Изобретение относится к области радиолокационной техники и может быть использовано при построении различных радиолокационных (радарных) или аналогичных систем, предназначенных для определения местоположения летательных аппаратов с использованием радиоволн и управления движением летательных аппаратов (ЛА).
Корреляционно-экстремальные способы навигации (КЭСН) [1] обеспечивают измерение показателей экстремального режима ЛА, переработку этой информации и выработку управляющего воздействия для коррекции координат местоположения ЛА [1]. При этом задача КЭСН состоит в отыскании положения экстремума и слежении за его возможными изменениями, которое осуществляется с помощью процесса поиска [2].
Принцип работы КЭСН по геофизическим полям, реализуемый картосличительными способами навигации, основан на сравнении (сопоставлении) текущих карт местности, полученных с использованием радиоволн, с эталонными картами той же местности, априори находящимися на ЛА [3]. Эталонные карты [1, 4 ,5] изготавливают заранее (до начала движения ЛА над заданной поверхностью местности), а текущие снимают во время полета ЛА [3]. По отклонениям эталонных карт местности от текущих в заданной точке траектории движения ЛА определяют отклонение фактической траектории от заданной. В результате определяют поправку с целью коррекции движения ЛА.
Известен способ навигации летательных аппаратов [1], использующийся в корреляционно-экстремальных системах навигации и заключающийся в подгонке контуров местности для определения местоположения ЛА с использованием радиоволн, излучаемых в виде одного луча (далее: радиоволн в виде луча), позволяющий снимать информацию в текущей точке.
Реализация способа [1] заключается в следующем.
Используют информацию эталонной карты местности о навигационном поле земли, которая априори находится на ЛА (до начала движения ЛА).
Выбирают участок местности на эталонной карте (мерный участок), который определяется величиной допустимых отклонений ЛА от заданной траектории (квадрат неопределенности).
Измеряют случайные функции двух аргументов, которыми являются пространственные координаты xТ и yT («т» - параметры текущей карты местности) с использованием одного луча радиоволн.
Составляют для мерного участка текущую карту на основе измерений xT и yT.
Определяют значение функции в точке xЭ и yЭ («Э» - параметры эталонной карты местности) после прохождения ЛА мерного участка.
Совмещают реализации случайных функций ϕ(хТ, yТ) текущей карты со значениями ϕ(xЭ, yЭ) эталонной карты посредством обеспечения условий

Сравнивают текущее ϕ(хТ, yТ) и эталонное ϕ(xЭ, yЭ) значения путем корреляционной обработки реализаций.
Вычисляют сигнал коррекции местоположения ЛА.
Управляют движением ЛА путем коррекции его местоположения.
Недостатками способа [1] являются.
Недостаточная оперативность алгоритма навигации, поскольку сигнал коррекции движения ЛА вырабатывается только после прохождения всего мерного участка.
Отсутствие информации о текущем местоположении ЛА в процессе движения над мерным участком.
Низкое быстродействие определения местоположения ЛА, поскольку классический корреляционный алгоритм требует достаточно большого времени для выработки сигнала коррекции местоположения ЛА, обусловленного применением операции умножения.
В данном способе точность вычисления сигнала коррекции местоположения ЛА (поправки к координатам ЛА) определяется рядом факторов, но не может превышать значения шага координатной сетки эталонной карты.
Известен способ навигации летательных аппаратов [3], выбранный за прототип.
Реализация способа [3] заключается в следующем.
Используют информацию эталонной карты местности о навигационном поле земли, которая априори находится на ЛА (до начала движении ЛА).
Выбирают участок местности (мерный участок), который определяется величиной допустимых отклонений ЛА по дальности (квадрат неопределенности).
Измеряют с использованием одного луча радиоволн случайные функции, которыми являются значения высот  («т» - параметры текущей карты) от ЛА до рельефа мерного участка в точках i траектории движения ЛА (трассы
(«т» - параметры текущей карты) от ЛА до рельефа мерного участка в точках i траектории движения ЛА (трассы  ).
).
Вычисляют после прохождения ЛА мерного участка отклонения  высот
высот  , измеренные с помощью радиоволн, от высот Hoi, измеренных бародатчиком (абсолютная высота), в точках i траектории движения ЛА
, измеренные с помощью радиоволн, от высот Hoi, измеренных бародатчиком (абсолютная высота), в точках i траектории движения ЛА

Составляют для мерного участка текущую карту на основе вычисленных высот рельефа  после прохождения мерного участка, то есть получают карту высот рельефа мерного участка (плановые координаты мерного участка), для составления которой используют данные о скорости ЛА и углах эволюций (тангаж, крен и курс).
после прохождения мерного участка, то есть получают карту высот рельефа мерного участка (плановые координаты мерного участка), для составления которой используют данные о скорости ЛА и углах эволюций (тангаж, крен и курс).
Определяют на основе эталонной карты местности трассы  («Э» - параметры эталонной карты местности), направленные вдоль мерного участка с шагом j (j=1, 2, 3, …N) поперек мерного участка, соответствующим шагу эталонной карты (плановые координаты эталонной карты).
(«Э» - параметры эталонной карты местности), направленные вдоль мерного участка с шагом j (j=1, 2, 3, …N) поперек мерного участка, соответствующим шагу эталонной карты (плановые координаты эталонной карты).
Совмещают текущую и эталонную карты местности.
Сравнивают текущее  и эталонное
и эталонное  значения путем корреляционно-экстремальной обработки реализаций.
значения путем корреляционно-экстремальной обработки реализаций.
Вычисляют сигнал коррекции местоположения ЛА на основе анализа различий (взаимных смещений) эталонной и текущей карт местности мерного участка.
В данном способе точность вычисления сигнала коррекции местоположения ЛА (поправки к координатам ЛА) определяется рядом факторов, но не может превышать значения шага координатной сетки эталонной карты.
Управляют движением ЛА путем коррекции его местоположения.
В данном КЭСН траектория движения ЛА разделена на автономный участок (наблюдение) и участок коррекции без их возможного сочетания.
Недостатками способа [3] являются.
Выработка сигнала коррекции только после пролета всего мерного участка.
Необходимость измерения абсолютной высоты ЛА Н0 над нулевым уровнем эталонной карты.
Отсутствие информации о текущем местоположении ЛА в процессе движения над мерным участком (автономный участок), поскольку обработка измеренной информации осуществляется только после пролета всего мерного участка.
Низкое быстродействие определения местоположения ЛА, поскольку классический корреляционный алгоритм требует достаточного большого времени для выработки сигнала коррекции местоположения ЛА, обусловленного применением операции умножения.
Низкая точность определения местоположения движущихся объектов. Поскольку точность вычисления сигнала коррекции траектории движения ЛА зависит от шага координатной сетки вдоль мерного участка эталонной карты местности, значение которого априори задано и неизменно.
Ограничение потенциальной точности вычисления сигнала коррекции траектории движения, поскольку для повышения точности необходимо уменьшение шага координатной сетки, что ведет к пропорциональному увеличению объема хранимой на ЛА априорной информации и объема производимых вычислений. Последнее является чрезвычайно сложной в реализации технической задачей.
Техническим результатом предлагаемого изобретения является повышение быстродействия способа навигации летательных аппаратов, что позволяет уточнять местоположение ЛА во время пролета мерного участка, и повышение точности способа навигации летательных аппаратов за счет того, что сравнение значений плановых координат текущей и эталонной карт осуществляют дважды путем их привязки к эталонной карте, причем второй раз с помощью наложения новой координатной сетки с шагом, меньшим исходного, без пропорционального увеличения объема хранимой на летательном аппарате априорной информации и объема производимых вычислений.
Технический результат достигается тем, что в способе навигации летательных аппаратов, заключающемся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты и задаваемого в виде высот рельефа в узлах координатной сетки с шагом Δ, наложенной на мерный участок, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений высоты полета ЛА при помощи радиоволн, излучаемых в виде одного луча, сравнении значений плановых координат текущей и эталонной карт в пределах квадрата неопределенности, вычислении сигнала коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) с привязкой к узлам координатной сетки с шагом Δ и управлении движением ЛА путем коррекции их местоположения, при вычислении сигнала коррекции траектории движения по трем координатам эталонной карты с привязкой к узлам координатной сетки с шагом Δ определяют разности результатов измерений высоты в текущем измерении и в предыдущем, производят накопление и запоминание результатов измерений высот. Накопление результатов измерений высот обеспечивают увеличением размеров квадрата неопределенности в направлении движения ЛА в пределах мерного участка. Вычисляют для каждого из возможных положений ЛА в пределах квадрата неопределенности слагаемые показателя близости, завершают сравнение значений плановых координат текущей и эталонной карт при превышении критерием, учитывающим ширину главного лепестка показателя близости и соотношение экстремального и среднего значений показателя близости, заданного значения. Определяют аргументы показателя близости, при которых достигается глобальный экстремум, и вычисляют сигнал коррекции траектории движения по трем координатам эталонной карты с привязкой к узлам координатной сетки с шагом Δ. После вычисления сигнала коррекции траектории движения по трем координатам эталонной карты с привязкой к узлам координатной сетки с шагом Δ устанавливают на эталонной карте новый квадрат неопределенности, размеры которого определяются погрешностью вычисления сигнала коррекции траектории движения по трем координатам эталонной карты с привязкой к узлам координатной сетки с шагом Δ. Накладывают на новый квадрат неопределенности новую координатную сетку с шагом ΔНОВ, таким что ΔНОВ<Δ. Поверхности между узлами новой координатной сетки эталонной карты аппроксимируют поверхностями второго порядка. Составляют текущую карту на основе ранее выполненных и запомненных результатов измерений высот. Сравнивают значения плановых координат текущей и эталонной карт в пределах нового квадрата неопределенности. Вычисляют сигнал коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) с привязкой к узлам новой координатной сетки для управления движением ЛА путем коррекции их местоположения.
Способ навигации ЛА поясняют следующие чертежи:
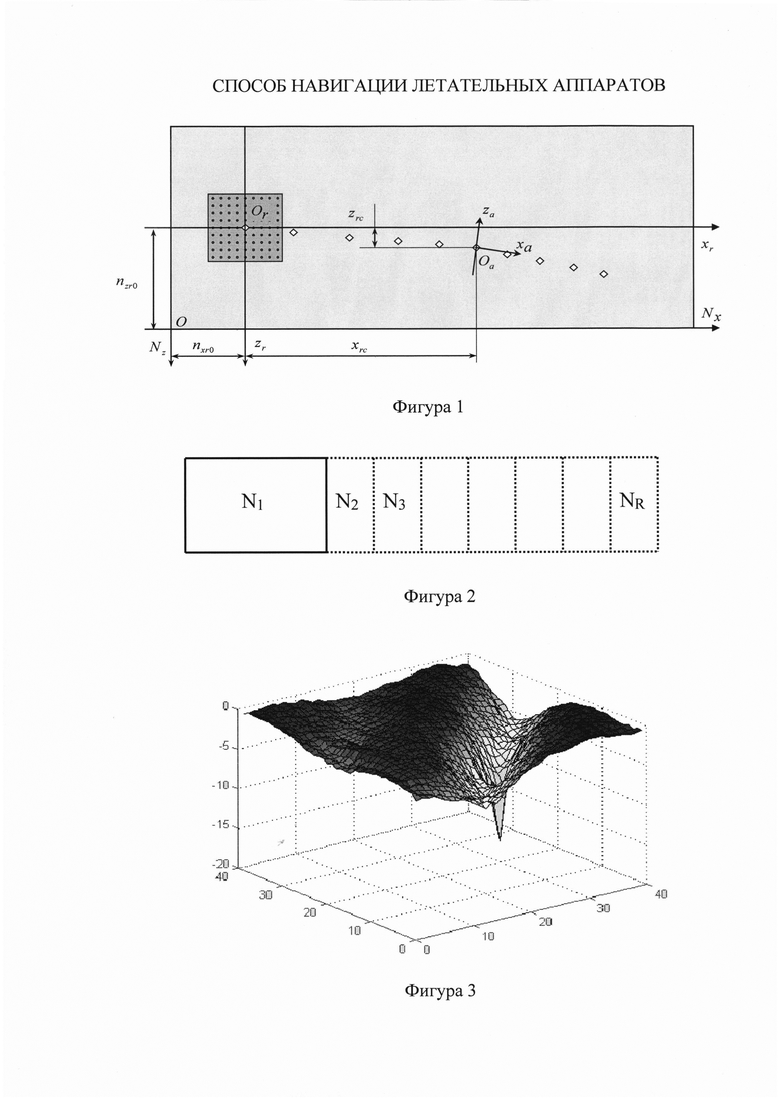
- на фигуре 1 представлено взаимное расположение систем координат при движении ЛА;
- на фигуре 2 рассмотрен процесс изменения размеров квадрата неопределенности;
- на фигуре 3 представлен пример показателя близости данных.
- на фигуре 4 приведены: слева - квадрат неопределенности с координатной сеткой с исходным шагом Δ, справа - квадрат неопределенности с координатной сеткой с новым шагом ΔНОВ (черная точка внутри квадрата неопределенности - расположение координат пересечения луча волн с рельефом мерного участка); на фигуре 4 принято - погрешность вычисления сигнала коррекции траектории движения с привязкой к узлам координатной сетки с шагом Δ не превышает Δ;
- на фигуре 5 показан квадрат неопределенности с новой координатной сеткой, имеющей шаг ΔНОВ, и аппроксимация поверхности между узлами новой координатной сетки эталонной карты поверхностями второго порядка.
Способ навигации реализуется следующим образом.
Задачей КЭСН является уточнение местоположения ЛА, определенного иными средствами навигации. Уточнение координат (уточнение местоположения) производится в пределах области, определяемой погрешностью этих средств навигации. Пусть упомянутая область имеет форму квадрата, сторона которого равна удвоенной погрешности иных средств навигации, и называется квадрат неопределенности.
Исходными данными для вычислений в КЭНС являются:
- эталонная карта, представляющая собой массив данных о рельефе местности, элементы которого представляют собой высоты рельефа в узлах координатной сетки с шагом Δ эталонной карты на плоскости Orxrzr (фиг. 1);
- данные о законе аппроксимации рельефа эталонной карты между узлами координатной сетки;
- данные от других средств измерений, отличных от полученных с помощью высотомера КЭСН, поступающие с каждым результатом измерений высоты: значения угла αz крена, угла αх курса, угла αt тангажа, скорости ν ЛА;
В течение времени движения над мерным участком определяют и запоминают текущую карту местности, для составления которой используют данные об измеренных значениях высот с помощью луча радиоволн, а также значениях скорости и углах эволюций ЛА (тангаж, крен и курс), поступающих от других средств измерений.
Для удобства представления информации будем применять три системы координат (фиг. 1): большой прямоугольник представляет собой эталонную карту рельефа местности; квадрат является квадратом неопределенности; возможные положения ЛА внутри квадрата неопределенности в момент начала измерений (гипотезы) обозначены точками, а точки траектории ЛА, в которых производят измерения, обозначены ромбами.
Определим местную систему координат, на которую должны быть ориентированы вычисления в КЭСН, как правую прямоугольную Декартову систему координат Orxryrzr с началом Or. Полагаем, что оси Orxr и Orzr лежат в плоскости местного горизонта, т.е. хr и zr являются координатами ЛА. Относительно плоскости Orxrzr определяются высоты рельефа местности и ЛА. Таким образом, указанные высоты являются соответствующими значениями координаты yr.
Начало координат Or выбрано так, что ось Orzr направлена в расчетную точку появления летательного аппарата над участком местности, соответствующим эталонной карте. Ось Orzr считается коллинеарной по отношению к горизонтальной составляющей расчетного вектора скорости ЛА (фиг. 1). Плановая система координат неподвижна и связана с эталонной картой.
Для того чтобы привязать плановые координаты к эталонной карте (которая задана в виде массива), используют дискретную систему координат. Ее оси Nx и Nz сонаправлены с осями местной системы Orxrzr (фиг. 1). Нулевым индексам в дискретной системе координат соответствует левый нижний угол эталонной карты. Предполагаемое значение дискретных координат ЛА в момент начала сбора данных обозначим как (nхr0, nyr0).
Следовательно, координаты точки Or (начало местной системы координат) в дискретной системе будут равны (nxr0, nzr0). Связь между координатами дискретной и местной систем координат определяется выражениями

где Δ - шаг координатной сетки эталонной карты.
При определении координат точек измерений (точек пересечения подстилающей поверхности и луча радиоволн) используют систему координат, связанную с текущим положением ЛА. Начало координат этой системы - точку Oa - поместим в текущую точку проекции траектории ЛА на плоскость плановых координат. Ось Oaxa по направлению совпадает с текущим направлением вектора скорости ЛА.
По полученным данным о скорости и углах эволюции определяют координаты проекции точки траектории ЛА на плоскость плановых координат.
Для первого измерения эти координаты считаются нулевыми (положение ЛА во время первого измерения совпадает с началом координат системы Orxrzr)

Местные координаты ЛА во время выполнения следующих измерений вычисляют по рекуррентным соотношениям


где  и
и  - координаты проекции текущего положения ЛА на плоскость плановых координат,
- координаты проекции текущего положения ЛА на плоскость плановых координат,  - курс ЛА в текущей точке измерений (угол между вектором скорости ЛА и осью Orxr), Tс - период поступления измеренных данных, i=1, 2, … - номер текущего измерения.
- курс ЛА в текущей точке измерений (угол между вектором скорости ЛА и осью Orxr), Tс - период поступления измеренных данных, i=1, 2, … - номер текущего измерения.
Зная координаты точек измерений в системе координат, связанной с ЛА, (Oaxaza) и местные координаты начала Oa, определяют координаты точек измерений в плановой системе координат

При пролете над мерным участком при помощи измерений по одному лучу производят накопление и запоминание результатов измерений высот. В первом такте вычислений используют разность измерений высот во втором измерении и в первом. Во втором такте вычислений к разностям измерений первого такта вычислений добавляют разности измерений второго такта вычислений: разности измерений высот в третьем измерении и во втором. В К-м такте вычислений дополнительно к разностям измерений первого, второго и последующих тактов вычислений, включая (К-1)-й такт, добавляют разности измерений К-го такта вычислений: разности измерений высоты в (K+1)-м измерении и в К-м.
Для каждого из возможных положений ЛА в пределах квадрата неопределенности с шагом координатной сетки эталонной карты Δ вычисляют координаты точек измерений в плановой системе координат, которые определяют как


где nhx и nhz - смещения точки Оr для различных гипотез, определенные в узлах эталонной карты с шагом координатной сетки Δ.
Вычисляют для каждого из возможных положений ЛА в пределах квадрата неопределенности (для всех гипотез) слагаемые показателя близости DPEЗ для предложенного дифференциально-разностного КЭСН, определяющегося выражением:

где D (nх) - значения показателя близости для всех K измерений.



В предложенном адаптированном методе значения а(nх) и b(nx) будут вычисляться иначе:




или

Аналогично значениям a(nx)вычисляют значения b(nx).
Причем для всех последующих за первым измерений для обеспечения накопления результатов высот размеры квадрата неопределенности в направлении движения ЛА будут увеличиваться в пределах мерного участка (фиг. 2) от N1 до NR.
Условием увеличения размеров квадрата неопределенности на шаг координатной сетки в направлении движения ЛА является переход координат точек измерений в плановой системе координат через координатную сетку правой границы квадрата неопределенности.
После вычисления всех D(nx) - значений показателя близости для всех NxR измерений проводят поиск экстремума (в случае предложенного дифференциально-разностного способа КЭСН - минимума) показателя близости, который представляет собой функцию, определяющую местоположение ЛА в плановых координатах в момент начала измерений внутри квадрата неопределенности. Показатель близости может иметь вид, показанный на фиг. 3.
Критерий, на основании которого завершают сравнение значений плановых координат текущей и эталонной карт и вычисляют сигнал коррекции траектории движения, разработан на основании учета ширины главного лепестка показателя близости и соотношения экстремального и среднего значений показателя близости и определяется соотношениями


где S0 - среднее значение показателя близости в пределах допустимого отклонения от экстремума, S - среднее значение показателя близости, вычисленное по всем его элементам; Cmin - минимальное значение показателя близости; Сmax - максимальное значение показателя близости; N0 - количество элементов в области допустимых отклонений; nsx и nsz - координаты (строка и столбец) элементов показателя близости; nsx0 и nsz0 - измеренные координаты экстремума показателя близости; r - радиус области допустимых отклонений; N - общее количество элементов показателя близости.
Решение о завершении сравнения значений плановых координат текущей и эталонной карт принимают, если R превышает заданное значение Rmin, а ширина главного лепестка не превышает заданное максимально допустимое значение ошибки измерения плановых координат.
Определяют аргументы показателя близости, при которых достигается глобальный экстремум, которые и являются значениями поправок к координатам в узлах эталонной карты с шагом координатной сетки Δ.
Третья координата (высота) была определена при проведении измерений высот.
Вычисляют сигнал коррекции траектории движения по трем координатам (плановые координаты и высота) с шагом координатной сетки эталонной карты Δ.
Таким образом, предложенный дифференциально-разностный метод корреляционно-экстремальной обработки информации позволяет уточнять местоположение ЛА во время пролета мерного участка.
После завершения вычисления сигнала коррекции траектории движения по трем координатам с шагом координатной сетки эталонной карты Δ устанавливают на эталонной карте новый квадрат неопределенности, размер которого определяется погрешностью вычисления сигнала коррекции траектории движения ЛА с привязкой к узлам координатной сетки Δ.
Накладывают на новый квадрат неопределенности новую координатную сетку с шагом ΔНОВ, как показано на фиг. 4, так, что ΔНОВ<Δ.
Аппроксимируют поверхность между узлами новой координатной сетки эталонной карты поверхностями второго порядка.
Это означает, что поверхность, на которую накладывается новая координатная сетка, является криволинейной поверхностью (фиг. 5), которая в общем виде задается совокупностью точек, координаты которых (x, z, y) удовлетворяют уравнению

Коэффициенты  могут принимать любые действительные значения, но не должны быть равны нулю одновременно. Корни характеристического уравнения поверхности второго порядка всегда действительные.
могут принимать любые действительные значения, но не должны быть равны нулю одновременно. Корни характеристического уравнения поверхности второго порядка всегда действительные.
На практике минимальное значение шага координатной сетки ΔНОВ ограничено погрешностью измерений высоты и погрешностью аппроксимации поверхности между узлами новой координатной сетки эталонной карты.
Вычисляют для каждого из возможных положений ЛА в пределах нового квадрата неопределенности с шагом координатной сетки ΔНОВ (для всех гипотез) слагаемые показателя близости, используя ранее полученные и запомненные результаты измерений высот.
Производят поиск глобального экстремума показателя близости данных  .
.
Определяют поправки к координатам местоположения ЛА в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка с точностью, определяемой шагом ΔНОВ новой координатной сетки.
Определяют высоту ЛА над поверхностью мерного участка в координатах мерного участка (в точке определения местоположения ЛА в плановых координатах мерного участка), как описано выше.
Вычисляют сигнал коррекции траектории движения ДА по трем координатам эталонной карты (плановые координаты и высота) с привязкой к узлам координатной сетки с шагом ΔНОВ и выдают его для управления движением ЛА путем коррекции его местоположения.
Таким образом, предложенный дифференциально-разностный способ навигации ЛА позволяет уточнять местоположение ЛА во время пролета мерного участка, а не после, как происходит при использовании классических корреляционных методов.
В предложенном дифференциально-разностном способе повышена точность вычисления сигнала коррекции траектории движения ЛА (поправок к координатам ЛА) за счет уменьшения значения шага координатной сетки эталонной карты.
Характерно, что использование новой координатной сетки не ведет к пропорциональному увеличению объема хранимой на ЛА априорной информации. Это связано с тем, что на ЛА хранится эталонная карта, представляющая собой массив данных о рельефе местности, элементы которого представляют собой высоты рельефа в узлах координатной сетки с шагом Δ эталонной карты, а не с шагом ΔНОВ.
Кроме того, в предложенном способе навигации ЛА по сравнению с аналогом и прототипом исключены: операция умножения, характерная для классического корреляционного алгоритма для вычисления сигнала коррекции местоположения ЛА; информация обо всех элементах текущей карты для вычисления среднего значения высоты по данным текущей карты и среднего значения высоты участка эталонной карты; информация об абсолютной высоте ЛА над нулевым уровнем эталонной карты; дополнительные вычисления для определения средних уровней высот измеренной карты и эталонной карты.
Таким образом, способ навигации летательных аппаратов обладает рядом существенных преимуществ перед прототипом и аналогом.
ЛИТЕРАТУРА
1 Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. - М.: Сов. радио, 1974. - 392 с. (с. 3, 27-32).
2 Цыпкин Я.З., Попков Ю.С. Теория нелинейных импульсных систем. - М.: Наука, 1973. - 414 с. (с. 303-304).
3 Ржевкин В.А. Автономная навигация по картам местности // Зарубежная радиоэлектроника. - 1981. - N10. - с. 3-28. (прототип, с. 7-8).
4 Бочкарев A.M. Корреляционно-экстремальные системы навигации // Зарубежная радиоэлектроника. - 1981. - N9. - с. 28-53.
5 Андреев Г.А., Потапов А.А. Активные системы ориентации по географическим полям // Зарубежная радиоэлектроника. - 1988. - N9. - с. 62-85, 39 (с. 80).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2426073C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2008 |
|
RU2385468C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2515469C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2338158C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2340874C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2739872C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2680969C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2836616C1 |
Изобретение относится к области навигации и может быть использовано при построении различных систем локации, предназначенных для навигации летательных аппаратов (ЛА). Достигаемый технический результат - повышение быстродействия навигации ЛА за счет оперативной обработки получаемой информации Указанный результат достигается за счет того, что способ навигации заключается в использовании эталонной карты местности, составленной до начала движения ЛА, выборе участка местности (мерный участок) эталонной карты, составлении текущей карты - измерением параметров мерного участка с помощью радиоволн с накоплением результатов однолучевых измерений высоты и увеличением размеров квадрата неопределенности в направлении движения ЛА в пределах мерного участка, сравнении полученных значений мерного участка текущей и эталонных карт, вычислении сигнала коррекции траектории движения по трем координатам эталонной карты на базе определения разности результатов измерений высоты, запоминании результатов измерений высоты, а также заключается в повторном вычислении сигнала коррекции при использовании координатной сетки со значительно меньшим шагом, который будет определять точность вычисления сигнала коррекции траектории движения ЛА, и последующем управлении движением ЛА путем коррекции их местоположения по мере прохождения мерного участка. 5 ил.
Способ навигации летательных аппаратов (ЛА), заключающийся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты и задаваемого в виде высот рельефа в узлах координатной сетки с шагом Δ, наложенной на мерный участок, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений высоты полета ЛА при помощи радиоволн, излучаемых в виде одного луча, сравнении значений плановых координат текущей и эталонной карт в пределах квадрата неопределенности, вычислении сигнала коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) с привязкой к узлам координатной сетки с шагом Δ и управлении движением ЛА путем коррекции их местоположения, отличающийся тем, что при вычислении сигнала коррекции траектории движения по трем координатам эталонной карты с привязкой к узлам координатной сетки с шагом Δ определяют разности результатов измерений высоты в текущем измерении и в предыдущем, производят накопление и запоминание результатов измерений высот, а накопление результатов измерений высот обеспечивают увеличением размеров квадрата неопределенности в направлении движения ЛА в пределах мерного участка; вычисляют для каждого из возможных положений ЛА в пределах квадрата неопределенности слагаемые показателя близости; завершают сравнение значений плановых координат текущей и эталонной карт при превышении критерием, учитывающим ширину главного лепестка показателя близости и соотношение экстремального и среднего значений показателя близости, заданного значения; определяют аргументы показателя близости, при которых достигается глобальный экстремум, и вычисляют сигнал коррекции траектории движения по трем координатам эталонной карты с привязкой к узлам координатной сетки с шагом Δ; после вычисления сигнала коррекции траектории движения по трем координатам эталонной карты с привязкой к узлам координатной сетки с шагом Δ устанавливают на эталонной карте новый квадрат неопределенности, размеры которого определяют погрешностью вычисления сигнала коррекции траектории движения по трем координатам эталонной карты с привязкой к узлам координатной сетки с шагом Δ; накладывают на новый квадрат неопределенности новую координатную сетку с шагом ΔНОВ, таким что ΔНОВ<Δ; поверхности между узлами новой координатной сетки эталонной карты аппроксимируют поверхностями второго порядка; составляют текущую карту на основе ранее выполненных и запомненных результатов измерений высот; сравнивают значения плановых координат текущей и эталонной карт в пределах нового квадрата неопределенности, вычисляют сигнал коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) с привязкой к узлам новой координатной сетки для управления движением ЛА путем коррекции их местоположения.
| РЖЕВКИН В.А | |||
| Автономная навигация по картам местности | |||
| Зарубежная радиоэлектроника | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| СПОСОБ ГРУППОВОЙ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2130622C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2340874C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2014 |
|
RU2559820C1 |
| Защитный состав для обработки древесины | 1988 |
|
SU1708150A3 |
| JP 2014157093 A, 28.08.2014 | |||
| US 6411896 B1, 25.06.2002. | |||

