Изобретение относится к области машиностроения, а конкретно к активной опоре, которая может быть использована в автоматизированных системах для активного сверхточного позиционирования устройств различного назначения, в том числе установок ионной, электронной, рентгеновской и фотолитографии, координатно-измерительных машин, систем адаптивной оптики, зондовых микроскопов, а также оборудования для механообработки и тому подобное.
Известно управляемое опорное устройство, содержащее корпус, внутри которого установлен соленоид с расположенным внутри полости соленоида упругим элементом из магнитореологического упругого материала. В верхней части корпуса установлен шток, взаимодействующий с упругим элементом (CN 101251164 A, МПК F16F 9/30 (2006/01), 2008).
За счет подачи на соленоид напряжения различной силы тока изменяется жесткость упругого элемента, что позволяет при подключении известного устройства к системе управления обеспечить управляемое гашение колебаний. Однако известное устройство не обладает достаточной нагрузочной способностью из-за малой площади попеченного сечения упругого элемента, что обуславливает недостаточные по величине усилия воздействия для стабилизации положения объекта.
Технический результат, обеспечиваемый настоящим изобретением, заключается в решении управляемой опорой, построенной с использованием упругого элемента из магнитореологического материала и обладающей достаточной нагрузочной способностью и высоким быстродействием, задачи активного позиционирования с точностью 0,1-50 нм в автоматическом режиме в противофазе внешним возмущающим колебаниям с минимальным временем переходных процессов с обеспечением активного демпфирования, регулировки и стабилизации ускорения объекта, а также возможности перемещения объекта в заданном направлении с увеличенным диапазоном значений, которые могут достигать 10 и более миллиметров.
Достижение технического результата обеспечивает активная опора, содержащая полый корпус и основание, соленоид, расположенный в полости корпуса, сердечник, расположенный в полости соленоида с сопряжением с основанием, а также мембрану из упругого магнитореологического материала, закрепленную по периметру на корпусе с расположением внутренней поверхности с зазором относительно сердечника. Корпус, основание и сердечник изготавливаются из магнитного материала.
В наилучшем варианте осуществления изобретения мембрана выполняется с жесткой частью, расположенной смежно зазору между мембраной и сердечником.
Предпочтительно, когда жесткая часть мембраны выполнена в виде опорной детали, расположенной на наружной поверхности мембраны, которую предпочтительно изготавливать из немагнитного материала. При этом жесткая часть мембраны может быть снабжена усиливающей деталью, расположенной на внутренней поверхности мембраны и связанной жестко с опорной деталью.
В наилучшем варианте выполнения активная опора выполняется с узлом угловой стабилизации жесткой части мембраны. Конструктивно этот вариант выполнения может быть реализован при выполнении жесткой части мембраны с усиливающей деталью, располагающейся на внутренней поверхности мембраны и связанной жестко с опорной деталью. При этом соленоид располагается в полости корпуса на расстоянии относительно внутренней боковой поверхности корпуса, а узел угловой стабилизации жесткой части мембраны выполняется в виде направляющего цилиндра, закрепленного на усиливающей детали, расположенного между соленоидом и внутренней боковой поверхностью корпуса, а также связанного с корпусом, по меньшей мере, одним кольцевым направляющим элементом, расположенным между наружной поверхностью направляющего цилиндра и внутренней поверхностью корпуса. Кольцевой направляющий элемент может быть выполнен в виде кольца из упругого материала прямоугольного поперечного сечения.
Для увеличения величины перемещения усиливающая деталь жесткой части мембраны может быть выполнена с постоянной осевой намагниченностью.
Возможность осуществления изобретения иллюстрируется примерами конкретного выполнения активной опоры.
На фиг.1 показана активная опора (продольный разрез), которая содержит полый цилиндрический корпус 1 и основание 2, соленоид 3, расположенный в полости 4 корпуса 1, сердечник 5, расположенный в полости соленоида 3 с сопряжением с основанием 2, а также мембрану 6 из упругого магнитореологического материала, закрепленную по периметру на корпусе 1 с расположением внутренней поверхности 7 с зазором 8 относительно сердечника 5. Мембрана 6 выполнена с расположенной смежно зазору 8 жесткой частью в виде опорной детали 9, расположенной на наружной поверхности 10 мембраны 6. Корпус 1, основание 2 и сердечник 5 изготовлены из магнитного материала и образуют с мембраной 6 замкнутый магнитопровод.
При подаче управляющего тока на соленоид 3 возникает замкнутое магнитное поле. В мембране 6 формируется радиальное магнитное поле с индукцией, величина которой имеет максимум вблизи сердечника 5. Под действием этой магнитной индукции мембрана 6 перемещается в осевом направлении в пределах зазора 8. За счет регулирования величины электрического тока происходит эффективное гашение колебаний от внешних возмущающих воздействий.
Как правило, активная опора работает при помощи замкнутой системы управления (схемой не иллюстрируется), состоящей из датчика перемещения, управляющего компьютера и блока питания. Сигнал от датчика перемещения поступает в компьютер и обрабатывается по программе, определяющей параметры электрического тока, который подается на соленоид. При этом перемещение опорной детали 9 можно регулировать по определенному закону, обеспечивая эффективное гашение колебаний.
При подаче управляющего электрического тока на соленоид 3 мембрана 6 деформируется, принимая в центре сферическую форму, выдвигая по оси опорную деталь 9. При снятии сигнала мембрана 6 начинает восстанавливать свою плоскую форму.
Относительная деформация мембраны 6 может быть описана уравнением:
ε=ε0·e-t/θ,
где
ε0 - начальная относительная деформация;
t - время;
θ=η/E - временной параметр при восстановлении формы;
E - модуль упругости материала;
η - вязкость материала.
Уравнение показывает, что при стремлении времени t к бесконечности деформация 8 стремится к 0, то есть форма мембраны 6 полностью восстанавливается. При времени t, намного меньшем θ, отношение t/τ стремится к 0, и тогда относительная деформация 8 стремится к начальной деформации ε0, то есть форма не успевает восстановиться, и начальная деформация сохраняется примерно на одном уровне в течение всего процесса.
Из уравнения видно, что быстродействие активной опоры определяется временем переходных процессов в мембране из магнитореологического материала. Время восстановления формы определяется отношением η/E. Эти параметры, а также значения времени могут регулироваться за счет изменения уровня индукции магнитного поля путем изменения силы тока в катушке.
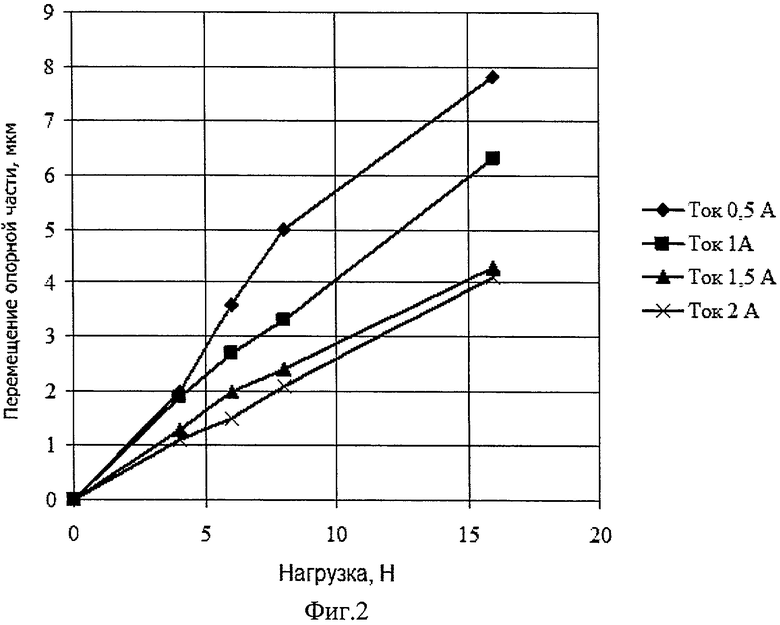
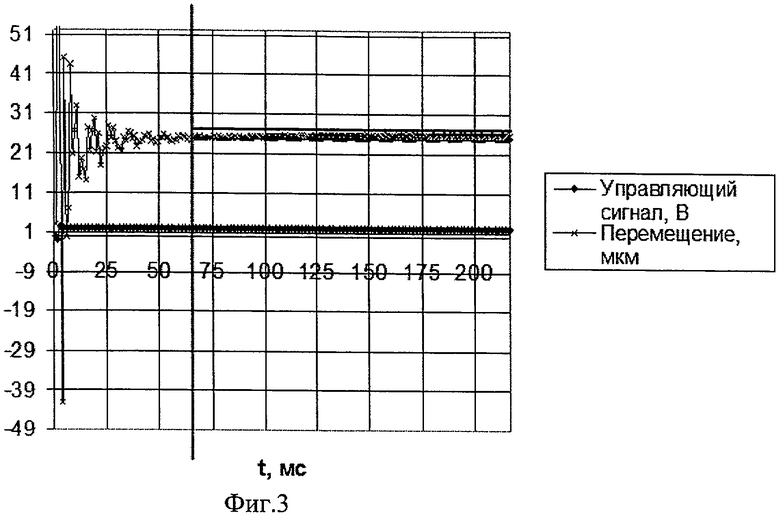
На фиг.2 представлены полученные экспериментально графики изменения жесткости упругих магнитореологических материалов при действии управляющего тока разной величины. При изменении тока также происходит изменение модуля упругости магнитореологического материала. На фиг.3 представлен график переходного процесса при перемещении опорной детали 9, иллюстрирующий время стабилизации мембраны 6 в новом положении после подачи управляющего импульса, где Δt - время переходного процесса. Таким образом, виброизолирующие системы на основе упругих элементов из магнитореологического материала могут в полной мере осуществлять адаптивное управление вязко-упругими свойствами для реализации активного демпфирования.
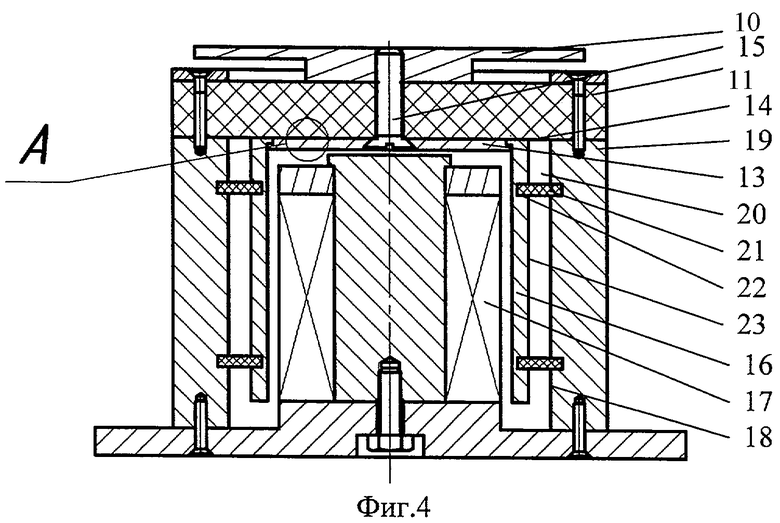
На фиг.4 показан продольный разрез варианта конструктивной реализации активной опоры, предусматривающего выполнение мембраны 11 с жесткой частью, включающей в дополнение к изготовленной из немагнитного материала опорной детали 12 увеличенной опорной площади усиливающую деталь 13, расположенную на внутренней поверхности 14 мембраны 11 и связанную жестко с опорной деталью 12 винтом 15, проходящим через мембрану 11.
Этот вариант предусматривает наличие узла угловой стабилизации жесткой части мембраны 11, исключающий угловые отклонения опорной детали 12. Указанный узел угловой стабилизации жесткой части мембраны 11 включает направляющий цилиндр 16, расположенный между соленоидом 17 и внутренней боковой поверхностью 18 корпуса 19. Именно с целью расположения направляющего цилиндра 16 соленоид 17 располагается в полости 20 корпуса 19 на расстоянии относительно внутренней боковой поверхности 18 корпуса 19.
Направляющий цилиндр 16 связан с корпусом 19 двумя кольцевыми направляющими элементами 21 в виде колец из упругого материала прямоугольного поперечного сечения, расположенными в пазах 22 между наружной поверхностью 23 направляющего цилиндра 16 и внутренней поверхностью 18 корпуса 19.
Активная опора в этом варианте выполнения изобретения работает аналогично описанной выше, но перемещение опорной детали 12 осуществляется без угловых отклонений, поскольку кольцевые направляющие элементы 21 в пределах упругих деформаций задают линейную траекторию движения мембраны 11 с опорной деталью 12.
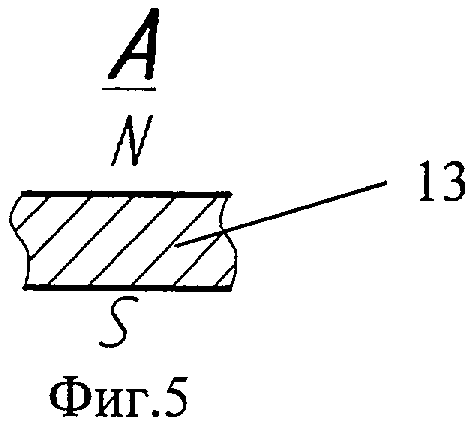
Кроме того, в этом варианте осуществления изобретения с целью увеличения величины перемещения опорной детали 12 фактически в два раза усиливающая деталь 13 может быть выполнена с постоянной осевой намагниченностью, как это проиллюстрировано на фиг.5, где изображен увеличено обозначенный на фиг.4 фрагмент А усиливающей детали 13. При таком выполнении усиливающей детали 13 происходит взаимодействие магнитных полей соленоида 17 и постоянно намагниченной усиливающей детали 13. При изменении полярности управляющего тока мембрана 11 линейно перемещается в обратном направлении.
Выполненная в соответствии с настоящим изобретением активная опора изготавливается по известным технологиям, которые выбираются с учетом конкретных материалов, используемых для изготовления деталей, их конфигурации. Конкретные магнитомягкие и полимерные материалы матрицы, с использованием которых получают упругие магнитореологические материалы, также хорошо известны специалистам, как и технологии их получения.
Выполненная в соответствии с настоящим изобретением активная опора может быть использована в различном сверхпрецизионном технологическом и исследовательском оборудовании, к которому предъявляются очень жесткие требования к системам перемещения и виброизоляции. К такому оборудованию можно отнести сканирующие зондовые микроскопы с погрешностью позиционирования зонда относительно образца на атомарном уровне (менее 0,1 нм), оборудование для микролитографии, в частности для рентгенолитографии, в которой точность совмещения подложки с рентгеношаблоном составляет около 20 нм, установки для юстировки оптоволоконных устройств, где требуется обеспечить юстировочное перемещение оптоволокна относительно источника излучения, например линзового лазера, по трем координатам с точностью порядка 20 нм. К оборудованию, в котором используются системы микро-, наноперемещений и виброизоляции, можно отнести сверхбольшие адаптивные телескопы. Кроме высокой точности юстировки и виброизоляции перечисленные объекты требуют от управляемых опор высокой нагрузочной способности до 1000 H и быстродействия на уровне 20-200 мс, что способна обеспечить выполненная в соответствии с изобретением управляемая опора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активная виброизолирующая платформа на основе магнитореологических эластомеров | 2015 |
|
RU2611691C1 |
| МАГНИТОЭЛАСТИЧНЫЙ УПРАВЛЯЕМЫЙ ДЕМПФЕР | 2018 |
|
RU2698595C1 |
| УПРАВЛЯЕМАЯ ОПОРА | 2009 |
|
RU2404380C1 |
| УПРАВЛЯЕМОЕ УСТРОЙСТВО ГАШЕНИЯ КОЛЕБАНИЙ | 2009 |
|
RU2411404C1 |
| МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 2014 |
|
RU2561610C1 |
| Магнитореологический амортизатор | 2015 |
|
RU2645484C2 |
| МАГНИТНЫЙ ДЕМПФЕР | 2024 |
|
RU2826670C1 |
| МАГНИТОУПРАВЛЯЕМАЯ ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2018 |
|
RU2695472C1 |
| МАГНИТОРЕОЛОГИЧЕСКАЯ ПОЗИЦИОНИРУЮЩАЯ И ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2010 |
|
RU2443911C1 |
| МАГНИТОУПРАВЛЯЕМАЯ ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА И СПОСОБ НАСТРОЙКИ ОПТИМАЛЬНОГО РЕЖИМА ЕЁ РАБОТЫ | 2020 |
|
RU2744257C1 |
Изобретение относится к машиностроению. Опора содержит корпус 1, в полости которого расположен соленоид 3. Внутри соленоида 3 размещен сердечник 5, сопряженный с основанием 2. Мембрана 6 из упругого магнитореологического материала закреплена по периметру на корпусе 1. Внутренняя поверхность 7 мембраны 6 расположена с зазором 8 относительно сердечника 5. Корпус 1, основание 2 и сердечник 5 выполнены из магнитного материала. Достигается повышение нагрузочной способности и быстродействия опоры, а также возможность перемещения объекта в заданном направлении с увеличенным диапазоном значений. 8 з.п. ф-лы, 5 ил.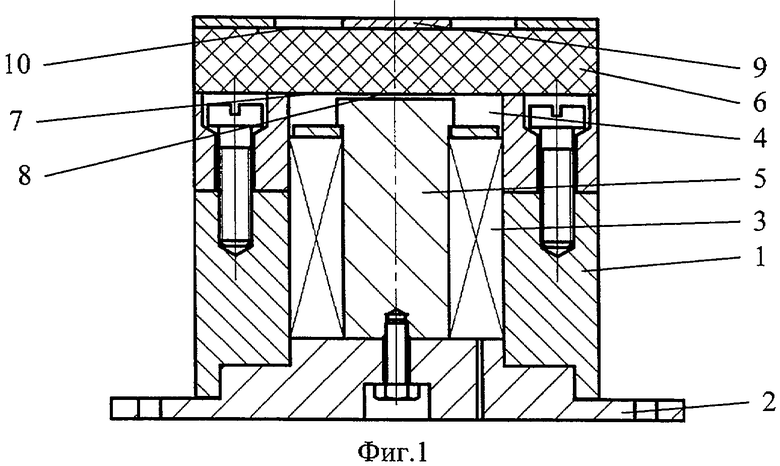
1. Активная опора, содержащая полый корпус и основание, соленоид, расположенный в полости корпуса, сердечник, расположенный в полости соленоида и сопряженный с основанием, а также мембрану из упругого магнитореологического материала, закрепленную по периметру на корпусе с расположением внутренней поверхности с зазором относительно сердечника, при этом корпус, основание и сердечник выполнены из магнитного материала.
2. Опора по п.1, отличающаяся тем, что мембрана выполнена с жесткой частью, расположенной смежно зазору между мембраной и сердечником.
3. Опора по п.2, отличающаяся тем, что жесткая часть мембраны выполнена в виде опорной детали, расположенной на наружной поверхности мембраны.
4. Опора по п.3, отличающаяся тем, что жесткая часть мембраны снабжена усиливающей деталью, расположенной на внутренней поверхности мембраны и связанной жестко с опорной деталью.
5. Опора по п.3, отличающаяся тем, что опорная деталь выполнена из немагнитного материала.
6. Опора по п.3, отличающаяся тем, что она снабжена узлом угловой стабилизации жесткой части мембраны.
7. Опора по п.6, отличающаяся тем, что жесткая часть мембраны снабжена усиливающей деталью, расположенной на внутренней поверхности мембраны и связанной жестко с опорной деталью, при этом соленоид расположен в полости корпуса на расстоянии относительно внутренней боковой поверхности корпуса, а узел возвратно-поступательного перемещения жесткой части мембраны выполнен в виде направляющего цилиндра, закрепленного на усиливающей детали, расположенного между соленоидом и внутренней боковой поверхностью корпуса, а также связанного с корпусом по меньшей мере одним кольцевым направляющим элементом, расположенным между наружной поверхностью направляющего цилиндра и внутренней поверхностью корпуса.
8. Опора по п.7, отличающаяся тем, что кольцевой направляющий элемент выполнен в виде кольца из упругого материала прямоугольного поперечного сечения.
9. Опора по п.4, отличающаяся тем, что усиливающая деталь выполнена с постоянной осевой намагниченностью.
| CN 101251164 А, 27.08.2008 | |||
| ВЫТЯЖНОЙ ПРИБОР ТЕКСТИЛЬНОЙ МАШИНЫ | 1991 |
|
RU2028392C1 |
| Управляемое устройство для гашения колебаний | 1990 |
|
SU1737184A1 |

