Настоящее изобретение относится к дистанционному управлению автоматической самозарядной стрелковой установкой и может быть использовано в военном деле, в частности в организации обороны блокпостов, охраны государственной границы, блокирования вооруженных формирований в захваченных зданиях, подготовке оборонительных позиций на пути выдвижения войск противника и т.п.
Развитие технического прогресса обуславливает появление новых перспективных технологий не только в мирных целях, но и в военном деле. Так, например, появление, а затем и совершенствование оптического прицела для ручного оружия, как показывает история развития стрелкового оружия, стало революционным прорывом. В процессе развития не только стрелкового, но и вооружения вообще, концепция «один выстрел - одна цель» и фактор защищенности стрелка-оператора стали одними из качественных критериев оценки современного оружия.
Из уровня техники известны различные способы и устройства, реализованные на данной основе.
Так, например, известен способ наведения станкового автоматического оружия на цель и устройство сопряжения станкового автоматического оружия с радиолокационным прицелом (патент РФ №2225582 С2, МПК F41G 3/00, опубл. 10.03.2004). По данному способу радиолокационный прицел - малогабаритную доплеровскую РЛС с дальностью действия, превышающей дальность действительного огня оружия, устанавливают на оружии с помощью устройства сопряжения. Антенну РЛС устанавливают на привод, обеспечивающий независимое от ствола оружия сканирование антенны РЛС по направлению. Положение антенны фиксируют на неподвижной части привода и в этом положении предварительно согласовывают ось канала ствола оружия с электрической осью диаграммы направленности антенны РЛС. После расфиксации антенны посредством ее сканирования производят поиск цели, определяют направление на цель и, удерживая антенну в направлении на цель, доводят положение ствола оружия по направлению на цель до стопорения антенны в положении совмещенных осей канала ствола оружия и антенны РЛС. С помощью РЛС по максимуму сигнала от цели уточняют направление на цель, определяют дальность и наводят оружие с зафиксированной на нем антенной по направлению и дальности для ведения стрельбы по цели. Устройство сопряжения включает амортизатор, который позволяет снизить перегрузки во время стрельбы. К основным недостаткам данного способа можно отнести использование в качестве радиолокационного прицела доплеровской РЛС, что приводит к расширению пассивных помех на нелинейном элементе и ухудшает их последующее подавление, подверженность системы к средствам радиоэлектронной борьбы противника и возможность обнаружения системы противником на расстояниях, превышающих дальность действия самой системы.
Также из уровня техники известна система для ведения прицельного огня из укрытия (патент РФ №2403526 С2, МПК F41G 3/16, опубл. 10.11.2010), содержащая стационарную аппаратуру видеонаблюдения за полем боя в зоне предполагаемых боевых действий, согласно изобретению аппаратура видеонаблюдения, выполненная с функциональной возможностью измерения расстояния до цели (целей), удалена от места ведения стрельбы из оружия, осуществляемой бойцом через бойницу, содержащую поворотный элемент для установки в нем оружия с образованием бронезащиты, при этом поворотный элемент взаимодействует с датчиком его углового положения, соединенным с электронным комплексом, осуществляющим обработку видеоизображений, выход которого подключен к интерфейсному устройству, передающему бойцу информацию о цели.
Основными недостатками данной системы являются применение ее только в долговременных огневых укреплениях и отсутствие мобильности смены места огневой точки.
Наиболее близким аналогом является способ ведения боевых действий и система дистанционного управления стрельбой, содержащая стационарную систему видеонаблюдения, установленную в зоне предполагаемых боевых действий, и систему управления стрелковым оружием на основе информации, полученной от системы видеонаблюдения (заявка на выдачу патента РФ №2005127400, МПК F41H 11/00, от 31.08.2005, опубл. 10.03.2007). По данному способу, по меньшей мере, одну единицу стрелкового оружия с видеокамерой и лазерным целеуказателем, работающим в режиме невидимого спектра излучения, устанавливают стационарно в зоне предполагаемых боевых действий, а управление прицеливанием и приведение в действие спускового механизма осуществляют дистанционно с применением компьютера и изображения, полученного с видеокамеры на экране монитора, при этом отметку лазерного целеуказателя на экране монитора преобразуют в видимый спектр. К недостаткам данного способа можно отнести недостаточно точную информацию о прицеливании, отсутствие в системе учета факторов окружающей среды и ландшафта местности и отсутствие в системе достаточно качественной компьютерной обработки информации о цели.
Технический результат данного изобретения заключается в возможности управлять системой любому оператору, имеющему навыки работы с компьютером и прошедшего курс обучения по данной программе (т.е. не требуются практические навыки снайпера); в возможности управляться дистанционно, не подвергая опасности человека, находящегося в защищенном месте, например блокпост, блиндаж и т.п., при этом оператор находится в относительно комфортных условиях; в возможности работать круглосуточно и без выходных (организована дежурная смена операторов); точность стрельбы не зависит от человеческого фактора (частота дыхания, удары сердца, техника спуска крючка, острота зрения, моргание, наличие боевого опыта, вычисление коррекции выстрела и т.п.); в возможности ведения огня по движущимся и воздушным целям; в исключении «замыливания» цели оператором.
Заявленный технический результат достигается за счет того, что способ дистанционного управления ведением снайперского огня, включающий генерацию информации о цели видеосистемой с привязкой к спутниковой навигационной системе, последующую ее передачу к системе управления оператором-стрелком одной или нескольким автоматическим стрелковым установкам и дальнейшую ее обработку оператором-стрелком с помощью программного обеспечения с целью последующей передачи корректирующих параметров непосредственно на одну или несколько стрелковых установок для совершения точного выстрела в цель по команде стрелка-оператора, отличающийся тем, что вводят необходимые начальные параметры для расчета необходимых баллистических поправок в искомое расстояние до цели с последующей его корректировкой в системе спутниковой навигации, а расстояние до цели определяют лазерным дальномером или с помощью с видеокамеры путем получения с нее изображений с ориентирами, до которых дальность уже известна, визирные оси которых выполняют параллельно оси со стволом стрелковой установки либо автономной от одной или нескольких стрелковых установок, затем посредством видеокамеры высокого разрешения, оснащенной электрическим обогревом и выполненной с возможностью вращения в горизонтальной и вертикальной плоскостях через монитор системы управления по полученным данным о искомом расстоянии до цели осуществляют корректировку линии оси ствола на цель для последующего выстрела по команде оператора-стрелка, которого вместе с монитором и пультом управления огнем размещают на безопасном расстоянии в защищенном месте.
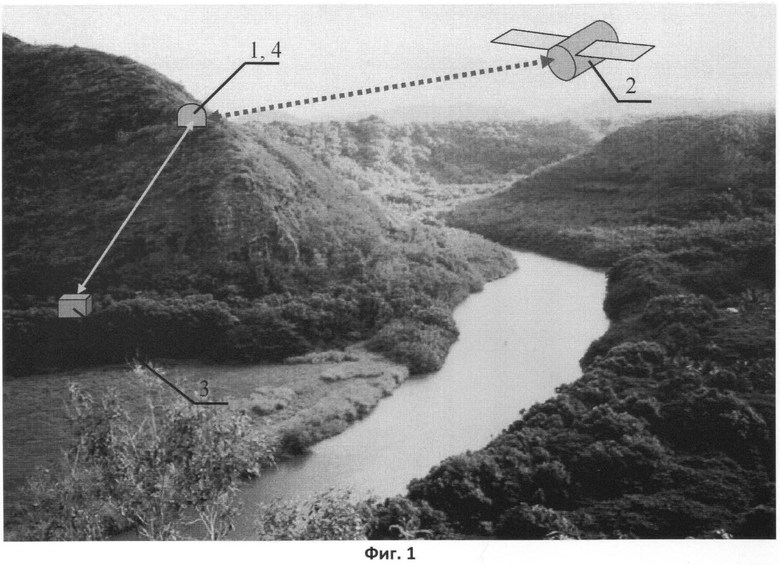
Сущность изобретения поясняется чертежами: на фиг.1 представлена схема взаимодействия системы управления, стрелковой установки, жестко и/или независимо совмещенной с видеосистемой, и спутника Глонасс; на фиг.2 - схема взаимодействия системы управления, стрелковыми установками, автономной видеосистемы и спутника Глонасс; на фиг.3 - схема стрелковой установки, жестко совмещенной с видеосистемой; на фиг.4 - схема независимых поворотных устройств автоматической стрелковой установки и системы видеонаблюдения; фиг.5 - схема автономной видеосистемы. Информация о цели фиксируется видеосистемой 1 с привязкой к системе Глонасс 2 (GPS), затем передается к системе управления 3 оператором-стрелком одной или нескольким автоматическим стрелковым установкам 4 и обрабатывается оператором-стрелком с помощью программного обеспечения с последующей передачей корректирующих параметров непосредственно на одну или несколько стрелковых установок 4 для совершения точного выстрела в цель по команде стрелка-оператора. При этом, заступая на дежурство, оператор-стрелок через специальные таблицы вводит в программное обеспечение начальные параметры: время суток, направление и скорость ветра, влажность, температуру воздуха и почвы, атмосферное давление, корректируемые в автоматическом режиме с помощью альтиметра, барометра и термометра, высоту над уровнем моря, параметры установки и снаряжение патронов, параметры, направление и скорость движения цели, расстояние до цели, определяемое с помощью встроенного лазерного дальномера и/или видеосистемы 1, жестко совмещенной по оси 5 со стволом 6 стрелковой установки 4 либо автономной от одной или нескольких стрелковых установок, посредством видеокамеры 7 высокого цифрового и оптического разрешения, оснащенной электрическим обогревом 8, через монитор системы управления с помощью программного обеспечения, которое вычисляет искомое расстояние до цели с последующей его корректировкой с системой Глонасс 2 (GPS). При этом на основании введенных параметров через программное обеспечение оператор-стрелок осуществляет корректировку выстрела с помощью баллистического калькулятора, который вычисляет, учитывая константные поправки на деривацию, баллистические коэффициенты, шаг нарезов ствола, стрельбу под углом к горизонту, особенности стрельбы в горной местности и через водные преграды, стрельбу по движущимся или воздушным целям, коррекцию относительно линии выстрела стрелковой установки 4 и цели и, с учетом рассчитанной коррекции, точно выставляет линию оси 5 ствола 6 на цель для последующего выстрела по команде оператора-стрелка.
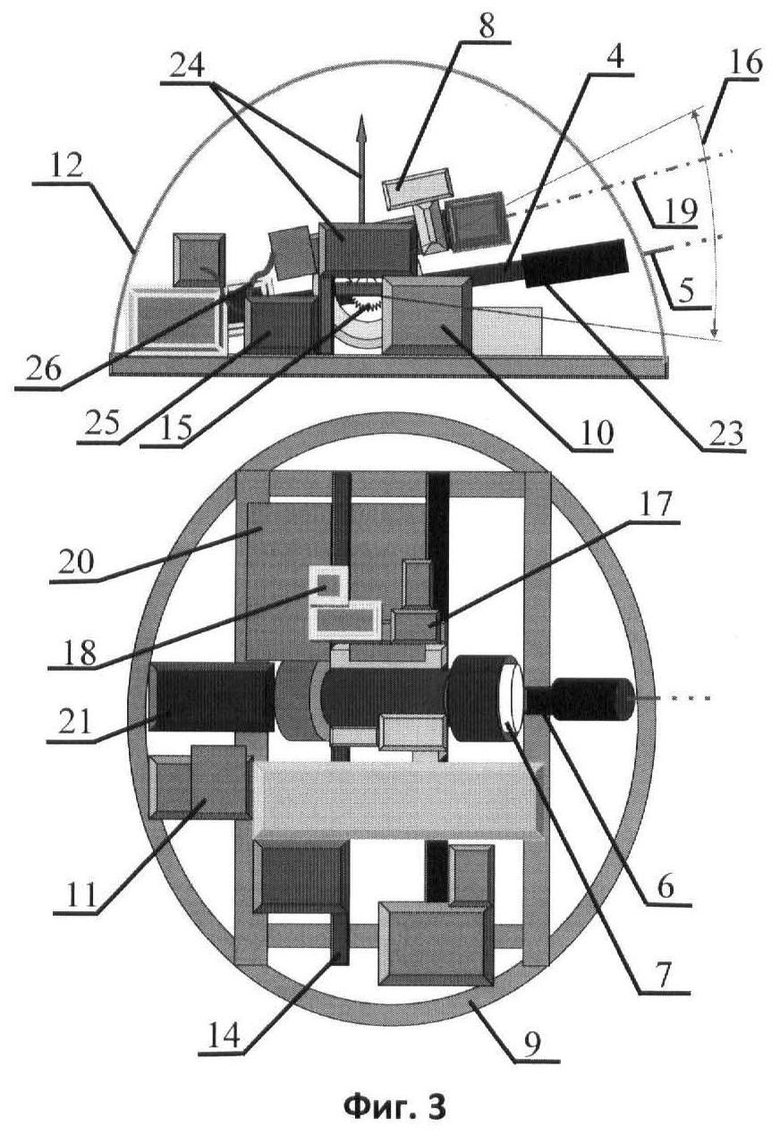
Способ дистанционного управления ведением снайперского огня может быть реализован посредством системы стрелковой установки с жестко совмещенной видеосистемой (фиг.3), которая содержит зубчатое колесо 9, выполненное с функцией поворота установки в горизонтальной плоскости с помощью основного редуктора с электроприводом 10 и редуктора точной наводки с микровинтом и электроприводом 11, горизонтальной турели с защитным кожухом 12 и рамой 13, на которой закреплены рама 14 вертикальной турели с зубчатым колесом 15, выполненным с возможностью поворота в вертикальной плоскости в секторе 16 ствола 6 автоматической стрелковой установки 4 посредством основного редуктора с электроприводом 17 и редуктора точной наводки с микровинтом и электроприводом 18, жестко совмещенных и всегда параллельных по линиям осей 5, 19 на нем ствола 6 автоматической стрелковой установки 4, содержащей контейнер боезапаса патронов 20, механизм автоматической зарядки-выстрела 21, и контейнер для сбора пустых гильз 22 с пламегасителем и глушителем 23 и видеокамеру 7, которая содержит механизм наведения резкости и обогрева оптики 8, с антенной и прибором 24 спутниковой системы Глонасс 2 (GPS). При этом на раме 13 горизонтальной турели также установлен электрощит 25 с кабельными линиями 26, функцией которого является управление электропитанием установки в целом.
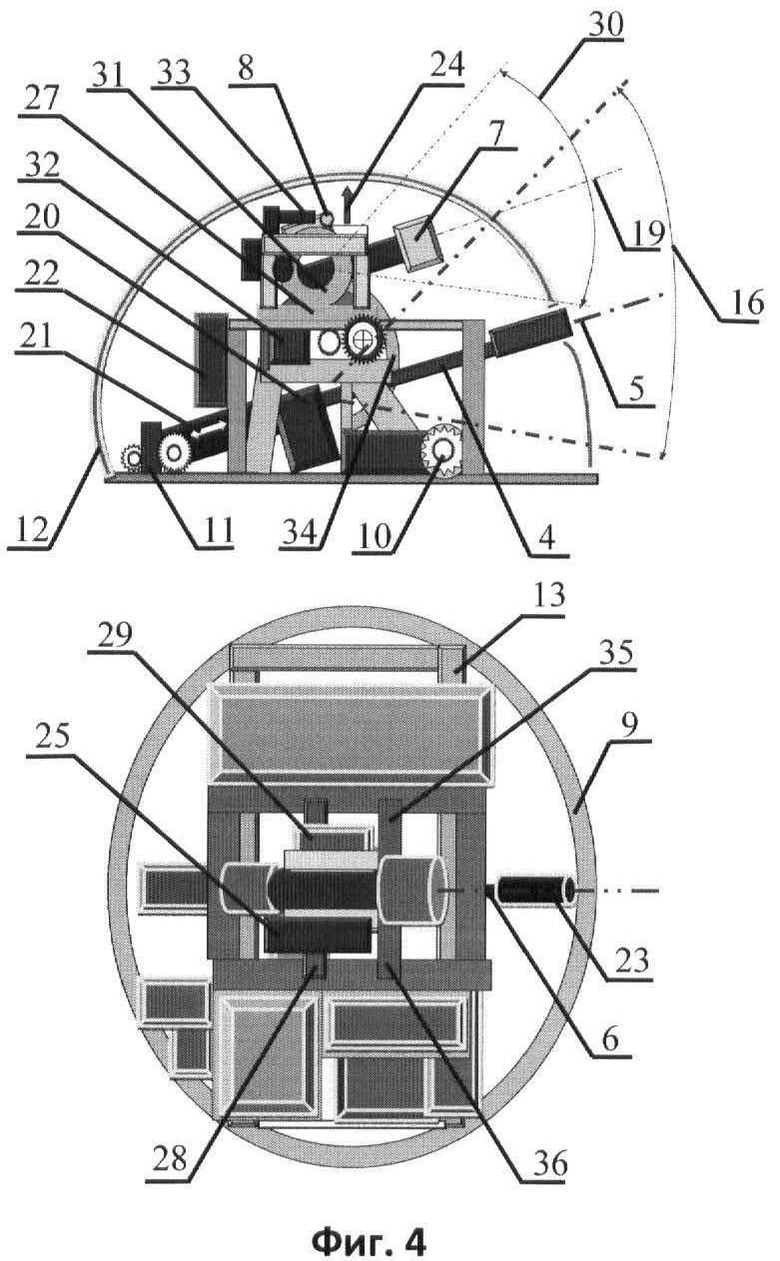
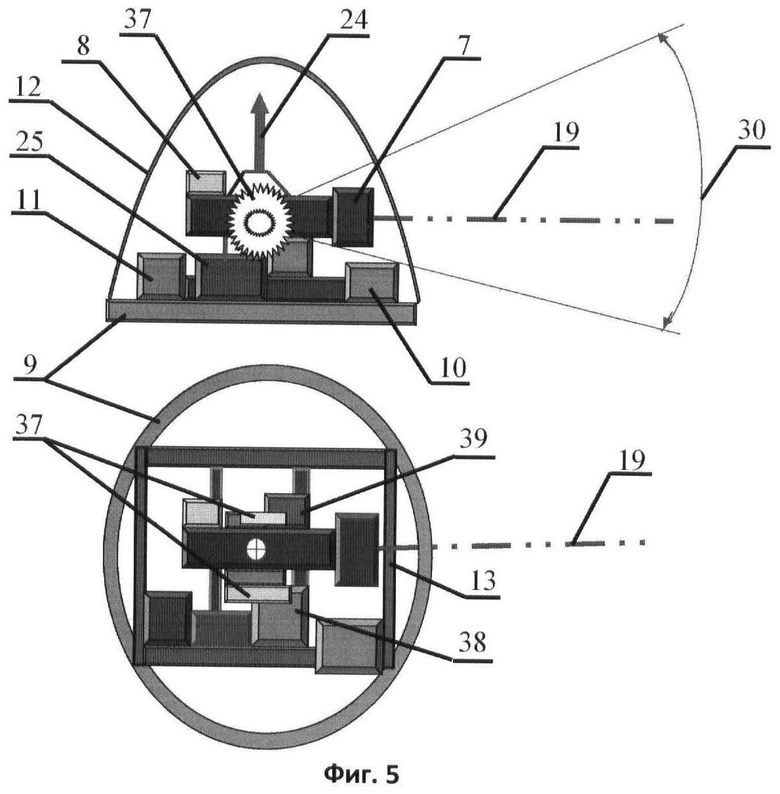
Способ дистанционного управления ведением снайперского огня может быть также реализован посредством системы независимых поворотных устройств автоматической стрелковой установки и системы видеонаблюдения (фиг.4), которая содержит зубчатое колесо 9, выполненное с функцией поворота установки в горизонтальной плоскости с помощью основного редуктора с электроприводом 10 и редуктора точной наводки с микровинтом и электроприводом 11, горизонтальной турели с защитным кожухом 12 и рамой 13, в верхней части которой закреплено зубчатое колесо 27, выполненное с функцией поворота видеокамеры 7 в горизонтальной плоскости посредством основного редуктора с электроприводом 28 и редуктора точной наводки с микровинтом и электроприводом 29. При этом видеокамера 7, которая содержит механизм наведения резкости и обогрева оптики 8, с антенной и прибором 24 спутниковой системы Глонасс 2 (GPS), выполнена с возможностью поворота в вертикальной плоскости в секторе 30 по оси 19 с помощью зубчатого колеса 31 посредством основного редуктора с электроприводом 32 и редуктора точной наводки с микровинтом и электроприводом 33. В нижней части рамы 13 расположена стрелковая установка 4, которая содержит контейнер боезапаса патронов 20, механизм автоматической зарядки-выстрела 21 и контейнер для сбора пустых гильз 22 с пламегасителем и глушителем 23, и выполнена с возможностью поворота в вертикальной плоскости в секторе 16 по оси 5 ствола 6 автоматической стрелковой установки с помощью зубчатого колеса 34 посредством основного редуктора с электроприводом 35 и редуктора точной наводки с микровинтом и электроприводом 36. При этом на раме 13 также установлен электрощит 25, функцией которого является управление электропитанием установки в целом. Способ дистанционного управления ведением снайперского огня также может быть реализован с помощью системы автономных стрелковых установок и автономной видеосистемы (фиг.5), которая содержит зубчатое колесо 9, выполненное с функцией поворота установки в горизонтальной плоскости с помощью основного редуктора с электроприводом 10 и редуктора точной наводки с микровинтом и электроприводом 11, горизонтальной турели с защитным кожухом 12 и рамой 13, на которой закреплено зубчатое колесо 37, выполненное с возможностью поворота видеокамеры 7, содержащей механизм наведения резкости и обогрева оптики 8, с антенной и прибором 24 спутниковой системы Глонасс 2 (GPS), в вертикальной плоскости в секторе 30 по оси 19 с помощью основного редуктора с электроприводом 38 и редуктора точной наводки с микровинтом и электроприводом 39.
Система, посредством которой осуществляется способ дистанционного управления ведением снайперского огня, работает следующим образом: стрелковая установка 4 управляется оператором-стрелком, находящимся на безопасном расстоянии, по кабельной линии, длина которой зависит от сопротивления кабеля и при применении промежуточных усилителей мощности может быть весьма значительна. Оператор-стрелок находится в защищенном месте с системой управления 3, на экране монитора выводится картинка с видеокамеры 7, выполненной с возможностью вращения в горизонтальной и вертикальной плоскостях при помощи зубчатых колес 9, 15 или 27, 31 или 37, 9 посредством основных редукторов 10, 17, 28, 38 и редукторов 11, 18, 29, 39 точной наводки с микровинтом с электроприводами, управление электропитанием которых осуществляется через электрощит 25 с кабельными линиями 26, а также карта местности с точными координатами стрелковой установки 4, определенными с помощью системы Глонасс 2 (GPS). Оператор вводит в программное обеспечение с помощью специальных таблиц начальные параметры: время суток, направление и скорость ветра, влажность, температуру воздуха и почвы, атмосферное давление, высоту над уровнем моря, параметры установки или установок 4 и снаряжение патронов и т.п. Далее в автоматическом режиме с помощью альтиметра, барометра и термометра в базу данных программы постоянно вводятся корректировки скорости и направления ветра, изменение температур и атмосферного давления. Оператор может задать параметры цели (грудная мишень, бегущий человек, мотоциклист, парашютист и т.д.), а также примерную скорость и направление движения. Оператор, используя встроенный лазерный дальномер, вводит в программу один из основных параметров - расстояние до цели. При отсутствии в установке лазерного дальномера оператор может и с помощью видеокамеры 7 определить расстояние до цели. Для этого на первой половине экрана монитора, отображающей картинку видеокамеры, определяется цель, а затем при помощи джойстика или «мышки» отмечается ее примерное расположение на карте данной местности, отображенной на второй половине монитора. Программное обеспечение по масштабу карты определяет расстояние от установки 4 до цели и разность в высотах. На основании введенных данных программное обеспечение производит корректировку выстрела с помощью баллистического калькулятора. Программное обеспечение учитывает константные поправки на деривацию, баллистические коэффициенты, шаг нарезов ствола 6, стрельбу под углом к горизонту, атмосферное давление и высоту над уровнем моря, особенности стрельбы в горной местности и через водные преграды, стрельбу по движущимся или воздушным целям и т.п., затем рассчитывает коррекцию относительно линии выстрела стрелковой установки 4 и цели, «пойманной» через оптическую ось 19 видеокамеры 7. Затем с учетом рассчитанной коррекции посредством зубчатых колес 9, 15 или 9, 34 при помощи основных редукторов 10, 17 или 10, 35 производятся повороты автоматической стрелковой установки 4 по горизонтальным и вертикальным турелям, а потом с помощью микровинтов редукторов 11, 18 или 11, 36 точно выставляется линия оси 5 ствола 6 на цель, и по команде оператора-стрелка производится выстрел.
Для случаев, когда автоматическая стрелковая установка 4 и система видеонаблюдения 1 имеют независимые поворотные системы либо независимую систему видеонаблюдения 1 и одну или несколько автономных автоматических стрелковых установок 4, производится поворот ствола стрелковой установки 4 на необходимые углы 16 по вертикали и горизонтали с учетом коррекции выстрела. Поворотные механизмы грубо и быстро разворачивают ствол 6 на определенный угол 16, а затем с помощью микровинтов 11, 36 тонкой поводки (редукторов с высоким передаточным числом с электроприводом) выставляют стрелковую установку 4 на выстрел с точностью до тысячных долей градусов, рассчитанных программным обеспечением. Углы 16 поворотов автоматических стрелковых установок могут быть различными в зависимости от секторов обстрела, географических особенностей местности (пересеченная, равнинная, горная) и поставленных задач (фронтальный и круговой обзор, стрельба по движущим целям или парашютистам).
Видеосистема 3 может быть установлена отдельно от автоматических самозарядных стрелковых установок и также управляться оператором на расстоянии. В этом случае по спутнику Глонасс 2 определяются координаты системы видеонаблюдения, а также всех автоматических стрелковых устройств 4. Координаты по высоте над уровнем моря, долготе и широте с точностью до десятых долей метра вводятся в оперативную базу компьютера данных для дальнейшей обработки при расчетах коррекции выстрела. Компьютер с помощью тригонометрических функций производит перерасчет параметров наведения на цель относительно координат системы видеонаблюдения и стрелковых установок 4.
В целом способ дистанционного управления ведением снайперского огня обеспечивает реализацию повышения точности поражения цели с поправкой на условия стрельбы в зависимости от погодных условий и факторов ландшафта местности с одновременной реализацией повышенного уровня безопасности и защищенности стрелка. Объясняется это тем, что данный способ несет в себе продуманные с технической точки зрения решения.
С точки зрения совокупности реализации технических систем данный способ имеет следующие преимущества.
1. Данной системой может управлять любой оператор, имеющий навыки работы с компьютером и прошедший курс обучения по данной программе.
2. Установка может управляться дистанционно, не подвергая опасности человека, находящегося в защищенном месте, например блок-пост, блиндаж и т.п., при этом оператор находится в относительно комфортных условиях.
3. Установка может работать круглосуточно и без выходных (организована дежурная смена операторов).
4. Точность стрельбы не зависит от человеческого фактора (частота дыхания, удары сердца, техника спуска крючка, острота зрения, моргание, наличие боевого опыта, вычисление коррекции выстрела и т.п.).
5. Ведение ночного огня (установка может быть оборудована прибором ночного видения).
6. Ведение огня по движущимся и воздушным целям. Оператор наводит видеокамеру на цель и фиксирует ее координаты в программе, затем через некоторый промежуток времени вновь наводит видеокамеру на цель и также автоматически фиксирует новые координаты. По введенным в программу координатам и разности временных параметров при фиксировании цели компьютер рассчитывает траекторию движения и наводит стрелковую установку на цель с учетом упреждения и коррекции баллистики, а также других параметров (скорость и направления ветра, температура, давление и т.п.) и производит выстрел через вычисленный программой интервал времени.
7. Исключение «замыливания» цели оператором, когда при постоянной картинке местности на мониторе, учитывая человеческий фактор, заметить незначительные перемены или изменения весьма сложно. Возможность настройки программы на наличие изменений в картинках по временной шкале, сравнивая стоп-кадры, с установленным интервалом времени программа может определить их различие и указать оператору на появление цели. Также используя программное обеспечение можно зафиксировать координаты (угловые величины) нескольких наиболее важных направлений (мосты, пересечение дорог, переправы, опорные пункты и т.д.). Программа в дежурном режиме поэтапно по установленному оператором циклу автоматически будет выходить на фиксированные точки, наводить на резкость и, сравнивая картинки видеонаблюдения, при наличии изменений, подавать определенный сигнал.
8. Точность и быстрота вычисления коррекции выстрела.
9. Ведения огня по движущимся целям мелкими очередями с упреждением.
10. Возможность применения программы для расчета параметров ведения огня артиллерийскими установками.
11. Возможность применения унифицированных систем маскировки установок.
12. Возможность использования установки в режиме пулеметного расчета.
13. Потенциальные возможности наземных стационарных и возимо-переносных автоматизированных комплексов вооружения позволяют эффективно применять их для решения самых различных задач. В зависимости от варианта исполнения, состава средств разведки и наведения, модулей вооружения и уровня внедрения высоких технологий они могут применяться для организации обороны блокпостов в горячих точках, охраны государственной границы, блокирования незаконных вооруженных формирований в захваченных зданиях, подготовки оборонительных позиций на пути выдвижения войск противника и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный боевой комплекс | 2018 |
|
RU2724448C1 |
| КОМПЛЕКС СТРЕЛЬБОВОЙ ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ ДЫМ-СК | 2008 |
|
RU2373483C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
| СИСТЕМА ДЛЯ ВЕДЕНИЯ ПРИЦЕЛЬНОГО ОГНЯ ИЗ УКРЫТИЯ | 2008 |
|
RU2403526C2 |
| СТРЕЛКОВЫЙ ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2013 |
|
RU2530464C1 |
| КОМПЛЕКС СТРЕЛЬБОВОЙ ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ ДЫМ-2 | 2018 |
|
RU2692196C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| СИСТЕМА ДЛЯ ПРОВЕДЕНИЯ АНТИТЕРРОРИСТИЧЕСКОЙ ОПЕРАЦИИ | 2009 |
|
RU2436028C2 |
| ОГНЕСТРЕЛЬНОЕ ОРУЖИЕ ДЛЯ ПРОВЕДЕНИЯ АНТИТЕРРОРИСТИЧЕСКОЙ ОПЕРАЦИИ | 2009 |
|
RU2456529C2 |
| БЕЗГИЛЬЗОВОЕ ОРУЖИЕ | 2013 |
|
RU2549599C1 |
Изобретение относится к дистанционному управлению автоматической стрелковой установкой и может быть использовано в военном деле. Способ дистанционного управления ведением снайперского огня включает генерацию информации о цели видеосистемой с привязкой к спутниковой навигационной системе, последующую ее передачу к системе управления оператором-стрелком одной или нескольким автоматическим стрелковым установкам и дальнейшую ее обработку оператором-стрелком с помощью программного обеспечения с целью последующей передачи корректирующих параметров непосредственно на одну или несколько стрелковых установок для совершения точного выстрела в цель по команде стрелка-оператора. При этом вводят начальные параметры для расчета баллистических поправок в искомое расстояние до цели с последующей его корректировкой в системе спутниковой навигации, определяют расстояние до цели оборудованием, визирная ось которого совмещена по оси со стволом стрелковой установки, осуществляют корректировку линии оси ствола на цель для последующего выстрела по команде оператора-стрелка, которого вместе с монитором и пультом управления огнем размещают на безопасном расстоянии в защищенном месте. Технический результат заключается в повышении точности стрельбы. 5 ил.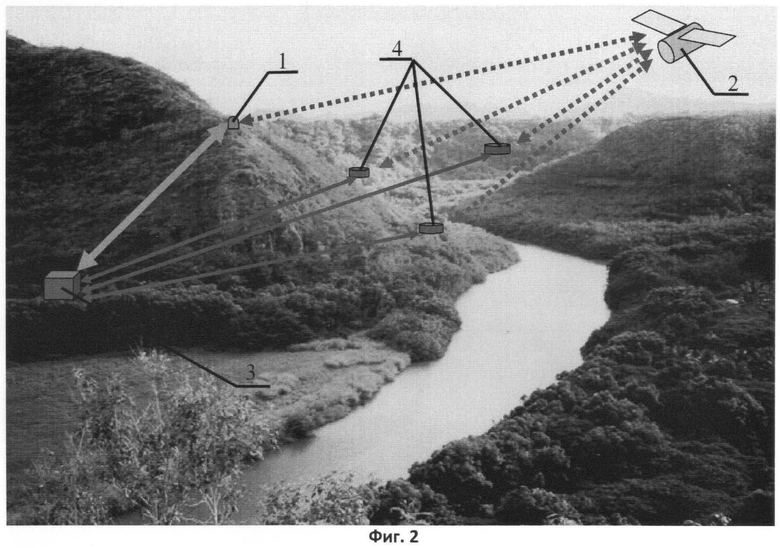
Способ дистанционного управления ведением снайперского огня, включающий генерацию информации о цели видеосистемой с привязкой к спутниковой навигационной системе, последующую ее передачу к системе управления оператором-стрелком одной или нескольким автоматическим стрелковым установкам и дальнейшую ее обработку оператором-стрелком с помощью программного обеспечения с целью последующей передачи корректирующих параметров непосредственно на одну или несколько стрелковых установок для совершения точного выстрела в цель по команде стрелка-оператора, отличающийся тем, что вводят необходимые начальные параметры для расчета необходимых баллистических поправок в искомое расстояние до цели с последующей его корректировкой в системе спутниковой навигации, а расстояние до цели определяют лазерным дальномером или с помощью видеокамеры путем получения с нее изображений с ориентирами, до которых дальность уже известна, визирные оси которых выполняют параллельно оси со стволом стрелковой установки, либо автономной от одной или нескольких стрелковых установок, затем посредством видеокамеры высокого разрешения, оснащенной электрическим обогревом и выполненной с возможностью вращения в горизонтальной и вертикальной плоскостях, через монитор системы управления по полученным данным о искомом расстоянии до цели осуществляют корректировку линии оси ствола на цель для последующего выстрела по команде оператора-стрелка, которого вместе с монитором и пультом управления огнем размещают на безопасном расстоянии в защищенном месте.
| RU 2005127400 А, 10.03.2007 | |||
| US 7210392 B2, 01.05.2007 | |||
| Устройство с электроприводом для закрывания и открывания крышки | 1959 |
|
SU127528A1 |
| US 20110056367 A1, 10.03.2011. | |||

