Изобретение относится к радиолокационной технике и может использоваться для обеспечения безопасных полетов вертолетов, а именно для предупреждения их столкновений с высоковольтными линиями электропередач.
Известен способ предотвращения столкновений вертолета с высоковольтными линиями электропередач, заключающийся в том, что принимают электромагнитные колебания с помощью приемного устройства, размещаемого на вертолете, прием электромагнитных колебаний осуществляют в диапазоне радиоволн, излучаемых высоковольтными линиями электропередач, при этом прием излучаемых высоковольтными линиями электропередач электромагнитных колебаний ведут с различных направлений с помощью нескольких приемных антенн, максимумы диаграмм направленности которых ориентированы в разных угловых секторах плоскости полета вертолета, и по наличию сигнала в одной из приемных антенн определяют угловое положение проводов высоковольтной линии электропередач относительно корпуса вертолета, сравнивают значения принятого сигнала с опорными напряжениями, соответствующими величинам напряженности электромагнитного поля, излучаемого высоковольтной линией электропередачи на известном расстоянии от нее, и по результатам сравнения принимают решение по корректировке направления полета вертолета. (Патент РФ на изобретение №2156985, G01S 13/93, G08G 5/04, опубл. 27.09.2000).
Недостатком данного способа предотвращения столкновений вертолета с высоковольтными линиями электропередач является зависимость результатов измерения от погодных условий. Так, уровни напряженности электромагнитного поля, излучаемого линией электропередач, вызванные высокочастотными переходными процессами могут быть на 10-20 дБ больше при высокой влажности, тумане или дожде, чем при сухой погоде (Дональд Р.Ж. Уайт Электромагнитная совместимость радиоэлектронных средств и непреднамеренные помехи. Выпуск 1. Общие вопросы ЭМС. Межсистемные помехи. М.: Советское радио. 1977), в результате чего при обработке сигнала растет ошибка определения кратчайшего расстояния до линии электропередач. Кроме того способ не работоспособен при выключении напряжения в линии электропередач.
Технической задачей изобретения является устранение указанных недостатков.
Технический результат изобретения достигается тем, что в способе предотвращения столкновений вертолета с высоковольтными линиями электропередач, заключающемся в том, что принимают электромагнитные колебания с помощью приемного устройства, размещаемого на вертолете, прием электромагнитных колебаний осуществляют в диапазоне радиоволн, дополнительно осуществляют излучение и прием сигналов первым и вторым пеленгаторами, установленными на вертолете и расположенными по фронту на расстоянии Б друг от друга, каждый из пеленгаторов сканирует пространство по направлению полета вертолета, причем первый пеленгатор осуществляет сканирование против часовой стрелки, а второй - по часовой стрелке, определяют углы пеленга каждой из двух опор линии электропередач каждым пеленгатором, причем α1 и α2 - углы пеленга, определяемые первым пеленгатором первой и второй опор линии электропередач, a β1 и β2 - углы пеленга, определяемые вторым пеленгатором первой и второй опор линии электропередач относительно строительной оси вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета из выражения

где Б - расстояние между пеленгаторами, µ - угол между линией электропередач и строительной осью вертолета, определяемый из выражения
где 

исходя из значения дальности, принимают решение по корректировке направления полета вертолета.
На фиг.1 представлена схема дополнительных построений для вывода формулы определения расстояния до линии электропередач, где:
CD - высоковольтная линия электропередач;
С - точка размещения первой опоры линии электропередач;
D - точка размещения второй опоры линии электропередач;
А - точка размещения первого пеленгатора;
В - точка размещения второго пеленгатора.
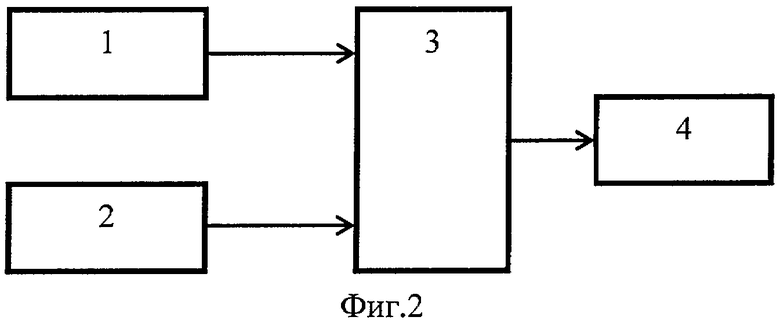
Для пояснения предполагаемого способа как процесса выполнения действий над материальным объектом с помощью материальных средств и подтверждения возможности осуществления заявляемого изобретения, на фиг.2 представлена функциональная схема устройства для реализации способа предотвращения столкновений вертолета с высоковольтными линиями электропередач, где:
1,2 - пеленгаторы; 3 - вычислитель; 4 - индикатор.
Устройство для предотвращения столкновений вертолета с высоковольтными линиями электропередач, содержит последовательно соединенные первый 1 пеленгатор, вычислитель 3 и индикатор 4, причем второй вход вычислителя 3 соединен с выходом второго 2 пеленгатора.
В качестве первого 1 и второго 2 пеленгаторов могут быть использованы радиолокационные сканирующие пеленгаторы, осуществляющие излучение и прием электромагнитной энергии и выдающие на выходе пеленг обнаруженного объекта.
Устройство работает следующим образом.
На фиг.1 в точках С и D расположены опоры линии электропередач (ЛЭП). Прямая, проходящая через указанные точки - провода линии электропередач.
Вертолет находится в точке О и выполняет полет в направлении линии OF. Из чертежа видно, что отрезок OF является дальностью проводов ЛЭП до вертолета - DЛЭП. На вертолете в точках А и В размещены два пеленгатора (радиолокационного типа, либо оптико-электронного). Пеленгаторы разнесены друг относительно друга на расстояние АВ, которое обозначено буквой Б.
Каждый из пеленгаторов сканирует пространство, причем пеленгатор, расположенный в точке А, осуществляет сканирование против часовой стрелки, а пеленгатор, расположенный в точке В - по часовой стрелке. Пеленги объектов - α1 α2, β1 β2, измеряемые пеленгаторами, отсчитываются от линии, проходящей через пеленгатор, которая параллельна строительной оси вертолета.
Правило знаков для пеленгов следующее. Для пеленгатора, расположенного в точке А, пеленг считается положительным, если направление его отсчета совпадает с положительным движением часовой стрелки. На фиг.1 пеленг опоры ЛЭП - D - α2 положителен, пеленг опоры С - α1 отрицателен. Для пеленгатора, расположенного в точке В, пеленг считается положительным, если направление его отсчета совпадает с обратным движением часовой стрелки.
При сканировании пространства пеленгаторами, расположенными в точках А и В, измеряют пеленги опор ЛЭП. Пеленги опоры С - α1 β1 а опоры D - α2, β2. Кроме того известна база Б - расстояние между пеленгаторами.
Дальность до проводов ЛЭП, согласно фиг.1, определяют как

На фиг.1 видно, что
Рассмотрим определение координат опоры С (СМ и МА).
Используя теорему синусов, получим
Или

Отрезок СМ=ОК определится с учетом формулы (3)

Величина отрезка MA определится

Получим аналогичные формулы для опоры D



Угол µ определяет направление ЛЭП по отношению к направлению полета вертолета.
Тангенс этого угла, согласно фиг.1, определяется как

Или


Тогда дальность до проводов ЛЭП будет определяться формулой

После преобразований получим

Значение дальности до линии передачи электроэнергии индицируется индикатором 4 и служит для предупреждения столкновений вертолета с высоковольтными линиями электропередач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410719C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410720C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410718C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2441254C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПОРЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2011 |
|
RU2472177C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2012 |
|
RU2510800C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПОРЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410709C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2416850C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2411541C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2308738C1 |
Изобретение относится к радиолокационной технике и может использоваться для обеспечения безопасных полетов вертолетов. Достигаемым техническим результатом является повышение точности определения допустимого кратчайшего расстояния между вертолетом и линией электропередач. Способ заключается в приеме электромагнитных колебаний, отраженных от опор линии передачи электроэнергии, в диапазоне радиоволн первым и вторым пеленгаторами, размещенными на вертолете и расположенными по фронту на расстоянии Б друг от друга. Каждый из пеленгаторов сканирует пространство по направлению полета вертолета, причем первый пеленгатор осуществляет сканирование против часовой стрелки, а второй - по часовой стрелке, определяют углы пеленга каждой из двух опор линии электропередач каждым пеленгатором, причем α1 и α2 - углы пеленга определяют первым пеленгатором первой и второй опоры линии электропередач, a β1 и β2 - углы пеленга - вторым пеленгатором первой и второй опоры линии электропередач относительно строительной оси вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета с помощью соответствующей вычислительной формулы и исходя из значения дальности принимают решение по корректировке направления полета вертолета. 2 ил.
Способ предотвращения столкновений вертолета с высоковольтными линиями электропередач, заключающийся в том, что осуществляют прием сигналов в диапазоне радиоволн, отличающийся тем, что излучение и прием сигналов осуществляют первым и вторым пеленгаторами, установленными на вертолете и расположенными по фронту на расстоянии Б друг от друга, каждый из пеленгаторов сканирует пространство по направлению полета вертолета, причем первый пеленгатор осуществляет сканирование против часовой стрелки, а второй - по часовой стрелке, определяют углы пеленга каждой из двух опор линии электропередач каждым пеленгатором, причем α1 и α2 - углы пеленга определяют первым пеленгатором первой и второй опоры линии электропередач, a β1 и β2 - углы пеленга определяют вторым пеленгатором первой и второй опоры линии электропередач относительно строительной оси вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета из выражения  где Б - расстояние между пеленгаторами, µ - угол между линией электропередач и строительной осью вертолета, определяемый из выражения где
где Б - расстояние между пеленгаторами, µ - угол между линией электропередач и строительной осью вертолета, определяемый из выражения где
исходя из значения дальности, принимают решение по корректировке направления полета вертолета.
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1998 |
|
RU2156985C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2006 |
|
RU2309433C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1999 |
|
RU2176400C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2308738C1 |
| US 2003125849 A1, 03.07.2003 | |||
| JP 6105584 A, 14.03.1986 | |||
| US 6114975 A, 05.09.2000. | |||

