зоны ТС, прогнозируют точку нахождения ТС на траектории движения в момент пересечения динамическим препятствием траектории движения ТС и в случае расположения прогнозируемой точки нахождения ТС на траектории движения в прогнозируемой точке пересечения или ее окрестности происходит расчет траектории путем передачи информации в блок выработки управляющих сигналов, которые затем передаются на исполнительные механизмы ТС, включающие в себя тормозную систему ТС, систему управления двигателем и систему рулевого управления, и выполнение оптимального маневра для предотвращения столкновения ТС с динамическим препятствием и недопущения возникновения новых столкновений ТС с препятствиями, находящимися или движущимися на соседних полосах движения.
Настоящее изобретение поясняется примером, изображенным на фиг.1, на котором показана схема излучения нескольких датчиков, установленных на борту автомобиля, во время движения ТС (1). Заявленный способ предполагает наличие следующих датчиков, обозначенных на фиг.1: ультразвуковые датчики и/или система технического зрения (4), контролирующие появление динамического препятствия (2) в передней зоне ТС (1) и его поперечную скорость перемещения, ультразвуковые датчики и/или система технического зрения (3), контролирующие наличие транспортных средств и иных препятствий в заднебоковой и задней зонах ТС (1), а также лазерный дальномер (5), позволяющий с повышенной точностью оценивать расстояние до препятствия (2), находящегося в передней зоне ТС, и его скорость перемещения. Представленный пример не является единственно возможным, но наглядно демонстрирует возможность достижения приведенной совокупностью признаков требуемого технического результата.
По полученным данным с датчиков, контролирующих переднюю зону ТС, и известной скорости движения ТС прогнозируют точку нахождения ТС на траектории движения в момент пересечения динамическим препятствием траектории движения ТС.
В случае расположения прогнозируемой точки нахождения ТС на траектории движении до или после точки пересечения на расстоянии, гарантированно исключающем столкновение ТС с динамическим препятствием, продолжают движение с той же скоростью.
В случае расположения прогнозируемой точки нахождения ТС на траектории движения в окрестности прогнозируемой точки пересечения оповещают водителя ТС или/и динамическое препятствие звуковым или/и световым предупредительным сигналами и принимают меры по предотвращению столкновения ТС с динамическим препятствием.
Заявленный способ предполагает следующий алгоритм работы системы предотвращения столкновения ТС с динамическим препятствием: сигналы ультразвуковых датчиков и системы технического зрения, контролирующих появления препятствия в передней зоне ТС, передаются в блок определения дальности до препятствия и скорости сближения ТС с динамическим препятствия, если в результате расчетов возникает опасность столкновения, формируется световое или/и звуковое предупреждение водителя ТС или/и препятствия. Одновременно определяется возможность уклонения от лобового столкновения и расчет оптимальной траектории ухода от столкновения, при этом учитывается скорость движения ТС, скорость сближения ТС и препятствия, параметры препятствия, наличие и поведение других препятствий в заднебоковой и задней зонах ТС благодаря сигналам ультразвуковых датчиков и/или системы технического зрения, контролирующих заднебоковую и заднюю зоны ТС. Если уклонение возможно, то производится расчет траектории и эта информация передается в блок выработки управляющих сигналов, подающихся на исполнительные механизмы ТС, такие как: тормозная система ТС, система управления двигателем и система рулевого управления. Сигналы ультразвуковых датчиков и/или системы технического зрения, контролирующих заднебоковую и заднюю зоны ТС, могут ограничить выполнение маневра в том случае, если соседняя полоса движения занята, причем эти датчики контролируют наличие постороннего транспортного средства, в том числе и в «слепой» зоне автомобиля.
Новым в предлагаемом способе является сочетание известных технических решений по определению динамического препятствия, находящегося на траектории движения ТС, и технических решений по способам уклонения от столкновения и их применение, направленное на решение технической задачи по предупреждению и предотвращению столкновения транспортного средства с динамическим препятствием.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ОБЪЕКТОМ, ПЕРЕМЕЩАЮЩИМСЯ В ПЕРЕДНЕБОКОВОЙ ЗОНЕ ТРАНСПОРТНОГО СРЕДСТВА В НАПРАВЛЕНИИ, ПЕРЕСЕКАЮЩЕМ ТРАЕКТОРИЮ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2402445C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ДОРОЖНОЙ СИТУАЦИЕЙ С ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2432276C1 |
| Способ предотвращения столкновений со встречным препятствием на полосе движения | 2022 |
|
RU2788652C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| Способ и интеллектуальная система обеспечения безопасности средств индивидуальной мобильности | 2024 |
|
RU2829379C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ УЧАСТНИКОВ ДОРОЖНОГО ДВИЖЕНИЯ | 2015 |
|
RU2598362C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| Способ предотвращения столкновения транспортного средства с другим участником движения | 2020 |
|
RU2750467C1 |
Изобретение относится к системам обеспечения безопасности эксплуатации транспортных средств (ТС). В способе предупреждения столкновения транспортного средства с динамическим препятствием, перемещающимся в передней зоне ТС, при помощи сигналов ультразвуковых датчиков, лазерного дальномера и информации системы технического зрения оценивают расстояние до перемещающегося препятствия и его скорость передвижения. По полученным данным и известной скорости движения ТС прогнозируют точку нахождения ТС на траектории движения в момент пересечения динамическим препятствием траектории движения ТС. В случае расположения прогнозируемой точки нахождения ТС на траектории движения препятствия рассчитывают траектории и оптимальный маневр для предотвращения столкновения ТС с препятствием. Блок выработки управляющих сигналов передает сигналы на тормозную систему ТС, систему управления двигателем и рулевое управление. Достигается повышение безопасности эксплуатации ТС. 1 ил.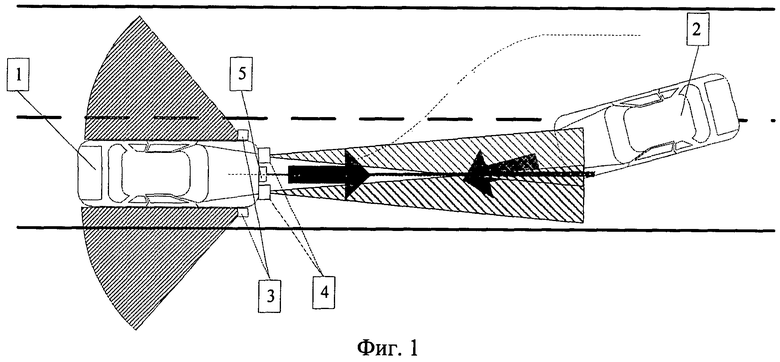
Способ предупреждения столкновения транспортного средства с динамическим препятствием, перемещающимся в передней зоне ТС в направлении, пересекающем траекторию движения ТС, согласно которому при помощи полученных и обработанных сигналов ультразвуковых датчиков, лазерного дальномера и информации системы технического зрения оценивается расстояние до перемещающегося препятствия и его скорость передвижения, по полученным данным и известной скорости движения ТС, а также с учетом сигналов датчиков, контролирующих боковые и заднебоковые зоны ТС, прогнозируют точку нахождения ТС на траектории движения в момент пересечения динамическим препятствием траектории движения ТС и в случае расположения прогнозируемой точки нахождения ТС на траектории движения в прогнозируемой точке пересечения или ее окрестности происходит расчет траектории и выполнение оптимального маневра для предотвращения столкновения ТС с динамическим препятствием и недопущения возникновения новых столкновений ТС с препятствиями, находящимися или движущимися на соседних полосах движения, отличающийся тем, что расчет траектории осуществляется путем передачи информации в блок выработки управляющих сигналов, которые затем передаются на исполнительные механизмы ТС, включающие в себя тормозную систему ТС, систему управления двигателем и систему рулевого управления.
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ОБЪЕКТОМ, ПЕРЕМЕЩАЮЩИМСЯ В ПЕРЕДНЕБОКОВОЙ ЗОНЕ ТРАНСПОРТНОГО СРЕДСТВА В НАПРАВЛЕНИИ, ПЕРЕСЕКАЮЩЕМ ТРАЕКТОРИЮ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2402445C1 |
| УСТРОЙСТВО КОНТРОЛЯ ДИСТАНЦИЙ АВТОМОБИЛЯ ДО ПРЕПЯТСТВИЙ | 2010 |
|
RU2425765C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2450365C2 |

