Область техники, к которой относится изобретение
Изобретение относится к области телекоммуникационной, информационно-измерительной и вычислительной техники и, более точно, к способам регистрации пакетов навигационных данных, каждый из которых содержит передаваемые глобальной системой навигации данные, характеризующие местоположение и параметры перемещения движущегося объекта. Местоположение объекта указывается в пакете навигационных данных координатами географической точки размещения этого объекта на местности. Каждый пакет навигационных данных характеризует одну такую географическую точку. Соединяя эти точки отрезками прямых, получают траекторию движения объекта. К параметрам перемещения движущегося объекта относятся момент времени фиксации местоположения объекта, его скорость и направление его перемещения. При необходимости эти пакеты могут содержать также сенсорные данные, полученные от датчиков, расположенных на этом объекте. Сенсорные данные, входящие в эти пакеты, могут быть событийными, то есть могут отражать дискретно наступление тех или иных событий, и/или измерительными, то есть быть результатами измерений физических величин.
Изобретение может найти применение в различных телематических системах регистрации, в которых в качестве глобальной системы навигации применяются глобальная система позиционирования GPS-NAVSTAR, глобальная навигационная система ГЛОНАСС, система Galileo и другие подобные системы.
Изобретение может быть использовано в различных телематических системах мониторинга одного или многих движущихся объектов, например, наземных, речных, морских транспортных средств. Оно будет полезно в системах мониторинга, содержащих бортовое телематическое оборудование, установленное на каждом движущемся объекте, станцию мониторинга, содержащую компьютер, в котором накапливаются пакеты данных, принятые от бортового оборудования движущихся объектов, и средства передачи информации, связывающие станцию мониторинга с движущимися объектами.
Уровень техники
Известен способ регистрации пакетов навигационных данных, каждый из которых содержит данные, характеризующие местоположение движущегося объекта, состоящий в том, что при помощи навигационного приемника периодически получают от глобальной системы навигации пакеты данных и затем передают пакеты навигационных данных в накопитель, расположенный на этом объекте или на расстоянии от него, причем заранее выбранный постоянный период передачи этих пакетов в накопитель больше периода получения пакетов данных на выходе навигационного приемника (см. патент США №US 6,816,761 от 2001 г., кл. 701/35, 701/211 на изобретение «System and method for monitoring moving equipment operation»). В этом способе при необходимости перед передачей пакетов навигационных данных в накопитель в них вводят событийные сенсорные данные, полученные от датчиков, расположенных на этом объекте, и представленные сигналами о начале и конце некоторого участка пути.
Недостаток этого способа обусловлен тем, что в нем используется постоянный период передачи пакетов навигационных данных в накопитель, и заключается в том, что эти пакеты передают в накопитель независимо от текущей скорости перемещения движущегося объекта и текущих изменений направления его движения (то есть независимо от углов его поворота). Вследствие этого при достаточно высокой точности представления траектории движущегося объекта приходится передавать в накопитель неоправданно большое количество пакетов навигационных данных, что повышает затраты на эксплуатацию системы передачи данных и увеличивает требуемый объем памяти накопителя.
Прототипом предлагаемого способа является способ регистрации пакетов навигационных данных, каждый из которых содержит данные, характеризующие местоположение движущегося объекта, состоящий в том, что при помощи навигационного приемника периодически получают от глобальной системы навигации пакеты данных и затем передают пакеты навигационных данных в накопитель, расположенный на этом объекте или на расстоянии от него, причем период передачи этих пакетов в накопитель больше периода получения пакетов навигационных данных на выходе навигационного приемника (см. патент США №US 6,765,499 от 2002 г., кл. 340/989, 342/357, 701/213 на изобретение «Vehicle tracking unit providing variable frequency transmission and related methods»). В этом способе в отличие от указанного аналога (см. патент США №US 6,816,761) обеспечивается возможность изменения периода передачи пакетов данных в накопитель по событию, инициирующему установку нового постоянного значения последующих периодов. В патенте на прототип такое событие названо инициирующим. В способе-прототипе по сигналу о некотором инициирующем событии устанавливают новое постоянное значение периода передачи пакетов данных в накопитель для всех периодов, следующих за этим событием, до появления сигнала о новом инициирующем событии. Согласно этому способу таким инициирующим событием может быть превышение скоростью движущегося объекта заданного порога, получение сигнала об изменении периода передачи пакетов данных от центра мониторинга движущегося объекта, достижение предопределенных моментов времени и заполнение заданного объема промежуточной памяти пакетов данных перед передачей их в накопитель, расположенный в центре мониторинга, то есть на расстоянии от движущегося объекта.
Недостаток этого способа обусловлен тем, что по сигналу об инициирующем событии устанавливают постоянное значение только последующих периодов передачи пакетов данных в накопитель независимо от текущей скорости перемещения движущегося объекта и текущих изменений направления его движения, и при этом текущий период передачи пакета данных не регулируется и остается постоянным. Это не позволяет существенно уменьшить количество пакетов навигационных данных, передаваемых в накопитель, так как текущий период передачи пакетов данных, который был установлен к моменту возникновения очередного инициирующего события, не изменяется, а между соседними по времени инициирующими событиями период передачи пакетов данных остается постоянным.
Кроме того, все указанные в прототипе инициирующие события не позволяют обеспечить регулирования значений каждого периода передачи пакетов данных на всем пути движения объекта, так как связаны только с крайними случаями (превышение порога скорости объекта, заполнение заданного объема памяти) и специальными ситуациями (получение сигнала от центра мониторинга, достижение предопределенных моментов времени), которые могут возникнуть при движении объекта и при этом не связаны с текущими характеристиками перемещения объекта и достаточно редки.
Раскрытие (сущность) изобретения
Задачей предлагаемого изобретения является разработка такого способа регистрации пакетов навигационных данных, передаваемых глобальной системой навигации и характеризующих местоположение движущегося объекта, который по сравнению с прототипом обеспечивал бы технический результат в виде одновременного достижения следующих целей:
- сокращение количества пакетов навигационных данных, передаваемых в накопитель, при высокой точности построения траектории движения объекта;
- снижение регулярных затрат на эксплуатацию систем передачи данных в системе мониторинга движущихся объектов;
- сокращение требуемого объема памяти накопителя, хранящего зарегистрированные пакеты данных;
- расширение круга задач, решаемых системой мониторинга движущихся объектов, и тем самым увеличение количества областей применения этих систем.
При осуществлении этих целей должны быть учтены различные условия применения, характеризующиеся скоростью и массой движущегося объекта, состоянием дорожного покрытия и т.п.
Этот технический результат достигается, во-первых, благодаря тому, что в способе регистрации пакетов навигационных данных, характеризующих местоположение движущегося объекта, при помощи навигационного приемника периодически получают от глобальной системы навигации пакеты данных и затем передают пакеты данных в накопитель, расположенный на этом объекте или на расстоянии от него, причем период передачи этих пакетов в накопитель больше периода получения пакетов навигационных данных на выходе навигационного приемника, и, в отличие от прототипа, передачу пакетов данных в накопитель производят каждый раз при выполнении условий:
если |ΔА|>φ,
и если при этом
|ΔА|×S>β×Smax,
либо если |ΔА|≤φ,
и если при этом
Т-Т*≥p,
где
|ΔА|=|А*-А|×α+(360°-|А*-А|)×(1-α).
Здесь
|ΔА| - абсолютное значение угла поворота движущегося объекта, независящее от направления угла поворота;
φ - задаваемое в зависимости от условий применения абсолютное значение угла изменения направления движения объекта в градусах, при непревышении которого передают пакеты данных в накопитель с таким же постоянным периодом, как при прямолинейном движении объекта;
S - значение скорости движения объекта в узлах, указанное в последнем пакете данных, полученном от навигационного приемника;
Smax - максимально возможная скорость движущегося объекта, указанная в узлах;
β - абсолютное значение угла поворота движущегося объекта в градусах, определяющее минимальный период передачи пакетов в накопитель при максимально возможной скорости Smax объекта;
Т - момент времени фиксации местоположения объекта глобальной системой навигации, указанный в последнем пакете данных, полученном от навигационного приемника;
Т* - момент времени фиксации местоположения объекта глобальной системой навигации, указанный в последнем пакете данных, переданном в накопитель;
p - константа, определяющая период передачи пакетов данных в накопитель, значение которой задают в зависимости от условий применения; p>0;
А - азимут в градусах, характеризующий направление движения объекта и указанный в последнем пакете данных, полученном от навигационного приемника;
А* - азимут в градусах, характеризующий направление движения объекта и указанный в последнем пакете данных, переданном в накопитель;
α=1, если |А*-А|≤180°;
α=0, если |А*-А|>180°.
При выполнении указанных условий обеспечивается завершение каждого текущего периода передачи пакетов данных в накопитель тогда, когда значение каждого текущего периода становится в некотором смысле оптимальным для текущих характеристик движения объекта. Тем самым предлагаемый способ более эффективно регулирует значения всех периодов передачи пакетов данных, чем способ-прототип, который не может изменить текущие периоды передачи пакетов данных, а назначает новые постоянные значения последующих периодов передачи этих пакетов.
Это позволяет сократить количество пакетов навигационных данных, передаваемых в накопитель, при сохранении требуемой точности построения траектории движения объекта; снизить регулярные затраты на эксплуатацию систем передачи данных в системе мониторинга движущихся объектов и сократить требуемый объем памяти накопителя, хранящего зарегистрированные пакеты данных.
Во-вторых, получению технического результата способствует то, что первый принятый пакет данных всегда передают в накопитель без проверки указанных выше условий передачи пакетов в накопитель. Это позволяет упростить способ регистрации пакетов навигационных данных.
В-третьих, технический результат достигается благодаря тому, что в пакеты данных, передаваемые в накопитель, вводят сенсорные данные, полученные от датчиков, расположенных на движущемся объекте, причем эти сенсорные данные могут быть как измерительными, так и событийными. Это позволяет расширить круг задач, решаемых системой мониторинга движущихся объектов, и тем самым увеличить количество областей применения этих систем. В качестве датчиков измерительных сенсорных данных, или иначе говоря, датчиков физических величин, могут быть использованы цифровые измерители различных величин, например датчики температуры, давления, уровня жидкости, расхода топлива, расхода электроэнергии и т.п. В качестве датчиков событийных сенсорных данных, или иначе говоря, датчиков событий, могут быть использованы различные релейные датчики, например датчики открывания двери транспортного средства, и датчики достижения пороговых значений различных физических величин.
Краткое описание чертежей
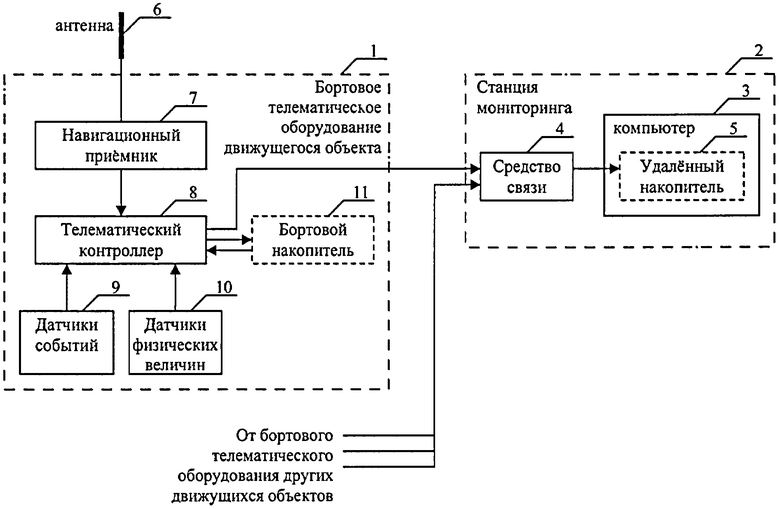
На чертеже показан пример структурной обобщенной схемы системы мониторинга движущихся объектов, на которой показаны возможности регистрации пакетов навигационных данных в удаленном накопителе, расположенном на станции мониторинга, и в бортовом накопителе, установленном на движущемся объекте.
Осуществление изобретения
Предлагаемый способ предназначен для применения в различных системах мониторинга движущихся объектов, например транспортных средств, с бортовым телематическим оборудованием. Возможны два основных типа этих систем: система с регистрацией пакетов навигационных данных в удаленном накопителе, расположенном на станции мониторинга, и система с регистрацией пакетов навигационных данных в бортовом накопителе, установленном на движущемся объекте. В обобщенной схеме на чертеже показаны одновременно оба типа этих систем. Системы обоих типов различаются только использованием удаленного или бортового накопителей. В остальном структуры систем обоих типов одинаковы. Ниже одновременно рассматриваются оба типа систем и указывается различие между ними.
Система мониторинга с регистрацией пакетов навигационных данных в удаленном накопителе содержит бортовое телематическое оборудование 1, установленное на каждом движущемся объекте (на чертеже не показан), и станцию 2 мониторинга, на которую передаются пакеты данных, принятые от бортового оборудования 1 движущихся объектов. Станция 2 мониторинга, которую иногда называют также центром мониторинга, содержит компьютер 3, выполняющий функции центрального компьютера системы мониторинга, и соединенное с ним средство 4 связи, обеспечивающее связь по радиоканалу с бортовым оборудованием 1 каждого движущегося объекта. В системах мониторинга с регистрацией пакетов навигационных данных в удаленном накопителе, расположенном на станции мониторинга 2, в состав центрального компьютера 3 входит удаленный накопитель 5, в котором регистрируют пакеты данных.
Бортовое телематическое оборудование 1 содержит антенну 6 для приема сигналов глобальной системы навигации (на чертеже не показана), соединенный с антенной 6 навигационный приемник 7, принимающий навигационные данные от глобальной системы навигации, и телематический контроллер 8, соединенный с навигационным приемником 7. Кроме того, при необходимости в состав бортового телематического оборудования 1 могут быть введены датчики 9 событий и датчики 10 физических величин, соединенные с телематическим контроллером 8. Телематический контроллер 8 снабжен средством связи (на чертеже не показано) для передачи по радиоканалу пакетов данных к станции 2 мониторинга через ее средство 4 связи. В системах мониторинга с регистрацией пакетов навигационных данных в бортовом накопителе, расположенном на движущемся объекте, в состав бортового телематического оборудования 1 входит бортовой накопитель 11, соединенный с телематическим контроллером 8. Данные из бортового накопителя 11 могут передаваться телематическим контроллером 8 по радиоканалу через средство 4 связи в центральный компьютер 3 станции мониторинга 2. Бортовой накопитель 11 может быть выполнен, например, в виде флэш-памяти. В этом случае его можно переносить на станцию мониторинга и подключать к центральному компьютеру 3.
В системах мониторинга с регистрацией пакетов навигационных данных в удаленном накопителе 5 отсутствует бортовой накопитель 11, а в системах мониторинга с регистрацией пакетов навигационных данных в бортовом накопителе 11 может отсутствовать удаленный накопитель 5.
Средство 4 связи станции 2 мониторинга и средство связи телематического контроллера 8 могут быть реализованы на основе технологии сотовой связи с использованием, например, GSM/GPRS-модемов, CDMA-модемов или технологий спутниковой связи, в частности, Global Star, Irridium, VSAT.
В качестве глобальной системы навигации может использоваться глобальная система позиционирования GPS-NAVSTAR, глобальная навигационная система ГЛОНАСС, система Galileo и другие подобные системы.
Регистрацию пакетов навигационных данных в системе мониторинга, показанной на чертеже, производят следующим образом.
Радиосигналы от глобальной системы навигации через антенну 6 поступают в навигационный приемник 7, на выходе которого периодически получают пакеты навигационных данных, каждый из которых содержит информацию о местоположении движущегося объекта, его скорости, азимуте, характеризующем направление его движения, и моменте времени фиксации местоположения объекта глобальной системой навигации. Возможное содержание пакета навигационных данных приведено, например, в «Описании протокола NMEA-0183 версии 2.1», в котором рассмотрена система сообщений для обмена информацией между навигационным GPS-приемником и потребителями навигационной информации (83.htm). Эти пакеты с выхода навигационного приемника 7 считывают в телематический контроллер 8.
При необходимости в телематическом контроллере 8 пакеты данных, полученные на выходе навигационного приемника 7, могут быть преобразованы для дальнейшего использования и передачи. Это преобразование может включать в себя, например, выбор необходимых для дальнейшего использования параметров из набора параметров, имеющихся в пакете данных, их переформатирование, приведение к нужной системе единиц измерения и т.п. Однако это преобразование не обязательно, если данные, полученные на выходе навигационного приемника, представлены в подходящей для дальнейшего использования форме, или если это преобразование осуществляют одновременно с проверкой эмпирических математических условий, которые будут рассмотрены ниже.
Из телематического контроллера 8 преобразованные либо непреобразованные пакеты навигационных данных передают в нужный накопитель (либо в накопитель 11, либо в накопитель 5 в зависимости от того, в каком их этих накопителей производят регистрацию пакетов навигационных данных) при выполнении эмпирических математических условий передачи каждого из этих пакетов. Эти условия будут приведены ниже. В телематическом контроллере 8 проверяют выполнение этих условий относительно двух пакетов данных: последнего пакета, полученного от навигационного приемника 7 и еще не переданного в накопитель, и последнего пакета, переданного в этот накопитель. Последний пакет, полученный от навигационного приемника 7 и еще не переданный в накопитель, является очередным пакетом, который может быть передан в накопитель. Под пакетом, полученным от навигационного приемника 7, понимается либо непреобразованный пакет, либо пакет, преобразованный из пакета, считанного телематическим контроллером 8 непосредственно с выхода навигационного приемника 7.
Если эти условия выполняются, то с помощью телематического контроллера 8 передают очередной пакет навигационных данных в нужный накопитель - накопитель 11, расположенный на движущемся объекте, либо в накопитель 5, расположенный на расстоянии от этого объекта. При этом передачу очередного пакета в удаленный накопитель 5 осуществляют по радиоканалу посредством содержащегося в телематическом контроллере 8 средства связи (на чертеже не показано) и средства 4 связи станции 2 мониторинга. Если эти условия не выполняются, то телематический контроллер 8 переходит к проверке этих условий относительно следующего очередного пакета, еще не переданного в нужный накопитель (11 или 5), и последнего пакета, переданного в этот накопитель. Текущий период передачи пакета в накопитель (11 или 5) определяется промежутком временем между моментом времени, в который в накопитель был отправлен последний переданный в него пакет, и моментом времени, в который в этот накопитель отправлен очередной последующий передаваемый пакет. Поскольку не каждый пакет, полученный от навигационного приемника 7, передается в накопитель, то средний период передачи пакетов в накопитель больше периода получения пакетов на выходе навигационного приемника.
Ниже приведем названные выше эмпирические математические условия передачи очередных пакетов в накопитель.
С помощью телематического контроллера 8 передачу пакетов в накопитель (11 или 5) производят каждый раз при выполнении эмпирических математических условий:
если 
и если при этом

либо если 
и если при этом

где

Здесь
|ΔА| - абсолютное значение угла поворота движущегося объекта, независящее от направления поворота;
φ - задаваемое в зависимости от условий применения абсолютное значение угла изменения направления движения объекта в градусах, при непревышении которого передают пакеты данных в накопитель с таким же постоянным периодом, как при прямолинейном движении объекта;
S - значение скорости движения объекта в узлах, указанное в последнем пакете данных, полученном от навигационного приемника;
Smax - максимально возможная скорость движущегося объекта в узлах, указанная, например, в паспортных данных движущегося объекта;
β - абсолютное значение угла поворота объекта в градусах, определяющее минимальный период передачи пакетов в накопитель при максимально возможной скорости Smax объекта;
Т - момент времени фиксации местоположения объекта глобальной системой навигации, указанный в последнем пакете данных, полученном от навигационного приемника;
Т* - момент времени фиксации местоположения объекта глобальной системой навигации, указанный в последнем пакете данных, переданном в накопитель;
p - константа, определяющая период передачи пакетов данных в накопитель, значение которой задают в зависимости от условий применения; p>0;
А - азимут в градусах, характеризующий направление движения объекта и указанный в последнем пакете данных, полученном от навигационного приемника;
А* - азимут в градусах, характеризующий направление движения объекта и указанный в последнем пакете данных, переданном в накопитель;
α=1, если |А*-А|≤180°;
α=0, если |А*-А|>180°.
В условиях (1) и (3) абсолютное значение φ угла изменения направления движения объекта, при непревышении которого пакеты данных передают в накопитель с таким же постоянным периодом, как при прямолинейном движении объекта, задают в телематическом контроллере 8 в зависимости от условий применения либо как константу, либо в соответствии с какими-либо эмпирическими математическими условиями. Например, абсолютное значение φ угла изменения направления движения объекта устанавливают в соответствии со следующими эмпирическими условиями:
φ=0, если Smax<60,
φ=1, если 60≤Smax<120,
φ=2, если 120≤Smax<200,
φ=3, если 200≤Smax,
где Smax - максимально возможная скорость движущегося объекта в узлах, указанная, например, в паспорте транспортного средства.
Это позволяет учесть максимально возможную скорость движущегося объекта, например транспортного средства, как его характеристику, ограничивающую возможности его поворота. Согласно этой характеристике, чем выше максимально возможная (паспортная) скорость движения объекта, тем выше абсолютное значение φ угла изменения направления движения объекта, при непревышении которого пакеты данных передают в накопитель с таким же постоянным периодом, как и при прямолинейном движении объекта.
При выполнении условий (1) и (2) движущийся объект перемещается с достаточно большим изменением направления его движения, и период передачи пакетов в накопитель является переменным. При выполнении условий (3) и (4) движущийся объект перемещается по прямой или с достаточно малым изменением направления его движения, и период передачи пакетов в накопитель остается постоянным.
Поясним формулу (5). Для характеристики направлений движения объекта в формуле (5) используют геодезический азимут, представляющий угол между направлением на север (в северном полушарии Земли) и направлением движения объекта, отсчитываемый по часовой стрелке. Примем, что используют истинный азимут, т.е. за исходное направление принимают географический меридиан. Заметим, что азимуты (А* и А) имеют один и тот же знак, независимо от направления поворота движения объекта:
0≤А*≤360°, 0≤А≤360°.
Для упрощения принято, что за один период передачи пакетов в накопитель движущийся объект не может сделать поворот влево или вправо более чем на 180 градусов. Такое допущение практически приемлемо, т.к., с одной стороны, это достаточно большой угол, а с другой стороны, движущийся объект, например транспортное средство, трудно повернуть на больший угол за сравнительное небольшое время указанного периода. При этом допущении будем считать, что если |А*-А|≤180°, то α=1 и формула (5) приобретает вид:
|ΔА|=|А*-А|.
Если же |А*-А|>180°, то α=0 и формула (5) приобретает вид:
|ΔА|=360°-|А*-А|.
Первый принятый от навигационного приемника 7 пакет данных с помощью телематического контроллера 8 всегда передают в нужный накопитель без проверки условий (1-4), указанных выше.
При необходимости в пакеты данных, передаваемые в накопитель, с помощью телематического котроллера 8 вводят сенсорные данные, полученные от датчиков 9 событий и/или датчиков 10 физических величин, расположенных на движущемся объекте. Это позволяет, например, организовать с помощью датчиков 9 контроль состояния механизмов, расположенных на транспортном средстве, например замка зажигания, дверей салона, крышки капота, систем подъема ковша, кузова, груза, а с помощью датчиков 10 - контроль параметров работы двигателя транспортного средства (например, числа оборотов коленчатого вала, температуры в системе охлаждения, давления в системе смазки), контроль давления на оси, расхода топлива, уровня топлива в баках, напряжения в цепи питания и т.п. Кроме того, в передаваемые пакеты данных телематический контроллер 8 может включать значения некоторых производных величин, вычисленные им на основе сенсорных данных, полученных от датчиков 9 и 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ВЫХОДНОЙ ИНФОРМАЦИИ ПО СОСТОЯНИЮ МНОЖЕСТВА ВХОДНЫХ СИГНАЛОВ В СИСТЕМАХ СБОРА, ПРЕОБРАЗОВАНИЯ, ПЕРЕДАЧИ ДАННЫХ И УПРАВЛЕНИЯ | 2007 |
|
RU2362211C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| СИСТЕМА КОНТРОЛЯ, НАВИГАЦИИ И МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2004 |
|
RU2268175C1 |
| Телематический прибор | 2019 |
|
RU2736321C1 |
| СИСТЕМА УЧЁТА, НАВИГАЦИИ И МОНИТОРИНГА ОБЪЕКТОВ | 2017 |
|
RU2648967C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| СПОСОБ НАВИГАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ СРЕДСТВАМИ | 2014 |
|
RU2561644C1 |
Изобретение относится к способам регистрации пакетов навигационных данных, характеризующих местоположение движущегося объекта и полученных от глобальной системы навигации. Технический результат - сокращение объема данных, передаваемых в накопитель, при сохранении требуемой точности построения траектории движения объекта. При необходимости в эти пакеты включают сенсорные данные, получаемые от датчиков, расположенных на этом объекте. Передачу пакетов данных в накопитель, расположенный на этом объекте или на расстоянии от него, производят каждый раз при выполнении эмпирических математических условий, в которых используются характеристики направления движения объекта, содержащиеся в последнем полученном и последнем переданном пакетах данных, скорость движения объекта, содержащаяся в последнем полученном пакете данных, максимально возможная скорость этого объекта и константы, выбираемые в зависимости от диапазона этой максимально возможной скорости. 1 з.п. ф-лы, 1 ил.
1. Способ регистрации пакетов навигационных данных, характеризующих местоположение движущегося объекта, состоящий в том, что при помощи навигационного приемника периодически получают от глобальной системы навигации пакеты данных и затем передают пакеты данных в накопитель, расположенный на этом объекте или на расстоянии от него, причем период передачи этих пакетов в накопитель больше периода получения пакетов данных на выходе навигационного приемника, отличающийся тем, что первый пакет данных передают в накопитель, а передачу последующих пакетов данных в накопитель производят каждый раз при выполнении условий:
если |ΔА|>φ,
и если при этом
|ΔA|·S>β·Smax,
либо если |ΔА|≤φ,
и если при этом
Т-Т*≥p,
где |ΔА|=|А*-А|·α+(360°-|А*-А|)·(1-α), здесь |ΔА| - абсолютное значение угла поворота движущегося объекта, независящее от направления поворота;
φ - задаваемое в зависимости от условий применения абсолютное значение величины угла изменения направления движения объекта в градусах, при непревышении которого передают пакеты данных в накопитель с таким же постоянным периодом, как при прямолинейном движении объекта;
S - значение скорости движения объекта в узлах, указанное в последнем пакете данных, полученном от навигационного приемника;
Smax - максимально возможная скорость движущегося объекта, указанная в узлах;
β - абсолютное значение угла поворота движущегося объекта в градусах, определяющее минимальный период передачи пакетов в накопитель при максимально возможной скорости Smax объекта;
Т - момент времени фиксации местоположения объекта глобальной системой навигации, указанный в последнем пакете данных, полученном от навигационного приемника;
Т* - момент времени фиксации местоположения объекта глобальной системой навигации, указанный в последнем пакете данных, переданном в накопитель;
p - константа, определяющая период передачи пакетов данных в накопитель, значение которой задают в зависимости от условий применения, p>0;
А - азимут в градусах, характеризующий направление движения объекта и указанный в последнем пакете данных, полученном от навигационного приемника;
А* - азимут в градусах, характеризующий направление движения объекта и указанный в последнем пакете данных, переданном в накопитель;
α=1, если |А*-А|≤180°;
α=0, если |А*-А|>180°.
2. Способ по п.1, отличающийся тем, что в пакеты данных, передаваемые в накопитель, вводят сенсорные данные, полученные от датчиков, расположенных на движущемся объекте.
| US 6765499 B2, 20.07.2004 | |||
| US 6816761 B2, 09.11.2004 | |||
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207262C1 |
| СПОСОБ ИНТЕРПОЛЯЦИИ ЗНАЧЕНИЙ ПОДПИКСЕЛОВ | 2002 |
|
RU2317654C2 |
| Станд для испытания стеклодувных формовочных приборов | 1933 |
|
SU39433A1 |

