Изобретение относится к области машиностроения, а конкретно к управляемой опоре, которая может быть использована в автоматизированных системах для активного сверхточного позиционирования устройств различного назначения, в том числе установок ионной, электронной, рентгеновской и фотолитографии, координатно-измерительных машин, систем адаптивной оптики, зондовых микроскопов, а также оборудования для механообработки и тому подобное.
Известно управляемое опорное устройство гашения колебаний, содержащее корпус, внутри которого установлен соленоид с расположенным внутри полости соленоида упругим элементом из магнитореологического полимерного материала. В верхней части корпуса установлен шток, взаимодействующий с упругим элементом (CN 101251164 А, МПК F16F 9/30 (2006/01), 2008).
За счет подачи на соленоид напряжения различной силы тока изменяется жесткость упругого элемента, что позволяет при подключении известного устройства к системе управления обеспечить управляемое гашение колебаний. Однако известное устройство не обладает достаточной нагрузочной способностью из-за малой площади попеченного сечения упругого элемента, что обуславливает недостаточные по величине усилия воздействия для стабилизации положения объекта.
Технический результат, обеспечиваемый настоящим изобретением, заключается в решении управляемой опорой, построенной с использованием упругого элемента из магнитореологического материала и обладающей достаточной нагрузочной способностью и высоким быстродействием, задачи активного позиционирования с точностью 0,1-50 нм в автоматическом режиме в противофазе внешним возмущающим колебаниям с минимальным временем переходных процессов с обеспечением возможности перемещения объекта в заданном направлении, активного демпфирования, регулировки и стабилизации ускорения объекта.
Достижение технического результата обеспечивает управляемая опора, содержащая основание и опорную часть, между которыми расположен соленоид с сердечником внутри, охватывающий соленоид упругий элемент из магнитореологического материала, контактирующий с противоположных сторон с обращенными навстречу друг другу поверхностями основания и опорной части, а также дополнительный упругий элемент из магнитореологического материала, установленный с сопряжением с опорной частью и с контактом с обращенной к опорной части поверхностью сердечника.
Дополнительный упругий элемент может быть установлен в отверстии опорной части, при этом основание, опорная часть и сердечник соленоида изготавливаются из магнитного материала.
Либо, для повышения быстродействия, дополнительный упругий элемент устанавливается с контактом с поверхностью опорной части, обращенной к основанию, и боковой поверхностью с внутренней боковой поверхностью основного упругого элемента. При этом основание и сердечник соленоида изготавливаются из магнитного материала, а опорная часть - из немагнитного материала.
В предпочтительном варианте выполнения упругой опоры основание и опорная часть поджаты в направлении друг к другу связывающими упругими элементами.
В наилучшем варианте выполнения изобретения упругая опора снабжена ограничивающими втулками, одна из которых охватывает основной упругий элемент снаружи, а вторая установлена между основным упругим элементом и соленоидом. Ограничивающие втулки обеспечивают радиальную жесткость основного упругого элемента и их предпочтительно изготавливать из немагнитного материала с малым трением скольжения, например - из фторопласта.
Возможность осуществления изобретения иллюстрируется примерами конкретного выполнения управляемой опоры.
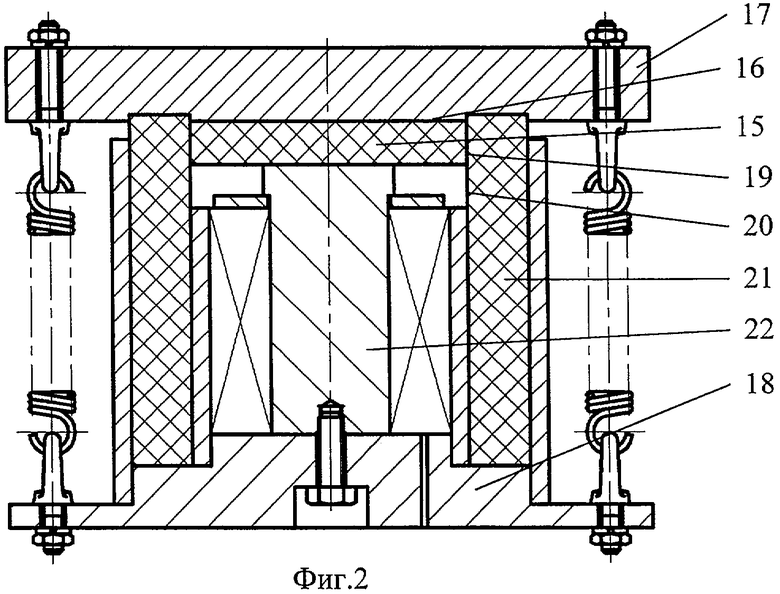
На фиг.1 показана управляемая опора, продольный разрез, содержащая основание 1 и опорную часть 2, между которыми расположен соленоид 3 с сердечником 4 внутри.
Соленоид 3 охватывает упругий элемент 5, изготовленный из магнитореологического материала и имеющий форму цилиндрического отрезка трубы, контактирующий с противоположных сторон с обращенными навстречу друг другу поверхностями 6 и 7 соответственно основания 1 и опорной части 2, которые поджаты в направлении друг к другу связывающими упругими элементами 8 в виде витых пружин, сопротивляющихся растяжению.
Упругий элемент 5 снаружи охватывает ограничивающая втулка 9, а между упругим элементом 5 и соленоидом 3 установлена вторая ограничивающая втулка 10.
В выполненном в опорной части 1 отверстии 11 и с контактом с обращенной к опорной части 1 поверхностью 12 сердечника 4 установлен дополнительный упругий элемент 13 из магнитореологического материала.
Объект, положение которого необходимо стабилизировать, обеспечив виброизоляцию от внешних возмущающих воздействий, монтируется на опорной части 2.
На соленоид 3 подается электрический ток определенной величины, вследствие чего в магнитопроводе, состоящем из сердечника 4, опорной части 1, основного упругого элемента 5, опорной части 2 и дополнительного упругого элемента 13, возникает замкнутое магнитное поле.
При этом в основном упругом элементе 5 формируется преимущественно осевое магнитное поле. Заключенные в упругую матрицу магнитные частицы упругого элемента 5 ориентируются вдоль линий магнитного поля, смещаются в направлении наибольшей индукции, изменяя геометрические размеры упругого элемента 5, его модуль упругости и вязкость, в результате чего опорная часть 2 перемещается по вертикальной оси. За счет регулирования величины электрического тока, которое обеспечивает автоматическая система, происходит эффективное гашение колебаний от внешних возмущающих воздействий.
Ограничивающие втулки 9 и 10, изготовленные из немагнитного материала с малым трением скольжения, обеспечивают радиальную жесткость основного упругого элемента 5. Связывающие упругие элементы 8 в виде витых пружин обеспечивают прижим элементов магнитопровода, то есть сердечника 4, опорной части 1, основного упругого элемента 5, опорной части 2 и дополнительного упругого элемента 13, друг к другу в продольном направлении и устраняют люфты между ними.
Дополнительный упругий элемент 13 работает аналогично основному упругому элементу 5 в согласованном с ним режиме, позволяя увеличить нагрузочную способность управляемой опоры, поскольку в сравнении с основным упругим элементом имеет меньшую длину на свободных участках боковой поверхности 14.
На фиг.2 показана управляемая опора, продольный разрез, у которой в отличие от описанного выше варианта осуществления изобретения дополнительный упругий элемент 15 установлен с контактом с поверхностью 16 опорной части 17, обращенной к основанию 18 и боковой поверхностью 19 с внутренней боковой поверхностью 20 основного упругого элемента 21.
В этом варианте выполнения управляемая опора обладает большим быстродействием регулировки перемещений, поскольку исключается намагничивание опорной части 2, что позволяет уменьшить время переходных процессов при изменении магнитного потока в магнитопроводе, включающем сердечник 22, основание 18, основной 21 и дополнительные 15 упругие элементы.
Управляемая опора изготавливается по известным технологиям, которые выбираются с учетом конкретных материалов, используемых для изготовления деталей, их конфигурации. Конкретные магнитомягкие и полимерные материалы, с использованием которых получают упругие магнитореологические материалы, также хорошо известны специалистам, как и технологии их получения.
Выполненная в соответствии с настоящим изобретением управляемая опора может быть использована в различном сверхпрецизионном технологическом и исследовательском оборудовании, к которому предъявляются жесткие требования к системам перемещения и виброизоляции. К такому оборудованию можно отнести сканирующие зондовые микроскопы с погрешностью позиционирования зонда относительно образца на атомарном уровне (менее 0,1 нм), оборудование для микролитографии, в частности для рентгенолитографии, в которой точность совмещения подложки с рентгеношаблоном составляет около 20 нм, установки для юстировки оптоволоконных устройств, где требуется обеспечить юстировочное перемещение оптоволокна относительно источника излучения, например линзового лазера, по трем координатам с точностью порядка 20 нм. К оборудованию, в котором используются системы микро-, наноперемещений и виброизоляции, можно отнести сверхбольшие адаптивные телескопы. Кроме высокой точности юстировки и виброизоляции перечисленные объекты требуют от управляемых опор высокой нагрузочной способности до 1000 Н и быстродействия на уровне 20-200 мс, что способна обеспечить выполненная в соответствии с изобретением управляемая опора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активная виброизолирующая платформа на основе магнитореологических эластомеров | 2015 |
|
RU2611691C1 |
| АКТИВНАЯ ОПОРА | 2009 |
|
RU2404381C1 |
| МАГНИТНЫЙ ДЕМПФЕР | 2024 |
|
RU2826670C1 |
| МАГНИТОЭЛАСТИЧНЫЙ УПРАВЛЯЕМЫЙ ДЕМПФЕР | 2018 |
|
RU2698595C1 |
| Подвеска сиденья транспортного средства с активной системой изменения жёсткости на основе магнитоактивных эластомеров | 2016 |
|
RU2708797C2 |
| МАГНИТОРЕОЛОГИЧЕСКАЯ ПОЗИЦИОНИРУЮЩАЯ И ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2010 |
|
RU2443911C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАСХОДА ЖИДКОЙ СРЕДЫ И МАГНИТОРЕОЛОГИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2343533C1 |
| СИСТЕМА ВИБРОИЗОЛЯЦИИ | 2019 |
|
RU2727918C1 |
| Магнитореологический амортизатор | 2015 |
|
RU2645484C2 |
| УПРАВЛЯЕМОЕ УСТРОЙСТВО ГАШЕНИЯ КОЛЕБАНИЙ | 2009 |
|
RU2411404C1 |
Изобретение относится к машиностроению. Опора содержит соленоид 3 с сердечником 4 внутри, расположенный между основанием 1 и опорной частью 2. Соленоид 3 охватывает упругий элемент 5 из магнитореологического материала. Упругий элемент 5 контактирует с поверхностями 6 и 7 основания 1 и опорной части 2. Дополнительный упругий элемент 13 из магнитореологического материала установлен с сопряжением с опорной частью 1 и контактирует с поверхностью 12 сердечника 4. Достигается повышение нагрузочной способности и быстродействия управляемой опоры. 6 з.п. ф-лы, 2 ил.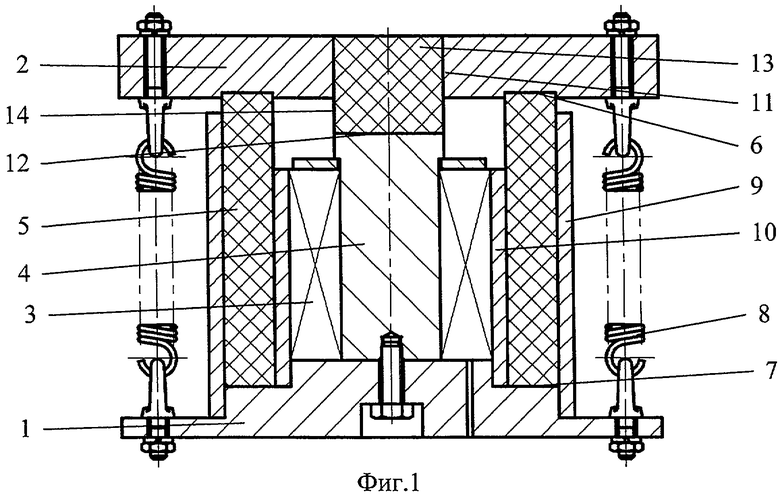
1. Управляемая опора, содержащая основание и опорную часть, между которыми расположен соленоид с сердечником внутри, охватывающий соленоид упругий элемент из магнитореологического материала, контактирующий с противоположных сторон с обращенными навстречу друг другу поверхностями основания и опорной части, а также дополнительный упругий элемент из магнитореологического материала, установленный с сопряжением с опорной частью и с контактом с обращенной к опорной части поверхностью сердечника.
2. Опора по п.1, отличающаяся тем, что дополнительный упругий элемент установлен в отверстии опорной части, при этом основание, опорная часть и сердечник соленоида изготовлены из магнитного материала.
3. Опора по п.1, отличающаяся тем, что дополнительный упругий элемент установлен с контактом с поверхностью опорной части, обращенной к основанию, а боковой поверхностью дополнительный упругий элемент контактирует с внутренней боковой поверхностью основного упругого элемента, при этом основание и сердечник соленоида изготовлены из магнитного материала, а опорная часть - из немагнитного материала.
4. Опора по п.1, отличающаяся тем, что основание и опорная часть поджаты в направлении друг к другу связывающими упругими элементами.
5. Опора по п.1, отличающаяся тем, что она снабжена ограничивающими втулками, одна из которых охватывает основной упругий элемент снаружи, а вторая установлена между основным упругим элементом и соленоидом.
6. Опора по п.5, отличающаяся тем, что ограничивающие втулки изготовлены из немагнитного материала с малым трением скольжения.
7. Опора по п.5, отличающаяся тем, что ограничивающие втулки изготовлены из фторопласта.
| CN 101251164 А, 27.08.2008 | |||
| ЕР 0784163 A1, 16.07.1997 | |||
| Управляемое устройство для гашения колебаний | 1990 |
|
SU1737184A1 |

