Изобретение относится к области автоматического управления и может быть использовано в регуляторах температуры, уровня, концентрации и др. Объект управления представляет собой инерционное звено первого порядка.
Известны системы автоматического управления объектами первого порядка по пропорциональному (П-регулятор) и пропорционально-интегральному (ПИ-регулятор) законам регулирования (Ротач В.Я. Расчет настройки промышленных систем регулирования, М., 1961. - С. 170-177). Недостатками систем регулирования являются: наличие статической погрешности у П-регулятора, большое время регулирования у ПИ-регулятора и значительные затраты энергии при управлении объектом для обоих видов регуляторов.
Известна система оптимального управления (заявка Японии N 61-249101, МКИ G 05 B 13/02. Система оптимального управления, опубл. 06.11.1986), обеспечивающая устойчивость даже в наиболее тяжелых условиях управления, которая в отличие от регуляторов по [Ротач В.Я. Расчет настройки промышленных систем регулирования, М. , 1961. - С. 170-177) идентифицирует параметры регулируемого объекта. Однако указанная система регулирования не определяет автоматически требуемого времени перевода объекта из одного состояния в другое и не обеспечивает синтез оптимального управления в реальном времени для возможных состояний функционирования при минимизации затрат энергии.
По технической сущности наиболее близкой к предлагаемому изобретению является система, которая предусматривает формирование по сигналу отклонения регулируемого параметра пропорционального управления одним каналом, а другим каналом - релейного управления по специально сформированному сигналу для достижения цели управления (повышение точности управления при независимости ее от действия внешних возмущений) (авторское свидетельство СССР N 805247. Способ управления, G 05 B 13/02, Бюл. N 6, 1981). Однако эта система не позволяет получать управляющее воздействие, которое одновременно с устранением отклонения регулируемого параметра требует минимальных затрат энергии и не обеспечивает требуемого запаса устойчивости процесса регулирования при возможных изменениях параметров объекта. Следует отметить также недостаточную надежность устройства, реализующего данный способ, вследствие последовательного включения первого и второго каналов.
Техническая задача создания и функционирования энергосберегающей многофункциональной системы автоматического управления заключается в следующем:
- имеется объект, описываемый дифференциальным уравнением первого порядка, регулируемая величина которого (температура, концентрация, уровень...) может отклоняться от задаваемого значения вследствие влияния возмущающих воздействий (например, изменения температуры окружающей среды, увеличение нагрузки и т.п.);
- управление объектом осуществляется с помощью энергосберегающей многофункциональной системы автоматического управления, которая должна выполнять следующие функции:
а) функцию стабилизирующего регулятора (ПИ-регулятора, П-регулятора...) при малых отклонениях регулируемой величины от заданного значения;
б) функцию оптимального управляющего устройства, которое в реальном времени решает задачу синтеза оптимальных управляющих воздействий по критерию минимума затрат энергии, если регулируемая величина отклоняется от заданного значения на величину больше допустимой;
в) функцию идентификации параметров объекта с целью повышения устойчивости работы системы и увеличения ее надежности.
На фиг. 1 представлена структурная схема системы. Схема содержит объект управления 1, датчик текущего значения регулируемой величины 2, задатчик параметров настройки регулирующего устройства 3, задатчик заданного значения регулируемой величины 4, блок сравнения 5, регулирующее устройство 6, исполнительный механизм 7, задатчик-идентификатор параметров объекта 8, задатчик параметров зависимости для расчета временного интервала управления 9, задатчик отклонения регулируемой величины от заданного значения определяющего режим работы 10, блок времени 11, блок расчета временного интервала управления 12, блок выбора режима работы 13, блок формирования синтезирующего сигнала 14, блок синтеза оптимального управления 15, блок переключения управляющего воздействия 16. Причем первый выход объекта управления 1 соединен со входом задатчика-идентификатора параметров объекта управления 8, а второй выход - со входом датчика текущего значения регулируемой величины 2, выход которого соединен с первыми входами блоков формирования синтезирующего сигнала 14, синтеза оптимального управления 15 и сравнения 5, второй вход последнего соединен с выходом задатчика заданного значения регулируемой величины 4, четвертым входом блока формирования синтезирующего сигнала 14 и пятым входом блока синтеза оптимального управления 15, а выход - с первыми входами блоков расчета временного интервала управления 12, выбора режимов работы 13 и регулирующего устройства 6, второй вход которого соединен с выходом задатчика параметров настройки регулирующего устройства 3, а выход - с первым входом блока переключения управляющего воздействия 16, третий вход которого соединен со вторым выходом блока выбора режима работы 13, второй вход которого соединен с выходом задатчика отклонения регулируемой величины от заданного значения 10, а выход - с четвертым входом блока расчета временного интервала управления 12, второй вход которого соединен с выходом задатчика параметров зависимости для расчета временного интервала управления 9, третий вход - с первым выходом блока синтеза оптимального управления 15, первый выход - со входом блока времени 11, а второй выход - со вторым входом блока формирования синтезирующего сигнала 14, выход которого соединен со вторым входом блока синтеза оптимального управления 15, третий вход которого соединен с третьим входом блока 14 и выходом задатчика-идентификатора параметров объекта 8, четвертый вход - с выходом блока времени 11, пятый вход - с выходом задатчика заданного значения регулируемой величины 4, а второй выход - со вторым входом блока переключения управляющего воздействия 16, выход которого соединен со входом исполнительного механизма 7, в свою очередь, выход последнего соединен с первым входом объекта управления 1, на второй вход которого поступает возмущающее воздействие.
На фиг. 2 приведена структурная схема блока 15 синтеза оптимального управления. Схема блока содержит модули 15.1 - 15.8 проверки существования оптимального управления U модули 15.9 - 15.16 формирования управляющего воздействия в соответствии с синтезирующими функциями
модули 15.9 - 15.16 формирования управляющего воздействия в соответствии с синтезирующими функциями  модуль 15.17 выработки оптимального управляющего воздействия и модуль 15.18 формирования сигнала на увеличение временного интервала управления. Причем входы модулей 15.1 - 15.8 соединены со вторым входом блока 15, а выходы соответственно с 1, 2, ..., 8 входами модуля 15.18 и вторыми входами модулей 15.9 - 15.16 соответственно, первые входы которых соединены с первым входом блока, третьи входы - с третьим входом блока, четвертые - с четвертым, пятые - с пятым, а выходы со входом модуля 15.17, выход которого соединен со вторым выходом блока 15, а первый выход блока соединен с выходом блока 15.18.
модуль 15.17 выработки оптимального управляющего воздействия и модуль 15.18 формирования сигнала на увеличение временного интервала управления. Причем входы модулей 15.1 - 15.8 соединены со вторым входом блока 15, а выходы соответственно с 1, 2, ..., 8 входами модуля 15.18 и вторыми входами модулей 15.9 - 15.16 соответственно, первые входы которых соединены с первым входом блока, третьи входы - с третьим входом блока, четвертые - с четвертым, пятые - с пятым, а выходы со входом модуля 15.17, выход которого соединен со вторым выходом блока 15, а первый выход блока соединен с выходом блока 15.18.
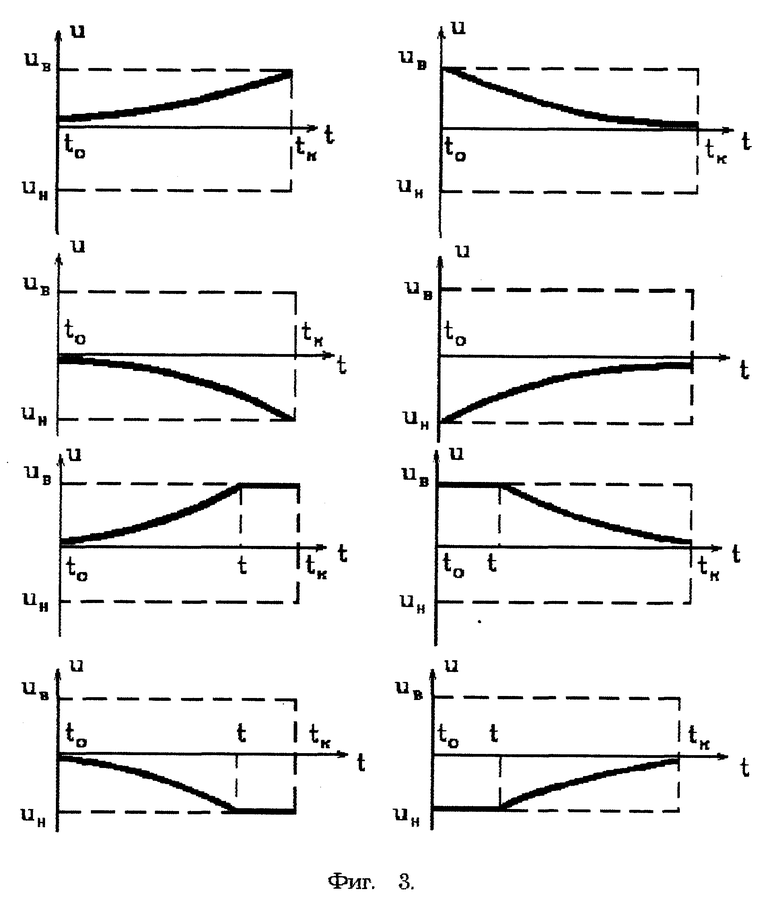
На фиг. 3 представлены восемь видов оптимального управления, минимизирующего затраты энергии.
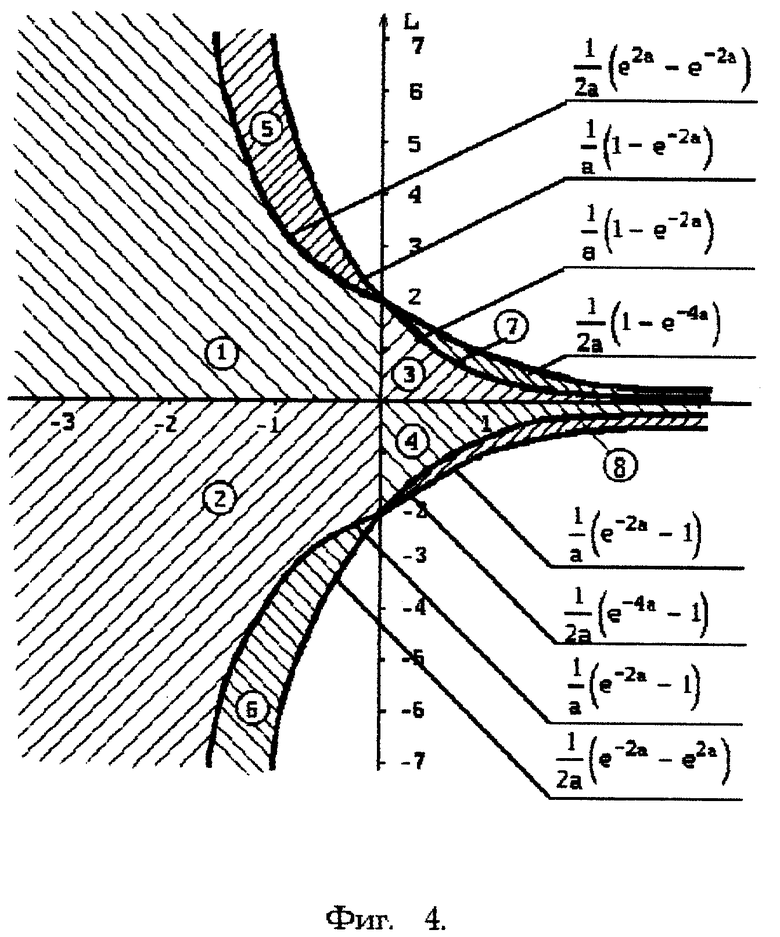
На фиг. 4 приведены области существования восьми видов оптимального управления.
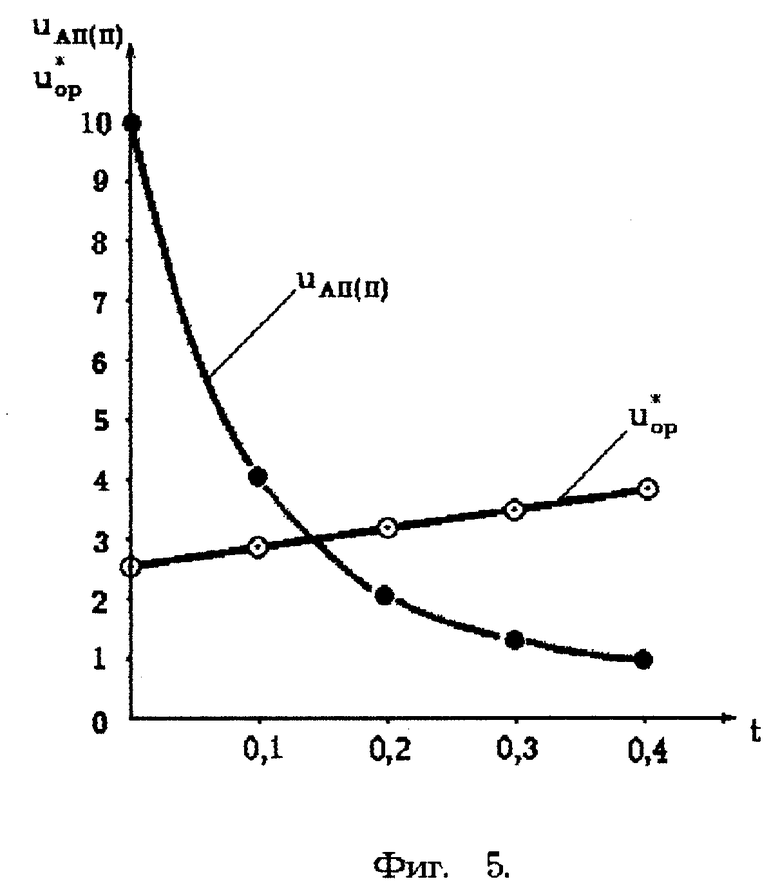
На фиг. 5 представлены графические зависимости изменения управляющих воздействий на объект по двум каналам (первом канале П-регулятор) при скачкообразном изменении заданного значения регулируемой величины.
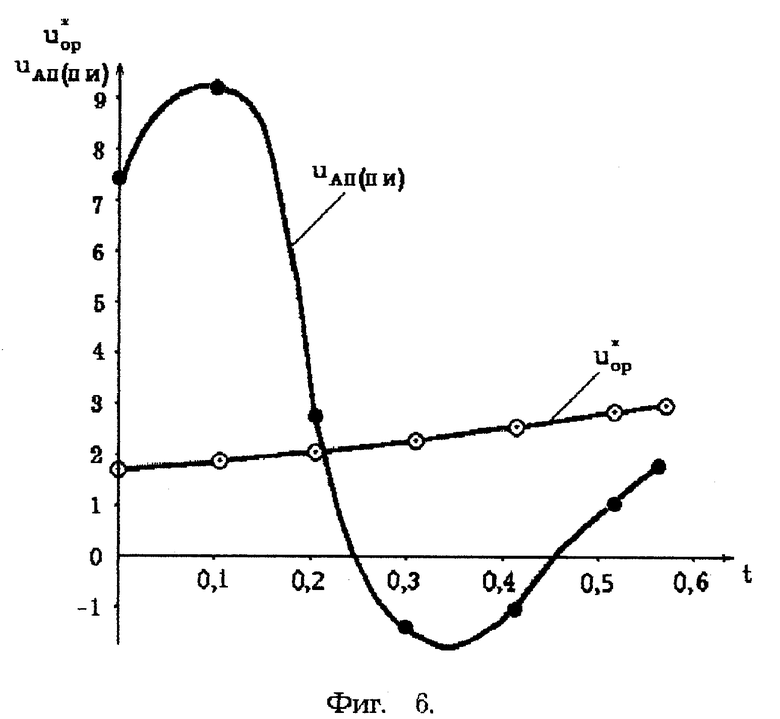
На фиг. 6 представлены графические зависимости изменения управляющих воздействий на объект по двум каналам (в первом канале ПИ-регулятор) при скачкообразном изменении заданного значения регулируемой величины.
Работа систем автоматического управления состоит в следующем. Сигнал, соответствующий значению выхода объекта управления (регулируемой величины), с соответствующего датчика поступает в блок сравнения, где сравнивается с сигналом, соответствующим заданному (требуемому) значению регулируемой величины. В зависимости от разности двух этих сигналов система работает в одном из двух режимов работы, т. е. включается первый или второй канал. В случае, когда разность сигналов меньше установленного заранее задаваемого значения, система работает в соответствии с известным законом автоматического регулирования (П или ПИ), действует первый канал. В случае, когда при изменении задания регулируемой величины или возмущающего воздействия разность текущего и заданного значений регулируемой величины превышает установленное значение, система работает в режиме оптимального по минимуму затрат энергии управления объектом, т. е. управляющее воздействие вырабатывается вторым каналом. Для этого определяется интервал времени выхода объекта на заданное значение регулируемой величины, который зависит от величины рассогласования текущего и заданного значений регулируемой величины. С использованием полученного интервала времени и значений параметров объекта в соответствии с позиционной стратегией вырабатывается оптимальное управляющее воздействие, обеспечивающее перевод объекта в состояние с заданным значением регулируемой величины за полученный интервал времени с минимальными затратами энергии.
Величина временного интервала берется соответствующей времени регулирования при используемом законе регулирования. Для определения вида и параметров синтезирующей функции оптимального управления предварительно формируется синтезирующий сигнал. По значению синтезирующего сигнала и параметра объекта проверяется условие существования оптимального управления для полученного интервала времени. В случае, когда оптимальное управление не существует, интервал времени управления корректируется.
В результате значительные рассогласования регулируемой величины с заданным значением ликвидируются с минимальными затратами энергии. Когда отклонение выходной величины от заданного будет меньше допустимого, для управления объектом включается автоматический регулятор.
Функционирование системы, представленной на фиг. 1, производится следующим образом.
В регулятор (блоки 2, 3, 5, 6, 7), поддерживающий регулируемую величину Y объекта управления,
на заданном уровне вводят (блоки 4, 8, 9, 10) заданное значение регулируемой величины yз, отклонение Δyp, определяющие режим работы регулятора, зависимость величины временного интервала устранения значительных (больше Δyp) отклонений выходной величины y(t) от yз, от величины (yз - y(t)) этих отклонений, а также параметры объекта T0, k0.
В случае, когда
|(yз-y(t))|Δ = |Δy(t)| < Δyp, (2)
регулятор работает в режиме выбранного закона регулирования (П или ПИ), т. е. объект управления 1 и блоки 2, 3, 5, 6, 7 представляют собой обычную систему автоматического регулирования.
В случае, когда в момент θo неравенство (2) нарушается, сигнал, соответствующий разности Δy(θo), поступает в блок 12, где определяется временной интервал управления Δto, и далее в блоках 14, 15 синтезируется в реальном времени оптимальное управление u*(t/Δy(θo)), переводящее объект из состояния y(θ) в y(θo+Δto) = yз за время Δt с минимальными затратами энергии, т.е.

Управление u* должно также удовлетворять естественному ограничению
∀t ∈ [θo;θo+Δt] uн ≤ u*(t) ≤ uв. (4)
В случае, когда в момент времени θ1 ∈ [θo;θo+Δto] разность Δy(θ1) превысит Δy(θo), определяется новое значение Δt1 и u*(t/Δ(θ1)) и т.д. Увеличение разности Δy(θ) может быть вызвано изменением заданного значение yз, возмущающим воздействием, а также изменением одного или нескольких параметров объекта управления k0, T0, uн, uв.
В соответствии с позиционной стратегией оптимальное управление u* в каждый момент времени t ∈ [θ;θ+Δt] формируется как функция текущего значения регулируемой величины yΔ = y(t) и обратного (оставшегося до окончания интервала θ+δt) времени
τ = θ+Δt-t. (5)
Определение синтезирующей функции u*(y,τ) в реальном времени производится следующим образом. По сигналам, соответствующим параметрам объекта управления T0, k0, текущему и заданному значениям регулируемой величины y, yз, интервала управления Δt блоком 14 формируется синтезирующий сигнал
здесь
Δu = uв-uн, yθ = y(θ).
В случае симметричного ограничения на управление, т.е.
uв = |uн|, (7)
синтезирующий сигнал равен
В зависимости от значений сигналов L и
A = -Δt/2To, (9)
поступающих в блок 15, представленный на фиг. 2, возможны восемь видов оптимального управления u*(t), которые приведены на фиг. 3, а области их существования - на фиг. 4. Сначала по значениям L, A определяются вид и параметры нормированного оптимального управления
Для первых четырех видов
здесь
Для других видов управлений расчет параметров производится по формулам




Синтезирующая функция позиционного оптимального нормированного управления имеет следующий вид:
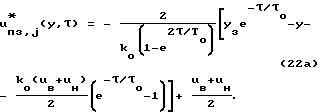
Сигналы нормированного управления преобразуются к реальному по формулам
В случае 
В случае j = 5
В случае j = 6
В случае j = 7
u
и в случае j = 8
u
Когда ограничения на управление симметричны, т.е. uв = |uн| = uгр, тогда формулы (22a) - (22b) существенно упрощаются и имеет место:
в случае 
и в случае j = 5
В случае j = 6
Управление u
Необходимо отметить в случае, когда на временном интервале [θ;θ+Δt] произойдет увеличение разности |y(t)-yз|, t ∈ [θ;θ+Δt] по сравнению с |yθ-yз| на величину больше Δyp, т.е.
|y(t)-y3|-|yθ-yз| > Δyp, (24)
блок 13 вырабатывает сигнал, поступающий на блок 12 для изменения θ и Δt, в свою очередь, по сигналу блока 12 корректируется значение θ и θ+Δt в блоке времени 11.
Таким образом, предлагаемая система управления позволяет уменьшить затраты энергии при устранении рассогласований между заданным и текущем значениями регулируемого параметра, повысить устойчивость процесса регулирования при возможных изменениях параметров объекта, увеличить надежность способа регулирования. Формирование сигнала оптимального управления во втором канале может осуществляться при формировании пропорционального, или пропорционально-интегрального, или пропорционально-интегрально-дифференциального, или релейного сигнала при параллельном соединении первого и второго каналов.
Особо следует отметить, что второй канал заявляемой системы может работать с несколькими первыми каналами любого из указанных типов и таким образом осуществлять регулирование несколькими объектами. При этом объекты могут отличаться по своим параметрам, что приводит к повышению экономической эффективности применения изобретения.
Данную систему управления наиболее целесообразно использовать для управления энергоемкими объектами типа двигателей большой мощности, крупнотоннажными машинами и аппаратами, что обеспечивает экономию энергии при переходных процессах в 2-3 раза. При частых изменениях заданий регулируемой величины и наличии возмущающих воздействий эффективность работы предлагаемой системы повышается.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕПЛОФИЗИЧЕСКИХ ХАРАКТЕРИСТИК СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ МНОГОСЛОЙНЫХ КОНСТРУКЦИЙ БЕЗ НАРУШЕНИЯ ИХ ЦЕЛОСТНОСТИ | 1998 |
|
RU2140070C1 |
| ПОЛУПРОВОДНИКОВЫЙ ДАТЧИК ГАЗОВ | 1997 |
|
RU2114422C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР | 1993 |
|
RU2065131C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ ВЫХОДНОГО ПАРАМЕТРА | 2005 |
|
RU2292575C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЕМКОСТНЫМИ СОСТАВЛЯЮЩИМИ ОБЪЕКТА | 2009 |
|
RU2442206C2 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ОТПУСКА И ПОТРЕБЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В СЕТЯХ ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2193812C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ РАЗВИТОМ МОРСКОМ ВОЛНЕНИИ | 2008 |
|
RU2368536C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ УПРАВЛЕНИЯ | 2012 |
|
RU2486563C1 |
| АНАЛОГО-ЦИФРОВОЕ МНОЖИТЕЛЬНО-ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1997 |
|
RU2121712C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |

Энергосберегающая многофункциональная система автоматического управления относится к области автоматического управления и может быть использована в регуляторах уровня, температуры, концентрации и др. Техническим результатом является повышение точности управления. Сущность изобретения заключается в том, что система содержит объект управления, датчик текущего значения регулируемой величины, блок сравнения, регулирующее устройство, исполнительный механизм и задатчики параметров настройки регулирующего устройства и заданного значения регулируемой величины, задатчик-идентификатор параметров объекта управления, задатчики параметров зависимости для расчета временного интервала и отклонения регулируемой величины от заданного значения, блоки времени, расчета временного интервала управления, выбора режима работы, формирования синтезирующего сигнала, синтеза оптимального управления и переключения управляющего воздействия. 6 ил.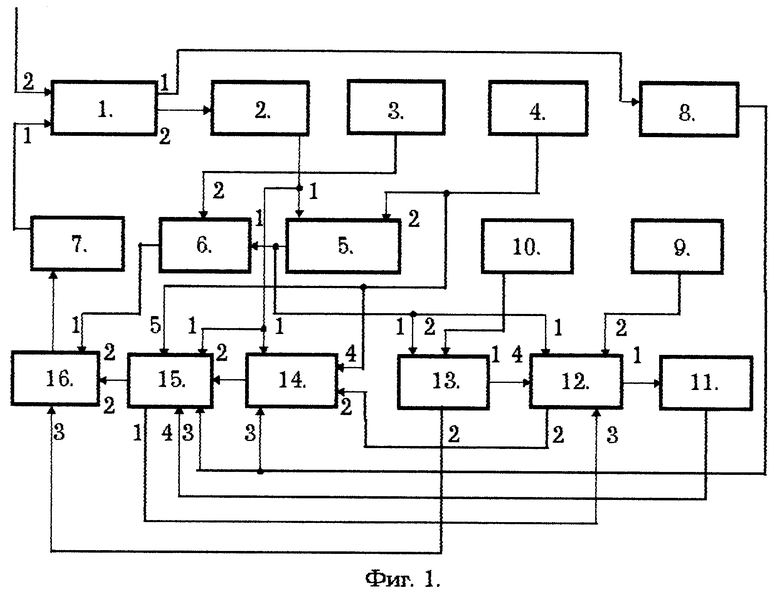
Энергосберегающая многофункциональная система автоматического управления, содержащая последовательно соединенные исполнительный механизм, объект управления, датчик текущего значения регулируемой величины, блок сравнения, регулирующее устройство и задатчик параметров настройки регулирующего устройства, который соединен со вторым входом регулирующего устройства, и задатчик заданного значения регулируемой величины, который соединен со вторым входом блока сравнения, отличающаяся тем, что дополнительно содержит задатчик-идентификатор параметров объекта, задатчик параметров зависимости для расчета временного интервала управления, задатчик отклонения регулируемой величины от заданного значения, определяющего режим работы, блок времени, блок расчета временного интервала управления, блок выбора режима работы, блок формирования синтезирующего сигнала, блок синтеза оптимального управления, блок переключения управляющего воздействия, причем первый выход объекта управления соединен со входом задатчика-идентификатора параметров объекта управления, выход датчика текущего значения регулируемой величины соединен с первыми входами блоков формирования синтезирующего сигнала и синтеза оптимального управления, выход задатчика заданного значения регулируемой величины соединен с четвертым входом блока формирования синтезирующего сигнала и пятым входом блока синтеза оптимального управления, а выход блока сравнения соединен с первыми входами блоков расчета временного интервала управления, выбора режимов работы, выход регулирующего устройства соединен с первым входом блока переключения управляющего воздействия, третий вход которого соединен со вторым выходом блока выбора режима работы, второй вход которого соединен с выходом задатчика отклонения регулируемой величины от заданного значения, а выход - с четвертым входом блока расчета временного интервала управления, второй вход которого соединен с выходом задатчика параметров зависимости для расчета временного интервала управления, третий вход - с первым выходом блока синтеза оптимального управления, первый выход - со входом блока времени, а второй выход - со вторым выходом блока формирования синтезирующего сигнала, выход которого соединен со вторым входом блока синтеза оптимального управления, третий вход которого соединен с третьим входом блока формирования синтезирующего сигнала и выходом задатчика-идентификатора параметров объекта управления, четвертый вход блока синтеза оптимального управления соединен с выходом блока времени, а второй выход блока синтеза оптимального управления соединен со вторым входом блока переключения управляющего воздействия, выход которого соединен со входом исполнительного механизма, а на второй вход объекта управления поступает возмущающее воздействие.
| Способ управления | 1975 |
|
SU805247A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Ротач В.Я | |||
| Расчет настройки промышленных систем регулирования | |||
| - М., 1961, с | |||
| Аппарат для передачи фотографических изображений на расстояние | 1920 |
|
SU170A1 |

