Изобретение относится к способам прицеливания оружия и контроля поражения цели при стрельбе, ведущимся по видеоизображениям, получаемым от видеокамер, установленных на самом оружии.
Известен способ прицеливания и контроля поражения цели при стрельбе устройства Corner Shot CSM, предназначенного для стрельбы из укрытия, разработки фирмы Corner Shot Holdings LLC [www.cornershot.com]. Устройство построено в виде фронтальной и тыльной частей, соединенных шарниром, позволяющим поворачивать части вправо и влево относительно друг друга на угол 63 градуса. Фронтальную часть оснащают легким стрелковым оружием, быстросъемной цветной видеокамерой, лазерным дальномером и тактическим фонарем с рассеивающим светофильтром. Тыльная часть выполнена в виде приклада с встроенным в него блоком питания и поворотным монитором, транслирующим полученное с видеокамеры изображение и прицельную марку. Стрельба ведется при выставленной из укрытия фронтальной части, при этом тыльная часть устройства и сам стрелок остаются вне зоны поражения. Прицеливание оружия происходит в ходе угловых подвижек устройства, отслеживаемых по относительным перемещениям прицельной марки и изображения цели, демонстрируемых на поворотном мониторе. Данный способ имеет ряд недостатков:
- малая прицельная дальность ведения стрельбы, так как применяемая обзорная видеокамера не оснащена телеобъективом, позволяющим получать увеличенное изображение удаленной цели;
- трудность или невозможность ведения огня из узких бойниц.
Известен способ прицеливания и контроля поражения цели при стрельбе оружия ХМ29 OICW (Objective Individual Combat Weapon) [vvww.world.guns.ru/assault/as40-e.htm]. Оружие, выполненное по схеме «буллпап», оснащают оптическим, телевизионным и тепловизионным прицелами, лазерным дальномером-целеуказателем, системой автоматического сопровождения движущихся целей. Недостаток данного способа заключается в том, что для точного прицеливания применяют оптический прицел, что снижает оперативность наведения оружия на цель, так как требует от стрелка перемещения взгляда от монитора с демонстрируемым на нем изображением с телевизионной камеры к окуляру оптического прицела. Кроме того, точное прицеливание оружия через узкие бойницы при помощи оптического прицела, крепящегося на прицельной планке, трудновыполнимо или невозможно.
В качестве прототипа выбран способ прицеливания и контроля поражения цели при стрельбе оружия «Famas-G2» [www.legionetrangere.ru]. Способ заключается в поиске целей и наведении на них оружия, ведущимися по видеоизображениям, получаемым от обзорной видеокамеры, закрепленной на оружии.
Недостаток данного способа заключается в том, что он не позволяет проводить точное прицеливание и контроль поражения цели по увеличенному видеоизображению удаленной цели.
Задачей настоящего изобретения является создание способа прицеливания оружия, позволяющего оперативно обнаруживать цели, точно наводиться на них (вне зависимости от их удаленности) и производить контроль поражения.
Поставленная задача достигается тем, что в способе прицеливания и контроля поражения цели при стрельбе, включающем поиск цели, наведение на нее оружия и совмещение прицельной марки с видеоизображением цели на мониторе, получаемым от обзорной видеокамеры, закрепленной на оружии с обеспечением параллельности главной оптической оси ее объектива направлению стрельбы оружия, согласно изобретению поиск цели и наведение оружия проводят предварительно в широком телесном угле по видеоизображению, после чего осуществляют точное наведение оружия и контроль поражения цели по увеличенному видеоизображению цели посредством совмещения прицельной марки и видеоизображения цели на мониторе, получаемого от первой дополнительной видеокамеры, закрепленной на оружии, с обеспечением параллельности и однонаправленности главных оптических осей объективов обеих видеокамер.
Техническая сущность изобретения заключается в повышении оперативности поиска целей за счет одномоментного обзора достаточно обширного пространства по видеоизображению, получаемому от обзорной видеокамеры (с широкоугольным объективом), при этом одновременно обеспечивается достаточная точность наведения оружия и контроля степени поражения цели за счет наблюдения стрелком увеличенного видеоизображения цели, получаемого от первой дополнительной видеокамеры (с длиннофокусным объективом).
Кроме того, для обеспечения большей точности стрельбы (вычисления стрельбовых поправок) в процессе точного наведения оружия автоматически определяют расстояние до цели с помощью видеоизображения цели. Удаленность цели оценивают по параллактическому смешению ее изображения на стереопаре, полученной в результате одновременной регистрации изображений от первой дополнительной видеокамеры и идентичной ей второй дополнительной видеокамеры, разнесенных относительно друг друга на заданное расстояние, служащее стереоскопическим базисом.
Кроме того, для обеспечения защиты стрелка от вражеского огня во время поиска целей и наведения оружия удобно проводить данные операции находясь в укрытии, при этом разместив в проеме узкой бойницы видеокамеры, закрепленные на оружии ближе к дульному срезу.
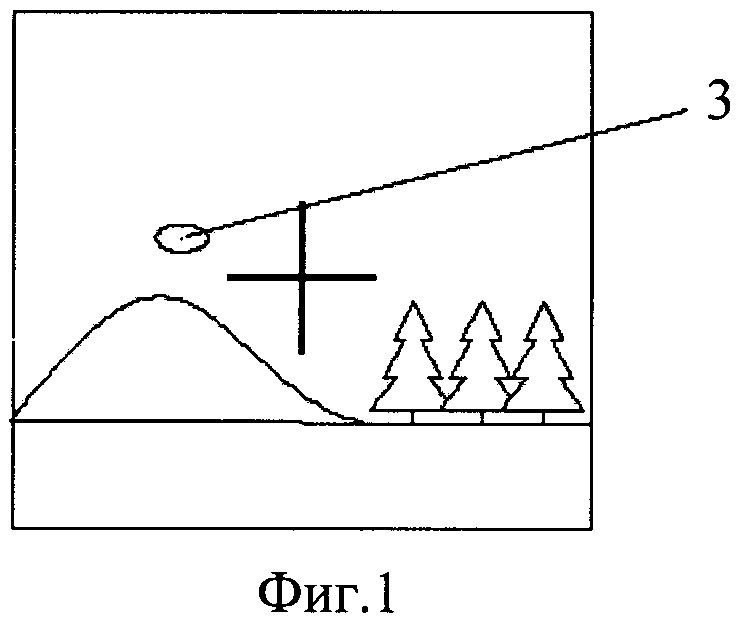
На фиг.1 схематично показано видеоизображение, транслируемое с обзорной видеокамеры.
На фиг.2 представлена общая схема варианта исполнения комплекса, реализующего данный способ.
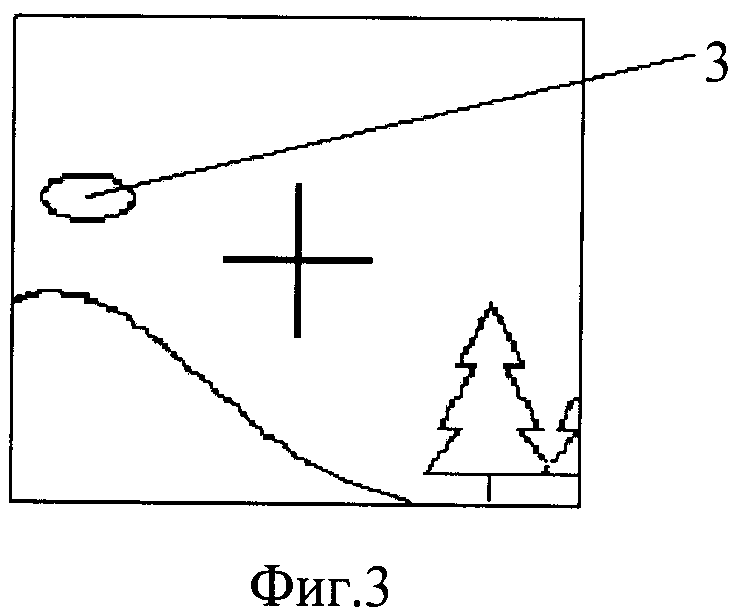
На фиг.3 схематично показано видеоизображение, транслируемое с первой дополнительной видеокамеры.
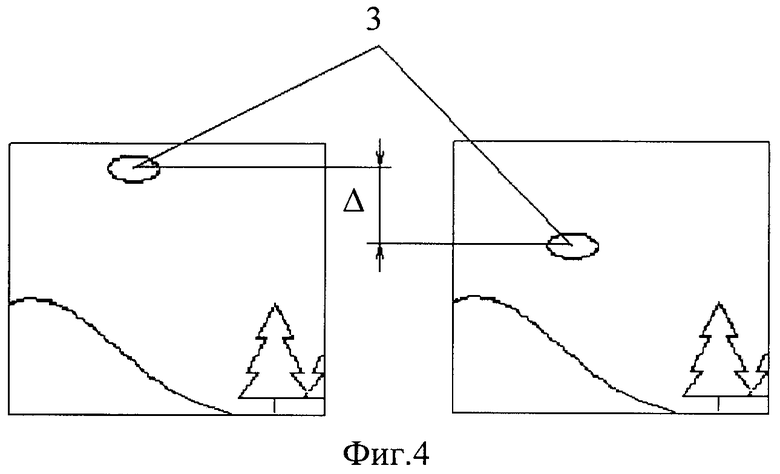
На фиг.4 схематично показаны два изображения (стереопара), одновременно зарегистрированные первой и второй дополнительными видеокамерами.
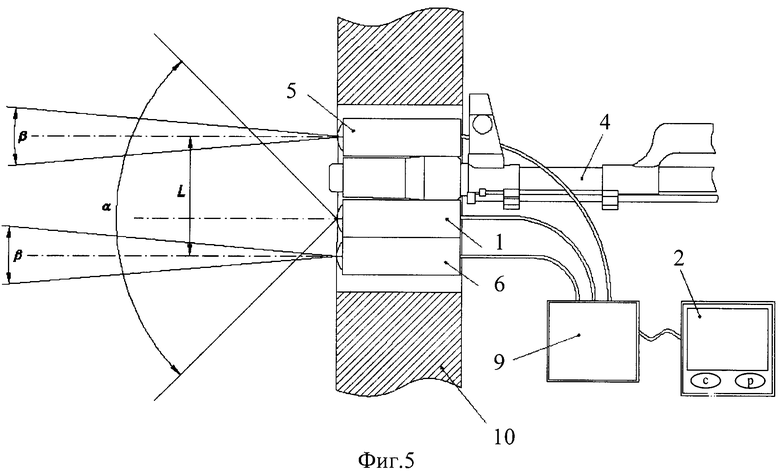
На фиг.5 представлена общая схема другого варианта исполнения комплекса, реализующего возможность измерения расстояния до цели.
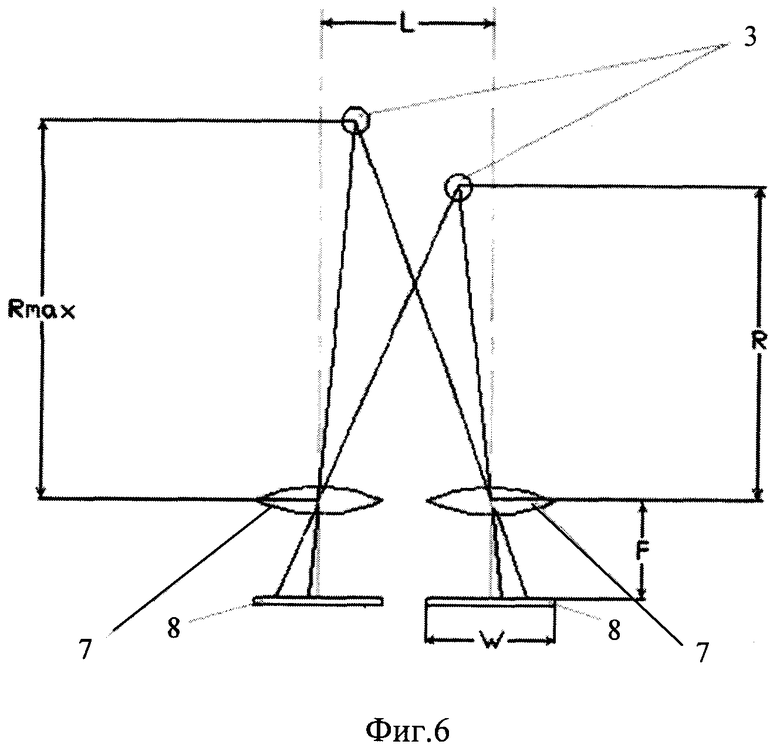
На фиг.6 схематично показан ход лучей при регистрации первой и второй дополнительными видеокамерами (показаны упрощенно) стереопары.
Способ реализуется следующим образом.
Стрелок наблюдает достаточно обширную область возможного появления цели по видеоизображению А с прицельной маркой (перекрестием), фиг.1, транслируемому с обзорной видеокамеры 1 (угол обзора α) на монитор 2, фиг.2. На видеоизображении А прицельная марка отмечает текущее направление стрельбы оружия, фиг.1.
В случае появления цели 4 на видеоизображении А, фиг.1, стрелок производит наведение оружия на цель посредством совмещения на мониторе прицельной марки с изображением цели, за счет угловых перемещений оружия. Возможность наведения обеспечивается тем, что обзорная видеокамера 1, снабженная широкоугольным объективом, установлена на оружии 3, фиг.2, с условием обеспечения параллельности главной оптической оси (г.о.о.) ее объектива направлению стрельбы оружия 3. На фиг.2 г.о.о. объектива обзорной видеокамеры 1 и направление стрельбы оружия 3 обозначены штрихпунктирными линиями.
При мелком или нечетком изображении цели на мониторе, стрелок проводит точное наведение оружия и контроль поражения цели по увеличенному видеоизображению области цели (видеоизображению Б) с прицельной маркой, фиг.3. Видеоизображение Б транслируется с первой дополнительной видеокамеры 5 (угол обзора β) на монитор 2, фиг.2. Точное наведение оружия происходит посредством совмещения прицельной марки и изображения цели на мониторе за счет угловых перемещений оружия. Возможность наведения обеспечивается тем, что первая дополнительная видеокамера 5 установлена на оружии 3 с условием обеспечения параллельности главных оптических осей объективов видеокамер 1, 5, фиг.2 (штрихпунктирные линии).
Для обеспечения большей точности стрельбы (вычисления стрельбовых поправок) в процессе точного прицеливания определяют расстояние R до цели 4, оцениваемое по параллактическому смешению Δ ее изображения на стереопаре, фиг.4. Стереопару получают в результате одновременной регистрации двух изображений с первой дополнительной видеокамеры 5 и идентичной ей второй дополнительной видеокамеры 6, фиг.5. При этом главные оптические оси объективов видеокамер 5, 6, установленных на оружии 3, параллельны и однонаправлены.
Расстояние R оценивается по следующей формуле:
R=(L*F*N)/(Δ*W),
где L - стереоскопический базис (расстояние между г.о.о. объективов 7 первой и второй дополнительных видеокамер), измеряемый в единицах длины, фиг.6;
F - расстояние от объектива 7 до матричного фотоприемника 8 (т.е. практически фокусное расстояние), измеряемое в единицах длины, фиг.6;
W - ширина чувствительной области матричного фотоприемника 8, измеряемая в единицах длины, фиг.6;
N - соответствующее ширине W число пикселей в строке матричного фотоприемника 8.
Параллактическое смещение Δ определяется путем формирования взаимокорреляционной функции двух зарегистрированных изображений (фиг.4) и определения ее максимума. Автоматическое вычисление параллактического смещения Δ может быть произведено электронным устройством 9, фиг.5.
Постоянные величины F, N, W, L определяют исходя из требуемой максимальной дальности Rmax измерения расстояния до цели, определяемой по формуле:
Rmax=(L*F*N)/W.
При этом параметры F, N, W определяются аппаратной реализацией оптоэлектронной части прицельного комплекса, а параметр L ограничивается габаритами бойницы 10, через которую ведется огонь, фиг.5.
Значение R, вычисленное электронным устройством 9, выводится бойцу на монитор 2. Стрелок, зная расстояние R, производит точное наведение оружия на цель с учетом поправки на стрельбу (определяемой по таблицам в зависимости от R), т.е. выносит прицельную марку на определенное расстояние относительно цели, ориентируясь по видеоизображению на мониторе.
Общая схема варианта исполнения комплекса, реализующего данный способ, представлена на фиг.2. Комплекс состоит из оружия 3 с закрепленными на нем при помощи хомутов и/или кронштейнов обзорной видеокамерой 1 и первой дополнительной видеокамерой 5. Комплекс также включает в себя монитор 4, который может быть закреплен на каске бойца или оружии 3. Видеокамеры 1, 5 закреплены на оружии 3 с обеспечением параллельности главных оптических осей (штрихпунктирные линии) их объективов направлению стрельбы из оружия 3. Монитор 2 соединен с видеокамерами проводными линиями связи. На мониторе 2 расположена кнопка селектора видеопотока (кнопка С). Источником электропитания всего комплекса служат сменные аккумуляторы, устанавливаемые в монитор 2.
Общая схема другого варианта исполнения комплекса, реализующего возможность измерения расстояния до цели, представлена на фиг.5. Комплекс включает в себя вторую дополнительную видеокамеру 6, закрепленную на оружии 3 хомутами или кронштейнами. Данная видеокамера идентична первой дополнительной видеокамере 5, при этом г.о.о. (штрихпунктирные линии) их объективов параллельны и однонаправлены. Все видеокамеры соединены проводными линиями связи с электронным устройством 9, представляющим собой в основе программируемую логическую интегральную микросхему. Электронное устройство 9 соединяется по проводной линии связи с монитором 2. На мониторе 2 расположена кнопка селектора видеопотока (кнопка С) и кнопка режима измерения расстояния (кнопка Р). Источником электропитания всего комплекса служат сменные аккумуляторы, устанавливаемые в электронное устройство 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЕДЕНИЯ ОГНЯ СТРЕЛКОВЫМ ОРУЖИЕМ | 2016 |
|
RU2644759C2 |
| СИСТЕМА ДЛЯ ВЕДЕНИЯ ПРИЦЕЛЬНОГО ОГНЯ ИЗ УКРЫТИЯ | 2008 |
|
RU2403526C2 |
| БЫСТРОСЪЕМНЫЙ ПРИЦЕЛ ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ | 2007 |
|
RU2362105C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2008 |
|
RU2383900C2 |
| Способ локализации появления цели среди стационарных объектов с движущегося носителя | 2024 |
|
RU2834194C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2331084C1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ И СТРЕЛКОВОЕ ОРУЖИЕ, СОДЕРЖАЩЕЕ ОПТИКО-МЕХАНИЧЕСКОЕ ПРИСПОСОБЛЕНИЕ | 2007 |
|
RU2368858C1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ | 2009 |
|
RU2430325C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОД ВОДОЙ | 2009 |
|
RU2424542C2 |
Изобретение относится к способам прицеливания оружия, ведущимся по видеоизображениям, получаемым от видеокамер, установленных на оружии. Способ включает поиск цели, наведение на нее оружия и совмещение прицельной марки с видеоизображением цели на мониторе, получаемым с обзорной видеокамеры. Поиск цели и наведение оружия проводят предварительно в широком телесном угле по видеоизображению. Точное наведение оружия и контроль поражения цели по увеличенному видеоизображению цели осуществляют посредством совмещения прицельной марки и видеоизображения цели на мониторе. Первая дополнительная видеокамера закреплена на оружии с обеспечением параллельности и однонаправленности главных оптических осей объективов обеих видеокамер. Технический результат заключается в повышении оперативности обнаружения цели и в повышении точности наведения на них. 2 з.п. ф-лы, 6 ил.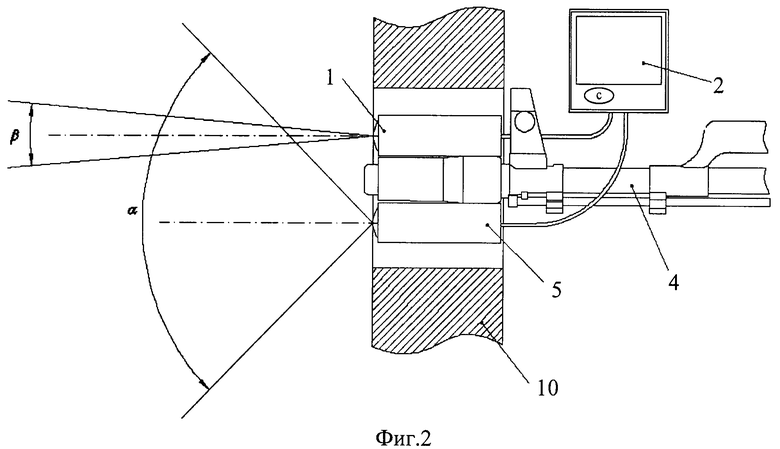
1. Способ прицеливания и контроля поражения цели при стрельбе, включающий поиск цели, наведение на нее оружия и совмещение прицельной марки с видеоизображением цели на мониторе, получаемым с обзорной видеокамеры, закрепленной на оружии, с обеспечением параллельности главной оптической оси ее объектива направлению стрельбы оружия, отличающийся тем, что поиск цели и наведение оружия проводят предварительно в широком телесном угле по видеоизображению, после чего осуществляют точное наведение оружия и контроль поражения цели по увеличенному видеоизображению цели посредством совмещения прицельной марки и видеоизображения цели на мониторе, получаемого от первой дополнительной видеокамеры, закрепленной на оружии, с обеспечением параллельности и однонаправленности главных оптических осей объективов обеих видеокамер.
2. Способ по п.1, отличающийся тем, что в процессе точного наведения оружия определяют расстояние до цели с помощью видеоизображения цели, полученного при одновременной регистрации видеоизображений цели от первой дополнительной видеокамеры и идентичной ей второй дополнительной видеокамеры, устанавливаемой на оружии с обеспечением параллельности и однонаправленности главных оптических осей объективов обеих дополнительных видеокамер, разнесенных друг относительно друга на заданное расстояние, служащее стереоскопическим базисом.
3. Способ по п.1 или 2, отличающийся тем, что поиск цели и наведение на нее оружия ведут из укрытия через узкую бойницу, позволяющую разместить в ее проеме видеокамеры, закрепленные на оружии ближе к дульному срезу.
| Штурмовая винтовка FAMAS, LegionEtrangere [on line] | |||
| Солесос | 1922 |
|
SU29A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ПРИЦЕЛИВАНИЯ И ВЫСТРЕЛА ИЗ СТРЕЛКОВОГО ОРУЖИЯ (ЕГО ВАРИАНТЫ) | 2002 |
|
RU2240485C2 |
| Станок для отделки валенок | 1927 |
|
SU59231A1 |
| US 4309095 A, 01.05.1982. | |||

