0
Фиг. 1
Изобретение относится к демпфированию ударных воздействий объектов большой массы.
Известно устройство для демпфирования ударных воздействий от испытуемых объектов о наковальню с упругой подвеской, где характеристики ударного импульса меняют за счет начальной скорости соударения, изменения соотношения масс ударной платформы с закрепленным объектом и наковальни и их абсолютных значений.
Недостатком устройства является то, что его наладка производится до начала испытаний и изменение его виброгасящих характеристик в течение колебательного процесса невозможно.
Известно также устройство для гашения колебаний, обеспечивающее наложение дополнительной связи, которая изменяет упругость, массу или число степеней свободы приемной системы в процессе колебаний.
Недостатком является то, что устройство не обеспечивает сохранности объекта ис- пытаний, так как не защищает его от соударения с приемной системой, не исключает сосредоточенных нагрузок на опорную поверхность и не снижает их величины. Кроме того, изменение амплитудно-частотных характеристик его приемной системы происходит дискретно.
Цель изобретения - повышение эффективности за счет снижения сейсмичности при сбросе испытуемого объекта.
Поставленная цель достигается тем, что в управляемом устройстве для гашения колебаний, содержащем платформу, упругие элементы и систему управления, включающую датчик, связываемый с перемещающимся объектом и исполнительным органом, обеспечивающим изменение массы упругих элементов, последние разделены платформой, один из них выполнен в виде резервуара, заполненного упруговяз- ким наполнителем, и соединен с исполнительным органом, а другой - в виде мягких проточных оболочек, заполненных воздухом, связываемых с источником сжатого воздуха посредством регулятора расхода воздуха и прижимаемых к опорной поверхности посредством регулируемой по длине тяги, соединенной с опорной поверхностью посредством замка, связанного с исполнительным органом и регулятором расхода воздуха датчиком, представляющим собой блок переналаживаемых реле времени.
Исполнительный орган выполнен в виде расположенных по обе стороны от резервуара цилиндров разделенных
соединенными с одним приводом поршнями на полости, из которых обращенные к резервуару заполнены жидкостью и связаны с гидроаккумулятором.
На фиг.1 представлено устройство для
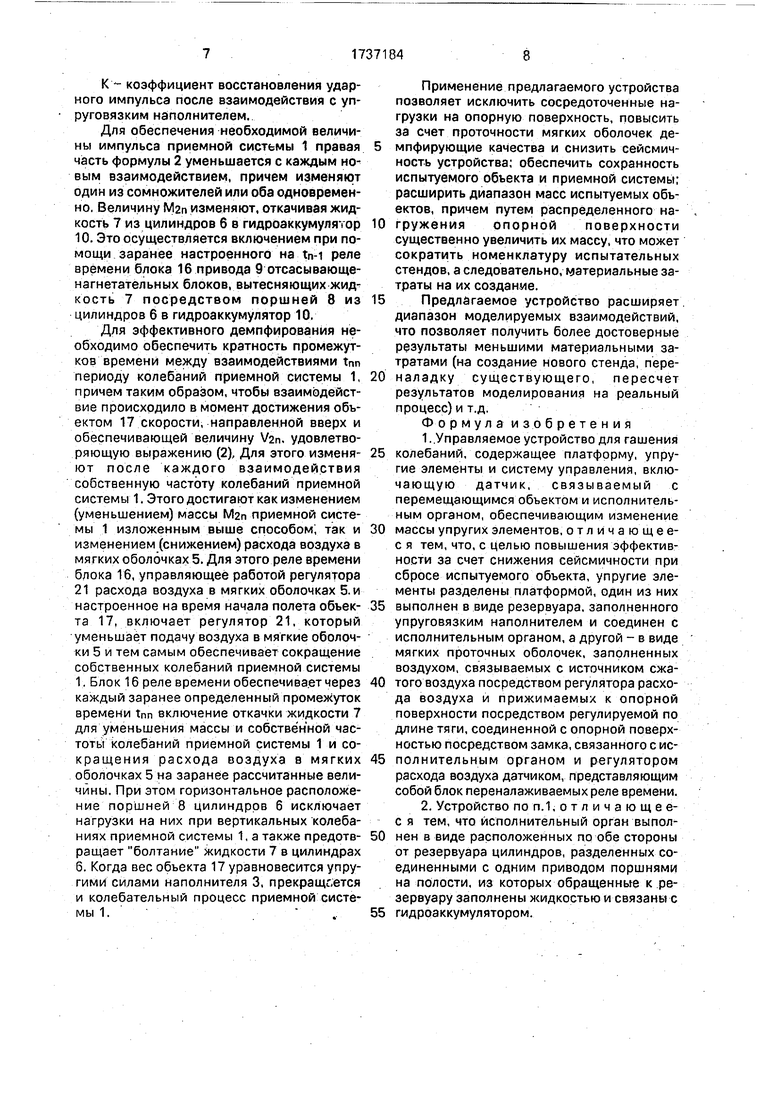
демпфирования ударных воздействий при взаимодействии испытуемого объекта с платформой (условно показаны следующие линии связи: электрическая - штрихпунк0 тирной, гидравлическая -основной одинарной, пневматическая - основной двойной); на фиг.2 - график изменения во времени перемещения испытуемого, объекта (штриховая линия) и приемной системы (сплош5 ная линия).
Управляемое устройство для гашения содержит приемную систему 1, состоящую из резервуара 2, заполненного упруговяз- ким наполнителем 3 (например, пенополиу0 ретаном), и платформы 4 с закрепленным на ней упругим элементом в виде мягких про- точньТх оболочек 5, заполняемых воздухом, а платформа 4 разделяет упругие элементы: резервуар 2 с наполнителем 3 и мягкие обо5 лочки 5. Резервуар 2 соединен с исполнительным органом, обеспечивающим изменение массы приемной системы, который выполнен в виде цилиндров 6, расположенных по обе стороны резервуара 2 и
0 наполненных жидкостью 7. Цилиндры б разделены поршнями 8, соединенными с одним общим приводом 9 (например, пневматическим), на полости, из которых жидкостью 7 наполнены обращенные к резервуару 2. Эти
5 же полости связаны с гидроаккумулятором 10, который может быть выполнен аналогично цилиндрам 6.
Кроме того, приемная система снабжена тягой 11 регулируемой длины с замком
0 12, соединяющей платформу 4 с опорной поверхностью 13. Сила притягивания платформы 4 контролируется динамометром 14, который установлен на тяге 11.
Исполнительный орган, состоящий из
5 цилиндров 6, привода 9 и гидроаккумулятора 10, и замок 12 связаны с системой 15 управления сбросом испытуемого объекта. Система включает в себя датчик, представляющий собой блок 16 переналаживаемых
0 реле времени, реагирующих на отсоединение испытуемого объекта 17 от узла 18 подвеса подъемного механизма (на фиг.1 подъемный механизм не показан). Отсоединение испытуемого объекта фиксируется
5 при размыкании замка 19, который связан с блоком 16.
Блок 16 связан с замком 12 тяги 11, исполнительным органом, осуществляющим изменение массы приемной системы, и источником 20 сжатого воздуха. Связь с послед ним осуществляется через регулятор 21 расхода воздуха, управляющий поступлением воздуха в мягкие проточные оболочки 5.
Регулятор 21 и привод 9 выполнены как система отсасывающе-нагнетающих блоков и снабжены индивидуальным реле времени, входящим в блок 16. Для согласования работы элементов общего привода 9 от источника 20 сжатого воздуха может быть установлен стабилизатор 22 давления.
Устройство работает следующим образом.
Перед началом работы производят следующие действия.
Приемную систему 1, состоящую из ре- зервуара 2 с наполнителем 3, размещенного на платформе 4 с упругими элементами в виде мягких проточных оболочек, с помощью последних устанавливают под системой 15 сброса, где на узле 18 подвеса через замок 19 закреплен испытуемый объект 17.
Перемещение приемной системы на мягких проточных оболочках происходит следующим образом. От источника 20 подают сжатый воздух в полости, ограниченные мягкими оболочками 5. Оболочки раздуваются, приподнимая систему над опорной поверхностью 13 и ограничивая Зону повы- шейного давления. При этом, поскольку оболочки проточные, избыток сжатого воздуха из зоны повышенного давления истекает в атмосферу, образуя зазор между раздутыми оболочками 5 и опорной поверх- ностью 13. Истечение воздуха в этот зазор обеспечивает низкой коэффициент трения при перемещении приемной системы в нужном направлении.
После установки приемной системы 1 под системой 15 сброса платформу 4 прикрепляют к опорной поверхности 13 при помощи замка 12. Увеличивают подачу воздуха от источника 20 к платформе 4, При этом мягкие оболочки 5 платформы 4 разду- ваются и стремятся приподнять последнюю над опорной поверхностью 13, чему препятствует тяга 11. Одновременно наполняют жидкостью 7 цилиндры 6. Жидкость 7 отбирают из гидроаккумулятора 10 при гЮмощи горизонтально расположенных поршней б, приводимых в движение единым пневматическим приводом 9, выполненным как отса- сывающе-нагнетающий блок. Силу притягивания платформы 4 контролируют динамометром 14. Величину этой силы регулируют давлением и расходом воздуха от источника 20, а также изменением длины тяги 11 (например, при помощи винтового механизма). Система готова к работе.
К началу работы устройства производят расчет колебательного процесса объекта относительно платформы 4. При известных высоте сброса объекта 17 и коэффициенте восстановления импульса упруговязким наполнителем 3 определяют скорости и импульсы при соударении, а также промежутки времени между взаимодействиями (на фиг.2 tni, tna- tnn...). После этого осуществляют подбор параметров приемной системы 1. При максимальной массе платформы 4 (цилиндры 6 наполнены жидкостью 7) о предел я ют усилие притягивания платформы 4 к опорной поверхности 13 для обеспечения соотношения
MlVl M2V2,(1)
где Mi.Ma - массы соответственно сбрасываемого объекта 17 и приемной системы 1, состоящей из массы резервуара 2 с наполнителем 3, массы жидкости 7 в цилиндрах 6 и массы платформы 4;
Vi,V2 - скорости в момент соударения соответственно сбрасываемого объекта 17 и приемной системы 1.
Для выполнения условия (1) при первом соударении требуемое соотношение скоростей Vi и V2 достигается величиной силы предварительного натяжения тяги 11 и временным согласованием размыкания замков 12 и 19 По характеристикам платформы 4 с мягкими проточными оболочками 5 и определенной из соотношения (1) потребной скорости приемной системы 1 в момент соударения можно определить время всплытия tucnn 2 до соударения при любом начальном давлении в мягких оболочках 5 платформы 4 Если известны tpi и tP2 время размыкания замков 19 и 12, можно согласованием времени выдержки до включения замков 1ы - tb2 . где tbi - время выдержки замка 19. a tba замка 12. и соответствующей настройкой соответствующего реле времени блока 16 включения замков обеспечить условие (1) при первом взаимодействии.
Если в качестве наполнителя 3 используется упруговязкий материал, например пенополиуретан, после взаимодействия объект 17 подбрасывается, но уже на меньшую высоту, что определяет время его свободного полета tn2 и величину непогашенного импульса К MiVn MiVi2, где Vi2 - скорость объекта 17 при втором соударении.
Таким образом, для каждого последующего соударения выражение (1) приобретает вид
Kn-1MiVi-M2nV2n где п - номер соударения;
(2)
К - коэффициент восстановления ударного импульса после взаимодействия с уп- руговязким наполнителем.
Для обеспечения необходимой величины импульса приемной системы 1 правая часть формулы 2 уменьшается с каждым новым взаимодействием, причем изменяют один из сомножителей или оба одновременно. Величину М2п изменяют, откачивая жидкость 7 из цилиндров б в гидроаккумулятор 10. Это осуществляется включением при помощи заранее настроенного на tn-1 реле времени блока 16 привода 9 отсасывающе- нагнетательных блоков, вытесняющих жидкость 7 посредством поршней 8 из цилиндров б в гидроаккумулятор 10.
Для эффективного демпфирования необходимо обеспечить кратность промежутков времени между взаимодействиями tnn периоду колебаний приемной системы 1, причем таким образом, чтобы взаимодействие происходило в момент достижения объектом 17 скорости, направленной вверх и обеспечивающей величину V2n, удовлетворяющую выражению (2), Для этого изменяют после каждого взаимодействия собственную частоту колебаний приемной системы 1. Этого достигают как изменением (уменьшением) массы М2п приемной системы 1 изложенным выше способом; так и изменением (снижением) расхода воздуха в мягких оболочках 5. Для этого реле времени блока 16, управляющее работой регулятора 21 расхода воздуха в мягких оболочках 5. и настроенное на время начала полета объекта 17, включает регулятор 21. который уменьшает подачу воздуха в мягкие оболочки 5 и тем самым обеспечивает сокращение собственных колебаний приемной системы 1. Блок 16 реле времени обеспечивает через каждый заранее определенный промежуток времени tnn включение откачки жидкости 7 для уменьшения массы и собственной частоты колебаний приемной системы 1 и сокращения расхода воздуха в мягких оболочках 5 на заранее рассчитанные величины. При этом горизонтальное расположение поршней 8 цилиндров 6 исключает нагрузки на них при вертикальных колебаниях приемной системы 1, а также предотвращает болтание жидкости 7 в цилиндрах 6. Когда вес объекта 17 уравновесится упругими силами наполнителя 3, прекращается и колебательный процесс приемной системы 1.
Применение предлагаемого устройства позволяет исключить сосредоточенные нагрузки на опорную поверхность, повысить за счет проточности мягких оболочек демпфирующие качества и снизить сейсмичность устройства; обеспечить сохранность испытуемого объекта и приемной системы; расширить диапазон масс испытуемых объектов, причем путем распределенного нагружения опорной поверхности существенно увеличить их массу, что может сократить номенклатуру испытательных стендов, а следовательно, материальные затраты на их создание.
Предлагаемое устройство расширяет диапазон моделируемых взаимодействий, что позволяет получить более достоверные результаты меньшими материальными затратами (на создание нового стенда, переналадку существующего, пересчет результатов моделирования на реальный процесс) и т.д.
Формула изобретения
1..Управляемое устройство для гашения
колебаний, содержащее платформу, упругие элементы и систему управления, включающую датчик, связываемый с перемещающимся объектом и исполнительным органом, обеспечивающим изменение
массы упругих элементов, отличающее- с я тем, что, с целью повышения эффективности за счет снижения сейсмичности при сбросе испытуемого объекта, упругие элементы разделены платформой, один из них
выполнен в виде резервуара, заполненного упруговязким наполнителем и соединен с исполнительным органом, а другой - в виде мягких проточных оболочек, заполненных воздухом, связываемых с источником сжатого воздуха посредством регулятора расхода воздуха и прижимаемых к опорной поверхности посредством регулируемой по длине тяги, соединенной с опорной поверхностью посредством замка, связанного с исполнительным органом и регулятором
расхода воздуха датчиком, представляющим
собой блок переналаживаемых реле времени.
2. Устройство поп.1,отличающеес я тем, что исполнительный орган выполнен в виде расположенных по обе стороны от резервуара цилиндров, разделенных соединенными с одним приводом поршнями на полости, из которых обращенные к резервуару заполнены жидкостью и связаны с
гидроаккумулятором.
t i., tlM
t,e
| название | год | авторы | номер документа |
|---|---|---|---|
| Парашютно-десантная платформа | 2021 |
|
RU2764475C1 |
| УДАРОЗАЩИТНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА С ПАССИВНОЙ СИСТЕМОЙ ДЕМПФИРОВАНИЯ | 2014 |
|
RU2555871C1 |
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ ДВИЖЕНИЯ | 1998 |
|
RU2244961C2 |
| Устройство дополнительного изгиба рабочих валков прокатной клети кварто | 1977 |
|
SU789178A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ УСТАНОВКА ДЛЯ ИСПЫТАНИЯ | 1967 |
|
SU197237A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2361750C2 |
| Парашютная платформа | 2021 |
|
RU2763204C1 |
| СИСТЕМА ВИБРОИЗОЛЯЦИИ С АВТОМАТИЧЕСКОЙ НАСТРОЙКОЙ И ПОДДЕРЖАНИЕМ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ | 2016 |
|
RU2637578C1 |
| ПОДШИПНИК КАЧЕНИЯ, СПОСОБ УПРАВЛЯЕМОГО ПОДВОДА СМАЗОЧНОГО МАТЕРИАЛА К ПОДШИПНИКУ КАЧЕНИЯ, УСТРОЙСТВО ДЛЯ ПОДВОДА СМАЗОЧНОГО МАТЕРИАЛА К ПОДШИПНИКАМ КАЧЕНИЯ, НАСОС ДЛЯ ДОЗИРОВАНИЯ СМАЗОЧНОГО МАТЕРИАЛА | 1994 |
|
RU2142078C1 |
| КОМБИНИРОВАННАЯ ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 2019 |
|
RU2712724C1 |
Использование: демпфирование ударных воздействий объектов большой массы. 5 rj wfjJF I П V Сущность изобретения: управляемое устройство содержит упругие элементы, один из которых выполнен в виде резервуара 2, заполоненного упруговязким наполнителем 3 и соединен с исполнительным органом, другой - в виде мягких проточных оболочек 5, заполненных воздухом. Резервуар и оболочки разделены платформой 4. Изменения импульса добиваются регулированием давления воздуха в оболочках 5 посредством регулятора 21 расхода воздуха и изменением с помощью привода 9 массы 7 жидкости в цилиндрах 6. обращенные к резервуару 2, полости которых связаны с гидроаккумулятором 10. Для согласования регулирования давления и изменения массы 7 жидкости предусмотрена система управления, включающая блок 16 переналаживаемых реле времени. 1 з.п. ф-лы. 2 ил. сл С х| W VI 00 ь.
Out. 2.
| Клюев В.В | |||
| Приборы и системы для измерения вибрации, шума и удара | |||
| Справочник | |||
| М.: Машиностроение, 1978, кн | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для гашения колебаний механических систем | 1961 |
|
SU151532A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
