Изобретение относится к области радиолокационной техники и может быть использовано при построении различных радиолокационных или аналогичных систем, предназначенных для определения местоположения летательных аппаратов с использованием радиоволн и управления движением летательных аппаратов.
Для обеспечения навигации летательных аппаратов (ЛА) определяют местоположение ЛА путем измерения их текущих координат. Местоположение ЛА определяют с помощью радиоволн для применения в радиолокационных системах навигации.
В основе радиолокационных систем навигации лежат корреляционно-экстремальные способы навигации (КЭСН), обеспечивающие отыскание и слежение за оптимальным режимом движения ЛА [1]. КЭСН обеспечивают измерение показателей экстремального режима ЛА, обработку указанной информации и выработку управляющего воздействия для коррекции координат местоположения ЛА. Наиболее часто используют картосличительные КЭСН по геофизическим полям, основанные на сравнении текущих карт местности, полученных с использованием радиоволн, с эталонными картами той же местности, априори находящимися на ЛА, в основе которых лежит определение местоположения ЛА с последующим управлением движением ЛА путем коррекции их местоположения. Эталонные карты устанавливают на ЛА до момента начала движения над заданной поверхностью местности, а текущие карты получают во время движения ЛА. По отклонениям эталонных карт местности от текущих в заданной точке траектории движения ЛА определяют отклонение фактической траектории от заданной. В результате сравнения эталонных и текущих карт местности вырабатывают поправки в координаты ЛА для управления движением путем коррекции местоположения ЛА.
Сравнение эталонной и текущей карт осуществляется на основе вычисления функционалов, достигающих глобального экстремума при полном совмещении изображений указанных карт. Для обработки полученной при движении ЛА информации используют разностные алгоритмы, основанные на вычислении разностей измеренных высот текущей карты.
Известен способ навигации летательных аппаратов [2], использующийся в корреляционно-экстремальных системах навигации и заключающийся в определения местоположения ЛА с использованием радиоволн, излучаемых в виде одного луча (далее: радиоволн в виде луча), позволяющий снимать информацию в текущей точке.
Реализация способа [2] заключается в следующем.
Используют информацию эталонной карты местности о навигационном поле земли, которая до начала движении находится на ЛА.
Выбирают участок местности (мерный участок), который определяется величиной допустимых отклонений ЛА по дальности (квадрат неопределенности).
Измеряют с использованием одного луча радиоволн значения высот  (индекс «т» принадлежит текущей карте) от ЛА до рельефа мерного участка в i точках (i=1, 2, 3,...N) траектории движения ЛА (трассы
(индекс «т» принадлежит текущей карте) от ЛА до рельефа мерного участка в i точках (i=1, 2, 3,...N) траектории движения ЛА (трассы  ).
).
После прохождения ЛА мерного участка вычисляют отклонения  высот , измеренные с помощью радиоволн, от высот Hoi, измеренных бародатчиком (абсолютная высота), в точках i траектории движения ЛА
высот , измеренные с помощью радиоволн, от высот Hoi, измеренных бародатчиком (абсолютная высота), в точках i траектории движения ЛА

Составляют для мерного участка текущую карту на основе вычисленных высот рельефа после прохождения мерного участка, то есть получают карту высот рельефа мерного участка (плановые координаты мерного участка), для составления которой используют данные о скорости ЛА и углах эволюции (тангаж, крен и курс).
Определяют на основе эталонной карты местности трассы  (индекс «э» принадлежит эталонной карте), направленные вдоль мерного участка с шагом j (j=1, 2, 3,...N) поперек мерного участка, соответствующим шагу эталонной карты (плановые координаты эталонной карты).
(индекс «э» принадлежит эталонной карте), направленные вдоль мерного участка с шагом j (j=1, 2, 3,...N) поперек мерного участка, соответствующим шагу эталонной карты (плановые координаты эталонной карты).
Совмещают текущую и эталонную карты исследуемой местности.
Сравнивают текущее  и эталонное
и эталонное  значения путем корреляционно-экстремальной обработки реализации с использованием разностных алгоритмов КЭСН.
значения путем корреляционно-экстремальной обработки реализации с использованием разностных алгоритмов КЭСН.
Вычисляют сигнал коррекции местоположения ЛА по трем координатам на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка.
Управляют движением ЛА путем коррекции его местоположения.
В данном КЭСН траектория движения ЛА разделена на два последовательных участка: измерения и коррекции.
Недостатками способа [2] является следующее.
Выработка сигнала коррекции только после пролета всего мерного участка.
Необходимость измерения абсолютной высоты ЛА над нулевым уровнем Hо эталонной карты, а также необходимы дополнительные вычисления для определения средних уровней высот измеренной карты и эталонной карты. Проведение таких вычислений не позволяет реализовать оперативную обработку данных за время движения ЛА над мерным участком.
Низкая точность составления текущей карты с использованием одного луча, поскольку для измерения высоты до исследуемой местности ширина луча радиоволн должна быть достаточно широкой. При этом снижается точность определения дальности до отдельных точек поверхности и соответственно снижается точность составления текущей карты.
Отсутствие информации о текущем местоположении ЛА в процессе движения над мерным участком, поскольку обработка измеренной информации осуществляется после пролета всего мерного участка.
Известен способ навигации летательных аппаратов [3], выбранный за прототип.
Реализация способа [3] заключается в следующем.
Используют информацию эталонной карты местности о навигационном поле земли, которая до начала движении находится на ЛА.
Выбирают участок местности (мерный участок), который определяется величиной допустимых отклонений ЛА по дальности (квадрат неопределенности).
Излучают радиоволны для измерения параметров мерного участка в виде лучей, количество которых составляет не менее трех и определяется допустимым временем измерения местоположения летательных аппаратов при движении над мерным участком.
Измеряют наклонные дальности до исследуемой поверхности при помощи лучей радиоволн, причем первым излучают луч, расположенный в плоскости, ортогональной плоскости горизонта исследуемой поверхности (первый луч), следующими излучают лучи, направления распространения которых не совпадает с направлением распространения первого луча, причем направления распространения одной части лучей находятся слева (по направлению движения летательного аппарата) от первого луча, а другой части - справа (по направлению движения летательного аппарата) от первого луча, причем количество лучей справа и слева от первого луча одинаковое.
Вычисляют по полученным данным о наклонных дальностях, а также об углах эволюции ЛА координаты точек измерений в системе координат, связанной с ЛА, а также значения высот в этих точках.
Вычисляют местные координаты проекции текущей точки траектории ЛА на плоскость плановых координат.
Определяют разности измерений первого и всех левых лучей, первого и всех правых лучей в текущем измерении, а также вычисляют разности измерений первого луча в текущем измерении и в предыдущем.
Определяют по эталонной карте для каждого возможного положения летательного аппарата внутри квадрата неопределенности (гипотезы) положение координат в каждой точке, для которой рассчитывают высоты рельефа местности на мерном участке.
Определяют разности измерений первого и всех левых лучей, первого и всех правых лучей в текущем измерении, а также вычисляют разности измерений первого луча в текущем измерении и в предыдущем по эталонной карте для каждой гипотезы.
Вычисляют для всех гипотез внутри квадрата неопределенности слагаемые показателя близости.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Выдают поправки к координатам местоположения ЛА в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка.
Управляют движением ЛА путем коррекции его местоположения.
Недостатками способа [3] является следующее.
Определение поправок только в плановых координатах мерного участка - определение местоположения ЛА только по двум координатам.
Низкая точность управления движением ЛА, поскольку отсутствует возможность коррекции местоположения ЛА по трем координатам эталонной карты.
Техническим результатом предлагаемого изобретения является повышение точности способа навигации летательных аппаратов за счет того, что вычисление сигнала коррекции местоположения для управления движением летательных аппаратов с помощью радиоволн осуществляют по трем координатам эталонной карты при движении летательных аппаратов над мерным участком.
Технический результат достигается тем, что в способе навигации летательных аппаратов, заключающемся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью многолучевого режима измерения при помощи радиоволн, излучаемых в виде лучей, определении разности результатов многолучевых измерений, сравнении значений плановых координат текущей и эталонной карт, вычислении сигнала коррекции траектории движения и управлении движением летательных аппаратов путем коррекции их местоположения, коррекцию местоположения летательных аппаратов осуществляют по трем координатам эталонной карты (плановые координаты и высота) в координатах мерного участка за время движения летательных аппаратов над мерным участком, причем после определения местоположения летательных аппаратов в плановых координатах мерного участка вычисляют высоты летательных аппаратов в координатах мерного участка в точке определения местоположения летательных аппаратов в плановых координатах мерного участка как сумму высоты, представляющей собой значение измеренной наклонной дальности, умноженное на косинус угла наклона луча относительно перпендикуляра к поверхности мерного участка, и поправки, определяемой по эталонной карте, представляющей собой разность высот рельефа мерного участка в точке определения наклонной дальности и точке, находящейся на линии перпендикуляра к поверхности мерного участка.
Технический результат достигается тем, что при реализации способа навигации летательных аппаратов используют результаты многолучевых измерений параметров мерного участка при помощи радиоволн по трем координатам эталонной карты: и плановые координаты, и значения высот. Поэтому для формирования сигнала коррекции местоположения ЛА и управления их движением используют не только плановые координаты, но и значения высот мерного участка. В результате способ навигации позволяет корректировать местоположение ЛА при прохождении мерного участка с меньшей погрешностью по сравнению с аналогом и прототипом.
Способ навигации ЛА поясняют следующие чертежи:
- на фигуре 1 представлено взаимное расположение систем координат при движении ЛА;
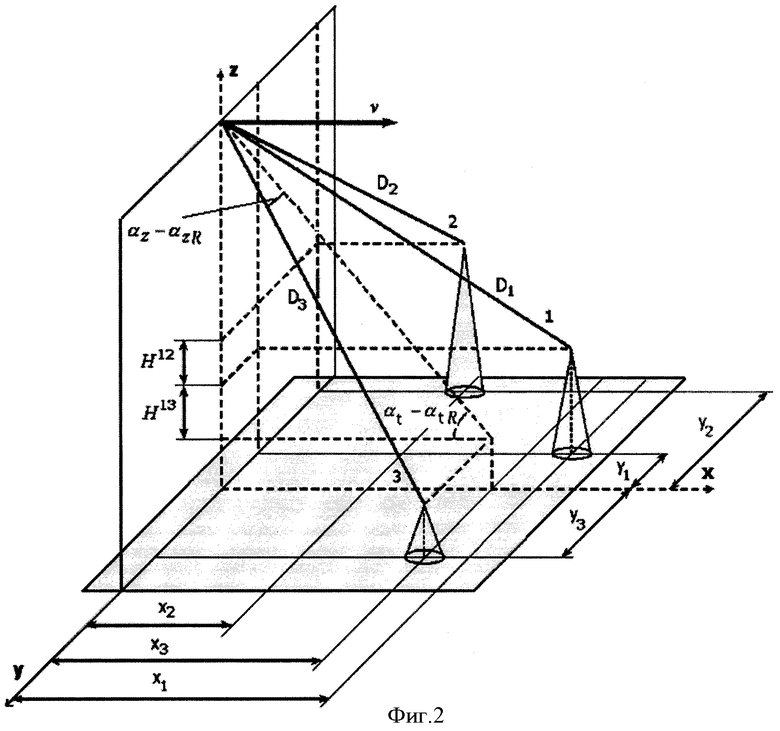
- на фигуре 2 показано измерение наклонной дальности по отдельным лучам радиоволн;
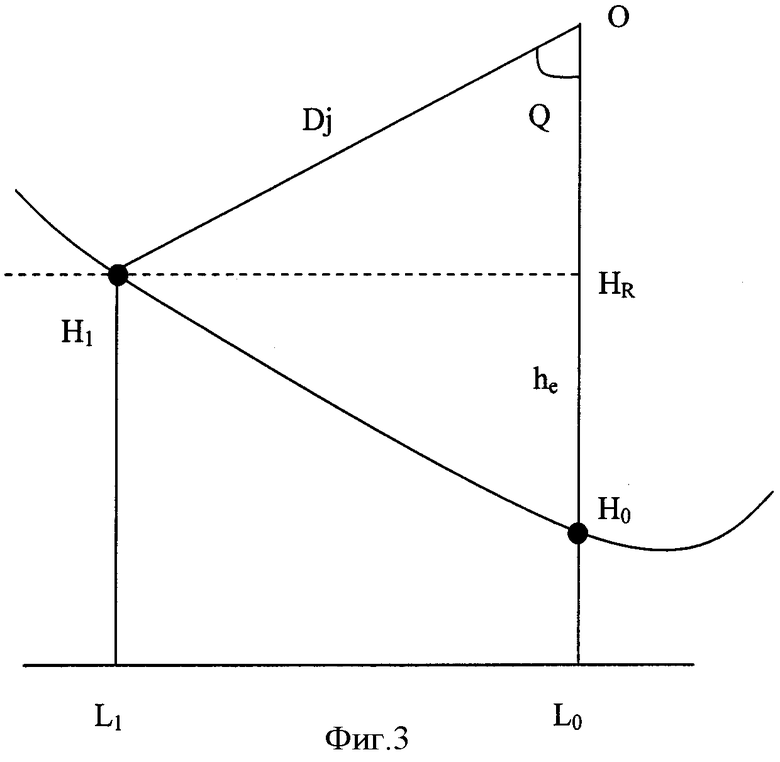
- на фигуре 3 приведено определение значения текущих высот.
Способ навигации ЛА осуществляется следующим образом.
Используют информацию эталонной карты местности, установленной на ЛА до начала движения, о навигационном поле земли.
Выбирают необходимый участок местности эталонной карты, который представляет собой мерный участок и определяется величиной допустимых отклонений ЛА по дальности (квадрат неопределенности).
Составляют текущую карту путем измерения параметров мерного участка с помощью радиоволн. Лучи радиоволн излучают следующим образом. Первым излучают луч, направление распространения которого расположено в плоскости, ортогональной плоскости горизонта мерного участка или в плоскости, которая находится под углом к плоскости горизонта мерного участка (первый луч). Далее излучают лучи, направления распространения которых не совпадают с направлением распространения первого луча, причем направления распространения одной части лучей находятся слева (по направлению движения ЛА) от первого луча, а другой части - справа (по направлению движения ЛА) от первого луча. Количество лучей справа и слева от первого луча одинаковое.
Вычисляют местоположение ЛА в плановых координатах мерного участка на основе измерений с помощью лучей радиоволн наклонных дальностей от ЛА до поверхности мерного участка.
Проводят вычисления, аналогичные описанным выше, по эталонной карте для каждого возможного положения ЛА внутри квадрата неопределенности для каждой гипотезы.
Вычисляют для всех гипотез внутри квадрата неопределенности слагаемые показателя близости.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Определяют поправки к координатам местоположения ЛА в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка.
После определения местоположения ЛА в плановых координатах мерного участка, вычисляют высоту ЛА над поверхностью мерного участка в координатах мерного участка (в точке определения местоположения ЛА в плановых координатах мерного участка) как сумму высоты, представляющей собой значение измеренной наклонной дальности, умноженное на косинус угла наклона луча относительно перпендикуляра к поверхности мерного участка, и поправки, определяемой по эталонной карте, представляющей собой разность высот рельефа мерного участка в точке определения наклонной дальности и точке, находящейся на линии перпендикуляра к поверхности мерного участка.
Выдают поправки к координатам местоположения ЛА в плановых координатах мерного участка по трем координатам.
Управляют движением ЛА путем коррекции их местоположения по трем координатам по мере прохождения мерного участка.
Управление движением ЛА осуществляется в темпе поступления измеренной информации, но с более высокой точностью, поскольку по мере прохождения мерного участка осуществляется коррекция местоположения ЛА по трем координатам: традиционно используемым плановым координатам и введенным в данном случае значениям высот до поверхности мерного участка.
Способ навигации реализуется следующим образом.
Реализацию способа навигации ЛА рассмотрим на примере составления текущей карты с помощью трех лучей радиоволн, расположенных в одной плоскости, которая находится под углом к плоскости горизонта мерного участка.
За время движения над мерным участком определяют текущую карту местности, для составления которой используют данные об измеренных значениях наклонной дальности с помощью лучей радиоволн, а также значения скорости и углах эволюции ЛА (тангаж, крен и курс).
При анализе будем применять следующие системы координат, показанные на фиг.1, для:
- эталонной карты рельефа местности (большой прямоугольник на фиг.1);
- квадрата неопределенности (квадрат на фиг.1);
- возможных положений ЛА внутри квадрата неопределенности в момент начала измерений (точки на фиг.1), и точек траектории ЛА, в которых производят измерения (ромбы на фиг.1).
Местная система координат является левой прямоугольной декартовой системой координат Оrxryrzr с началом Оr. При этом оси Оrxr и Оryr лежат в плоскости местного горизонта, то есть xr и yr являются плановыми координатами ЛА. Относительно плоскости Оrxryr определяют высоты рельефа местности и ЛА. Таким образом, указанные высоты являются соответствующими значениями координаты zr. Начало координат Or выбрано так, что ось Оryr направлена в расчетную точку появления ЛА над участком местности, соответствующим эталонной карте. Ось Oryr считается коллинеарной по отношению к горизонтальной составляющей расчетного вектора скорости ЛА (фиг.1). Плановая система координат неподвижна и связана с эталонной картой.
Для того чтобы привязать плановые координаты к эталонной карте, используют дискретную систему координат. При этом оси Nx и Nу сонаправлены с осями местной системы Оrxryr (фиг.1). Нулевым индексам в дискретной системе координат соответствует левый нижний угол эталонной карты. Предполагаемое значение дискретных координат ЛА в момент начала сбора данных Оr обозначим как (nxrЭ, nуrЭ).
Связь между координатами дискретной и местной систем координат определяется выражениями вида

где ΔЭ - размер ячейки сетки эталонной карты.
При определении координат точек измерений в виде точек пересечения подстилающей поверхности и лучей радиоволн используют систему координат, связанную с текущим положением ЛА. Начало координат этой системы (точка Оа) поместим в текущую точку проекции траектории ЛА на плоскость плановых координат. Ось Оаха по направлению совпадает с текущим направлением вектора скорости ЛА.
Связь между координатами системы, связанной с ЛА, и местной системы координат определяется выражениями

где xrc и yrc - координаты проекции текущего положения ЛА на плоскость плановых координат; αx - курс ЛА в текущей точке измерений (угол между вектором скорости ЛА и осью Оrxr).
Исходными данными для вычислений в КЭСН являются:
- эталонная карта, представляющая собой массив данных о рельефе местности, элементы которого представляют собой высоты рельефа в узлах координатной сетки эталонной карты на плоскости Оrхryr;
- данные, определяемые углом между лучами αR радиоволн;
- данные измерений, отличных от полученных с помощью лучей радиоволн, поступающие с каждым результатом измерений: значения угла αZ крена, угла αх курса, угла αt тангажа, скорости ν ЛА;
- текущая карта, представляющая собой набор значений наклонных дальностей по всем трем лучам, полученных в каждом измерении.
Текущая карта местности определяется матрицей H(nх, nу) размером Nх×Nу, а эталонная карта - матрицей HЭ(nх,nу) размером NxЭ×NуЭ. Дискретные значения nsx и nsy соответствуют горизонтальному и вертикальному смещению текущей карты относительно эталонной и отсчитываются от левого нижнего угла эталонной карты, для которого nsx=nsy=0.
В предлагаемом способе используют дифференциально-разностный алгоритм обработки многолучевых измерений, который рассмотрим на примере трехлучевого КЭСН. Лучи радиоволн излучают последовательно в следующем порядке: первым - центральный луч (по направлению движения ЛА), вторым - левый луч и третьим - правый луч относительно центрального луча.
Используемый алгоритм состоит в определении разности измерений левого и центрального лучей, правого и центрального лучей текущего измерения, а также в вычислении разности измерений центрального луча в текущем измерении и в предыдущем. По эталонной карте для каждой гипотезы определяют положение координат в каждой точке, для которой рассчитывают высоты рельефа местности на мерном участке.
Показатель близости данных получим в виде
где для обозначения разностей измерений применена следующая индексация: верхний индекс 12 означает вычитание результата измерения по первому лучу из результатов измерения по левому, а верхний индекс 32 - вычитание результата по первому лучу из результата по правому, верхний индекс 22 означает результат измерения значения высоты по первому лучу - в данном и в предыдущем измерении.
Обработку данных каждого измерения производят следующим образом.
По полученным данным о наклонных дальностях, а также об углах эволюции вычисляют координаты точек измерений в системе координат, связанной с ЛА.
Вычисляют местные координаты проекции точки траектории ЛА на плоскость плановых координат.
Для каждой гипотезы, то есть для всех возможных положений ЛА внутри квадрата неопределенности, вычисляется одно слагаемое показателя близости.
По завершении всех измерений проводят поиск экстремума показателя близости.
Вычисляют высоту ЛА в координатах мерного участка.
Выдают поправки к координатам местоположения ЛА (по плановым координатам и по высотам).
Рассмотрим данный алгоритм подробно.
По измеренным значениям наклонных дальностей до элементов подстилающей поверхности Dj (j∈[1, 3] - номер луча радиоволн) определяют координаты точек измерений в системе координат, связанной с ЛА, а также измеряемые значения высоты рельефа Hj.
Согласно фиг.2 получим систему уравнений для каждого луча j в следующем виде

По полученным данным о скорости и углах эволюции определяют координаты проекции точки траектории ЛА на плоскость плановых координат.
Для первого измерения эти координаты считаются нулевыми (то есть положение ЛА во время первого измерения совпадает с началом координат системы Оrxryr)

Местные координаты ЛА во время выполнения следующих измерений вычисляют по рекуррентным соотношениям

где Tс - период поступления измеренных данных, i=1, 2,... - номер текущего измерения.
Зная координаты точек измерений в системе координат, связанной с ЛА (Oaxaуa), и местные координаты начала Оа, определяют координаты точек измерений в местной системе координат

Перебор гипотез заключается в следующем. Для каждого из возможных положений ЛА в пределах квадрата неопределенности вычисляют координаты (в дискретной системе координат) точек измерений, определенные ранее в местной системе координат. Для этого точку Оr помещают поочередно в узлы координатной сетки внутри квадрата неопределенности и выполняют вычисление показателя близости данных. Координаты точек измерений в дискретной системе координат определяют как

где nhx и nhy - смещения точки Оr для различных гипотез, определенные в количестве узлов сетки эталонной карты.
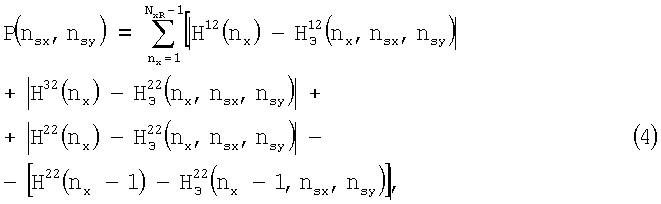
Показатель близости данных P(nhx, nhy) Для данного случая имеет вид

Здесь nhx и nhy - смещения точки Оr для различных гипотез; K - количество измерений;  - разность измеренных в k-м измерении значений высоты по первому и левому лучам;
- разность измеренных в k-м измерении значений высоты по первому и левому лучам;  - разность измеренных в k-м измерении значений высоты по первому и правому лучам;
- разность измеренных в k-м измерении значений высоты по первому и правому лучам;  - разность значений высоты измеренных в k-м и (k-1)-м измерениях;
- разность значений высоты измеренных в k-м и (k-1)-м измерениях;  - разность определенных для некоторой гипотезы (для определенного значения nhx и nhy) значений высоты по данным эталонной карты на k-м измерении по первому и левому лучам;
- разность определенных для некоторой гипотезы (для определенного значения nhx и nhy) значений высоты по данным эталонной карты на k-м измерении по первому и левому лучам;  - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по первому и правому лучам;
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по первому и правому лучам;  - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м и (k-1)-м измерениях по первому лучу.
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м и (k-1)-м измерениях по первому лучу.
По завершении всех измерений производят поиск глобального экстремума показателя близости данных P(nhx, nhy) и определяют поправки к координатам местоположения ЛА по плановым координатам.
Для определения поправки к координатам местоположения ЛА по третьей координате (высоте) найдем высоту полета ЛА в момент определения поправок местоположения ЛА в плановых координатах мерного участка. Для определения поправки по высоте требуется знать значение высоты ЛА над подстилающим рельефом в тот же момент времени.
В случае, когда углы крена и тангажа равны нулю αt=0, αz=0, то есть когда первый луч направлен вертикально вниз, измеренная высота будет равна наклонной дальности до поверхности мерного участка, полученной при измерении по первому лучу в момент определения поправок местоположения ЛА в плановых координатах мерного участка.
В общем случае, когда αt≠0 и αz≠0, измеренная высота отличается от результата измерения наклонной дальности до поверхности мерного участка, полученной при измерении по первому лучу.
Будем считать (фиг.3), что ЛА расположен в точке О, а угол между первым лучом ОН1 и перпендикуляром к поверхности ОН0 равен Q. Отметим, что в общем случае ОНj=Dj. Например, для первого луча, согласно фиг.2, OH1=D1.
В результате получим выражение

Учитывая известные высоты точек Н1 и H0 эталонной карты в плановых координатах мерного участка и используя интерполяционные методы, вычислим высоты рельефа в этих точках: Н1L1 и H0L0.
Разность hе (фиг.3), равная he=Н1L1-H0L0, добавленная к значению OHR, даст искомую высоту ЛА над поверхностью мерного участка

Таким образом, данный способ навигации ЛА имеет существенные отличия от известных способов навигации, поскольку обеспечивается за время движения ЛА над мерным участком определение поправок местоположения ЛА кроме плановых координат, также и по высоте, то есть реализуется повышенная точность управления движением ЛА, поскольку определяют поправки по всем трем координатам и выдают сигналы коррекции местоположения ЛА соответственно по трем координатам, чего не было ранее.
Рассмотренный алгоритм КЭСН может быть реализован благодаря вычислению разностей результатов измерений по нескольким лучам радиоволн.
Данный алгоритм КЭСН позволяет проводить коррекцию местоположения ЛА уже после нескольких измерений и может значительно сократить время, необходимое на выполнение коррекции местоположения ЛА при движении над мерным участком.
Важно отметить, что рассмотренный способ навигации ЛА с предложенным алгоритмом сохраняет свои положительные свойства при различном количестве лучей радиоволн и обеспечивает работоспособность и для трех, и для большего количества лучей радиоволн. Число используемых лучей радиоволн определяется только временем, в течение которого обеспечивается измерение местоположения ЛА при движении над мерным участком поверхности.
Применение многолучевого (количество лучей радиоволн составляет не менее трех) режима составления текущей карты местности позволяет осуществить наибольший охват мерного участка поверхности при минимальной ширине лучей радиоволн и наибольшем энергетическом потенциале, что повышает точность определения дальности до отдельных точек поверхности и соответственно повышает точность составления текущей карты.
Таким образом, способ навигации летательных аппаратов обладает рядом существенных преимуществ перед аналогом и прототипом.
ЛИТЕРАТУРА
1. Белоглазов И.Н., Джангава Г.И., Чигин Г.П. Основы навигации по геофизическим полям. - М.: Наука, 1985. - 328 С. (С.10-11, 19-22, 25-34).
2. Ржевкин В.А. Автономная навигация по картам местности // Зарубежная радиоэлектроника. - 1981. - N10. - С.3-28.
3. Патент 2284544 РФ, МПК G01S 5/02, G01C 21/20. Способ навигации летательных аппаратов / Хрусталев А.А., Кольцов Ю.В., Рындык А.Г., Плужников А.Д., Потапов Н.Н., Егоров С.Н. // Изобретения. - 2005. - N27 от 27.09.2006 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2340874C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2739872C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2680969C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2515469C1 |
| Способ навигации летательных аппаратов | 2016 |
|
RU2611564C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2836616C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2008 |
|
RU2385468C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2426073C1 |
Изобретение относится к области радиолокационной техники и может быть использовано при построении различных радиолокационных или аналогичных систем, предназначенных для навигации летательных аппаратов с использованием радиоволн путем определения местоположения и управления движением летательных аппаратов. Технический результат изобретения заключается в повышении быстродействия и точности способа навигации летательных аппаратов за счет того, что вычисление сигнала коррекции местоположения для управления движением летательных аппаратов с помощью радиоволн осуществляют по трем координатам при движении летательных аппаратов. Способ навигации летательных аппаратов заключается в использовании эталонной карты местности, составленной известным способом до начала движения летательных аппаратов, выборе мерного участка местности эталонной карты, составлении текущей карты - измерении параметров мерного участка эталонной карты с помощью радиоволн, сравнении полученных значений мерного участка текущей и эталонных карт, вычислении сигнала коррекции траектории движения на базе определения результатов многолучевых измерений по трем координатам, управлении движением летательных аппаратов путем коррекции их местоположения по мере прохождения мерного участка. 3 ил.
Способ навигации летательных аппаратов, заключающийся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью многолучевого режима измерения при помощи радиоволн, излучаемых в виде лучей, определении разности результатов многолучевых измерений, сравнении значений плановых координат текущей и эталонной карт, вычислении сигнала коррекции траектории движения и управлении движением летательных аппаратов путем коррекции их местоположения, отличающийся тем, что коррекцию местоположения летательных аппаратов осуществляют по трем координатам эталонной карты (плановые координаты и высота) в координатах мерного участка за время движения летательных аппаратов над мерным участком, причем после определения местоположения летательных аппаратов в плановых координатах мерного участка вычисляют высоты летательных аппаратов в координатах мерного участка в точке определения местоположения летательных аппаратов в плановых координатах мерного участка как сумму высоты, представляющей собой значение измеренной наклонной дальности, умноженное на косинус угла наклона луча относительно перпендикуляра к поверхности мерного участка, и поправки, определяемой по эталонной карте, представляющей собой разность высот рельефа мерного участка в точке определения наклонной дальности и точке, находящейся на линии перпендикуляра к поверхности мерного участка.
| Способ определения пространственных координат центров проектирования аэрофотоснимков | 1990 |
|
SU1739196A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТУРЫ В УСТАНОВКУ ДИСТАНЦИОННОГО ВЗРЫВАТЕЛЯ (ТРУБКИ) | 2004 |
|
RU2253823C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2264598C1 |

