ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к устройству технической поддержки управления транспортным средством и к способу технической поддержки управления транспортным средством, которые обеспечивают техническую поддержку управления транспортным средством для предотвращения столкновения между транспортным средством и движущимся объектом.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Устройство технической поддержки управления транспортным средством, описанное в Патентном документе 1, известно как обычное устройство технической поддержки управления транспортным средством. Устройство технической поддержки управления транспортным средством, описанное в Патентном документе 1, определяет положение объекта, находящегося на траектории движения транспортного средства, и определяет, является ли скорость горизонтального перемещения объекта, обнаруженного на траектории движения транспортного средства, равной или меньшей заданной скорости. Если обнаружено, что скорость горизонтального перемещения равна или меньше заданной скорости, устройство технической поддержки управления транспортным средством определяет путем вычисления угла на основании данных о траектории движущегося объекта и траектории движения транспортного средства, столкнется ли транспортное средство с движущимся объектом.
СПИСОК ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ДОКУМЕНТАЦИЯ
[0003] Патентный документ 1: Публикация заявки на патент Японии № 2010-257298 (JP 2010-257298).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблема, решаемая изобретением
[0004] В ситуации, когда по ходу движения транспортного средства пешеход собирается пересечь дорогу, пешеход может закончить пересекать дорогу, когда транспортное средство окажется в месте нахождения пешехода, и в этом случае возникает необходимость в технической поддержке управления транспортным средством для предотвращения наезда на пешехода. Даже если скорость горизонтального перемещения равна заданной скорости или ниже ее, традиционное устройство технической поддержки управления транспортным средством способно принять решение о возможности столкновения на основании вычисленного угла по отношению к транспортному средству и осуществить техническую поддержку управления транспортным средством. Таким образом, техническая поддержка управления транспортным средством может быть осуществлена без необходимости, и в этом случае водитель может испытать неудобство в связи с тем, что предпринятые действия не соответствуют реальной ситуации.
[0005] Задачей настоящего изобретения является устранение вышеописанной проблемы, и предметом настоящего изобретения являются устройство технической поддержки управления транспортным средством и способ технической поддержки управления транспортным средством, способные обеспечить принятие верного решения о необходимости технической поддержки управления транспортным средством и осуществлять эффективную техническую поддержку управления транспортным средством.
Средства решения проблемы
[0006] Для решения описанной выше проблемы предлагается устройство технической поддержки управления транспортным средством, являющееся предметом настоящего изобретения, то есть устройство технической поддержки управления транспортным средством, которое помогает управлять транспортным средством для предотвращения столкновения между транспортным средством и движущимся объектом и отличается тем, что устройство поддержки управления транспортным средством вычисляет первый и второй промежутки времени, где первый промежуток времени представляет собой время, за которое транспортное средство, перемещающееся по траектории, пересекающейся с траекторией движения объекта, достигнет точки пересечения, где пересекутся траектории движения транспортного средства и движущегося объекта, а второй промежуток времени представляет собой время, за которое движущийся объект достигнет точки пересечения; при этом техническая поддержка управления транспортным средством будет осуществлена на основании сравнения первого и второго промежутков времени.
[0007] Заявляемое устройство технической поддержки управления транспортным средством прогнозирует первый промежуток времени, за который транспортное средство достигнет точки пересечения по ходу движения, и второй промежуток времени, за который движущийся объект, перемещающийся по траектории, пересекающейся с траекторией движения транспортного средства, достигнет точки пересечения при движении по траектории, которая является поперечной по отношению к траектории движения транспортного средства и выполняет техническую поддержку управлением движения транспортного средства на основе сравнения прогнозированных первого промежутка времени и второго промежутка времени. Таким образом, путем прогнозирования второго промежутка времени, за который движущийся объект достигнет точки пересечения, техническая поддержка управления транспортным средством может быть осуществлена на основе принятия точного решения относительно того, необходима ли техническая поддержка управления транспортным средством. В результате может быть осуществлена эффективная помощь в управлении транспортным средством.
[0008] Устройство технической поддержки управления транспортным средством включает устройство прогнозирования первого промежутка времени для прогнозирования первого промежутка времени, за который транспортное средство достигнет точки пересечения по ходу движения; устройство прогнозирования второго промежутка времени для прогнозирования второго промежутка времени, за который движущийся объект, перемещающийся по траектории, пересекающейся с траекторией движения транспортного средства, достигнет точки пересечения; устройство для принятия решения о необходимости технической поддержки управления транспортным средством для принятия решения, должна ли выполняться техническая поддержка управления транспортным средством, путем наложения первого и второго промежутков времени, прогнозированных устройствами прогнозирования первого и второго промежутка времени, на заданную диаграмму; и устройство управления технической поддержкой управления транспортным средством для выполнения управления технической поддержкой управления транспортным средством, если устройство для принятия решения о необходимости технической поддержки управления транспортным средством принимает решение о том, что техническая поддержка управления транспортным средством должна быть осуществлена. Путем наложения на заданную карту первого промежутка времени и второго промежутка времени решение о необходимости технической поддержки управления транспортным средством, может быть принято с высокой долей точности.
[0009] Кроме того, устройство технической поддержки управления транспортным средством включает устройство определения положения транспортного средства для определения положения транспортного средства и устройство определения положения движущегося объекта для определения положения движущегося объекта; при этом устройства прогнозирования первого и второго промежутков времени прогнозируют первый промежуток времени и второй промежуток времени, соответственно, на основе положения транспортного средства, определенного устройством определения положения транспортного средства, и положения движущегося объекта, определенного устройством определения положения движущегося объекта. Эта конфигурация делает возможным более точное прогнозирование первого и второго промежутков времени.
[0010] Первая область, в отношении которой определено, что техническая поддержка управления транспортным средством не нужна, и вторая область, в отношении которой определено, что техническая поддержка управления транспортным средством необходима, накладываются на карту, и устройство для принятия решения о необходимости технической поддержки управления транспортным средством решает, что техническая поддержка управления транспортным средством должна быть осуществлена, если точка, представляющая соотношение между первым промежутком времени и вторым промежутком времени, находится во второй области. Использование карты гарантирует большую точность при принятии решения относительно того, необходима ли техническая поддержка управления транспортным средством.
[0011] Во второй области задается множество информационных материалов для технической поддержки управления транспортным средством в зависимости от того, насколько опасной представляется ситуация, и устройство, контролирующее техническую поддержку управления транспортным средством, определяет информационный материал для управления технической поддержкой управления транспортным средством, которым будет задействован в соответствии с информационным материалом для технической поддержки управления транспортным средством, заданных во второй области карты. Эта конфигурация обеспечивает выполнение технической поддержки управления транспортным средством тогда, когда она действительна необходима, путем сопоставления положений транспортного средства и движущегося объекта.
[0012] Способ технической поддержки управления транспортным средством, являющийся предметом настоящего изобретения, представляет собой способ технической поддержки управления транспортным средством для предотвращения столкновения между транспортным средством и движущимся объектом. Способ характеризуется тем, что производится вычисление первого промежутка времени и второго промежутка времени, при этом первый промежуток времени представляет собой время, за которое транспортное средство достигнет точки пересечения, где транспортное средство и движущийся объект пересекутся, двигаясь по траектории движения транспортного средства и по траектории, пересекающей траекторию движения транспортного средства, а второй промежуток времени представляет собой время, за которое движущийся объект достигнет точки пересечения, при этом техническая поддержка управления транспортным средством осуществляется на основе сравнения первого промежутка времени и второго промежутка времени.
[0013] Данный способ технической поддержки управления транспортным средством прогнозирует первый промежуток времени, за который транспортное средство достигнет точки пересечения, двигаясь по заданной траектории, и второй промежуток времени, за который движущийся объект, перемещающийся по траектории, пересекающейся с траекторией движения транспортного средства, достигнет точки пересечения, т.е. по траектории, пересекающейся с траекторией движения транспортного средства, после чего будет осуществляться техническая поддержка управления транспортным средством на основе сравнения спрогнозированных первого и второго промежутков времени. Таким образом, путем прогнозирования второго промежутка времени, за который движущийся объект достигнет точки пересечения, техническая поддержка управления транспортным средством может быть осуществлена на основе точного решения о необходимости технической поддержки управления транспортным средством. В результате, может быть осуществлена техническая поддержка управления транспортным средством.
[0014] Способ технической поддержки управления транспортным средством включает этап прогнозирования первого промежутка времени для прогнозирования первого промежутка времени, за который транспортное средство достигнет точки пересечения, двигаясь по заданной траектории; этап прогнозирования второго промежутка времени для прогнозирования второго промежутка времени, за который движущийся объект, перемещающийся по траектории, пересекающейся с траекторией движения транспортного средства, достигнет точки пересечения; этап принятия решения о необходимости технической поддержки управления транспортным средством для принятия решения о необходимости осуществления технической поддержки управления транспортным средством, путем наложения первого и второго промежутков времени, прогнозированных на этапах прогнозирования первого и второго промежутков времени, на диаграмму с установленными параметрами; и этап управления технической поддержкой управления транспортным средством для осуществления управления технической поддержкой управления транспортным средством, если на этапе принятия решения о необходимости технической поддержки управления транспортным средством было принято решение о том, что техническая поддержка управления транспортным средством должна быть осуществлена.
[0015] Кроме того, способ технической поддержки управления транспортным средством включает этап определения состояния транспортного средства для определения состояния транспортного средства, этап определения положения движущегося объекта для определения состояния движущегося объекта; при этом на этапах прогнозирования первого и второго промежутков времени прогнозируются первый промежуток времени и второй промежуток времени, соответственно, на основе состояния транспортного средства, определенного на этапе определения состояния транспортного средства, и состояния движущегося объекта, определенного на этапе определения состояния движущегося объекта.
Преимущества изобретения
[0016] Настоящее изобретение позволяет принять точное и верное решение относительно того, необходима ли техническая поддержка управления транспортным средством, и техническая поддержка управления транспортным средством выполняется тогда, когда она действительно необходима.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
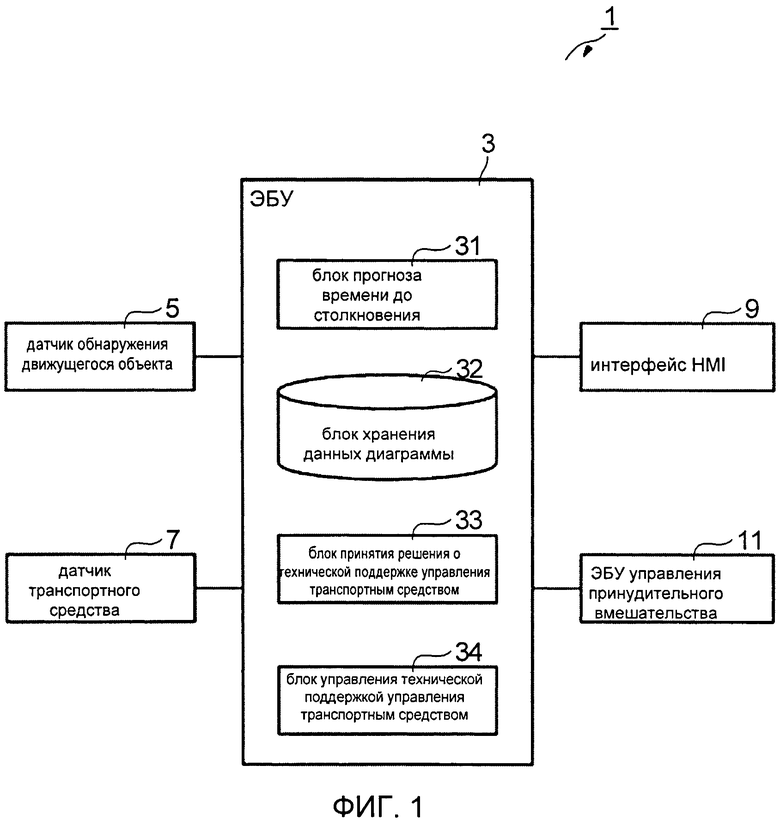
[0017] ФИГ.1 представляет собой схему, на которой изображено устройство технической поддержки управления транспортным средством в предпочтительном варианте осуществления изобретения.
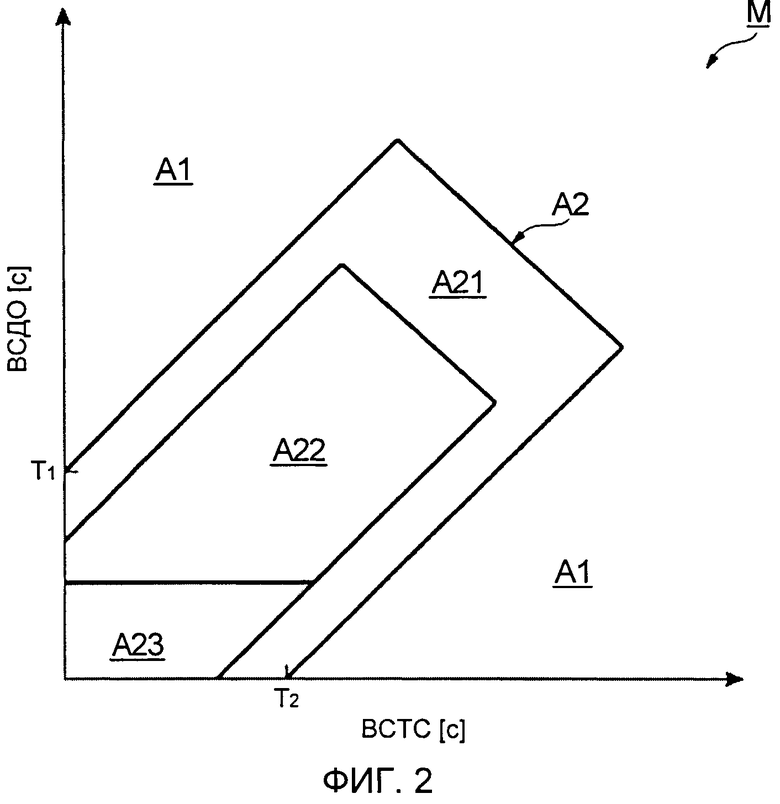
ФИГ.2 представляет собой схему, на которой изображена диаграмма.
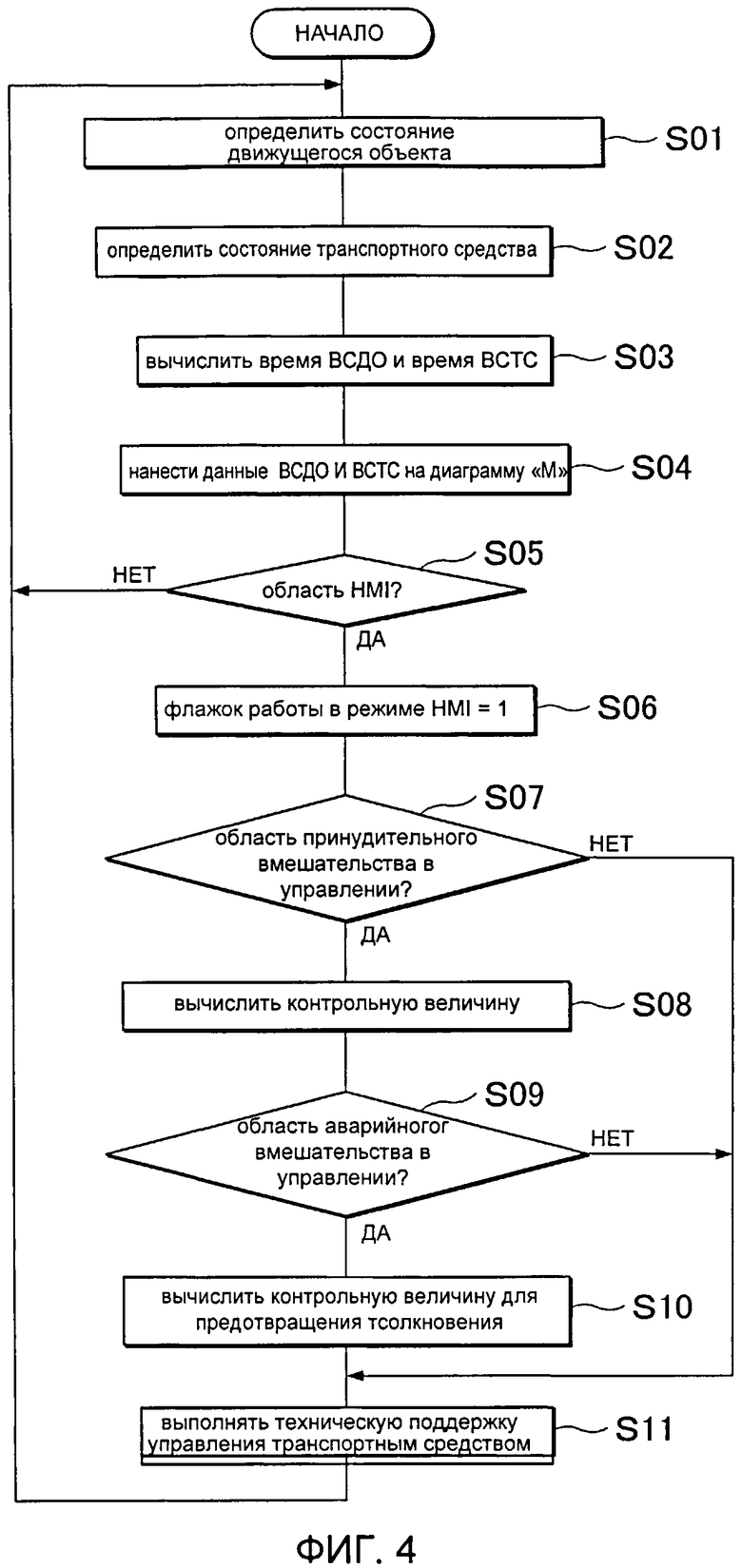
ФИГ.3 представляет собой диаграмму способа принятия решения блоком принятия решения о технической поддержке управления транспортным средством, используемый для принятия решения о необходимости технической поддержки управления транспортным средством.
ФИГ.4 представляет собой функциональную схему, на которой изображена работа устройства технической поддержки управления транспортным средством.
СПОСОБЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0018] Предпочтительный вариант осуществления настоящего изобретения подробно описан далее со ссылкой на прилагаемые чертежи. В пояснениях к чертежам одинаковые или аналогичные элементы обозначены одинаковыми позициями, и их описание не повторяется.
[0019] ФИГ.1 представляет собой схему, на которой изображена конфигурация устройства технической поддержки управления транспортным средством в приводимом в качестве примера варианте осуществления изобретения. Устройство 1 технической поддержки управления транспортным средством, изображенное на ФИГ.1, представляет собой устройство, установленное на транспортном средстве, таком, как автомобиль, и предназначенное для выполнения технической поддержки управления автомобилем с целью предотвращения столкновения с движущимся объектом, таким, как пешеход или велосипед. Техническая поддержка управления автомобилем подразумевает такие действия, как выполнение прямого принудительного вмешательства в управление автомобилем, например применение торможения или выполнение поворота, а также подача предупредительного сигнала водителю.
[0020] Как показано на ФИГ.1, устройство технической поддержки управления транспортным средством 1 включает блок ЭБУ (электронный блок управления) 3. датчик 5 детектирования движущегося объекта (устройство определения состояния движущегося объекта), датчик 7 транспортного средства (устройство определения состояния транспортного средства), интерфейс HMI (человеко-машинный интерфейс) 9 и блок ЭБУ 11 принудительного вмешательства соединены с блоком ЭБУ 3. Блок ЭБУ 3 и блок ЭБУ 11 принудительного вмешательства, оба представляют собой электронные блоки управления, состоящие из ЦПУ [центрального процессорного устройства], ПЗУ [постоянного запоминающего устройства] и ОЗУ [оперативного запоминающего устройства], управляются программой.
[0021] Датчик 5 детектирования движущегося объекта представляет собой внешний датчик, который служит для обнаружения движущегося объекта. Датчик 5 детектирования движущегося объекта представляет собой устройство для формирования изображения, например лазерный радар, радар миллиметрового диапазона или камеру. Если датчик 5 детектирования движущегося объекта представляет собой радар миллиметрового диапазона, он определяет наличие движущегося объекта по ходу движения транспортного средства путем отправления и приема частотно-модулированной радарной волны в миллиметровом диапазоне и на основе полученных результатов генерирует информацию о таких характеристиках движущегося объекта, как его положение и скорость. Датчик 5 детектирования движущегося объекта передает информацию о движущемся объекте в блок ЭБУ 3. Если датчик 5 детектирования движущегося объекта представляет собой камеру, он производит обработку полученного изображения и формирует информацию о движущемся объекте. Датчик 5 детектирования движущегося объекта может представлять собой комбинацию радара миллиметрового диапазона и камеры.
[0022] Датчик 7 транспортного средства представляет собой внутренний датчик, который определяет режим перемещения транспортного средства. Датчик 7 транспортного средства может быть, например, датчиком угловой скорости рыскания, определяющим угловую скорость рыскания транспортного средства, датчиком угла поворота, определяющим угол поворота транспортного средства, или датчиком скорости транспортного средства, определяющим скорость транспортного средства (скорость движения автомобиля). Датчик 7 транспортного средства передает на блок ЭБУ 3 информацию о транспортном средстве, которая отражает определенные параметры перемещения транспортного средства.
[0023] Блок ЭБУ 3 включает блок 31 прогнозирования времени столкновения (устройство прогнозирования первого промежутка времени, устройство прогнозирования второго промежутка времени), блок 33 хранения данных диаграммы, блок 35 принятия решения о технической поддержке управления транспортным средством (устройство для принятия решения о необходимости технической поддержки управления транспортным средством) и блок 37 управления технической поддержкой управления транспортным средством (устройство, управляющее технической поддержкой управления транспортным средством).
[0024] Блок 31 прогнозирования времени столкновения является элементом устройства, который прогнозирует промежуток времени до того момента, когда транспортное средство и движущийся объект окажутся в точке пересечения. После получения информации о движущемся объекте от датчика 5 детектирования движущегося объекта и информации о транспортном средстве от датчика 7 транспортного средства, блок 31 прогнозирования времени столкновения вычисляет время столкновения транспортного средства с движущимся объектом, то есть промежуток времени до того момента, когда транспортное средство и движущийся объект окажутся в точке пересечения, где пересекутся траектории движения транспортного средства, управляемого водителем, и движущегося объекта; на основе информации о движущемся объекте и информации о транспортном средстве.
[0025] Блок 31 прогнозирования времени столкновения определяет прогнозируемую траекторию движения транспортного средства на основе информации о транспортном средстве и вычисляет промежуток времени до того момента, когда транспортное средство прибудет в точку пересечения, то есть время ВСДО (время до столкновения с движущимся объектом, первый промежуток времени), который представляет собой значение, указывающее на то, через сколько секунд транспортное средство достигнет точки пересечения с движущимся объектом, если транспортное средство будет продолжать двигаться в том же направлении и в таком же режиме. Кроме того, блок 31 прогнозирования времени до столкновения определяет вектор скорости движущегося объекта на основании информации о движущемся объекте и вычисляет промежуток времени до того момента, когда движущийся объект окажется в точке пересечения, то есть время ВСТС (время до столкновения с транспортным средством, второй промежуток времени), который представляет собой значение, указывающее на то, через сколько секунд движущийся объект пересечется с транспортным средством, если движущийся объект будет продолжать двигаться по той же траектории (пересекающейся с траекторией движения транспортного средства), двигаясь по которой в текущем режиме движущийся объект столкнется с транспортным средством.
[0026] Блок 31 прогнозирования времени столкновения вычисляет ВСДО и ВСТС с помощью уравнения (1) и уравнения (2), которые приведены ниже.


В уравнениях (1) и (2), которые приведены выше, V обозначает скорость автомобиля, x и y обозначают относительное положение движущегося объекта, a vx и vy обозначают скорость движущегося объекта. Блок 31 прогнозирования времени столкновения передает данные ВСДО и данные ВСТС, которые представляют собой вычисленные ВСДО и ВСТС, соответственно, в блок принятия решения о технической поддержке управления транспортным средством 35.
[0027] Блок 33 хранения данных диаграммы хранит диаграмму «М». ФИГ. 2 представляет собой схему, на которой изображена диаграмма. Как показано на ФИГ. 2, путем отчета ВСДО [с] на вертикальной оси и ВСТС [с] на горизонтальной оси диаграмма «М» показывает соотношение ВСДО и ВСТС. На диаграмме «М» исходная точка - это точка пересечения между транспортным средством и движущимся объектом. На диаграмме «М» по мере удаления точки от исходной точки (то есть по мере увеличения времени ВСДО и ВСТС), точка обозначает удаление от точки пересечения. На диаграмме «М» показаны две различные области: область А1, где техническая поддержка управления транспортным средством не нужна (первая область), и область А2 технической поддержки управления транспортным средством (вторая область). Более подробное описание диаграммы «М» приводится далее.
[0028] Область А2 технической поддержки управления транспортным средством представляет собой область, ограниченную функцией y=fx(ВСДО, ВСТС). Две прямые линии, ограничивающие область А2 технической поддержки управления транспортным средством, определены разностью (ВСДО - ВСТС) между ВСДО и ВСТС. На диаграмме «М» значения T1 и Т2 устанавливаются, например, в диапазоне от 1 до 3 секунд.
[0029] В области А2 технической поддержки управления транспортным средством заранее выделены несколько областей в зависимости от того, насколько опасной представляется ситуация, на основе данных для управления технической поддержкой управления транспортным средством: область А21 использования интерфейса HMI, область принудительного вмешательства А22 и область аварийного принудительного вмешательства А23. Область А21 интерфейса HMI представляет собой область, в которой выполняется такая техническая поддержка управления транспортным средством, как подача предупредительного сигнала водителю. Область принудительного вмешательства А22 выделена внутри области А21 интерфейса HMI. Область принудительного вмешательства А22 представляет собой область, в которой выполняется такая техническая поддержка управления транспортным средством, как торможение. Область аварийного принудительного вмешательства А23 представляет собой область, в которой применяется экстренное торможение в качестве средства аварийного принудительного вмешательства в управление для предотвращения столкновения. Область аварийного принудительного вмешательства А23 близка к исходной точке диаграммы М, то есть к части, расположенной рядом с точкой пересечения между траекториями движения транспортного средства и движущегося объекта.
[0030] Область А1, где техническая поддержка управления транспортным средством не нужна, является иной областью, чем область А2 технической поддержки управления транспортным средством, и представляет собой область, где не требуется техническая поддержка управления транспортным средством для предотвращения столкновения между транспортным средством и движущимся объектом. То есть, когда область соответствует области А1, где техническая поддержка управления транспортным средством не нужна, это означает, что движущийся объект уже минует точку пересечения к тому моменту, когда транспортное средство окажется в точке пересечения, или что движущийся объект находится далеко от точки пересечения.
[0031] Диаграмма «М» может представлять собой диаграмму, на которой область А2 технической поддержки управления транспортным средством и область А1, где техническая поддержка управления транспортным средством не нужна, определены на основе экспериментальных данных, или на которой область А2 технической поддержки управления транспортным средством и область А1, где техническая поддержка управления транспортным средством не нужна, определены на основе информации о режиме управления транспортным средством (параметров акселератора, параметров тормоза). На диаграмме «М» контрольное значение технической поддержки управления транспортным средством может быть определено для области принудительного вмешательства А22 и для области аварийного принудительного вмешательства А23. Диаграмма «М», записанная (хранящаяся) в блоке 33 хранения данных диаграммы, может перезаписываться (может выполняться обновление диаграммы М).
[0032] Блок 35 принятия решения о технической поддержке управления транспортным средством представляет собой элемент, где принимается решение, будет ли осуществляться техническая поддержка управления транспортным средством. Блок 35 принятия решения о технической поддержке управления транспортным средством накладывает время ВСДО и ВСТС на диаграмму «М», чтобы определить необходимость осуществления технической поддержки управления транспортным средством. В частности, блок 35 принятия решения о технической поддержке управления транспортным средством накладывает данные ВСДО и данные ВСТС, полученные от блока 31 прогнозирования времени до столкновения, на диаграмму «М», чтобы определить, в какой именно области на диаграмме «М» находится точка пересечения между ВСДО и ВСТС (точка, которая обозначает соотношение ВСДО и ВСТС). Например, если ВСДО и ВСТС пересекаются в точке Р1, показанной на ФИГ. 3, блок 35 принятия решения о технической поддержке управления транспортным средством принимает решение не осуществлять техническую поддержку управления транспортным средством, поскольку точка Р1 относится к области А1, где техническая поддержка управления транспортным средством не нужна. Иными словами, если ВСДО и ВСТС пересекаются в точке Р1, транспортное средство уже минует точку пересечения к тому моменту, когда движущийся объект окажется в точке пересечения.
[0033] С другой стороны, когда ВСДО и ВСТС пересекаются в точке Р2, блок 35 принятия решения о технической поддержке управления транспортным средством принимает решение осуществить техническую поддержку управления транспортным средством, поскольку точка Р2 относится к области А2 технической поддержки управления транспортным средством (область принудительного вмешательства А22). Если принято решение осуществить техническую поддержку управления транспортным средством, блок 35 принятия решения о технической поддержке управления транспортным средством выводит данные о выполнении технической поддержки, которые включают информацию по крайней мере об одной из областей (области А21 интерфейса HMI, области принудительного вмешательства А22 и области аварийного принудительного вмешательства А23) в блок 37 управления технической поддержки управления транспортным средством.
[0034] Возвращаясь к ФИГ. 1, отметим, что блок 37 управления технической поддержкой управления транспортным средством является элементом, который управляет технической поддержкой управления транспортным средством. После получения данных о выполнении технической поддержки от блока 35 принятия решения о технической поддержке управления транспортным средством блок 37 управления технической поддержкой управления транспортным средством осуществляет управление технической поддержкой управления транспортным средством (управление принудительным вмешательством) на основе данных о выполнении технической поддержки. Управление принудительным вмешательством является, например, управлением тормозной системой или рулевым управлением. Если информация об области А21 интерфейса HMI входит в состав данных о выполнении технической поддержки, блок 37 управления технической поддержкой управления транспортным средством выдает предупредительный управляющий сигнал на интерфейс HMI 9.
[0035] Если информация об области принудительного вмешательства А22 и области аварийного принудительного вмешательства А23 входит в состав данных о выполнении технической поддержки, блок 37 управления технической поддержкой управления транспортным средством вычисляет контрольное значение управления принудительным вмешательством. Если контрольное значение относится к области принудительного вмешательства А22 и к области аварийного принудительного вмешательства А23 на диаграмме «М», блок 37 управления технической поддержкой управления транспортным средством вычисляет контрольное значение торможения (целевое ускорение (ускорение торможения), скорость) на основе диаграммы «М». Если контрольное значение отсутствует на диаграмме «М», блок 37 управления технической поддержкой управления транспортным средством вычисляет контрольное значение на основе приведенного ниже выражения (3).

где α и β - коэффициенты, а γ - константа. Значения α, β и γ определяются на основе экспериментальных данных. Контрольное значение поворота рулевого управления вычисляется на основе экспериментальных данных и заданного выражения. Блок 37 управления технической поддержкой управления транспортным средством передает сигнал управления принудительным вмешательством, который включает контрольное значение, на блок 11 ЭБУ принудительного вмешательства.
[0036] Интерфейс HMI 9 представляет собой, например, устройство звуковой аварийной сигнализации, индикатор на лобовом стекле (ИЛС), монитор навигационной системы или приборную панель. Когда от блока ЭБУ 3 получен предупредительный управляющий сигнал, интерфейс HMI 9 выдает голосовое предупреждение, а монитор отображает визуальное предупреждение, чтобы поставить водителя в известность о том, что впереди по ходу движения транспортного средства находится движущийся объект. Например, когда интерфейс HMI 9 представляет собой индикатор на лобовом стекле, то на лобовом стекле отображается движущийся объект.
[0037] Блок 11 ЭБУ принудительного вмешательства представляет собой блок ЭБУ, который выполняет управление принудительным вмешательством в управление транспортным средством. Когда от блока ЭБУ 3 получен сигнал управления принудительным вмешательством, блок ЭБУ 11 принудительного вмешательства, состоящий из блока ЭБУ тормозной системы и блока ЭБУ двигателя (оба не показаны на чертежах) управляют тормозным приводом и рулевым приводом (оба не показаны на чертежах) в зависимости от контрольного значения, которое передается в составе сигнала управления принудительным вмешательством, для выполнения автоматического управления принудительным вмешательством.
[0038] Далее описана работа устройства 1 технической поддержки управления транспортным средством. На ФИГ.4 представлена функциональная схема, отображающая работу устройства технической поддержки управления транспортным средством.
[0039] Как показано на ФИГ.4, датчик 5 детектирования движущегося объекта определяет состояние движущегося объекта (шаг S01) или же датчик 7 транспортного средства определяет режим движения транспортного средства (шаг S02). Затем блок 31 прогнозирования времени столкновения вычисляет ВСДО и ВСТС на основе информации о движущемся объекте и информации о транспортном средстве, определенных датчиком 5 детектирования движущегося объекта и датчиком 7 транспортного средства, соответственно (шаг S03).
[0040] На следующем этапе блок 35 принятия решения о технической поддержке управления транспортным средством накладывает значения ВСДО и ВСТС, вычисленные блоком 31 прогнозирования времени столкновения, на диаграмму «М», хранящуюся в блоке хранения данных диаграммы (шаг S04), и принимает решение, нужно ли осуществлять техническую поддержку управления транспортным средством.
[0041] Блок 35 принятия решения о технической поддержке управления транспортным средством принимает решение о том, относится ли пересечение ВСДО и ВСТС к области А21 интерфейса HMI, то есть относится ли пересечение к области А2 технической поддержки управления транспортным средством (шаг S05). Если принято решение о том, что пересечение относится к области А21 интерфейса HMI, флажок в режиме работы интерфейса HMI устанавливается на значение «1» (шаг S06). С другой стороны, если не было принято решение о том, что пересечение относится к области А21 интерфейса HMI, то есть пересечение относится к области А1, где техническая поддержка управления транспортным средством не нужна, процесс возвращается на шаг S01.
[0042] Затем блок 37 управления технической поддержкой управления транспортным средством принимает решение о том, относится ли пересечение к области принудительного вмешательства А22 (шаг S07). Если принято решение, что пересечение относится к области принудительного вмешательства А22, блок 37 управления технической поддержкой управления транспортным средством вычисляет контрольное значение управления принудительным вмешательством, например, на основе диаграммы «М» (шаг S08). С другой стороны, если не было принято решение о том, что пересечение относится к области принудительного вмешательства А22, процесс переходит на шаг S 11.
[0043] Затем блок 37 управления технической поддержкой управления транспортным средством принимает решение о том, относится ли пересечение к области аварийного принудительного вмешательства А23 (шаг S09). Если принято решение, что пересечение принадлежит к области аварийного принудительного вмешательства А23, блок 37 управления технической поддержкой управления транспортным средством вычисляет контрольное значение для предотвращения аварийной ситуации (шаг S10). С другой стороны, если не было принято решение о том, что пересечение относится к области аварийного принудительного вмешательства А23, процесс переходит на шаг S11.
[0044] На шаге S11, осуществляется техническая поддержка управления транспортным средством. В частности, интерфейс HMI 9 предупреждает водителя об опасности, и одновременно с этим, блок ЭБУ 11 принудительного вмешательства выполняет управление принудительным вмешательством в управление транспортным средством.
[0045] Как указано выше, в данном варианте осуществления изобретения блок 31 прогнозирования времени столкновения прогнозирует время ВСДО и время ВСТС путем их вычисления, а блок 35 принятия решения о технической поддержке управления транспортным средством накладывает вычисленные ВСДО и ВСТС на диаграмму «М», чтобы определить необходимость осуществления технической поддержки управления транспортным средством. Таким образом, правильное решение о необходимости осуществления технической поддержки управления транспортным средством, может быть принято путем прогнозирования времени ВСТС, которое представляет собой промежуток времени, за который движущийся объект достигнет точки пересечения, то есть промежуток времени, оставшийся до столкновения при движении по траектории, по которой движущийся объект приближается к транспортному средству. Как следствие, данный вариант осуществления изобретения позволяет избежать ситуации, в которой техническая поддержка управления транспортным средством выполняется даже после того, как движущийся объект уже пересек проезжую часть, и техническая поддержка управления транспортным средством выполняется только тогда, когда она действительно нужна, и водитель не испытывает неудобства.
[0046] На диаграмме «М» отображены область А1, где техническая поддержка управления транспортным средством не нужна, и область А2 технической поддержки управления транспортным средством, а в области технической поддержки управления транспортным средством А2 выделены область А21 интерфейса HMI, область принудительного вмешательства А22 и область аварийного принудительного вмешательства А23. Использование диаграммы «М» позволяет принять верное решение о необходимости технической поддержки управления транспортным средством и в то же самое время осуществлять техническую поддержку управления транспортным средством с учетом конкретной ситуации.
[0047] Настоящее изобретение не ограничено представленным вариантом осуществления изобретения, описанным выше. Например, хотя в описанном выше варианте осуществления изобретения интерфейс HMI 9 способен, в дополнение к остальному, выдавать предупредительное сообщение, когда блок 11 ЭБУ принудительного вмешательства выполняет управление принудительным вмешательством в управление транспортным средством, интерфейс HMI 9 может и не выдавать предупредительного сигнала, когда выполняется управление принудительным вмешательством в управление автомобилем.
[0048] В дополнение к описанному выше варианту осуществления изобретения, возможна и другая конфигурация, в которой предусмотрено устройство для сбора данных об окружающей обстановке (окружающей среде) транспортного средства, чтобы задействовать техническую поддержку управления транспортным средством с учетом окружающей обстановки (например, присутствия транспортного средства на полосе встречного движения).
[0049] 1 - устройство технической поддержки управления автомобилем, 3 - блок ЭБУ, 5 - датчик детектирования движущегося объекта, 7 - датчик транспортного средства, 31 - блок прогнозирования времени столкновения (блок прогнозирования первого промежутка времени, блок прогнозирования второго промежутка времени), 33 - блок хранения данных диаграммы, 35 - блок принятия решения о поддержке управления транспортного средства (устройство для принятия решения о необходимости поддержки управления транспортного средства), 37 - блок управления технической поддержкой управления транспортным средством (устройство, управляющее технической поддержкой управления транспортным средством), М - диаграмма.
Группа изобретений относится к области автомобилестроения, а именно к устройствам технической поддержки управления транспортным средством. Устройство технической поддержки управления транспортным средством вычисляет промежуток времени, за который транспортное средство достигнет точки пересечения, в которой транспортное средство и движущийся объект пересекаются при движении по траектории транспортного средства и по траектории, пересекающей траекторию движения транспортного средства, и время, за которое движущийся объект достигнет точки пересечения, и выполняет техническую поддержку управления транспортным средством на основе сравнения первого промежутка времени и второго промежутка времени. Способ технической поддержки управления транспортным средством заключается в обеспечении принятия правильного решения относительно необходимости технической поддержки управления транспортным средством и выполнении технической поддержки управления транспортным средством тогда, когда она необходима. Достигается обеспечение принятия верного решения о необходимости технической поддержки управления транспортным средством и осуществление эффективной технической поддержки управления транспортным средством. 2 н. и 4 з.п. ф-лы, 4 ил.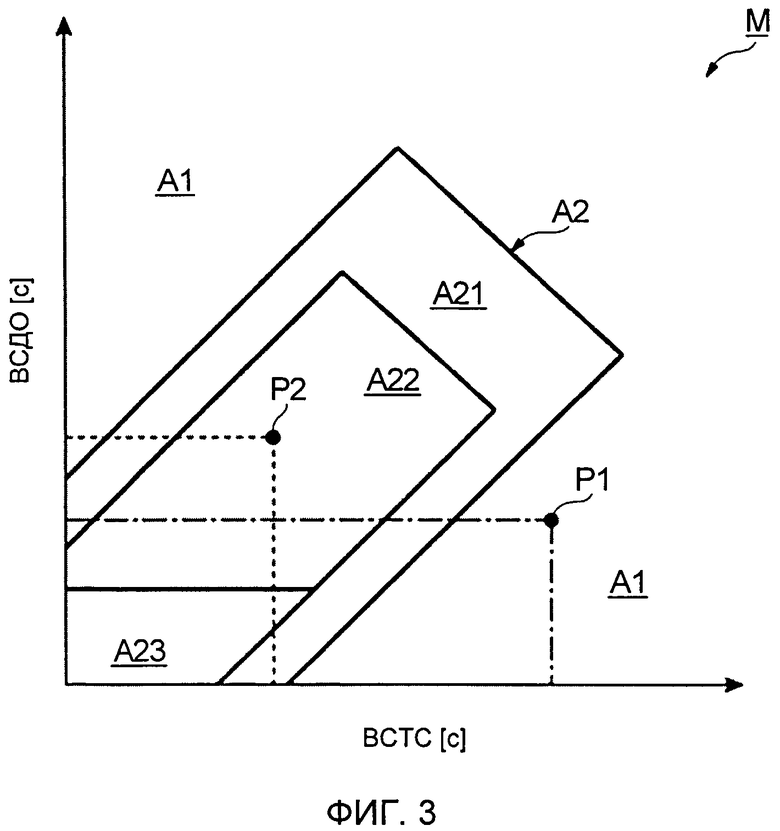
1. Устройство технической поддержки управления транспортным средством, которое выполняет техническую поддержку управления транспортным средством для предотвращения столкновения между транспортным средством и движущимся объектом, содержащее:
устройство прогнозирования первого промежутка времени для прогнозирования первого промежутка времени, требуемого для транспортного средства, чтобы достигнуть точки пересечения по направлению движения, при этом точка пересечения является точкой, в которой транспортное средство и движущийся объект пересекаются по направлению движения транспортного средства и по направлению, пересекающему траекторию движения транспортного средства;
устройство прогнозирования второго промежутка времени для прогнозирования второго промежутка времени, требуемого для движущегося объекта, чтобы достигнуть точки пересечения в направлении, пересекающемся с направлением движения транспортного средства;
устройство для принятия решения о технической поддержке управления транспортным средством для принятия решения, будет ли выполняться техническая поддержка управления транспортным средством, путем наложения на заданную диаграмму первого и второго промежутков времени, прогнозированных устройствами прогнозирования первого и второго промежутков времени; и
устройство управления технической поддержкой управления транспортным средством для осуществления управления технической поддержкой управления транспортным средством, если устройство для принятия решения о технической поддержке управления транспортным средством принимает решение о том, что техническая поддержка управления транспортным средством должна быть осуществлена.
2. Устройство технической поддержки управления транспортным средством по п.1, отличающееся тем, что дополнительно включает:
средства определения состояния транспортного средства для определения состояния транспортного средства; и
средства определения состояния движущегося объекта для определения состояния движущегося объекта, при этом
средства прогнозирования первого и второго промежутков времени, чтобы прогнозировать первый промежуток времени и второй промежуток времени, соответственно, на основе состояния транспортного средства, определенного средствами определения состояния транспортного средства, и состояния движущегося объекта, определенного средствами определения состояния движущегося объекта.
3. Устройство технической поддержки управления транспортным средством по п.1 или 2, в котором:
первая область, в отношении которой принимают решение о том, что техническая поддержка управления транспортным средством не нужна, и вторая область, в отношении которой принимают решение о том, что техническая поддержка управления транспортным средством необходима, задаются на диаграмме, и
средства для принятия решения о необходимости технической поддержки управления транспортным средством принимают решение о том, что техническая поддержка управления транспортным средством должна быть осуществлена, если точка, представляющая соотношение между первым промежутком времени и вторым промежутком времени, находится во второй области.
4. Устройство технической поддержки управления транспортным средством по п.3, в котором:
множество данных о технической поддержки управления транспортным средством задают для второй области в зависимости от необходимости, и
средства управления технической поддержкой управления транспортным средством определяют данные для управления технической поддержкой управления транспортным средством, которое будет осуществляться согласно данным о технической поддержке управления транспортным средством, содержащимся для второй области диаграммы.
5. Способ технической поддержки управления транспортным средством для предотвращения столкновения между транспортным средством и движущимся объектом, включающий:
прогнозирование первого промежутка времени для прогнозирования первого промежутка времени, требуемого для транспортного средства, чтобы достигнуть точки пересечения по направлению движения, при этом точка пересечения является точкой, в которой транспортное средство и движущийся объект пересекаются по направлению движения транспортного средства и по направлению, пересекающему траекторию движения транспортного средства;
прогнозирование второго промежутка времени для прогнозирования второго промежутка времени, за который движущийся объект, перемещающийся по направлению, пересекающему траекторию движения транспортного средства, достигнет точки пересечения;
принятие решения о технической поддержке управления транспортным средством для принятия решения, должна ли выполняться техническая поддержка управления транспортным средством, путем наложения первого и второго промежутка времени, спрогнозированных на этапах прогнозирования первого и второго промежутков времени, на заданную диаграмму; и
управление технической поддержкой управления транспортным средством для управления технической поддержкой управления транспортным средством, если на этапе принятия решения о технической поддержке управления транспортным средством принимается решение о том, что техническая поддержка управления транспортным средством должна быть осуществлена.
6. Способ технической поддержки управления транспортным средством по п.5, который дополнительно включает:
определение состояния транспортного средства для определения состояния транспортного средства; и
определение состояния движущегося объекта для определения состояния движущегося объекта, при этом
на этапе прогнозирования первого и второго промежутков времени прогнозируются первый промежуток времени и второй промежуток времени, соответственно, на основе состояния транспортного средства, определенного на этапе определения состояния транспортного средства, и состояния движущегося объекта, определенного на этапе определения состояния движущегося объекта.
| JP 2005352610 A, 22.12.2005 | |||
| JP 2006146948 A, 08.06.2006 | |||
| JP 2010108343 A, 13.05.2010 | |||
| JP 2004246458 A, 02.09.2004 | |||
| JP 2005352608 A, 22.12.2005 | |||
| JP 2009223640 A, 01.10.2009 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |

