Изобретение относится к области сельского хозяйства, в частности к сельскохозяйственным ирригационным системам, и может быть использовано в устройствах автоматического управления фронтальным или круговым движением многоопорной широкозахватной дождевальной машины фронтального и кругового движения.
Известен механизм стабилизации угла наклона стволов дождевального аппарата [1], включающий замкнутую емкость - противовес с воздушным и водосливным клапанами, в котором, с целью обеспечения оптимального угла наклона стволов дождевального аппарата при вращении вокруг вертикальной оси независимо от перекоса на рабочей позиции, механизм стабилизации снабжен центральной стойкой с карданной обоймой и двумя двуплечими рычагами, соединенными с охватывающей ее емкостью противовесом, выполненной в виде тора, причем емкость - противовес установлена с возможностью колебания в двух взаимно перпендикулярных плоскостях, а стволы снабжены рычагами управления их положения, взаимодействующими посредством гибких связей с двуплечими рычагами центральной стойки, при этом верхние плечи двуплечих рычагов соединены с верхними одноименными, а нижние - с нижними разноименными рычагами управления.
В описанном механизме стабилизации угла наклона стволов дождевального аппарата заслуживают внимания наличие гибких связей для решения поставленной нами технической задачи.
Известно устройство стабилизации курса фронтальной дождевальной машины [2], содержащее двуплечий рычаг, кинематически связанный с направляющим тросом, и установленные на корпусе чувствительные элементы отклонения от курса и аварийный выключатель, взаимодействующие с кулачком, укрепленным на оси качания рычага, в котором, с целью повышения надежности устройства, оно снабжено чувствительным элементом обрыва троса, установленным на кулачке и взаимодействующим с выступом на втором конце рычага, имеющего прямоугольную прорезь для обеспечения возможности скольжения рычага относительно оси качания, имеющего срезы по размеру прорезей, а кинематическая связь двуплечего рычага с направляющей осуществлена в виде рычага первого рода, одним концом закрепленного на корпусе в двухплоскостном шарнире, пропущенного через проушину в конце двуплечего рычага и имеющего на другом конце ролик, взаимодействующий с направляющей.
В описанном устройстве стабилизации курса фронтальной дождевальной машины заслуживает внимания чувствительный элемент обрыва троса.
Известно устройство управления многоопорной фронтальной дождевальной машиной [3], включающее прибор стабилизации курса, подключенный к двум таймерам задания скорости крайних тележек и выполненный в виде двух блоков контактов коррекции положения левого и правого крыльев, имеющих механическую связь со штангами, установленными с возможностью взаимодействия с направляющим тросом, а также блок управления электроуправляемыми клапанами включения дождевателей, разделенных на группы по числу опорных тележек, подключенных к источнику питания через замыкающие контакты прибора стабилизации курса, в котором, с целью повышения качества полива и экономии воды, устройство снабжено RS-триггерами, число которых соответствует числу электроуправляемых клапанов, включенных между блоками контактов коррекции положения правого и левого крыльев и электроуправляемыми клапанами, формирователем импульсов включения, выполненным в виде последовательно соединенных формирователя импульсов, первой схемы ИЛИ и параллельно подключенных к ее выходу входами установки RS-триггеров, а также дополнительными парами размыкающих и замыкающих контактов в каждом блоке контактов прибора стабилизации курса, последовательно включенными электронно-счетным блоком, первый вход которого подключен к последовательно включенным между источником питания и вторым входом первой схемы ИЛИ дополнительным размыкающим контактом, а второй - к выходу формирователя, и коммутатором выходов, два управляющих входа которого подключены к дополнительным замыкающим контактам, а выходы - к входам сброса RS-триггеров, электронно-счетный блок выполнен в виде генератора плактовых импульсов, подключенного к входу счетчика с дешифратором, и включает подключенную к блокирующему входу счетчика вторую схему ИЛИ, входы которой подключены к последнему выходу дешифратора и второму входу первой схемы ИЛИ.
К недостаткам описанного устройства управления многоопорной фронтальной дождевальной машиной относятся сложность конструкции и низкая эксплуатационная надежность.
Известно подвижное ирригационное устройство [4], состоящее из ряда взаимосвязанных трубных секций, каждая из которых включает участок трубы, поддерживаемый самоходной опорой с приводом, и свободный конец, причем трубные секции соединены гибкими муфтами, расположенными у свободного конца одной секции и участка трубы, с опорой соседней секции, и устройств управления приводами опор, размещенных на концах трубных секций с опорами и содержащих выключатели, связанные через чувствительные элементы с приводами опор и воспринимающие угловые перемещения трубопровода, чувствительный элемент каждого выключателя выполнен в виде карданного кольца, расположенного на стыке двух секций, и гибких тяг, соединенных со свободным концом секции и через шарнирную распорку с карданным кольцом, при этом карданное кольцо соединено с секциями посредством горизонтального и вертикального коромысел соответственно, а шарнирная распорка через управляющий рычаг связана с входом выключателя.
К недостаткам описанного подвижного ирригационного устройства относятся чрезмерное усложнение конструкции, низкая чувствительность элементов управления приводами самоходных опорных тележек, низкая эксплуатационная надежность, большое время запаздывания сигнала аварийной ситуации.
Известен дождеватель фронтальный с механизированным перемещением ДФ-120 «Днепр» [5, 6], выполненный в виде многоопорного трубопровода на двухколесных самоходных тележках со специальными фермами-открылками, на каждой из которых установлено по два среднеструйных дождевальных аппарата и механизм управления фронтальным перемещением в виде штанги и двух тяг, соединенных с водопроводящим трубопроводом, концевых выключателей, кулачкового вала, рычага, кулачка привода ртутного переключателя, барабана с тросом, пружины штанги, опорных роликов, подвески опорных роликов, ртутного переключателя и крепежных элементов.
К недостаткам описанного дождевателя относятся низкая эксплуатационная надежность из-за несовершенства конструкции механизма управления фронтальным перемещением.
Наиболее близким техническим решением является подвижное ирригационное устройство [7], состоящее из ряда взаимосвязанных трубных секций, каждая из которых включает участок трубы, поддерживаемый самоходной опорой с приводом, и свободный конец, причем секции соединены гибкими муфтами, расположенными у свободного конца одной секции и участка трубы, с опорой соседней секции, и устройств управления приводами опор, размещенных на концах трубных секций с опорами и содержащих выключатели, связанные посредствам каната, закрепленного концами на кронштейнах крайних самоходных опор, электрически связанные через чувствительные элементы с приводами тор и воспринимающие угловые перемещения трубных секций.
К недостаткам описанного подвижного ирригационного устройства, принятого нами в качестве прототипа, относится низкая эксплуатационная надежность, вызванная заклиниванием каната в кольце на конце штока концевого выключателя и отсутствие средств блокировки перемещения самоходных опор при чрезмерном натяжении или провисании троса.
Задача, на решение которой направлено заявленное изобретение, - повышение точности и надежности линейного перемещения водопроводящего трубопровода фронтальной многоопорной дождевальной машины.
Решение данной задачи состоит в упрощении конструкции устройств управления приводами самоходных опор водопроводящего трубопровода.
Результат достигается тем, что в известном подвижном ирригационном устройстве, состоящем из ряда взаимосвязанных трубных секций, каждая из которых включает участок трубы, поддерживаемый самоходной опорой с приводом, и свободный конец, причем трубные секции соединены гибкими муфтами, расположенными у свободного конца одной секции и участка трубы, с опорой соседней секции, и устройств управления приводом опор, размещенных на концах трубных секций с опорами и содержащих выключатели, связанные посредством каната, закрепленного концами на кронштейнах крайних самоходных опор, электрически связанные через чувствительные элементы с приводами опор и воспринимающие угловые перемещения трубных секций, согласно изобретению каждый конец каната снабжен силовым механизмом и механизмом перемещения свободного конца каната, при этом силовой механизм выполнен в виде полой резьбовой втулки, один конец которой размещен в кронштейне рамы самоходной опоры, а другой конец резьбовым участком смонтирован соосно в концевой муфте механизма перемещения. На поверхности полой резьбовой втулки между кронштейном рамы и концевой муфтой попарно установлены тарельчатые пружины сжатия, а механизм перемещения свободного конца каната имеет пару оппозиционно установленных концевых муфт и установленные в последовательный ряд промежуточные муфты, каждая из которых имеет радиально ориентированные цапфы. Цапфы промежуточных муфт кинематически связаны парами переключающихся двуплечих рычагов, а радиальные цапфы крайних муфт соединены с концами двуплечих рычагов тягами, образуя пространственный многократный параллелограммный шарнирный механизм. Выше названый канат размещен в сквозных отверстиях полой резьбой втулки, крайних и промежуточных муфт, а свободный конец каната конусным упором зафиксирован в отверстии крайней концевой муфты, к тому же установленный с возможностью осевого перемещения в корпусе щита устройства управления приводами промежуточных самоходных опор. Чувствительный элемент в виде штока соединен одним концом с концевым выключателем, а другим концом посредством шарового шарнира связан с ветвью каната, а чувствительный элемент в виде штока, установленного в корпусе щита устройства управления приводом каждой крайней самоходной опоры, снабжен двуплечим качающимся рычагом, длинное плечо которого имеет ролик, сопряженный с конусным упором на свободном конце каната. Отверстие в шаровом шарнире на конце штока имеет поверхность вращения, например параболы.
Изобретение поясняется чертежами (фиг.1-5).
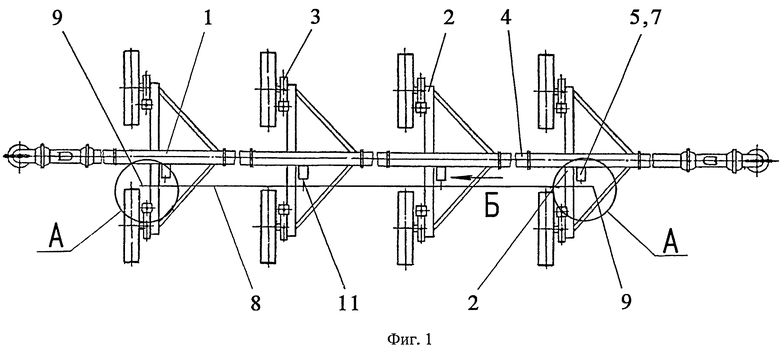
На фиг.1 изображено подвижное ирригационное устройство на самоходных опорах с системой стабилизации прямолинейности положения водопроводящего трубопровода, вид в плане.
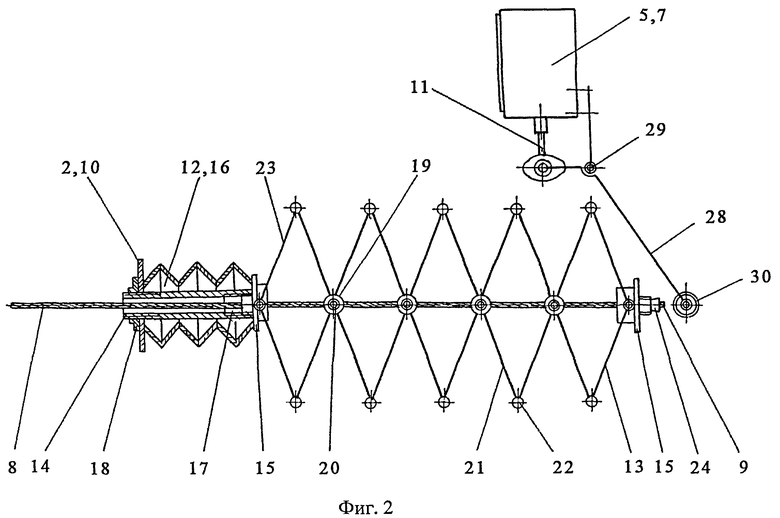
На фиг.2 - вид А на фиг.1, силовой механизм и механизм перемещения свободного конца каната на правой конечной самоходной опоре (на левой конечной самоходной опоре механизмы смонтированы оппозитно названым механизмам на правой опоре).
На фиг.3 - вид Б на фиг.1, сопряжение штока с концевым выключателем блока управления и шаровой опоры с ветвью каната системы стабилизации.
На фиг.4 - сечение В-В на фиг.2, выполнение отверстия в шаровом шарнире на конце штока в виде поверхности вращения для беспрепятственного перемещения ветви каната.
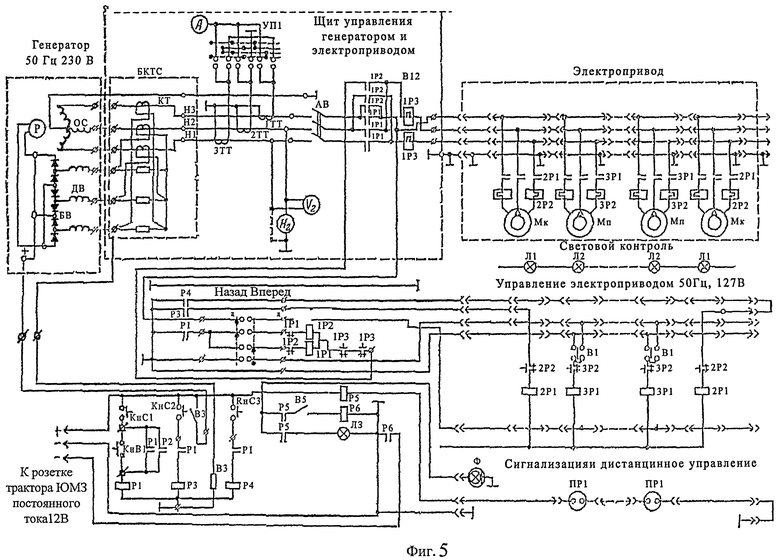
На фиг.5 показана общая известная принципиальная электрическая схема подвижного ирригационного устройства [8].
Подвижное ирригационное устройство (фиг.1) состоит из ряда взаимосвязанных трубных секций 1. Каждая трубная секция 1 включает участок трубы, поддерживаемый самоходной опорой 2 с приводом 3, и свободный конец. Трубные секции 1 соединены гибкими муфтами 4, расположенными у свободного конца трубных секций 1. Таким образом трубные секции 1 с самоходными опорами 2 образуют подвижное ирригационное устройство.
Каждая самоходная опора 2 имеет устройство 5 для управления приводом 3. Устройства 5 размещены на концах трубных секций 1 с самоходными опорами 2. Устройства 5 содержат концевые выключатели 6 (фиг.3), размещенные в корпусе 7 устройства 5 (фиг.2, 3). Концевые выключатели 6 кинематически связаны посредством каната 8 (фиг.3). Канат 8 закреплен своими концами 9 (фиг.2) на кронштейнах 10 крайних самоходных опор 2. Концевые выключатели 6 электрически связаны с приводами 3 самоходных опор 2 и через чувствительные элементы 11 (фиг.3) воспринимают угловые перемещения трубных секций 1.
Каждый конец 9 каната 8 снабжен силовым механизмом 12 и механизмом 13 перемещения свободного конца 9 каната 8 (фиг.2).
Силовой механизм 12 выполнен в виде полой резьбовой втулки 14, кронштейна 10 рамы самоходной опоры 2, концевой муфты 15 и тарельчатых пружин сжатия 16. Тарельчатые пружины сжатия 16 попарно установлены на полой резьбовой втулке 14 между кронштейном 10 и концевой муфтой 15. Полая резьбовая втулка 14 резьбовым участком 17 сопряжена с концевой муфтой 15. Вторым концом полая резьбовая втулка 14 размещена в отверстии кронштейна 10 рамы самоходной опоры 2 и зафиксирована в кронштейне 10 гайкой 18. При навинчивании гайки 18 тарельчатые пружины сжатия 16 сжимаются между кронштейном 10 и фланцем концевой муфты 15, создавая осевое усилие для натяжения каната 8 между кронштейнами 10 крайних и промежуточных самоходных опор 2.
Другой конец полой резьбовой втулки 14 резьбовым участком 17 соосно смонтирован в концевой муфте 15 механизма 13 перемещения конца 9 каната 8, образуя, таким образом, единый узел.
Механизм 13 перемещения свободного конца 9 каната 8 имеет пару оппозитно установленных концевых муфт 15 и установленные в последовательный ряд промежуточные муфты 19. Каждая концевая муфта 15 и каждая промежуточная муфта 19 имеет радиально ориентированные цапфы 20. Упомянутые цапфы 20 промежуточных муфт 19 кинематически связаны параллельно смонтированными парами перекрещивающихся двуплечих рычагов 21. Концы двуплечих рычагов 21, смонтированных на цапфах 20 промежуточных муфт 19, взаимно соединены осями 22 с дистанционными втулками на них. Радиально расположенные цапфы 20 крайних муфт 15 с концами перекрещивающихся двуплечих рычагов 21 соединены тягами 23. Таким образом, образуется пространственный многократный параллелограммный шарнирный механизм для натяжения каната 8 с постоянным усилием и большим диапазоном перемещений концов 9 каната 8 от кронштейнов 10 рам крайних самоходных опор 2.
Канат 8 размещен в сквозных отверстиях полой резьбовой втулки 14, крайних муфтах 15, промежуточных муфтах 19. Конец 9 каната 8 конусным упором 24 зафиксирован в отверстии крайней концевой муфты 15.
Установленный с возможностью осевого перемещения в корпусе 7 (фиг.3) устройства 5 управления приводами 3 (фиг.1) промежуточных самоходных опор 2 чувствительный элемент 11 в виде штока соединен одним концом с концевым выключателем 6, а другим концом посредством шарового шарнира 25 (фиг.3 и 4) связан с ветвью каната 8. Отверстие 26 в шаровом шарнире 25 на конце штока чувствительного элемента 11 имеет поверхность вращения, например параболоид и т.д. Шаровый шарнир 25 в утолщении на конце штока введен через диаметральную прорезь 27 и развернут на 90°.
Чувствительный элемент 11 в виде штока, установленного в корпусе 7 устройства 5 управления приводом 3 крайней самоходной опоры 2, снабжен двуплечим качающимся рычагом 28 (фиг.2). Ось 29 качающегося рычага 28 смонтирована посредством кронштейна на корпусе 7. Длинное плечо качающегося рычага 28 имеет ролик 30. Ролик 30 либо сопряжен с конусным упором 24 на свободном конце 9 каната 8, либо размещен с необходимым зазором для срабатывания при обрыве каната 8, либо при критических угловых перемещениях трубных секций 1.
Подвижное ирригационное устройство работает следующим образом.
В ирригационное устройство оросительная вода поступает от гидрантов, установленных вдоль трубопровода с шагом 54 метра. Конструктивная ширина устройства равна 448 метров, а рабочая ширина при поливе - 460 метров. Источник электроэнергии для приводов 3 самоходных опор 2 - передвижная электрическая станция - трактор ЮМЗ-6Л с ходоуменшителем СН-5А с навешенным на него генератором. Напряжение цепи электропривода - 220÷230 В, напряжение в цепи управления - 127 В, мощность электродвигателя самоходной опоры 1,1÷2 кВт. Управление электроприводом ирригационного устройства - дистанционное из кабины трактора. Напряжение цепи управления электроприводом 12 В постоянного тока от электрооборудования трактора.
Генератор передвижной электрической станции ЕСС5-82-42 общей мощностью 37,5 кВт. Номинальная частота вращения 1500 мин-1. Рабочая скорость передвижения электрической станции - 0,52 км/ч.
Принципиальная электрическая схема дождевателя «Днепр» показана на фиг.5. Источник электрической энергии - синхронный генератор с самовозбуждением основной обмотки статора (ОС) через полупроводниковый блок выпрямителей (БВ), подключенный к дополнительной обмотке статора (ДО).
Генератор оборудован стабилизирующим устройством, автоматически поддерживающим напряжение. Стабилизирующее устройство выполнено в виде блока компаундирующих трансформаторов и сопротивлений (БКТС).
Напряжение и частота тока, вырабатываемого генератором, контролируется вольтметром V и частометром Н, ток нагрузки - амперметром А.
Для запуска электрической станции включением вала отбора мощности трактора приводят во вращение генератор. Затем, поворачивая выключатель на пульте управления, дают ток первоначального возбуждения от аккумулятора рабочей батареи трактора на дополнительную обмотку статора. Изменяя частоту вращения коленчатого вала тракторного двигателя, доводят частоту тока генератора до 50 Гц и напряжение до 220÷230 В.
Приводят устройства в движение реверсивными магнитными пускателями 1Р1 или 1Р2, а изменяют направление движения универсальным переключателем УП2.
Реверсивные магнитные пускатели управляются дистанционно кнопками с пульта управления КнВ1 «Пуск» и «Стоп» и промежуточным реле Р1, включенным на напряжение 12 В от электрической системы трактора.
При нажатии кнопки «Пуск» включается промежуточное реле Р1, которое своими замыкающими контактами переключает одну из катушек реверсивного магнитного пускателя 1Р1 или 1Р2 в зависимости от положения переключателя УП2 - «Вперед» или «Назад», при этом включаются катушки магнитных пускателей 3Р1 промежуточных самоходных тележек. Одновременно у реле Р3 или Р4 замыкаются их замыкающие контакты, включаются катушки магнитных пускателей 2Р1 первой и последней тележек. Останавливают машину кнопкой «Стоп», при этом отключается реверсивный магнитный пускатель, а с ним - магнитные пускатели всех тележек. Первую и последнюю тележки можно также остановить соответственно кнопками КнС2 «Стоп первая» или КнС3 «Стоп последняя», в этом случае включается реле Р3 (или Р4 и отключается магнитный пускатель 2Р1 первой или последней тележки).
Рассмотрим передвижение самоходных опор 2 без подачи оросительной воды. В описанной выше электрической схеме показано, что электроприводы крайних самоходных опор 2 включаются в работу одновременно. Следовательно, левая и правая крайние самоходные опоры 2 начинают свое движение одновременно и перемещают кронштейны 10 фронтально к направлению движения, а вместе с ними натянутый канат 8. Включение и перемещение средних самоходных опор 2 было произведено также одновременно. Отверстие 26 шарового шарнира 25 чувствительного элемента 11 лишь поддерживает канат 8, а шток чувствительного элемента 11 не воздействует на концевой выключатель 6, смонтированный в корпусе 7 устройства 5 управления приводом 3.
Однако из-за различных условий перемещения опор 2 (фиг.1) одна из них начинает забегать вперед по сравнению с другими. Это забегание приведет к тому, что канат 8 в отверстии 26 (фиг.4) шарового шарнира 25 сместит назад шток чувствительного элемента 11 и выключит концевой выключатель 6 (фиг.3) в электроприводе данной самоходной опоры 2. Он будет выключен до тех пор, пока соседние самоходные опоры 2 не окажутся впереди неподвижно стоящей самоходной опоры 2. Перемещение каната 8 вперед приведет к включению его концевого выключателя 6.
При критических изгибах трубных секций 1 или обрыве каната 8 конусный упор 24 (фиг.2) под воздействием силового механизма 12 и механизма 13 перемещения свободного конца 9 каната 8 входит в контакт с роликом на длинном плече рычага 28, коротким плечом рычага 28 при повороте на оси 29 шток чувствительного элемента 11 воздействует на концевой выключатель 6 крайней самоходной опоры 2. Срабатывает сигнализация для принятия экстренных мер.
Таким образом, обеспечивается точность и надежность линейного перемещения трубных секций в подвижном ирригационном устройстве при существенном упрощении устройств управления приводами самоходных опор.
Источники информации
1. SU, А.С. №1429992, A01G 25/02, Б.И. №38, от 15.10.1988 г.
2. SU, А.С. №1099901, A01G 25/09, Б.И. №24, от 30.06.1984 г.
3. SU, А.С. №1501986, A01G 25/09, Б.И. №31, от 23.08.1989 г.
4. SU, патент №1269731, A01G 25/09, Б.И. №41, от 07.11.1986 г.
5. Д.М.Сандигурский и др. Механизация поливных работ. - 2-е изд., перераб. и доп. - М.: Колос, 1993. - 288 с, ил. - С.31-42, рис.21-26.
6. Мелиорация и водное хозяйство. Орошение: Справочник / Под ред. Б.Б.Шумакова. - М.: Колос, 1999. - 432 с, ил. - С. 106-110, рис.4.20.
7. С.Л.Жук. Модернизация дождевальной машины «Днепр» / Мелиорация и водное хозяйство, 2006. - №6., ил. С.30-31, рис.1 и 2.
8. Техническое описание и инструкция по эксплуатации дождевателя фронтального с механизированным перемещением «Днепр» ДФ-120, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА ДЛЯ ПРЕЦИЗИОННОГО ОРОШЕНИЯ | 2016 |
|
RU2631896C2 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2007 |
|
RU2351119C1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2018 |
|
RU2700385C1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2004 |
|
RU2269254C1 |
| Устройство для подачи воды к дождевальной машине в движении | 1984 |
|
SU1367834A3 |
| РАСХОДОМЕР ЖИДКИХ СРЕД В ОТКРЫТЫХ ВОДОЕМАХ И ВОДОТОКАХ | 2008 |
|
RU2380657C1 |
| Подвижное ирригационное устройство | 1979 |
|
SU1269731A3 |
| СИСТЕМА ПОДДЕРЖАНИЯ ПРЯМОЛИНЕЙНОСТИ ТРУБОПРОВОДА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2021 |
|
RU2763789C1 |
| Дождевальная машина с торцевой подачей воды в движении двухзвенным шарнирным водозабором | 2021 |
|
RU2760852C1 |
| Самоходная тележка многоопорной дождевальной машины | 1987 |
|
SU1613063A1 |


Устройство включает ряд взаимосвязанных трубных секций и устройства управления приводами опор. Каждая трубная секция включает участок трубы и свободный конец. Участок трубы поддерживают самоходной опорой с приводом. Секции соединены гибкими муфтами с опорой соседней секции. Муфты расположены у свободного конца участка трубы одной секции с опорой на соседнюю секцию. Устройства управления приводами опор размещены на концах трубных секций с опорами и содержат концевые выключатели. Концевые выключатели связаны посредством каната. Канат закреплен концами на кронштейнах крайних самоходных опор. Самоходные опоры электрически связаны через чувствительные элементы с приводами опор и воспринимают угловые перемещения трубных секций. Каждый конец каната снабжен силовым механизмом и механизмом перемещения свободного конца каната. Силовой механизм выполнен в виде полой резьбовой втулки, попарно установленных на ней тарельчатых пружин сжатия, концевой муфты и кронштейна. Один конец резьбовой втулки размещен в кронштейне рамы самоходной опоры. Другой конец резьбовой втулки резьбовым участком смонтирован соосно в концевой муфте механизма перемещения. На поверхности полой резьбовой втулки между кронштейном рамы и концевой муфтой попарно установлены тарельчатые пружины сжатия. Механизм перемещения свободного конца каната имеет пару оппозитно установленных концевых муфт и установленные в последовательный ряд промежуточные муфты. Каждая из промежуточных муфт имеет радиально ориентированные цапфы. Цапфы промежуточных муфт кинематически связаны парами перекрещивающихся двуплечих рычагов. Радиальные цапфы крайних муфт соединены с концами двуплечих перекрещивающихся рычагов тягами и образуют пространственный многократный параллелограммный шарнирный механизм. Канат размещен в сквозных отверстиях полой резьбовой втулки крайних и промежуточных муфт. Свободный конец каната конусным упором зафиксирован в отверстии крайней концевой муфты и установлен с возможностью осевого перемещения в корпусе устройства управления приводами промежуточных самоходных опор. Чувствительный элемент в виде штока соединен одним концом с концевым выключателем. Другим концом чувствительный элемент связан посредством шарового шарнира с ветвью каната. Чувствительный элемент в виде штока установлен в корпусе устройства управления привода каждой крайней самоходной опоры и снабжен двуплечим качающимся рычагом. Длинное плечо качающегося рычага имеет ролик, сопряженный с конусным упором на свободном конце каната. Такая конструкция позволит повысить точность и надежность перемещения водопроводящего трубопровода фронтальной многоопорной дождевальной машины. 1 з.п. ф-лы, 5 ил.
1. Подвижное ирригационное устройство, состоящее из ряда взаимосвязанных трубных секций, каждая из которых включает участок трубы, поддерживаемый самоходной опорой с приводом, и свободный конец, причем секции соединены гибкими муфтами, расположенными у свободного конца участка трубы одной секции с опорой на соседнюю секцию, и устройств управления приводами опор, размещенных на концах трубных секций с опорами и содержащих концевые выключатели, связанные посредством каната, закрепленного концами на кронштейнах крайних самоходных опор, электрически связанные через чувствительные элементы с приводами опор и воспринимающие угловые перемещения трубных секций, отличающееся тем, что каждый конец каната снабжен силовым механизмом и механизмом перемещения свободного конца каната, при этом силовой механизм выполнен в виде полой резьбовой втулки, попарно установленных на ней тарельчатых пружин сжатия, концевой муфты и кронштейна, причем один конец резьбовой втулки размещен в кронштейне рамы самоходной опоры, а другой конец резьбовым участком смонтирован соосно в концевой муфте механизма перемещения, на поверхности полой резьбовой втулки между кронштейном рамы и концевой муфтой попарно установлены тарельчатые пружины сжатия, а механизм перемещения свободного конца каната имеет пару оппозитно установленных концевых муфт и установленные в последовательный ряд промежуточные муфты, каждая из них имеет радиально ориентированные цапфы, упомянутые цапфы промежуточных муфт кинематически связаны парами перекрещивающихся двуплечих рычагов, а радиальные цапфы крайних муфт соединены с концами двуплечих перекрещивающихся рычагов тягами, образуя пространственный многократный параллелограммный шарнирный механизм, причем вышеназванный канат размещен в сквозных отверстиях полой резьбовой втулки крайних и промежуточных муфт, а свободный конец каната конусным упором зафиксирован в отверстии крайней концевой муфты, и установлен с возможностью осевого перемещения в корпусе устройства управления приводами промежуточных самоходных опор, причем чувствительный элемент в виде штока соединен одним концом с концевым выключателем, а другим концом посредством шарового шарнира связан с ветвью каната, а чувствительный элемент в виде штока, установленного в корпусе устройства управления привода каждой крайней самоходной опоры, снабжен двуплечим качающимся рычагом, длинное плечо которого имеет ролик, сопряженный с конусным упором на свободном конце каната.
2. Подвижное ирригационное устройство по п.1, отличающееся тем, что отверстие в шаровом шарнире на конце штока имеет поверхность вращения - параболоид.
| ГУБЕР К.В | |||
| и др | |||
| Машины для орошения и их техническое обслуживание | |||
| - М.: изд-во Высшая школа, 1982, С.164-177 | |||
| Устройство управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1501986A1 |
| Устройство стабилизации курса фронтальной дождевальной машины | 1982 |
|
SU1099901A1 |
| US 3610531 A, 05.10.1971 | |||
| Колесный дождевальный трубопровод | 1986 |
|
SU1402297A1 |

