Область техники, к которой относится изобретение
Предмет изобретения, раскрытый в данном документе, относится к обнаружению и/или оценке компонентов многолучевого распространения для сигналов, принимаемых от спутниковых систем определения местоположения.
Уровень техники
Спутниковая система определения местоположения (SPS) типично содержит систему орбитальных спутников Земли, позволяющую объектам определять свое местоположение на Земле, по меньшей мере, частично на основе сигналов, принимаемых от спутников. Такой SPS-спутник типично передает сигнал, помеченный с помощью повторяющегося псевдослучайного шумового (PRN) кода из заданного числа элементарных сигналов. Например, спутник в совокупности глобальной навигационной спутниковой системы (GNSS), такой как GPS или Galileo, может передавать сигнал, помеченный с помощью PRN-кода, который является отличимым от PRN-кодов, передаваемых посредством других спутников в совокупности.
Чтобы оценивать местоположение в приемном устройстве, навигационная система может выполнять измерения псевдодальности до спутников «в поле зрения» приемного устройства с использованием известных технологий, по меньшей мере, частично на основе обнаружений PRN-кодов в сигналах, принимаемых от спутников. Такая псевдодальность до спутника может быть определена, по меньшей мере, частично на основе временного сдвига кода, обнаруженного в принимаемом сигнале, помеченном с помощью PRN-кода, ассоциированного со спутником, во время процесса обнаружения принимаемого сигнала в приемном устройстве. Чтобы обнаруживать принимаемый сигнал, навигационная система типично коррелирует принимаемый сигнал с локально сформированным PRN-кодом, ассоциированным со спутником. Например, такая навигационная система типично коррелирует этот принимаемый сигнал с несколькими сдвинутыми по коду и/или времени версиями данного локально сформированного PRN-кода. Обнаружение конкретной сдвинутой по времени и/или по коду версии, дающее в результате корреляцию с самой высокой мощностью сигнала, может указывать временной сдвиг кода, ассоциированный с обнаруженным сигналом, для использования при измерении псевдодальности, как пояснено выше.
Фиг.1A иллюстрирует применение SPS-системы, посредством которого абонентская станция 100 в системе беспроводной связи принимает передачи от спутников 102a, 102b, 102c, 102d в линии прямой видимости до абонентской станции 100 и извлекает измерения времени из четырех или более передач. Абонентская станция 100 может предоставлять эти измерения в объект определения местоположения (PDE) 104, который определяет положение станции из измерений. Альтернативно, абонентская станция 100 может определять собственное положение из этой информации.
Абонентская станция 100 может выполнять поиск передачи от конкретного спутника посредством корреляции PRN-кода для спутника с принимаемым сигналом. Принимаемый сигнал типично содержит комбинацию передач от одного или более спутников в рамках линии прямой видимости до приемного устройства в станции 100 при наличии шума. Корреляция типично выполняется за время интегрирования «I», которое может быть выражено как произведение Nc и М, где Nc - это время когерентного интегрирования, а М - это число когерентных интегрирований, которые некогерентно комбинированы. Для конкретного PRN-кода значения корреляции типично ассоциированы с соответствующими сдвигами PRN-кода и доплеровскими элементами разрешения, чтобы задавать двумерную корреляционную функцию.
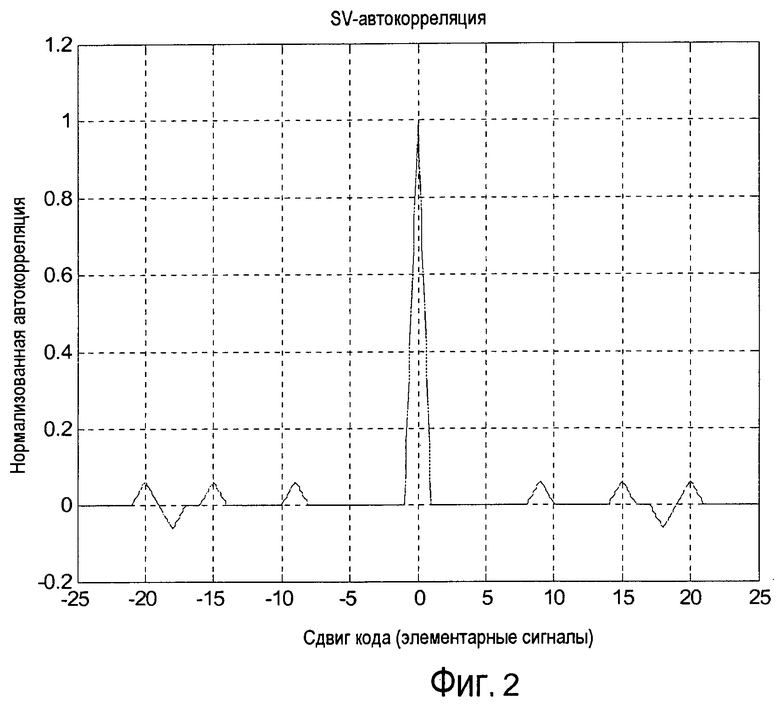
Фиг.2 иллюстрирует примерную идеализированную корреляционную функцию для SPS-сигнала, принимаемого вдоль линии прямой видимости при отсутствии помех от многолучевых сигналов. Согласно этому примеру, SPS-сигнал является GPS-сигналом. Фиг.3 предоставляет подробный вид примерной корреляционной функции. Пики корреляционной функции определяются и сравниваются с заранее определенным пороговым значением шума. Пороговое значение типично выбирается так, что вероятность сигнала ложной тревоги, вероятность ложного обнаружения временного сдвига кода принимаемого SPS-сигнала равна или ниже заранее определенного значения. Треугольная форма корреляционной функции по фиг.3 указывает, что имеется небольшая или отсутствует корреляция между принимаемым GPS-сигналом и локальной репликой кода, когда смещение временного сдвига кода превышает приблизительно 1 элементарный сигнал в любом направлении. Большая часть мощности в корреляционной функции по фиг.3 возникает в области между смещением в +1 и -1 элементарный сигнал от принимаемого сигнала GPS-кода прямого пути.
Фиг.4 является схемой, иллюстрирующей автокорреляционную функцию для прямого сигнала 401, комбинированного с многолучевым сигналом 403 с положительной полярностью. Результирующий составной сигнал 405 иллюстрирует эффекты, вызываемые отраженным многолучевым сигналом 403, создающим помехи сигналу прямого пути 401 по мере того, как эти два сигнала 401 и 403 принимаются в антенне и обрабатываются в приемном устройстве. Хотя фиг.4 иллюстрирует только один многолучевой сигнал, для нескольких многолучевых сигналов характерно вносить вклад в искажения сигнала прямого пути. В общем, многолучевые сигналы могут содержать сигнал от передающего устройства, который отражается от гор, здания и т.д. до достижения приемного устройства. Многолучевые сигналы являются задержанными относительно прямого сигнала вследствие возросшего расстояния, которое они проходят от передающего устройства до приемного устройства, относительно сигнала прямого пути. В результате отражений многолучевые сигналы типично имеют более низкую амплитуду по сравнению с сигналом прямого пути. Согласно этому примеру, многолучевой сигнал 403 суммируется с прямым сигналом 401, чтобы давать в результате составной сигнал 405.
Хотя многолучевой сигнал 403, согласно этому примеру, проиллюстрирован как имеющий положительную полярность относительно прямого сигнала 401, возможно то, что многолучевые сигналы поступают в приемное устройство с полярностью, противоположной полярности прямого сигнала. Для случая, когда многолучевой сигнал имеет полярность, противоположную полярности прямого сигнала, результирующий составной сигнал будет иметь уменьшенную амплитуду относительно прямого сигнала вследствие подавления, вызываемого многолучевым сигналом с отрицательной полярностью.
Как описано выше, наложение в приемном устройстве какого-либо дополнительного сигнала на требуемый прямой сигнал от спутника в течение периода времени, когда возникает корреляция сигналов, может искажать автокорреляционную функцию и формировать измененную корреляционную функцию для составного сигнала, к примеру, как проиллюстрировано посредством составного сигнала 405 на фиг.4. Эти искажения могут приводить к ошибкам во время функций отслеживания корреляции, которые могут вызывать ошибки в измерениях псевдодальности и которые дополнительно могут формировать ошибки в оцененных координатах местоположения для приемного устройства.
Сущность изобретения
В одном аспекте принимается сигнал, содержащий, по меньшей мере, один сигнал модуляции бинарной смещенной несущей (BOC). Сигнал BOC-модуляции модулируется с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из упомянутых элементарных сигналов имеет заданный интервал.
В другом аспекте принимаемый сигнал коррелируется с частями множества элементарных сигналов, чтобы предоставлять сигнал мощности. Части элементарных сигналов меньше заданного интервала.
В дополнительном аспекте обнаруживается наличие многолучевого сигнала в принимаемом сигнале. Обнаружение многолучевого распространения, по меньшей мере, частично основано на одной или более характеристик сигнала мощности.
Краткое описание чертежей
Неограничивающие и неисчерпывающие примеры будут описаны со ссылкой на следующие чертежи, на которых одинаковые позиционные обозначения ссылаются на одинаковые элементы по всем чертежам.
Фиг.1 является блок-схемой примера спутниковой системы определения местоположения (SPS).
Фиг.2 является схемой, иллюстрирующей автокорреляционную функцию для SPS-сигнала.
Фиг.3 является схемой, иллюстрирующей подробный вид автокорреляционной функции для SPS-сигнала.
Фиг.4 является схемой, иллюстрирующей автокорреляционную функцию для прямого SPS-сигнала, комбинированного с многолучевым сигналом с положительной полярностью.
Фиг.5 является блок-схемой последовательности операций примера способа для автокорреляции BOC-сигнала, чтобы обнаруживать многолучевой сигнал.
Фиг.6 является примерной временной диаграммой, иллюстрирующей формирование сигнала бинарной смещенной несущей (BOC), извлеченного из последовательности PRN-кодов.
Фиг.7 является схемой, иллюстрирующей автокорреляционную функцию для BOC-сигнала, извлеченного из последовательности PRN-кодов.
Фиг.8 является схемой, иллюстрирующей подробный вид автокорреляционной функции для BOC-сигнала.
Фиг.9 является схемой, иллюстрирующей автокорреляционную функцию для первой половины элементарных сигналов в кодовой последовательности BOC-сигнала.
Фиг.10 является схемой, иллюстрирующей автокорреляционную функцию для первой половины элементарных сигналов в кодовой последовательности прямого BOC-сигнала, комбинированного с многолучевым сигналом с положительной полярностью.
Фиг.11 является блок-схемой последовательности операций примерного способа для автокорреляции BOC-сигнала посредством комбинирования корреляционной функции для первой половины каждого из множества элементарных сигналов BOC-сигнала и корреляционной функции для второй половины каждого из множества элементарных сигналов BOC-сигнала.
Фиг.12 является схемой, иллюстрирующей автокорреляционную функцию для первой половины каждого элементарного сигнала прямого BOC-сигнала, аддитивно комбинированную с автокорреляционной функцией для второй половины каждого элементарного сигнала прямого BOC-сигнала.
Фиг.13 является схемой, иллюстрирующей корреляцию BOC-сигнала посредством разностного комбинирования корреляционной функции для первой половины каждого элементарного сигнала BOC-сигнала и корреляционной функции для второй половины каждого элементарного сигнала BOC-сигнала.
Фиг.14 является блок-схемой примерной системы для обработки сигналов бинарной смещенной несущей, извлеченных из PRN-кодов, чтобы определять обнаружение местоположения.
Фиг.15 является схематичным представлением примерной абонентской станции.
Подробное описание изобретения
Ссылки по всему данному подробному описанию на «один пример», «один признак», «пример» или «признак» означают, что конкретный признак, структура или характеристика, описанная в связи с признаком и/или примером, включена, по меньшей мере, в один признак и/или пример заявленного предмета изобретения. Таким образом, появления фразы «в одном примере», «пример», «в одном признаке» или «признак» в различных местах по всему данному подробному описанию не обязательно все ссылаются на один и тот же признак и/или пример. Кроме того, конкретные признаки, структуры или характеристики могут быть комбинированы в одном или более примеров и/или признаков.
Способы, описанные в данном документе, могут быть реализованы посредством различных средств в зависимости от вариантов применения согласно конкретным примерным реализациям. Например, эти способы могут быть реализованы в аппаратных средствах, микропрограммном обеспечении, программном обеспечении и/или комбинациях вышеозначенного. При реализации в аппаратных средствах блок обработки может быть реализован в одной или более специализированных интегральных схем (ASIC), процессоров цифровых сигналов (DSP), устройств обработки цифровых сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, других блоков устройств, выполненных с возможностью осуществлять описанные в данном документе функции, и/или в комбинациях вышеозначенного.
«Инструкции», упоминаемые в данном документе, относятся к выражениям, которые представляют одну или более логических операций. Например, инструкции могут быть «машиночитаемыми» посредством интерпретации посредством машины для выполнения одной или более операций для одного или более объектов данных. Тем не менее, это просто пример инструкций, и заявленный предмет изобретения не ограничен в этом отношении. В другом примере инструкции, упоминаемые в данном документе, могут относиться к кодированным командам, которые являются исполняемыми посредством схемы обработки, имеющей набор команд, который включает в себя кодированные команды. Такая инструкция может быть кодирована в форме машинного языка, понятного для схемы обработки. К тому же это просто примеры инструкций, и заявленный предмет изобретения не ограничен в этом отношении.
«Носитель данных», упоминаемый в данном документе, относится к носителям, способным поддерживать хранение выражений, которые воспринимаются одной или более машинами. Например, носитель данных может содержать одно или более устройств хранения для хранения машиночитаемых инструкций и/или информации. Эти устройства хранения могут содержать любой из нескольких типов носителей, в том числе, например, магнитные, оптические или полупроводниковые носители хранения данных. Эти запоминающие устройства также могут содержать любой тип долговременных, кратковременных, энергозависимых или энергонезависимых запоминающих устройств. Тем не менее, это просто примеры носителей данных, и заявленный предмет изобретения не ограничен в этом отношении.
Если прямо не указано иное, как очевидно из нижеследующего пояснения, следует принимать во внимание, что в данном подробном описании пояснения, использующие такие термины, как «обработка», «вычисление», «расчет», «выбор», «формирование», «предоставление», «запрещение», «определение местоположения», «завершение», «идентификация», «инициализация», «обнаружение», «получение», «выступание в качестве хоста», «поддержание», «представление», «оценка», «прием», «передача», «определение» и/или т.п., упоминаются как действия и/или процессы, которые могут быть выполнены вычислительной платформой, такой как компьютер или аналогичное электронное вычислительное устройство, которое обрабатывает и/или преобразует данные, представленные как физические электронные и/или магнитные величины и/или другие физические величины, в процессорах, запоминающих устройствах, регистрах и/или других устройствах хранения, передачи, приема и/или отображения информации вычислительной платформы. Эти действия и/или процессы могут быть выполнены вычислительной платформой под управлением машиночитаемых инструкций, сохраненных, например, в носителе данных. Эти машиночитаемые инструкции могут содержать, например, программное обеспечение или микропрограммное обеспечение, хранимое в носителе данных, включенном как часть вычислительной платформы (к примеру, включенном как часть схемы обработки или внешнем к такой схеме обработки). Дополнительно, если явно не указано иное, процесс, описанный в данном документе в отношении блок-схем последовательности операций или иных элементов, также может выполняться и/или управляться, полностью или частично, этой вычислительной платформой.
Способы определения местоположения, описанные в данном документе, могут использоваться для различных сетей беспроводной связи, таких как беспроводная глобальная вычислительная сеть (WWAN), беспроводная локальная вычислительная сеть (WLAN), беспроводная персональная сеть (WPAN) и т.д. Термины «сеть» и «система» могут быть использованы взаимозаменяемо в данном документе. WWAN может быть сетью с множественным доступом с кодовым разделением каналов (CDMA), сетью с множественным доступом с временным разделением каналов (TDMA), сетью с множественным доступом с частотным разделением каналов (FDMA), сетью с ортогональным множественным доступом с частотным разделением каналов (OFDMA), сетью с множественным доступом с частотным разделением каналов на одной несущей (SC-FDMA) и т.д. CDMA-сеть может реализовывать одну или более технологий радиосвязи (RAT), например cdma2000, широкополосный CDMA (W-CDMA) и т.д. помимо прочих технологий радиосвязи. Здесь cdma2000 может включать в себя технологии, реализованные согласно стандартам IS-95, IS-2000 и IS-856. TDMA-сеть может реализовывать глобальную систему мобильной связи (GSM), цифровую усовершенствованную систему мобильной телефонной связи (D-AMPS) или какую-либо другую RAT. GSM и W-CDMA описываются в документах от консорциума с названием «Партнерский проект третьего поколения (3GPP)». Cdma2000 описывается в документах от консорциума с названием «Партнерский проект третьего поколения 2 (3GPP2)». Документы 3GPP и 3GPP2 являются общедоступными. WLAN, например, может содержать сеть IEEE 802.11x, а WPAN может содержать Bluetooth-сеть, IEEE 802.15x. Эти технологии определения местоположения, описанные в данном документе, также могут использоваться для любой комбинации WWAN, WLAN и/или WPAN.
Согласно примеру, устройство и/или система могут оценивать свое местоположение, по меньшей мере, частично на основе сигналов, принимаемых от SV. В частности, такое устройство и/или система могут получать измерения «псевдодальности», содержащие приближения расстояний между ассоциированными SV и навигационным спутниковым приемным устройством. В конкретном примере такая псевдодальность может быть определена в приемном устройстве, которое допускает обработку сигналов из одного или более SV как часть спутниковой системы определения местоположения (SPS). Эта SPS может содержать, например, систему глобального позиционирования (GPS), Galileo, Glonass, помимо прочего, или любую SPS, разработанную в будущем. Чтобы определять свое положение, спутниковое навигационное приемное устройство может получать измерения псевдодальности до трех или более спутников, а также свои положения во время передачи. Зная орбитальные параметры SV, эти положения могут быть вычислены в любой момент времени. Измерение псевдодальности затем может быть определено, по меньшей мере, частично на основе времени, в течение которого сигнал проходит из SV в приемное устройство, умноженного на скорость света. Хотя технологии, описанные в данном документе, могут быть предоставлены как реализации определения местоположения в SPS типа GPS и/или Galileo в качестве конкретных иллюстраций согласно конкретным примерам, следует понимать, что эти технологии также могут применяться к другим типам SPS, и что заявленный предмет изобретения не ограничен в этом отношении.
Согласно примеру, устройство и/или система могут оценивать свое местоположение, по меньшей мере, частично на основе сигналов, принимаемых от спутников. В частности такое устройство и/или система могут получать измерения «псевдодальности», содержащие приближения расстояний между ассоциированными спутниками и навигационным спутниковым приемным устройством. В конкретном примере такая псевдодальность может быть определена в приемном устройстве, которое допускает обработку сигналов из одного или более спутников как часть спутниковой системы определения местоположения (SPS). Эта SPS может содержать, например, систему глобального позиционирования (GPS), Galileo, Glonass, помимо прочего, или любую SPS, разработанную в будущем. Чтобы определять свое положение, спутниковое навигационное приемное устройство может получать измерения псевдодальности до трех или более спутников, а также свои положения во время передачи. Зная орбитальные параметры спутников, эти положения могут быть вычислены в любой момент времени. Измерение псевдодальности затем может быть определено, по меньшей мере, частично на основе времени, в течение которого сигнал проходит из спутника в приемное устройство, умноженного на скорость света. Хотя технологии, описанные в данном документе, могут быть предоставлены как реализации определения местоположения в SPS типа GPS и/или Galileo в качестве конкретных иллюстраций, следует понимать, что эти технологии также могут применяться к другим типам SPS, и что заявленный предмет изобретения не ограничен в этом отношении.
Способы, описанные в данном документе, могут использоваться с любой из нескольких SPS, в том числе, к примеру, вышеуказанной SPS. Кроме того, такие способы могут использоваться в системах определения положения, которые используют псевдоспутники или комбинацию спутников и псевдоспутников. Псевдоспутники могут содержать наземные передающие устройства, которые передают в широковещательном режиме PRN-код или другой код измерения дальности (к примеру, подобный сотовому сигналу GPS или CDMA), модулированный на несущем сигнале L-полосы (или другой частоты), который может синхронизироваться с GPS-временем. Такому передающему устройству может быть назначен уникальный PRN-код, чтобы разрешать идентификацию удаленным приемным устройством. Псевдоспутники используются в случаях, когда GPS-сигналы из орбитального спутника могут быть недоступны, таких как туннели, шахты, здания, городские каньоны или другие закрытые участки. Другая реализация псевдоспутников известна как радиомаяки. Термин «спутник», при использовании в данном документе, имеет намерение включать в себя псевдоспутники, эквиваленты псевдоспутников и, возможно, другие элементы. Термин «SPS-сигналы», при использовании в данном документе, имеет намерение включать в себя SPS-подобные сигналы от псевдоспутников или эквивалентов псевдоспутников.
Глобальная навигационная спутниковая система (GNSS), как упоминается в данном документе, относится к SPS, содержащей спутники, передающие синхронизированные навигационные сигналы согласно общему формату сигнализации. Такая GNSS может содержать, например, созвездие спутников на синхронизированных орбитах, чтобы передавать навигационные сигналы в местоположения на обширной части поверхности Земли одновременно из нескольких спутников в созвездии. Спутник, который является членом конкретного GNSS-созвездия, типично передает навигационные сигналы в формате, который является уникальным для конкретного формата GNSS. Соответственно, способы для обнаружения навигационного сигнала, передаваемого посредством спутника в первой GNSS, могут быть изменены для обнаружения навигационного сигнала, передаваемого спутником во второй GNSS. В конкретном примере, хотя заявленный предмет изобретения не ограничен в этом отношении, следует понимать, что GPS, Galileo и Glonass представляют GNSS, которая отличается от других двух названных SPS. Тем не менее, это просто примеры SPS, ассоциированной с различными GNSS, и заявленный предмет изобретения не ограничен в этом отношении.
Согласно примеру, навигационное приемное устройство может получать измерение псевдодальности до конкретного спутника, по меньшей мере, частично, на основе обнаружения сигнала от конкретного спутника, который кодируется с помощью последовательности периодически повторяющихся PRN-кодов. Обнаружение этого сигнала может содержать обнаружение «временного сдвига кода», который ссылается на время и ассоциирован с точкой в последовательности PRN-кодов. В одном конкретном примере, такой временной сдвиг кода может ссылаться на состояние локально сформированного синхросигнала и конкретного элементарного сигнала в последовательности PRN-кодов. Тем не менее, это просто пример того, как временной сдвиг кода может быть представлен, и заявленный предмет изобретения не ограничен в этом отношении.
Чтобы обнаруживать временной сдвиг кода в принимаемом SPS-сигнале, навигационная система может коррелировать принимаемый сигнал с несколькими сдвинутыми по времени и/или по коду версиями локально сформированной последовательности PRN-кодов, ассоциированной с «гипотезами временного сдвига кода», охватывающими весь период последовательности периодически повторяющихся PRN-кодов. В конкретном примере Galileo-сигнала последовательность PRN-кодов может содержать 4092 элементарных сигналов и повторяется каждые четыре миллисекунды. Последовательность PRN-кодов может модулироваться с помощью 1,023 МГц прямоугольной волны, чтобы формировать сигнал BOC(1,1) (поясненный ниже). Соответственно, чтобы обнаруживать временной сдвиг кода сигнала, принимаемого от передающего Galileo-устройства, навигационная система может коррелировать принимаемый сигнал с 4092 или более версиями локально сформированной BOC-последовательности, извлеченной из последовательности PRN-кодов, ассоциированной с передающим Galileo-устройством, сдвинутой по фазе с приращениями в один элементарный сигнал или менее.
Как пояснено выше, для нескольких многолучевых сигналов характерно вызывать искажения сигнала прямого пути, принимаемого от SPS-спутника в приемном устройстве. Снова возвращаясь к фиг.4, показан пример, в котором многолучевой сигнал 403 суммируется с прямым сигналом 401, чтобы давать в результате составной сигнал 405. Разность между составным сигналом 405 и прямым сигналом 401 может упоминаться как ошибка многолучевого распространения.
Как также описано выше, искажения, вызываемые посредством многолучевых сигналов, могут приводить к ошибкам во время функций отслеживания корреляции, которые могут вызывать ошибки в измерениях псевдодальности, которые могут в свою очередь дополнительно формировать ошибки в оцененных координатах местоположения для приемного устройства.
Фиг.5 является блок-схемой последовательности операций примера способа для обнаружения компонентов многолучевого распространения в принимаемом SPS-сигнале. На этапе 510 сигнал принимается, при этом сигнал содержит, по меньшей мере, один сигнал модуляции бинарной смещенной несущей (BOC). Сигнал BOC-модуляции может модулироваться с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из упомянутых элементарных сигналов имеет заданный интервал. На этапе 520 принимаемый сигнал коррелируется с частями множества элементарных сигналов, чтобы предоставлять сигнал мощности. Части элементарных сигналов меньше упомянутого заданного интервала. На этапе 530 наличие многолучевого сигнала обнаруживается в принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик сигнала мощности. Способ в соответствии с заявленным предметом изобретения может включать в себя все, более чем все или менее чем все из этапов 510-530, и объем заявленного предмета изобретения не ограничен в этом отношении. В одной реализации все или части примерного способа, проиллюстрированного на фиг.5, а также другие примеры, описанные в данном документе, могут выполняться посредством абонентской станции, такой как абонентская станция, описанная ниже в связи с фиг.15.
Согласно одному примеру, часть множества элементарных сигналов, используемых в корреляции, может включать в себя область первой половины. Область первой половины может содержать приблизительно половину периода элементарного сигнала в пределах от начала периода элементарного сигнала приблизительно до середины периода элементарного сигнала для каждого из множества элементарных сигналов для кодовой последовательности сигнала модуляции бинарного смещения. Согласно другому примеру, часть множества элементарных сигналов, используемых в корреляции, может включать в себя область второй половины. Область второй половины может содержать приблизительно половину периода элементарного сигнала в пределах приблизительно от середины периода элементарного сигнала до конца периода элементарного сигнала. Тем не менее, это просто примеры возможных областей, и объем заявленного предмета изобретения не ограничен в этом отношении.
Согласно примеру, сигнал модуляции бинарной смещенной несущей может содержать сигнал BOC(1,1), извлеченный, по меньшей мере, частично из псевдослучайного шумового сигнала. Сигнал BOC(1,1) может приниматься от спутника, согласно примеру. Также согласно примеру, спутник может содержать Galileo-спутник, хотя объем заявленного предмета изобретения не ограничен в этом отношении. Дополнительно, согласно примеру, BOC-сигнал может приниматься в абонентской станции, такой как, согласно этому примеру, абонентская станция 100, описанная выше.
Кроме того, согласно одному примеру, области могут быть заданы посредством программируемых параметров. Согласно одной реализации, такие параметры могут сохраняться в запоминающем устройстве в абонентской станции, например в запоминающем устройстве 1530, описанном ниже, хотя объем заявленного предмета изобретения не ограничен в этом отношении. Программируемые параметры, согласно некоторым примерам, могут включать в себя, но не только, параметр, указывающий либо период первой половины элементарного сигнала, либо период второй половины элементарного сигнала, и/или параметр, указывающий размер области.
Согласно примеру, приемное устройство может принимать SPS-сигнал, кодированный с помощью периодически повторяющегося PRN-кода, от спутника. Согласно одной или более реализаций, PRN-код может быть кодирован согласно сигналу модуляции бинарной смещенной несущей (BOC). Чтобы обнаруживать первый сигнал, такое приемное устройство может обнаруживать доплеровскую частоту в принимаемом сигнале при корреляции сдвинутых по времени и/или по коду версий локально сформированной кодовой последовательности с принимаемым первым сигналом. В конкретном примере, когда первый спутник передает SPS-сигнал, кодированный с помощью периодически повторяющегося PRN-кода длиной в 4092 элементарных сигналов, принимаемый сигнал может быть коррелирован всего с 4092 или более версиями ассоциированной локально сформированной кодовой последовательности, сдвинутой по времени и/или по коду в одном элементарном сигнале или меньших приращениях. Тем не менее, это просто пример того, как сигнал от спутника конкретной SPS может быть обнаружен, и заявленный предмет изобретения не ограничен в этом отношении. Эта операция корреляции для модулированного в соответствии с BOC(1,1) PRN-сигнала может выражаться согласно отношению (1) следующим образом:

где
m - это число элементарных сигналов в последовательности периодически повторяющихся PRN-кодов сигнала, принимаемого от спутника;
CP - это временной сдвиг кода, обнаруживаемый в сигнале, принимаемом от спутника в начале отсчета времени;
Chipi - это i-й элементарный сигнал в локально сформированной последовательности PRN-кодов для спутника, 0≤i<m;
RSi - это i-й сегмент в сигнале, принимаемом от спутника, 0≤i<m; и
t1, t2 - это период элементарного сигнала, за который выполняется интеграция.
Как можно заметить из вышеприведенного отношения (1), h находится в диапазоне поиска от 0 до m-1, что влечет за собой выполнение числа m операций корреляции для сигнала, принимаемого от спутника, чтобы выполнять полный поиск гипотез временного сдвига кода во всем интервале PRN-кодов для обнаружения результата максимальной корреляции.
Термин «сигнал мощности» при использовании в данном документе может обозначать вывод корреляционной функции. Согласно примеру, ссылаясь на вышеприведенное отношение 1, сигнал мощности может содержать суммирование m интеграций, выполняемых за период от t1 до t2 для элементарных сигналов в кодовой последовательности.
Фиг.6 является примерной временной диаграммой, иллюстрирующей формирование сигнала бинарной смещенной несущей (BOC), извлеченного из последовательности PRN-кодов. Хотя код приблизительного обнаружения (C/A) GPS содержит сигнал двухпозиционной фазовой манипуляции с частотой передачи элементарных сигналов в 1,023 МГц, Galileo GNSS может использовать BOC-сигнал. Помимо этого, будущие GPS-спутники также могут использовать BOC-сигнал, такой как L1C-сигнал. Для BOC-сигналов PRN-код смешивается с прямоугольной волной на данной поднесущей частоте. Обозначение BOC(1,1) указывает, что сигнал имеет поднесущую частоту с прямоугольной волной в 1,023 МГц и скорость передачи элементарных сигналов в 1,023 МГц. Формирование примерного сигнала BOC(1,1) проиллюстрировано на фиг.6. Верхняя строка на фиг.6 - это прямоугольная волна 601 в 1,023 МГц, средняя строка содержит часть примерного кода 603 расширения в 1,023 МГц (PRN-кода), а нижняя строка - это результирующий сигнал 605 BOC(1,1). Хотя BOC-сигналы раскрываются в данном документе как используемые в Galileo GNSS, другие реализации могут содержать BOC-сигналы, используемые в других спутниковых системах определения местоположения, и объем заявленного предмета изобретения не ограничен в этом отношении. Дополнительно, хотя примеры описаны в данном документе с использованием сигналов BOC(1,1), другой вариант BOC может использоваться в других примерах. В частности, пример может использовать сигнал BOC(5,1), хотя объем заявленного предмета изобретения не ограничен в этом отношении.
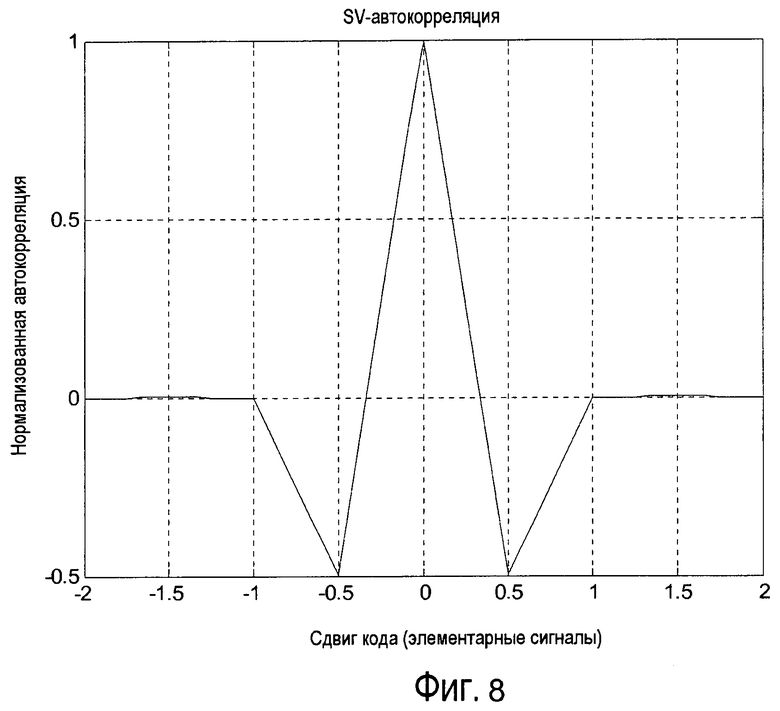
Фиг.7 является схемой, иллюстрирующей автокорреляционную функцию для сигнала BOC(1,1), извлеченного из последовательности PRN-кодов, и фиг.8 является подробным видом автокорреляционной функции. По сравнению с автокорреляционной функцией GPS-сигнала, проиллюстрированной на фиг.2-3, модуляция поднесущей с прямоугольной волной, используемая для BOC(1,1), инструктирует автокорреляционной функции, проиллюстрированной на фиг.7-8, иметь более острый главный пик и два меньших отрицательных пика побочных максимумов. По сравнению с автокорреляционной функцией GPS, проиллюстрированной, например, на фиг.2-3, главный пик автокорреляционной функции BOC имеет наклон в три раза более крутой. Например, главный пик автокорреляционной функции GPS имеет наклон в 1, в то время как главный пик автокорреляционной функции BOC имеет наклон в 3. Как можно видеть на фиг.7-8, первые нули автокорреляционной функции BOC(1,1) располагаются в +/-1/3 элементарного сигнала от 0-го элементарного сигнала (местоположение максимума главного пика).
Характеристики автокорреляционной функции фиг.7-8 позволяют предоставлять улучшенное обнаружение многолучевых сигналов. Например, передние фронты пиков побочных максимумов имеют отличающиеся друг от друга наклоны (по абсолютному значению) (наклон переднего фронта первого пика побочных максимумов составляет 1, в то время как наклон переднего фронта второго пика побочных максимумов составляет 3). Кроме того, передний фронт первого пика побочных максимумов имеет наклон, отличный от наклона переднего фронта пика главного максимума. Отличающиеся наклоны могут приводить к изменениям соответствующих относительных амплитуд и/или относительных местоположений побочного максимума и/или пиков главного максимума при наличии многолучевого сигнала. Изменения относительной амплитуды и/или относительного разделения побочных максимумов и/или главных пиков при наличии одного или более многолучевых сигналов позволяют предоставлять информацию, полезную при обнаружении и/или оценке ошибки многолучевого распространения. Согласно другому примеру, точки перехода через нуль могут иметь тенденцию перемещаться при наличии одного или более многолучевых сигналов. Изменения точек перехода через нуль позволяют предоставлять информацию, полезную для обнаружения и/или оценки ошибки многолучевого распространения.
Для примерных форм сигнала, проиллюстрированных на различных чертежах, поясненных в данном документе, бесконечная полоса пропускания предполагается просто в качестве иллюстрации. В случае системы с ограниченной полосой пропускания, например, резкие пики должны быть более закругленными.
Для типичного вычисления SPS-автокорреляции разнесение в 2 выборки в расчете на выборку элементарного сигнала может быть достаточным для адекватного кодового отслеживания. Для BOC-сигналов, тем не менее, разнесение в 2 выборки в расчете на выборку элементарного сигнала при традиционных технологиях автокорреляции может приводить к потере сигнала вследствие формы сигнала автокорреляционной функции между максимумом главного пика и побочными максимумами. Интерполяция также может оказываться проблематичной вследствие формы сигнала между максимумом главного пика и побочными максимумами.
Согласно примеру автокорреляционной функции сигнала BOC(1,1) в соответствии с заявленным предметом изобретения, корреляционная функция может выполняться посредством обработки только части каждого периода элементарного сигнала. Согласно одному примеру, часть может содержать первую половину периода элементарного сигнала. Согласно другому примеру, часть может содержать вторую половину периода элементарного сигнала. Например, ссылаясь на фиг.6, границы для одного элементарного сигнала могут быть очерчены границами A и B элементарных сигналов. Часть элементарного сигнала, очерченная границами A и B, которая может обрабатываться во время обработки автокорреляции, согласно одному примеру, может содержать первую половину между границей A и серединой периода элементарного сигнала, помеченную как часть C, которая, согласно этому примеру, содержит приблизительно первую половину периода элементарного сигнала. Область D за пределами области C первой половины не обрабатывается в этом примере во время обработки автокорреляции. Что касается вышеприведенного отношения 1, элементарный сигнал, заданный границами A и B, может представлять период T элементарного сигнала, и первая половина C может представляться частью в пределах t1-t2, где t1=0 и t2=T/2. Согласно примеру с использованием второй половины D периодов элементарного сигнала, вторая половина D может представляться частью в пределах t1-t2, где t1=T/2 и t2=T.
Следует отметить, что, согласно этому примеру, первая половина и вторая половина частично ограничены переходом BOC-сигнала в середине каждого элементарного сигнала. Конечно, согласно этим примерам, период элементарного сигнала, очерченный границами A и B, является просто одним из многих периодов элементарного сигнала в сигналах BOC(1,1), которые могут быть коррелированы таким образом. Дополнительно, хотя этот пример описывает обработку первых или вторых половин периода элементарного сигнала, другие примеры возможны с другими размерами областей, а также другими местоположениями областей. Примеры, описанные в данном документе, позволяют предоставлять обнаружение ошибки многолучевого распространения вследствие характеристик автокорреляционных функций, проиллюстрированных, в качестве неограничивающих примеров, на фиг.8-9.
Фиг.9 является схемой, иллюстрирующей автокорреляционную функцию для элементарных сигналов первой половины кодовой последовательности в сигнале BOC(1,1). Как упомянуто выше, другие примеры могут выполнять автокорреляционные функции для второй половины элементарных сигналов для кодовой последовательности сигнала BOC(1,1). Как можно видеть на фиг.9, автокорреляционная функция для первой половины элементарных сигналов для кодовой последовательности сигнала BOC(1,1) имеет два пика, каждый с величиной в 0,5 величины пика для максимальной пиковой амплитуды традиционной автокорреляционной функции BOC, поясненной выше в связи с фиг.7-8. Один признак автокорреляционной функции по фиг.9 заключается в том, что передние фронты двух пиков имеют различные (по абсолютному значению) наклоны. Следует отметить, что передний фронт пика, расположенный со смещением элементарного сигнала в -0,5, имеет наклон 1, в то время как передний фронт пика, расположенный со смещением элементарного сигнала в 0, имеет наклон 2.
Характеристики автокорреляционной функции по фиг.9 позволяют предоставлять улучшенное обнаружение многолучевых сигналов. Например, отличающиеся наклоны передних фронтов двух пиков автокорреляционной функции могут приводить к изменениям относительных амплитуд и/или относительных местоположений двух пиков при наличии многолучевого сигнала. Два пика в идеальном случае при отсутствии многолучевых сигналов имеют равные амплитуды в абсолютных значениях и разделены на расстояние в 0,5 элементарного сигнала. Изменения относительной амплитуды и относительного разделения при наличии одного или более многолучевых сигналов позволяют предоставлять информацию, полезную при обнаружении и/или оценке ошибки многолучевого распространения. Согласно другому примеру, поскольку два импульса автокорреляционной функции по фиг.9 инвертируются относительно друг друга, точка перехода через нуль (при смещении элементарного сигнала в -0,25, согласно этому примеру) может иметь тенденцию перемещаться при наличии одного или более многолучевых сигналов. Изменение перехода через нуль позволяет предоставлять информацию, полезную для обнаружения и/или оценки ошибки многолучевого распространения.
Фиг.10 является схемой, иллюстрирующей автокорреляционную функцию (составной сигнал 1005) для первой половины каждого элементарного сигнала прямого сигнала 1001 BOC(1,1), комбинированного с многолучевым сигналом 1003 с положительной полярностью. Как можно видеть, вследствие эффектов многолучевого сигнала 1003, автокорреляционная функция для составного сигнала 1005 в этом примере имеет два пика с отличающимися амплитудами. Отличающиеся амплитуды могут анализироваться, чтобы предоставлять оценку и/или обнаружение ошибок многолучевого распространения. Как также можно видеть, вследствие эффектов многолучевого сигнала 1003, переход через нуль для составного сигнала 1005 перемещается от -0,25 к значению ближе к 0. Изменение в переходе через нуль может анализироваться либо отдельно, либо, возможно, вместе с отличающимися пиковыми амплитудами, чтобы предоставлять оценку и/или обнаружение ошибок многолучевого распространения. Многолучевой сигнал 1003, согласно этому примеру, является версией с задержанной и уменьшенной амплитудой прямого сигнала 1001.
Хотя многолучевой сигнал 1003, согласно этому примеру, проиллюстрирован как имеющий положительную полярность относительно прямого сигнала 1001, возможно то, что многолучевые сигналы поступают в приемное устройство с полярностью, противоположной полярности прямого сигнала. Для случая, когда многолучевой сигнал имеет полярность, противоположную полярности прямого сигнала, результирующий составной сигнал должен иметь уменьшенную амплитуду относительно прямого сигнала вследствие подавления, вызываемого многолучевым сигналом с отрицательной полярностью.
В дополнение к выполнению оценки и/или обнаружения ошибок многолучевого распространения через автокорреляцию BOC(1,1), как описано выше в связи с фиг.7-8, или выполнению оценки и/или обнаружения через корреляцию в первой половине, описанному в связи с фиг.9-10, другие примеры могут использовать комбинацию обоих подходов. Согласно одному примеру, разности в передних фронтах этих двух пиков побочных максимумов в корреляции, описанной выше в связи с фиг.7-8, позволяют предоставлять информацию оценки и/или обнаружения, которая может использоваться вместе с информацией, исходящей в результате отличающихся наклонов передних фронтов двух пиков автокорреляционной функции, описанной в связи с фиг.9-10. В одном аспекте изменения относительной амплитуды и/или относительного разделения различных пиков для двух способов корреляции могут быть использованы вместе с изменениями, отмеченными в точках перехода через нуль для двух технологий корреляции, чтобы оценивать и/или обнаруживать ошибку многолучевого распространения. Использование дополнительных различимых признаков, доступных при использовании комбинации технологий корреляции, позволяет предоставлять дополнительную информацию, чтобы более просто, более точно и/или иным образом повышать способность обнаруживать и/или оценивать ошибку многолучевого распространения.
Фиг.11 является блок-схемой последовательности операций примерного способа для автокорреляции BOC-сигнала посредством комбинирования корреляционной функции для первой половины элементарных сигналов для кодовой последовательности BOC-сигнала и корреляционной функции для второй половины каждого из элементарных сигналов для кодовой последовательности BOC-сигнала. На этапе 1110 сигнал, содержащий, по меньшей мере, один сигнал модуляции бинарной смещенной несущей (BOC), принимается, причем сигнал BOC-модуляции модулируется с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из элементарных сигналов имеет заданный интервал. На этапе 1120 принимаемый сигнал коррелируется с первыми частями множества элементарных сигналов, чтобы предоставлять первый сигнал мощности. Первые части элементарных сигналов содержат первую половину каждого из множества элементарных сигналов, при этом первые части меньше заданного интервала. На этапе 1130 принимаемый сигнал коррелируется со вторыми частями множества элементарных сигналов, чтобы предоставлять второй сигнал мощности. Вторые части элементарных сигналов содержат вторую половину каждого из множества элементарных сигналов, при этом вторые части меньше заданного интервала. На этапе 1140 первые и вторые сигналы мощности комбинируются, чтобы формировать составной сигнал мощности. На этапе 1150 наличие многолучевого сигнала обнаруживается в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик составного сигнала мощности.
Согласно этому примеру, комбинирование первых и вторых сигналов мощности может содержать суммирование сигналов мощности. Согласно другому примеру, эти два сигнала мощности могут вычитаться друг из друга. Дополнительно, две операции корреляции могут выполняться одновременно, по меньшей мере, частично. Согласно другим примерам, операции корреляции могут выполняться поочередно. Способ в соответствии с заявленным предметом изобретения может включать в себя все, более чем все или менее чем все из этапов 1110-1150. Кроме того, порядок этапов 1110-1150 является просто одним примерным порядком, и объем заявленного предмета изобретения не ограничен в этом отношении.
Фиг.12 является схемой, иллюстрирующей корреляцию BOC-сигнала посредством суммирования корреляционной функции с автокорреляцией для первой половины элементарных сигналов для кодовой последовательности BOC-сигнала с корреляционной функцией с автокорреляцией для второй половины элементарных сигналов для кодовой последовательности BOC-сигнала. Автокорреляционные функции могут выполняться способом, аналогичным способу, поясненному выше в связи с фиг.9-11. Согласно примеру, автокорреляционная функция выполняется в первой половине каждого из множества элементарных сигналов сигнала BOC(1,1), тем самым формируя функцию, аналогичную функции, показанной в верхней части фиг.12. Дополнительная автокорреляция выполняется во второй половине каждого из множества элементарных сигналов сигнала BOC(1,1), формируя функцию, аналогичную функции, показанной в середине фиг.12. Автокорреляция первых половин элементарных сигналов может предшествовать автокорреляции вторых половин элементарных сигналов, или порядок выполнения может быть изменен на противоположный. Другие примеры могут предусматривать параллельные процессы автокорреляции для первых и вторых половин элементарных сигналов.
Поскольку периоды корреляции между первыми половинами элементарных сигналов и вторыми половинами элементарных сигналов не перекрываются, две функции могут суммироваться без добавления какого-либо дополнительного шума. Форма сигнала, являющаяся результатом суммирования автокорреляционных функций для первых и вторых половин элементарных сигналов, проиллюстрирована в нижней части фиг.12. Следует отметить, что форма сигнала в нижней части фиг.12 аналогична автокорреляции BOC(1,1), описанной выше в связи с фиг.8. Посредством отдельной обработки этих двух половин и последующего их комбинирования может быть возможным использовать более простые и/или более эффективные процессы автокорреляции, чем в противном случае может быть возможным при традиционных операциях автокорреляции BOC(1,1).
Фиг.13 является схемой, иллюстрирующей корреляцию BOC-сигнала посредством вычитания корреляционной функции для второй половины элементарных сигналов для кодовой последовательности BOC-сигнала из корреляционной функции для первой половины элементарных сигналов для кодовой последовательности BOC-сигнала. Автокорреляционные функции, согласно этому примеру, могут выполняться способом, аналогичным способу, поясненному выше в связи с фиг.9-11. Согласно примеру, автокорреляционная функция выполняется в первой половине каждого из элементарных сигналов для кодовой последовательности сигнала BOC(1,1), тем самым формируя функцию, аналогичную функции, показанной в верхней части фиг.13 (см. также верхнюю форму сигнала, показанную на фиг.12). Дополнительная автокорреляция выполняется во второй половине элементарных сигналов для кодовой последовательности сигнала BOC(1,1), формируя функцию, аналогичную функции, показанной в середине фиг.13 (см. также форму сигнала, проиллюстрированную в середине фиг.12). Автокорреляция первых половин элементарных сигналов может предшествовать автокорреляции вторых половин элементарных сигналов, или порядок выполнения может быть изменен на противоположный. Другие примеры могут предусматривать параллельные процессы автокорреляции для первых и вторых половин элементарных сигналов.
Как в примере по фиг.12, поскольку периоды корреляции между первыми половинами элементарных сигналов и вторыми половинами элементарных сигналов не перекрываются, две автокорреляционные функции, проиллюстрированные сверху и в середине фиг.13, могут быть комбинированы без добавления дополнительного шума. Согласно этому примеру, автокорреляционная функция для вторых половин элементарных сигналов вычитается из автокорреляционной функции для первых половин элементарных сигналов. Форма сигнала, являющаяся результатом вычитания, проиллюстрирована в нижней части фиг.13. Посредством отдельной обработки этих двух половин и последующего их комбинирования может быть возможным использовать более простые и/или более эффективные процессы автокорреляции, чем в противном случае может быть возможным при традиционных операциях автокорреляции BOC(1,1).
Операция корреляции, описанная выше в связи с фиг.13, приводит к результату, аналогичному тому, который можно получать посредством обработки сигнала BOC(1,1) с сигналом не-BOC(1,1). Получаются два пика с идентичными наклонами переднего фронта и идентичными амплитудами. Из этих характеристик может быть трудным определять ошибку многолучевого распространения, поскольку пики могут подвергаться идентичному эффекту от ближайшего многолучевого сигнала. Тем не менее, на точку перехода через нуль может оказываться влияние, и обнаружение и/или оценка многолучевого распространения может выполняться с использованием информации перехода через нуль. Это предоставляет дополнительный способ для того, чтобы оценивать и/или обнаруживать многолучевое распространение. Дополнительно, идентичная автокорреляционная функция может получаться, если модуляция BOC(1,1) применяется к входящему GPS- или другому не-BOC-сигналу. Таким образом, ошибка многолучевого распространения может обнаруживаться и/или оцениваться с помощью информации, исходящей из перехода через нуль для GPS- или других не-BOC-сигналов.
Фиг.14 является примером системы для обнаружения периодически повторяющихся сигналов от спутников. Тем не менее, это просто пример системы, которая допускает обнаружение таких сигналов, и другие системы могут использоваться без отступления от заявленного предмета изобретения. Как проиллюстрировано на фиг.14, эта система может содержать вычислительную платформу 1400, включающую в себя процессор 1410, запоминающее устройство 1420 и коррелятор 1430. Коррелятор 1430 может быть выполнен с возможностью формировать корреляционные функции из сигналов, предоставленных приемным устройством (не показано), которые должны обрабатываться процессором 1410 или напрямую, и/или через запоминающее устройство 1420. Коррелятор 1430 может быть реализован в любой комбинации аппаратных средств, программного обеспечения и/или микропрограммного обеспечения. Тем не менее, это просто примеры того, как коррелятор может быть реализован, и заявленный предмет изобретения не ограничен в этих отношениях.
Согласно примеру, запоминающее устройство 1420 может хранить машиночитаемые инструкции, которые являются доступными и выполнимыми процессором 1410, чтобы предоставлять, по меньшей мере, часть вычислительной платформы. Здесь процессор 1410 в комбинации с такими машиночитаемыми инструкциями может быть выполнен с возможностью осуществлять все или части процессов, поясненных в данном документе. В конкретном примере, хотя заявленный предмет изобретения не ограничен в этих отношениях, процессор 1410 может направлять коррелятор 1430 так, чтобы выполнять поиск сигналов определения положения, как проиллюстрировано выше, и извлекать измерения из корреляционных функций, сформированных коррелятором 1430.
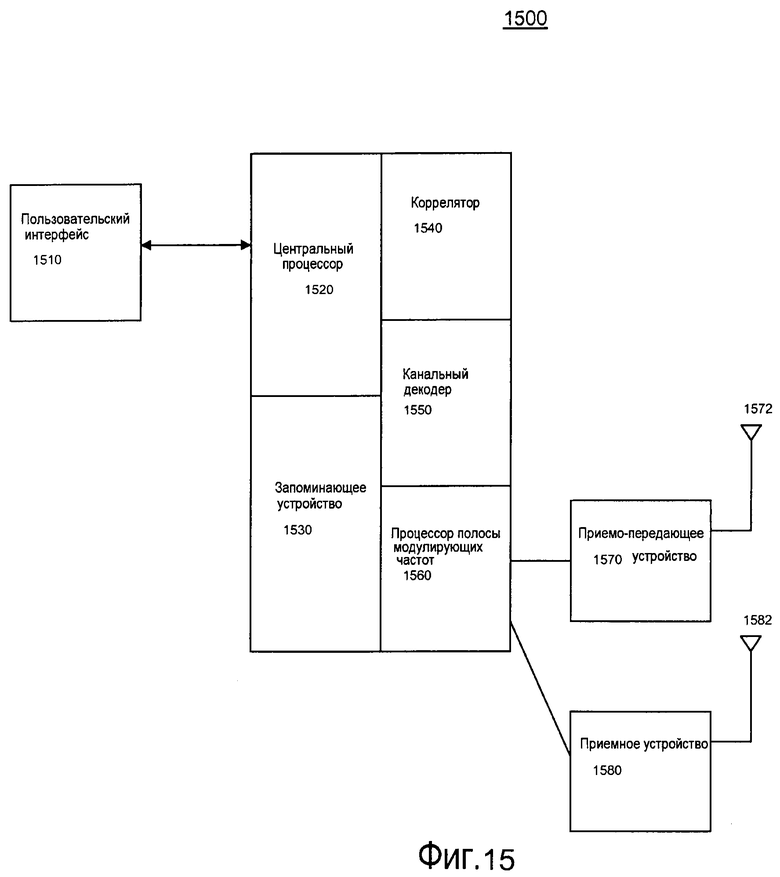
Фиг.15 является блок-схемой примерной абонентской станции 1500. Радиоприемо-передающее устройство 1570 может быть выполнено с возможностью модулировать сигнал RF-несущей информацией полосы модулирующих частот, такой как речь или данные, на RF-несущую и демодулировать модулированную RF-несущую, чтобы получать такую информацию полосы модулирующих частот. Антенна 1572 может быть выполнена с возможностью передавать модулированную несущую RF-частоту по линии беспроводной связи и принимать модулированную несущую RF-частоту по линии беспроводной связи.
Процессор 1560 полосы модулирующих частот может быть выполнен с возможностью предоставлять информацию полосы модулирующих частот из центрального процессора (CPU) 1520 в приемо-передающее устройство 1570 для передачи по линии связи беспроводной связи. Здесь CPU 1520 может получать эту информацию полосы модулирующих частот из устройства ввода в рамках пользовательского интерфейса 1510. Процессор 1560 полосы модулирующих частот также может быть выполнен с возможностью предоставлять информацию полосы модулирующих частот из приемо-передающего устройства 1570 в CPU 1520 для передачи через устройство вывода в рамках пользовательского интерфейса 1510.
Пользовательский интерфейс 1510 может содержать множество устройств для ввода или вывода пользовательской информации, такой как голос или данные. Такие устройства могут включать в себя, в качестве неограничивающих примеров, клавиатуру, экран дисплея, микрофон и динамик.
Приемное устройство 1580 может быть выполнено с возможностью принимать и демодулировать передачи от спутников и предоставлять демодулированную информацию в коррелятор 1540. Коррелятор 1540 может быть выполнен с возможностью извлекать корреляционные функции, например, как проиллюстрировано выше в отношении (1), из информации, предоставленной приемным устройством 1580. Для данного PRN-кода, например, коррелятор 1540 может формировать корреляционную функцию, заданную в диапазоне временных сдвигов кода, чтобы устанавливать окно поиска временных сдвигов кода, и в диапазоне гипотез доплеровской частоты, как описано в данном документе. По сути, отдельная корреляция может быть выполнена в соответствии с заданными параметрами когерентного и некогерентного интегрирования. Коррелятор 1540 также может быть выполнен с возможностью извлекать связанные с пилотными сигналами корреляционные функции из информации, связанной с пилотными сигналами, предоставленными приемо-передающим устройством 1570. Эта информация может использоваться абонентской станцией для того, чтобы получать услуги беспроводной связи. Канальный декодер 1550 может быть выполнен с возможностью декодировать канальные символы, принимаемые из процессора 1560 полосы модулирующих частот, в базовые исходные биты. В одном примере, когда канальные символы содержат сверточно-кодированные символы, такой канальный декодер может содержать декодер Витерби. Во втором примере, когда канальные символы содержат последовательные или параллельные конкатенации сверточных кодов, канальный декодер 1550 может содержать турбодекодер.
Запоминающее устройство 1530 может быть выполнено с возможностью хранить машиночитаемые инструкции, которые являются исполняемыми, для того чтобы осуществлять один или более из процессов, реализаций или примеров, которые описываются или предлагаются в данном документе. CPU 1520 может быть выполнен с возможностью осуществлять доступ и приводить в исполнение эти машиночитаемые инструкции. Через выполнение этих машиночитаемых инструкций CPU 1520 может направлять коррелятор 1540 так, чтобы анализировать корреляционные функции, предоставленные посредством коррелятора 1540, извлекать измерения из их пиков и определять то, в достаточной или недостаточной степени точной является оценка местоположения. Тем не менее, это просто примеры задач, которые могут быть выполнены CPU, и заявленный предмет изобретения не ограничен в этих отношениях.
Хотя проиллюстрировано и пояснено то, что в настоящее время рассматривается в качестве примерных признаков, специалисты в данной области техники должны понимать, что различные другие модификации должны быть выполнены и эквиваленты могут быть заменены без отступления от заявленного предмета изобретения. Дополнительно, множество модификаций может быть выполнено для того, чтобы приспосабливать ситуацию к идеям настоящего изобретения без отступления от центральной изобретаемой идеи, описанной в данном изобретении. Следовательно, имеется намерение, что заявленный предмет изобретения не ограничен конкретными раскрытыми примерами, а этот заявленный предмет изобретения также может включать в себя все реализации, попадающие в объем прилагаемой формулы изобретения и ее эквивалентов.











Изобретение относится к спутниковой системе определения местоположения (SPS), предназначено для обнаружения и/или оценки многолучевых сигналов и позволяет повысить точность измерения псевдодальности и координат местоположения приемного устройства. Изобретение раскрывает, в частности, способ оценки многолучевых компонентов, согласно которому принимают сигнал, содержащий, по меньшей мере, один сигнал модуляции бинарной смещенной несущей (ВОС). Сигнал ВОС-модуляции модулируют с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из упомянутых элементарных сигналов имеет установленный интервал. В другом аспекте принимают сигнал, который коррелируется с частями множества элементарных сигналов, чтобы предоставлять сигнал мощности. Части элементарных сигналов меньше установленного интервала. В дополнительном аспекте обнаруживается наличие многолучевого сигнала в принимаемом сигнале. Обнаружение многолучевого распространения, по меньшей мере, частично основано на одной или более характеристик сигнала мощности. 9 н. и 29 з.п. ф-лы, 15 ил.
1. Способ для детектирования и/или оценки многолучевых компонентов, содержащий этапы, на которых:
- принимают сигнал, содержащий, по меньшей мере, один сигнал модуляции бинарной смещенной несущей (ВОС), причем упомянутый сигнал ВОС-модуляции модулируется с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из упомянутых элементарных сигналов имеет установленный интервал;
- коррелируют упомянутый принимаемый сигнал с частями упомянутого множества элементарных сигналов, причем упомянутые части упомянутых элементарных сигналов меньше или равны упомянутому установленному интервалу, чтобы предоставлять сигнал мощности; и
обнаруживают наличие многолучевого сигнала в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик упомянутого сигнала мощности.
2. Способ по п.1, в котором упомянутая корреляция упомянутого принимаемого сигнала с частями упомянутого множества элементарных сигналов содержит этап, на котором коррелируют упомянутый принимаемый сигнал с частями, содержащими приблизительно первую половину каждого из множества элементарных сигналов.
3. Способ по п.1, в котором упомянутая корреляция упомянутого принимаемого сигнала с частями упомянутого множества элементарных сигналов содержит этап, на котором коррелируют упомянутый принимаемый сигнал с частями, содержащими приблизительно вторую половину каждого из множества элементарных сигналов.
4. Способ по п.1, в котором сигнал модуляции бинарной смещенной несущей содержит сигнал ВОС(1,1).
5. Способ по п.1, в котором упомянутый прием сигнала содержит этап, на котором принимают сигнал, по меньшей мере, частично от спутника.
6. Способ по п.5, в котором спутник содержит Galileo-спутник.
7. Способ по п.1, в котором упомянутый прием сигнала содержит этап, на котором принимают сигнал в абонентской станции.
8. Способ по п.1, в котором упомянутое обнаружение наличия многолучевого сигнала содержит этап, на котором вычисляют разность в амплитуде между двумя или более пиками упомянутого сигнала мощности.
9. Способ по п.1, в котором упомянутое обнаружение наличия многолучевого сигнала содержит этап, на котором вычисляют расстояние между двумя или более пиками упомянутого сигнала мощности.
10. Способ по п.1, в котором упомянутое обнаружение наличия многолучевого сигнала содержит этап, на котором вычисляют изменение в точке перехода через нуль сигнала мощности.
11. Способ по п.1, дополнительно содержащий этап, на котором оценивают многолучевой сигнал, по меньшей мере, частично на основе одной или более характеристик упомянутого сигнала мощности.
12. Способ по п.11, в котором упомянутая оценка многолучевого сигнала содержит этап, на котором вычисляют разность в амплитуде между двумя пиками упомянутого сигнала мощности.
13. Способ по п.11, в котором упомянутая оценка многолучевого сигнала содержит этап, на котором вычисляют расстояние между двумя или более пиками упомянутого сигнала мощности.
14. Способ по п.11, в котором упомянутая оценка многолучевого сигнала содержит этап, на котором вычисляют изменение в точке перехода через нуль сигнала мощности.
15. Способ для детектирования и/или оценки многолучевых компонентов, содержащий этапы, на которых:
- принимают сигнал, модулированный с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из упомянутых элементарных сигналов имеет установленный интервал;
- коррелируют упомянутый принимаемый сигнал с первыми частями упомянутого множества элементарных сигналов, при этом упомянутые первые части упомянутых элементарных сигналов содержат первую половину каждого из множества элементарных сигналов, причем упомянутые первые части меньше упомянутого установленного интервала, чтобы предоставлять первый сигнал мощности;
- коррелируют упомянутый принимаемый сигнал со вторыми частями упомянутого множества элементарных сигналов, при этом упомянутые вторые части упомянутых элементарных сигналов содержат вторую половину каждого из множества элементарных сигналов, причем упомянутые вторые части меньше упомянутого установленного интервала, чтобы предоставлять второй сигнал мощности;
- комбинируют первый и второй сигналы мощности, чтобы формировать составной сигнал мощности; и
- обнаруживают наличие многолучевого сигнала в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик упомянутого составного сигнала мощности.
16. Способ по п.15, в котором упомянутое комбинирование первого и второго сигналов мощности содержит этап, на котором суммируют первый и второй сигналы мощности.
17. Способ по п.15, в котором упомянутое комбинирование первого и второго сигналов мощности содержит этап, на котором вычитают один из первого и второго сигналов мощности из другого первого и второго сигналов мощности.
18. Способ по п.15, в котором упомянутая корреляция упомянутого сигнала с первыми частями упомянутого множества элементарных сигналов выполняется одновременно с упомянутой корреляцией упомянутого сигнала со вторыми частями упомянутого множества элементарных сигналов.
19. Способ для детектирования и/или оценки многолучевых компонентов, содержащий этапы, на которых:
- принимают сигнал, модулированный с помощью псевдослучайной шумовой последовательности;
- коррелируют упомянутый принимаемый сигнал с сигналом ВОС(1,1), чтобы предоставлять сигнал мощности; и
- обнаруживают и/или оценивают наличие многолучевого сигнала в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик упомянутого сигнала мощности.
20. Способ по п.19, в котором упомянутое обнаружение и/или оценка наличия многолучевого сигнала содержит этап, на котором вычисляют изменение в точке перехода через нуль сигнала мощности.
21. Изделие, содержащее:
- носитель данных, причем упомянутый носитель данных содержит машиночитаемые инструкции, хранимые на нем, которые, при исполнении вычислительной платформой, выполнены с возможностью заставлять упомянутую вычислительную платформу:
- принимать сигнал, содержащий, по меньшей мере, один сигнал модуляции бинарной смещенной несущей (ВОС), причем упомянутый сигнал ВОС-модуляции модулируется с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из упомянутых элементарных сигналов имеет установленный интервал;
- коррелировать упомянутый принимаемый сигнал с частями упомянутого множества элементарных сигналов, причем упомянутые части упомянутых элементарных сигналов меньше или равны упомянутому установленному интервалу, чтобы предоставлять сигнал мощности; и
- обнаруживать и/или оценивать наличие многолучевого сигнала в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик упомянутого сигнала мощности.
22. Изделие по п.21, в котором упомянутая корреляция упомянутого принимаемого сигнала с частями упомянутого множества элементарных сигналов содержит корреляцию упомянутого принимаемого сигнала с частями, содержащими приблизительно первую половину каждого из множества элементарных сигналов.
23. Изделие по п.21, в котором упомянутая корреляция упомянутого принимаемого сигнала с частями упомянутого множества элементарных сигналов содержит корреляцию упомянутого принимаемого сигнала с частями, содержащими приблизительно вторую половину каждого из множества элементарных сигналов.
24. Изделие по п.21, в котором упомянутое обнаружение и/или оценка наличия многолучевого сигнала содержит вычисление разности в амплитуде между двумя или более пиками упомянутого сигнала мощности.
25. Изделие по п.21, в котором упомянутое обнаружение и/или оценка наличия многолучевого сигнала содержит вычисление расстояния между двумя или более пиками упомянутого сигнала мощности.
26. Изделие по п.21, в котором упомянутое обнаружение и/или оценка наличия многолучевого сигнала содержит вычисление изменения в точке перехода через нуль сигнала мощности.
27. Изделие, содержащее:
- носитель данных, причем упомянутый носитель данных содержит машиночитаемые инструкции, хранимые на нем, которые, при исполнении вычислительной платформой, выполнены с возможностью заставлять упомянутую вычислительную платформу:
- принимать сигнал, модулированный с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из упомянутых элементарных сигналов имеет установленный интервал;
- коррелировать упомянутый принимаемый сигнал с первыми частями упомянутого множества элементарных сигналов, при этом упомянутые первые части упомянутых элементарных сигналов содержат первую половину каждого из множества элементарных сигналов, причем упомянутые первые части меньше упомянутого установленного интервала, чтобы предоставлять первый сигнал мощности;
- коррелировать упомянутый принимаемый сигнал со вторыми частями упомянутого множества элементарных сигналов, при этом упомянутые вторые части упомянутых элементарных сигналов содержат вторую половину каждого из множества элементарных сигналов, причем упомянутые вторые части меньше упомянутого установленного интервала, чтобы предоставлять второй сигнал мощности;
- комбинировать первый и второй сигналы мощности, чтобы формировать составной сигнал мощности; и
- обнаруживать и/или оценивать наличие многолучевого сигнала в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик упомянутого составного сигнала мощности.
28. Изделие, содержащее:
- носитель данных, причем упомянутый носитель данных содержит машиночитаемые инструкции, хранимые на нем, которые, при исполнении вычислительной платформой, выполнены с возможностью заставлять упомянутую вычислительную платформу:
- принимать сигнал, модулированный с помощью псевдослучайной шумовой последовательности;
- коррелировать упомянутый принимаемый сигнал с сигналом ВОС(1,1), чтобы предоставлять сигнал мощности; и
- обнаруживать и/или оценивать наличие многолучевого сигнала в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик упомянутого сигнала мощности.
29. Изделие по п.28, в котором упомянутое обнаружение и/или оценка наличия многолучевого сигнала содержит вычисление изменения в точке перехода через нуль сигнала мощности.
30. Абонентская станция, содержащая:
- приемное устройство, чтобы принимать сигнал, содержащий, по меньшей мере, один сигнал модуляции бинарной смещенной несущей (ВОС), причем упомянутый сигнал ВОС-модуляции модулируется с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из упомянутых элементарных сигналов имеет установленный интервал; и
- коррелятор, чтобы коррелировать, по меньшей мере, частично упомянутый принимаемый сигнал с частями упомянутого множества элементарных сигналов, причем упомянутые части упомянутых элементарных сигналов меньше или равны упомянутому установленному интервалу, чтобы предоставлять сигнал мощности;
- при этом упомянутая абонентская станция дополнительно выполнена с возможностью обнаруживать и/или оценивать наличие многолучевого сигнала в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик упомянутого сигнала мощности.
31. Абонентская станция по п.30, в которой упомянутый коррелятор дополнительно выполнен с возможностью коррелировать упомянутый принимаемый сигнал с частями упомянутого множества элементарных сигналов посредством корреляции упомянутого принимаемого сигнала с частями, содержащими приблизительно первую половину каждого из множества элементарных сигналов.
32. Абонентская станция по п.30, в которой упомянутый коррелятор дополнительно выполнен с возможностью коррелировать упомянутый принимаемый сигнал с частями упомянутого множества элементарных сигналов посредством корреляции упомянутого принимаемого сигнала с частями, содержащими приблизительно вторую половину каждого из множества элементарных сигналов.
33. Абонентская станция по п.30, при этом упомянутая абонентская станция дополнительно выполнена с возможностью обнаруживать и/или оценивать наличие многолучевого сигнала посредством вычисления разности в амплитуде между двумя или более пиками упомянутого сигнала мощности.
34. Абонентская станция по п.30, при этом упомянутая абонентская станция дополнительно выполнена с возможностью обнаруживать и/или оценивать наличие многолучевого сигнала посредством вычисления расстояния между двумя или более пиками упомянутого сигнала мощности.
35. Абонентская станция по п.30, при этом упомянутая абонентская станция дополнительно выполнена с возможностью обнаруживать и/или оценивать наличие многолучевого сигнала посредством вычисления изменения в точке перехода через нуль сигнала мощности.
36. Абонентская станция, содержащая:
- приемное устройство, чтобы принимать сигнал, модулированный с помощью псевдослучайной шумовой последовательности, содержащей множество элементарных сигналов, при этом каждый из упомянутых элементарных сигналов имеет установленный интервал; и
- коррелятор, чтобы коррелировать, по меньшей мере, частично упомянутый принимаемый сигнал с первыми частями упомянутого множества элементарных сигналов, при этом упомянутые первые части упомянутых элементарных сигналов содержат первую половину каждого из множества элементарных сигналов, причем упомянутые первые части меньше упомянутого установленного интервала, чтобы предоставлять первый сигнал мощности, при этом коррелятор дополнительно выполнен с возможностью коррелировать, по меньшей мере, частично упомянутый принимаемый сигнал со вторыми частями упомянутого множества элементарных сигналов, при этом упомянутые вторые части упомянутых элементарных сигналов содержат вторую половину каждого из множества элементарных сигналов, причем упомянутые вторые части меньше упомянутого установленного интервала, чтобы предоставлять второй сигнал мощности,
- при этом упомянутая абонентская станция выполнена с возможностью комбинировать первый и второй сигналы мощности, чтобы формировать составной сигнал мощности, и при этом упомянутая абонентская станция дополнительно выполнена с возможностью обнаруживать и/или оценивать наличие многолучевого сигнала в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик упомянутого составного сигнала мощности.
37. Абонентская станция, содержащая:
- приемное устройство, чтобы принимать сигнал, модулированный с помощью псевдослучайной шумовой последовательности; и
- коррелятор, чтобы коррелировать упомянутый принимаемый сигнал с сигналом ВОС(1,1), чтобы предоставлять сигнал мощности,
- при этом упомянутая абонентская станция выполнена с возможностью обнаруживать и/или оценивать наличие многолучевого сигнала в упомянутом принимаемом сигнале, по меньшей мере, частично на основе одной или более характеристик упомянутого сигнала мощности.
38. Абонентская станция по п.37, при этом упомянутая абонентская станция дополнительно выполнена с возможностью обнаруживать и/или оценивать наличие многолучевого сигнала посредством вычисления изменения в точке перехода через нуль сигнала мощности.
| US 2007258511 A1, 08.11.2007 | |||
| СПОСОБ ПОИСКА МНОГОЛУЧЕВОГО ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ, СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАЗМЕРА КЛАСТЕРА СИГНАЛОВ ЛУЧЕЙ И БЛОК, ЕГО РЕАЛИЗУЮЩИЙ | 2001 |
|
RU2208916C1 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА | 2000 |
|
RU2168274C1 |
| FERNANDO D.NUNES, FERNANDO M.G.SOUSA, JOSE M.N.LEITAO | |||
| Multipath Mitigation technique for BOC Signals Using Gating Functions, ESA WORKSHOP ON SATELLITE NAVIGATION USER EQUIPMENT TECHNOLOGIES, NAVITEC' 2004, EUROPEAN SPACE AGENCY, 10.12.2004, XP002532258 | |||
| SOUSA F.M. | |||

