Изобретение относится к области навигации движущихся объектов и может быть использовано при построении различных систем локации, предназначенных для определения местоположения движущихся объектов, управления их движением и обеспечения навигации движущихся объектов.
Известны способы навигации движущихся объектов (ДО) [1], основанные на сравнении текущих карт местности, полученных с использованием радиоволн, с эталонными картами той же местности, в основе которых лежит определение местоположения ДО с последующим управлением движением ДО путем коррекции их местоположения. Эталонные карты установлены на ДО до начала их движения, а текущие получают во время движения ДО. По отклонениям текущих карт местности от эталонных в заданной точке траектории движения ДО определяют отклонение фактической траектории от заданной. В результате определяют поправку в местоположение ДО с целью коррекции их движения и обеспечения навигации.
Известен способ навигации движущихся объектов [2], заключающийся в подгонке контуров местности на основе определения местоположения ДО с использованием радиоволн, позволяющий снимать информацию в текущей точке.
Реализация способа [2] заключается в следующем.
Используют информацию эталонной карты местности о навигационном поле Земли.
Выбирают мерный участок местности на эталонной карте, который определяется величиной допустимых отклонений ДО по дальности.
Измеряют при помощи излучения и приема радиоволн плановые координаты xT и yT текущей карты местности.
Измеряют инерциальным способом текущие значения углов крена, тангажа и курса.
Составляют для мерного участка текущую карту с учетом информации об углах крена, тангажа и курса на основе измерений xT и yT.
Определяют значение функции в точке xЭ и yЭ для эталонной карты местности после прохождения ДО мерного участка.
Совмещают реализации функций φ(xT, yT) текущей карты со значениями φ(xЭ, yЭ) эталонной карты, посредством обеспечения условий: xЭ⇒xT, yЭ⇒yT.
Сравнивают текущее φ(xT, yT) и эталонное φ(xЭ, yЭ) значения.
Вычисляют сигнал коррекции местоположения ДО.
Управляют движением ДО путем коррекции его местоположения для обеспечения навигации.
Недостатком способа [2] является отсутствие информации о высоте движения ДО и текущем местоположении ДО в процессе движения над мерным участком. Недостатком способа [2] также является низкая помехоустойчивость при воздействии искусственных помех, так как способ [2] относится к активным, поскольку используется излучение сигналов при навигации ДО.
Известен способ спутниковой радионавигации ГЛОНАСС [3] для определения координат местоположения, например ДО, на базе спутниковых радионавигационных систем, включающих навигационные спутники (НС) и наземный комплекс (НК), в составе наземной станции траекторных измерений и наземного вычислительного центра.
Реализация способа [3] заключается в следующем.
Используют несколько навигационных спутников (НС).
Формируют каждым НС сложный радиосигнал, который представляет собой гармоническое колебание с цифровой фазовой модуляцией.
Излучают сформированные НС сложные радиосигналы.
Принимают излученные сложные радиосигналы, используя НК.
Измеряют дальность до ДО с помощью принятых излученных сложных сигналов и доплеровское смещение частоты излученного сложного сигнала, используя НК (наземную станцию траекторных измерений).
Определяют (вычисляют) три пространственные координаты ДО (высота и плановые координаты) с помощью НК (наземного вычислительного центра).
Передают вычисленную информацию с НК на борт НС.
Принимают переданную вычисленную информацию на борту НС.
Запоминают принятую информацию от НК на борту НС.
Передают на ДО запомненную принятую информацию с борта НС в навигационном сообщении.
Принимают на ДО навигационное сообщение с борта НС и используют полученную информацию о местоположении ДО для управления движением ДО путем коррекции движения ДО для обеспечения навигации.
Недостатком способа [3] является низкая устойчивость работы при реализации способа за счет действия искусственных помех, которые нарушают работоспособность способа [3]. В результате, во время действия помех информация о местоположении ДО не поступает на его борт и ДО движется по изначальной траектории, а навигация ДО не обеспечивается.
Известен способ навигации [4], выбранный за прототип.
Реализация способа [4] заключается в следующем.
Используют информацию эталонной карты местности о навигационном поле Земли, содержащую цифровую информацию о местоположении и пространственных параметрах реперных объектов (РО).
Выбирают участок местности на эталонной карте, который представляет собой мерный участок.
Выбирают на мерном участке один РО, плановые координаты и пространственные параметры которого известны с наибольшей точностью. Реперный объект может быть как пространственно-распределенным, так и состоящим из нескольких пространственно-распределенных объектов. Используют эталонную карту мерного участка с выбранным РО.
Измеряют инерциальным способом текущие значения углов крена, тангажа и курса.
Получают текущую карту РО при движении ДО над мерным участком в виде одного изображения мерного участка в одном или нескольких диапазонах длин волн.
Преобразуют текущую карту РО в цифровое изображение текущей карты РО.
Распознают РО на цифровом изображении текущей карты РО.
Определяют местоположение и пространственные параметры РО на цифровом изображении текущей карты РО.
Сравнивают эталонную и текущую карты РО путем их совмещения. Сравнение эталонной и текущей карт РО проводят путем подгонки пространственных параметров РО на цифровом изображении до совпадения с пространственными параметрами РО на цифровом изображении эталонной карты РО. Сравнение выполняют с учетом информации об углах крена, тангажа и курса.
Определяют местоположение ДО в плановых координатах эталонной карты.
Вычисляют сигнал коррекции траектории движения РО.
Управляют движением ДО путем коррекции его местоположения для обеспечения навигации.
Способ [4] имеет недостаток в том, что при определении местоположения ДО не получают значения высоты ДО при движении над мерным участком.
Техническим результатом предлагаемого изобретения является расширение возможностей способа навигации за счет определения высоты движения ДО над мерным участком с сохранением помехоустойчивости способа.
Технический результат достигается тем, что в способе навигации движущихся объектов, заключающемся в получении текущей карты реперного объекта и определении местоположения движущегося объекта в плановых координатах эталонной карты, вычисляют сигнал коррекции траектории движения и управляют движением движущегося объекта путем коррекции его местоположения для обеспечения навигации движущихся объектов. Местоположение движущегося объекта определяют путем использования эталонной карты местности в плановых координатах эталонной карты, содержащей реперные объекты, координаты которых известны. Выбирают один реперный объект, находящийся в пределах эталонной карты и который является пространственно-распределенным или состоящим из нескольких пространственно-распределенных объектов. Получают текущую карту выбранного реперного объекта в одном или нескольких диапазонах длин волн. Преобразуют текущую карту реперного объекта в цифровое изображение текущей карты реперного объекта. Распознают реперный объект на цифровом изображении текущей карты реперного объекта. Определяют местоположение и пространственные параметры реперного объекта на цифровом изображении текущей карты реперного объекта. Сравнивают эталонную и текущую карту реперного объекта путем подгонки пространственных параметров реперного объекта на цифровом изображении текущей карты реперного объекта до совпадения с пространственными параметрами реперного объекта на цифровом изображении эталонной карты реперного объекта. Для вычисления сигнала коррекции получают вторую текущую карту реперного объекта через интервал времени Δt после получения первой текущей карты реперного объекта. Определяют второе местоположение движущегося объекта в плановых координатах эталонной карты. Определяют местоположение движущегося объекта по высоте над эталонной картой в координатах эталонной карты путем измерения смещения в пикселах цифрового изображения текущей карты реперного объекта второго местоположения движущегося объекта относительно первого местоположения в плановых координатах эталонной карты за интервал времени Δt в направлении движения движущегося объекта, используя базу данных, установленную на движущемся объекте, в которой значениям смещения местоположения движущегося объекта в пикселах цифрового изображения текущей карты реперного объекта поставлены в соответствие значения высот движения движущегося объекта.
Технический результат достигается тем, что при реализации способа навигации ДО кроме одной (первой) текущей карты местности получают через время Δt вторую текущую карту, по которым определяют первое и второе местоположения движущегося объекта в плановых координатах эталонной карты, а для определения местоположения движущегося объекта по высоте в координатах эталонной карты измеряют смещение местоположения ДО в пикселах цифрового изображения текущей карты реперного объекта второго местоположения ДО относительно первого местоположения в плановых координатах эталонной карты за интервал времени Δt в направлении движения.
Способ навигации ДО поясняют следующие чертежи:
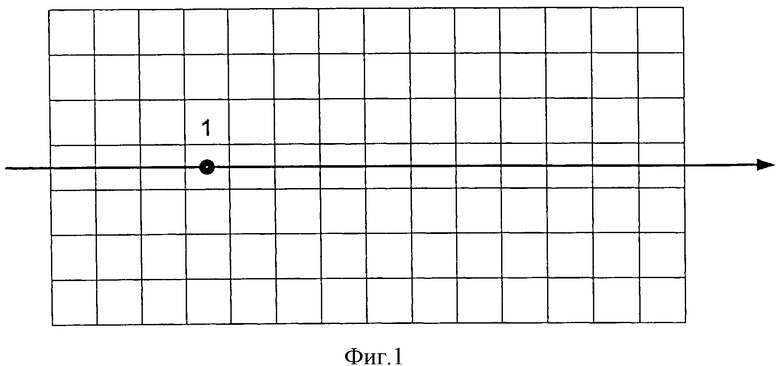
- на фигуре 1 представлено первое местоположение ДО в плановых координатах эталонной карты;
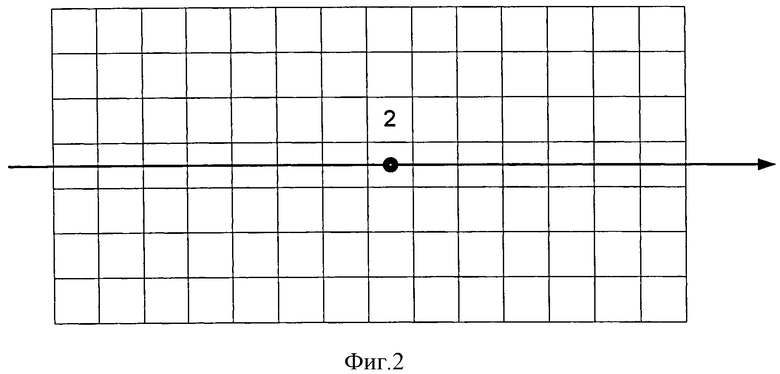
- на фигуре 2 представлено второе местоположение ДО в плановых координатах эталонной карты;
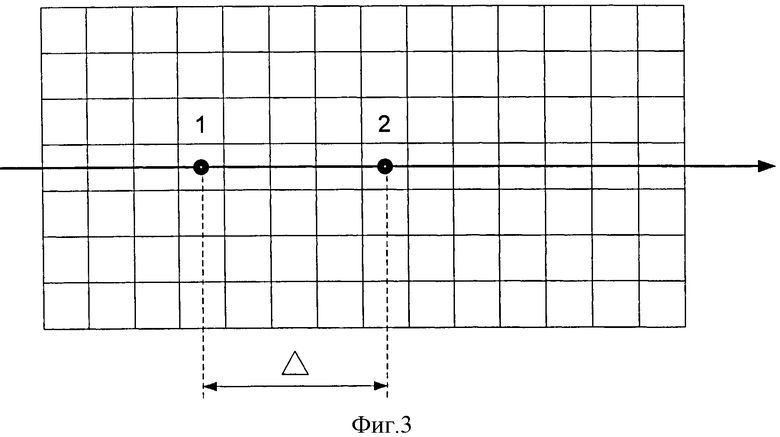
- на фигуре 3 показано смещение Δ в пикселах цифрового изображения текущей карты второго местоположения ДО относительно первого в плановых координатах эталонной карты;
- на фигуре 4 показано изменение размеров РО при изменении угла визирования к линии горизонта на угол θ=30°;
- на фигуре 5 показано изменение размеров РО при изменении угла визирования в азимутальной плоскости на угол α=30°;
- на фигуре 6 показано изменение размеров РО при изменении угла визирования в радиальной плоскости на угол β=30°;
- на фигуре 7 показано изменение размеров РО при уменьшении масштаба приближения;
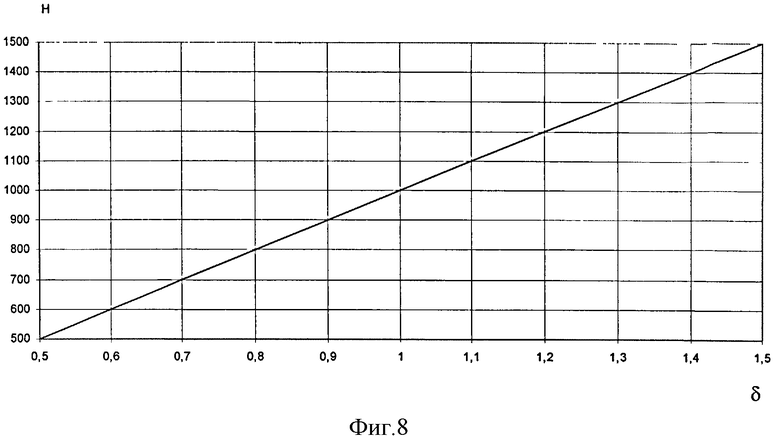
- на фигуре 8 представлен пример зависимости размера пиксела δ цифрового изображения текущей карты РО на текущей карте РО от высоты Н движения ДО при фиксированном количестве пикселов в цифровом изображении текущей карты РО;
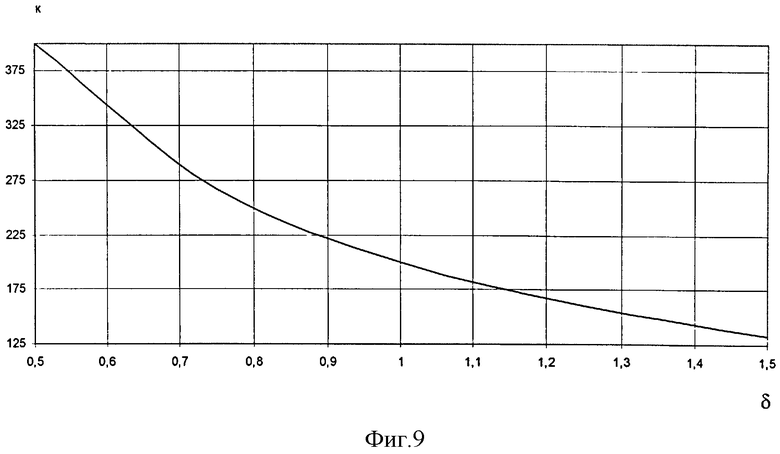
- на фигуре 9 представлен пример зависимости количества пикселов к цифрового изображения текущей карты РО в смещении Δ второго местоположения ДО относительно первого местоположения в плановых координатах эталонной карты от размера пиксела δ цифрового изображения текущей карты РО при фиксированном смещении Δ;
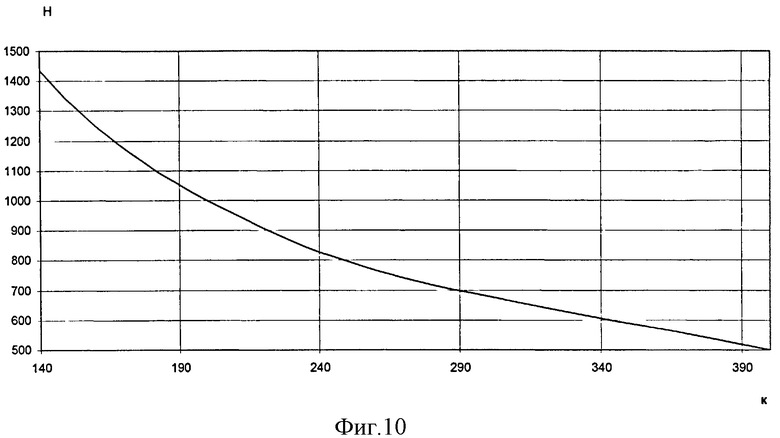
- на фигуре 10 представлен пример зависимости количества пикселов κ цифрового изображения текущей карты РО в смещении Δ второго местоположения ДО относительно первого местоположения в плановых координатах эталонной карты от высоты Н движения ДО.
На графиках: фиг.8, фиг.9, фиг.10 - величины размера пиксела δ цифрового изображения текущей карты РО и высоты Н движения ДО приведены в метрах.
Способ навигации ДО осуществляется следующим образом.
Используют информацию эталонной карты местности о навигационном поле Земли, содержащую цифровую информацию о местоположении и пространственных параметрах РО.
Выбирают участок местности на эталонной карте, который представляет собой мерный участок.
Выбирают на мерном участке РО, плановые координаты и пространственные параметры которого известны с наибольшей точностью. Используют эталонную карту мерного участка с выбранным РО.
Измеряют инерциальным способом текущие значения углов крена, тангажа и курса, а также скорости движения ДО.
Получают первую текущую карту РО при движении ДО над мерным участком в виде первого изображения мерного участка в одном или нескольких диапазонах длин волн в пассивном режиме работы.
Преобразуют первую текущую карту РО в первое цифровое изображение первой текущей карты РО.
Распознают РО на первом цифровом изображении первой текущей карты РО.
Определяют местоположение и пространственные параметры РО на первом цифровом изображении первой текущей карты РО.
Сравнивают эталонную и первую текущую карты РО путем их совмещения. Сравнение эталонной и первой текущей карт РО проводят путем подгонки пространственных параметров РО на первом цифровом изображении текущей карты РО до совпадения с пространственными параметрами РО на цифровом изображении эталонной карты РО. Сравнение выполняют с учетом информации об углах крена, тангажа и курса.
Определяют первое местоположение ДО в плановых координатах мерного участка эталонной карты (фиг.1).
Получают вторую текущую карту РО через интервал времени Δt после получения первой текущей карты РО при движении ДО над мерным участком в виде второго изображения мерного участка в одном или нескольких диапазонах длин волн в пассивном режиме работы.
Преобразуют вторую текущую карту РО во второе цифровое изображение текущей карты РО.
Распознают РО на втором цифровом изображении текущей карты РО.
Определяют местоположение и пространственные параметры РО на втором цифровом изображении текущей карты РО.
Сравнивают эталонную и вторую текущую карты РО путем их совмещения. Сравнение эталонной и второй текущей карт РО проводят путем подгонки пространственных параметров РО на втором цифровом изображении текущей карты РО до совпадения с пространственными параметрами РО на цифровом изображении эталонной карты РО. Сравнение выполняется с учетом информации об углах крена, тангажа и курса.
Определяют второе местоположение ДО в плановых координатах РО эталонной карты (фиг.2).
Определяют местоположение ДО по трем координатам (местоположение ДО по высоте в координатах эталонной карты и по плановым координатам эталонной карты). Местоположение ДО по высоте Н в координатах эталонной карты определяют путем измерения смещения Δ второго местоположения ДО относительно первого местоположения в плановых координатах эталонной карты (фиг.3) за время Δt в пикселах цифрового изображения к первой и второй текущих карт РО в направлении движения ДО. Значение высоты H получают при помощи базы данных, в которой значениям смещения Δ местоположения ДО в пикселах цифрового изображения текущей карты РО поставлены в соответствие значения высот Hi движения ДО (i=1, 2, 3, …) с учетом скорости движения ДО.
Вычисляют сигнал коррекции местоположения ДО на основе анализа полученной информации.
Управляют движением ДО путем коррекции его местоположения для обеспечения навигации.
Способ навигации ДО реализуется следующим образом.
Используют информацию эталонной карты местности, установленной на ДО до начала движения, о навигационном поле Земли, содержащую цифровую информацию о местоположении и пространственных параметрах РО. Каждый из РО является пространственно-распределенным или состоит из нескольких пространственно-распределенных объектов.
Выбирают на эталонной карте мерный участок, размеры которого определяются величиной допустимых отклонений ДО по плановым координатам.
Выбирают на мерном участке РО, плановые координаты и пространственные параметры которого известны с наибольшей точностью. Используют эталонную карту мерного участка с выбранным РО.
Измеряют инерциальным способом текущие значения углов крена, тангажа, курса и скорости.
Получают первую текущую карту РО при движении ДО над мерным участком в виде одного изображения мерного участка в одном или нескольких диапазонах волн, таких как в инфракрасном, видео- или радиодиапазонах (по одному изображению в каждом диапазоне) с помощью пассивных методов [5]. В радиодиапазоне, например, при помощи радиовидения [6]. Принимая излученный сигнал, например, в оптическом диапазоне длин волн, получают первую текущую карту РО.
Получают через временной интервал Δt после получения первой текущей карты РО вторую текущую карту РО при движении ДО над мерным участком.
Интервал времени Δt выбирают из условия

Значение tMIN определяют, исходя из условия необходимости прохождения не менее десяти ячеек эталонной карты (более чем на порядок больше погрешности определения местоположения РО) при движении ДО с минимально допустимой скоростью. При погрешности определения местоположения РО, равной одной ячейке эталонной карты tMIN,определяют исходя из условия необходимости прохождения десяти ячеек эталонной карты.
Значение tMAX определяют исходя из условия необходимости нахождения ДО в пределах мерного участка при движении ДО с максимально допустимой скоростью за время Δt.
Рассмотрим алгоритм определения местоположения ДО в плановых координатах мерного участка эталонной карты на примере алгоритма обработки первой текущей карты РО.
Преобразуют текущую карту РО в цифровое изображение текущей карты РО. Алгоритм преобразования включает следующие операции:
- совмещение центра цифрового изображения текущей карты РО с осью приемника ДО (направлением, перпендикулярным плоскости приемника, обеспечивающим прием сигнала с наибольшим значением);
- выбор размера цифрового изображения текущей карты РО равного полю зрения приемника ДО;
- определение размера каждого пиксела цифрового изображения текущей карты РО как отношения размера поля зрения приемника к числу пикселов по плановым координатам (x, y).
Выбор алгоритма преобразования в указанном виде позволяет получить однозначное соответствие местоположения каждого пиксела первого цифрового изображения текущей карты РО его угловому положению относительно оси приемника.
Преобразование РО на цифровом изображении текущей карты РО в соответствии с измеренными текущими значениями углов крена, тангажа и курса производят следующим образом:
- по значению текущих углов крена, тангажа и курса в момент получения текущей карты РО определяют смещение оси приемника ДО относительно вертикали, с помощью которого получают текущую карту РО (центра цифрового изображения текущей карты РО);
- совмещают центр цифрового изображения текущей карты РО с вертикалью оси приемника путем переноса центра цифрового изображения текущей карты РО в точку, соответствующую проекции вертикали на цифровом изображения текущей карты РО;
- уточняют размеры распознанного РО, вызванные текущими значениями углов крена, тангажа и курса;
- уточняют координаты центра тяжести распознанного РО в плановой системе координат (xC, yC) в соответствии с (2), а также пространственную ориентацию и размеры распознанного РО.
Определение координат центра тяжести РО в плановой системе координат проводят с использованием выражений

где i, j - абсцисса и ордината РО, S - площадь РО, hij - параметр, который равен единице, если точка принадлежит РО, и равен нулю, если точка не принадлежит ему.
Уточнение размеров распознанного РО, необходимое для учета текущих значений углов крена, тангажа и курса, производят следующим образом.
Изменение крена (угла визирования θ к линии горизонта) моделируют вращением РО в плоскости изображения. Для этого сначала производят перенос начала координат в центр описывающего РО прямоугольника (точка пересечения его диагоналей). Затем производят преобразование поворота. После чего производят возврат начала координат в первоначальную точку. Для уменьшения числа вычислений данное преобразование производится с помощью матриц преобразований. Поэтому сначала рассчитывают матрицу преобразования, а затем для каждой точки в описывающем прямоугольнике производят вычисление произведения вектора координат на матрицу преобразования

Здесь (x', y', w') - однородные трехмерные координаты точки на плоскости после преобразования; (x, y, w) - однородные трехмерные координаты точки на плоскости до преобразования; M - матрица преобразования в виде

Изменение размеров РО при изменении угла визирования к линии горизонта на угол θ=30° показано на фиг.4, на которой пунктиром показаны первоначальные размеры изображения РО, сплошной линией -размеры РО после преобразования.
Изменение курса (угла визирования α в азимутальной плоскости) моделируют трапециевидной деформацией РО с уменьшением правой или левой стороны при увеличении размеров РО по оси X большем, чем по оси Y. Размеры описывающего четырехугольника при этом определяются по следующим формулам
где dα - коэффициент деформации, определяемый как 
Изменение размеров РО при изменении угла визирования в азимутальной плоскости на угол α=30° показано на фиг.5, на которой пунктиром показаны первоначальные размеры изображения РО, сплошной линией - размеры РО после преобразования.
Изменение тангажа (угла визирования β в радиальной плоскости) моделируют трапециевидной деформацией РО с уменьшением верхней или нижней стороны при увеличении размеров РО по оси X большем, чем по оси Y. Размеры описывающего четырехугольника определяют в виде
где dβ - коэффициент деформации, определяемый как 
Изменение размеров РО при изменении угла визирования в радиальной плоскости на угол β=30° показано на фиг.6, на которой пунктиром показаны первоначальные размеры изображения РО, сплошной линией - размеры РО после преобразования.
Распознают РО на первом цифровом изображении текущей карты РО. Распознавание производят с помощью трехэтапной обработки цифрового изображения текущей карты РО. На первом этапе (этап сегментации) осуществляют разбиение текущей карты РО на составляющие его образы. На втором этапе (этапе формирования аналитического описания) для каждого образа рассчитывают набор классификационных признаков. На третьем этапе (этапе классификации) на основе полученных наборов классификационных признаков производят распознавание (классификацию) РО с учетом его пространственной ориентации.
Определяют местоположение и пространственные параметры РО на первом цифровом изображении текущей карты РО.
Определяют координаты центра тяжести РО в плановой системе координат (xC, yC) первого цифрового изображения текущей карты РО для расчета параметров его местоположения.
Определяют пространственную ориентацию РО посредством построения большой и малой главных осей распознанного РО, проведенных через его центр тяжести. Угловое положение РО определяют посредством построения большой и малой главных осей в плановой системе координат цифрового изображения текущей карты РО. Размеры РО определяют посредством измерения длины большой и малой главных осей распознанного РО.
Определяют параметры РО на первом цифровом изображении текущей карты РО.
Сравнивают эталонную и первую текущую карты РО путем их совмещения. Совмещение эталонной и текущей карт (подгонку параметров РО на цифровом изображении текущей карты РО до совпадения с параметрами РО на цифровом изображении эталонной карты РО) производят следующим образом:
- преобразуют РО на цифровом изображении текущей карты РО (местоположение, пространственная ориентация и размеры РО) в соответствии с измеренными текущими значениями углов крена, тангажа и курса;
- масштабируют РО (изменяют масштаб приближения к РО) на цифровом изображении текущей карты РО по отношению к РО на цифровом изображении эталонной карты РО;
- совмещают по пространственной ориентации (по пространственным параметрам) РО на цифровом изображении текущей карты РО и на цифровом изображении эталонной карты РО;
- совмещают по местоположению (по плановым координатам) РО на цифровом изображении текущей карты РО и на цифровом изображении эталонной карты РО.
Масштабирование РО на цифровом изображении текущей карты РО по отношению к РО на цифровом изображении эталонной карты РО производят равномерным увеличением размеров РО по осям x и y (большой и малой главных осей распознанного РО), причем одновременно выполняются следующие условия

Здесь W' и H' - ширина и высота прямоугольника, описанного вокруг РО, после преобразования (в пикселях); W и H - ширина и высота прямоугольника, описанного вокруг РО, до преобразования (в пикселях); Dx и Dy - коэффициенты масштабирования (оба больше единицы).
Изменение размеров РО при уменьшении масштаба приближения показано на фиг.7, на которой пунктиром показаны первоначальные размеры изображения РО, сплошной линией - размеры РО после преобразования.
Совмещение по пространственной ориентации (по пространственным параметрам) РО производят совмещением (поворотом) РО (большой и малой главных осей распознанного РО) на цифровом изображении текущей карты РО с РО (большой и малой главными осями РО) на цифровом изображении эталонной карты РО.
Совмещение по местоположению (по плановым координатам) РО производят следующим образом:
- уточняют координаты центра тяжести распознанного РО в плановой системе координат в соответствии с (2);
- совмещают местоположение РО (координаты центра тяжести распознанного РО) на цифровом изображении текущей карты РО с РО (координаты центра тяжести РО) на цифровом изображении эталонной карты РО.
Указанные преобразования обеспечивают совмещение эталонной и текущей карт - подгонку параметров РО на цифровом изображении текущей карты РО до совпадения с параметрами РО на цифровом изображении эталонной карты РО.
Определяют по результатам совмещения пространственное смещение РО на первом цифровом изображении текущей карты РО по отношению к РО на цифровом изображении эталонной карты РО и смещение местоположения ДО в плановых координатах мерного участка (фиг.3).
Операции, аналогичные рассмотренным выше, проводят и для второй текущей карты РО.
Смещение Δ второго местоположения ДО относительно первого местоположения в плановых координатах эталонной карты за интервал времени Δt в пикселах цифрового изображения первой и второй текущих карт РО изменяется в зависимости от высоты движения ДО: чем больше высота движения H ДО над местностью, тем больше значение смещения Δ. Поэтому до начала движения составляют базу данных, в которой отражена связь высот Hi движения ДО и смещений Δi ДО: Н=ƒ(Δ). Одновременно в базе данных отражена связь скоростей Vi движения ДО и смещений Δi ДО: V=ƒ(Δ).
Значение высоты H движения ДО получают при помощи базы данных, используя зависимость вида H=ƒ(Δ). Причем при определении высоты H как функции смещения Δ (в пикселах) значение скорости V движения ДО используют для внесения соответствующей поправки в полученное значение высоты H.
Вычисляют сигнал коррекции местоположения ДО на основе анализа полученной информации.
Управляют движением ДО путем коррекции его местоположения.
Рассмотрим алгоритм определения местоположения ДО по высоте в координатах эталонной карты на примере обработки текущей карты РО в оптическом диапазоне длин волн при следующих условиях движения и характеристиках ДО.
Угол γ обзора приемного устройства постоянный. Размер матрицы цифрового изображения текущей карты РО b×b=1000×1000 пикселов (количество пикселов в цифровом изображении текущей карты РО - 1000×1000). Неопределенность по местоположению ДО перед проведением измерений по предлагаемому способу - 1000 м. Скорость движения ДО V=200 м/с, временной интервал получения изображений Δt=1 с. За это время ДО пройдет расстояние в 200 м. Диапазон возможных высот движения ДО выберем от 500 до 1500 м.
На основе рассмотренных исходных данных были получены следующие графики зависимостей:
- зависимость размера пиксела δ цифрового изображения текущей карты РО на текущей карте РО от высоты H движения ДО при фиксированном количестве пикселов в цифровом изображении текущей карты РО (фиг.8);
- зависимость количества пикселов κ цифрового изображения текущей карты РО в смещении Δ второго местоположения ДО относительно первого местоположения в плановых координатах эталонной карты от размера пиксела δ цифрового изображения текущей карты РО при фиксированном смещении Δ (фиг.9);
- зависимость количества пикселов κ цифрового изображения текущей карты РО в смещении Δ второго местоположения ДО относительно первого местоположения в плановых координатах эталонной карты от высоты H движения ДО (фиг.10).
На графиках: фиг.8, фиг.9, фиг.10 - величины размера пиксела δ цифрового изображения текущей карты РО и высоты H движения ДО приведены в метрах.
В таблице 1 приведен фрагмент базы данных, рассчитанной в соответствии с зависимостью количества пикселов κ цифрового изображения текущей карты РО в смещении Δ второго местоположения ДО относительно первого местоположения в плановых координатах эталонной карты от высоты H движения ДО, показанной на фиг.10.
Оценка данных, приведенных в таблице 1, показывает, что погрешность определения высоты по предложенному способу составляет единицы метров (по данным таблицы 1 - не более 2 м).
Результаты, представленные на графиках фиг.8, фиг.9 и фиг.10, получены для заданного значения скорости движения ДО. Это означает, что при наличии иной скорости движения ДО необходим пересчет значений количества пикселов в смещении для действующего значения скорости, то есть необходима коррекция значений смещения. Поэтому в базе данных отражена связь скоростей Vi движения ДО и количества пикселов κi в смещении Δi ДО: V=ƒ(κ).
Данная зависимость определяется выражением

где κкорр - скорректированное количество пикселов в смещении;
κдейств - количество пикселов в смещении для действующего значения скорости движения ДО;
Vзадан - заданное значение скорости движения ДО;
Vдейств - действующее значение скорости движения ДО.
Так, если действующее значение скорости движения ДО составило Vдейств=210 м/с, значение количества пикселов в смещении для действующего значения скорости составило κдейств=390 при заданном значении скорости движения ДО Vзадан=200 м/с, то скорректированное количество пикселов в смещении составит κкорр=312 (округление до ближайшего целого в большую сторону), которое и должно быть использовано для определения высоты H.
Таким образом, предлагаемый способ навигации движущихся объектов обладает рядом значительных преимуществ перед известными способами навигации, поскольку позволяет определить на основе двух текущих карт местоположение по трем координатам движения ДО, что существенно дополняет возможности способа навигации и позволяет повысить точность определения поправок местоположения ДО.
Отметим, что предлагаемый способ навигации движущихся объектов обладает рядом преимуществ перед известными способами навигации, поскольку позволяет повысить помехоустойчивость. Эти существенные отличия обеспечиваются за счет определения поправок местоположения ДО только по двум цифровым изображениям распознанного реперного объекта, а также путем использования только пассивных методов получения текущих карт реперного объекта.
Отметим, что способ основан на использовании только цифровых карт и цифровых методов обработки информации и изображений.
Литература
1. Цыпкин Я.З., Попков Ю.С. Теория нелинейных импульсных систем. - М.: Наука, 1973.
2. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. - М.: Сов. радио, 1974.
3. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. - М.: Радиотехника, 2005. - 688 С.
4. Патент №2406071 РФ, МПК G01C 21/30 (2006.01). Способ навигации движущихся объектов / Хрусталев А.А., Кольцов Ю.В., Ляпин А.И. // Ретроспективный комплект описаний изобретений за 2010 г. на DVD (Опубл. 10.12.2010. - Бюл. №34) (прототип).
5. Алексеев Е.Г., Банкгальтер Р.И., Курилкин В.В., Моченов В.А. Оценка качества функционирования интегральной оптико-радиолокационной головки самонаведения // Радиотехника. - 2004. - №11. - С.3-11.
6. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. - М.: Радиотехника, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2011 |
|
RU2481557C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2009 |
|
RU2406071C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2515469C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2426073C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2014 |
|
RU2559820C1 |
| Способ навигации движущихся объектов | 2016 |
|
RU2623452C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2008 |
|
RU2385468C1 |
| Способ навигации летательных аппаратов | 2016 |
|
RU2611564C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2680969C1 |
Изобретение относится к области навигации движущихся объектов и может быть использовано при построении различных систем локации, предназначенных для определения местоположения движущихся объектов (ДО), управления их движением и обеспечения навигации ДО. Технический результат состоит в обеспечении возможностей определения высоты движения ДО. Для этого выбирают на эталонной карте мерный участок с реперным объектом (РО), плановые координаты и пространственные параметры которого известны с наибольшей точностью. Получают первую текущую карту РО при движении ДО над мерным участком, которую преобразуют в цифровое изображение текущей карты РО. Распознают РО, определяют его местоположение и пространственные параметры. Сравнивают эталонную и первую текущую карты РО путем их совмещения. Определяют первое местоположение ДО в плановых координатах эталонной карты. Определяют второе местоположение ДО в плановых координатах эталонной карты. Определяют высоту движущегося объекта над эталонной картой путем определения взаимного смещения за время Δt первого и второго местоположений движущегося объекта в пикселах цифрового изображения текущей карты реперного объекта в направлении движения движущегося объекта. Для этого используют базу данных, установленную на движущемся объекте. Вычисляют сигнал коррекции местоположения ДО, который используют для управления движением ДО путем коррекции его местоположения для обеспечения навигации. 10 ил.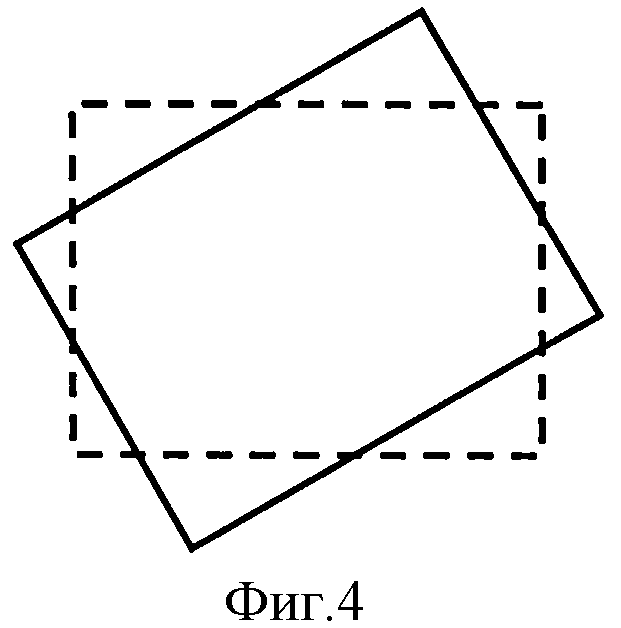
Способ навигации движущихся объектов, заключающийся в получении текущей карты реперного объекта, определении местоположения движущегося объекта в плановых координатах эталонной карты, вычислении сигнала коррекции траектории движения и управлении движением движущегося объекта путем коррекции его местоположения для обеспечения навигации движущихся объектов, причем определение местоположения движущегося объекта в плановых координатах эталонной карты осуществляют путем использования эталонной карты местности, содержащей реперные объекты, координаты которых известны, выбора одного реперного объекта, находящегося в пределах эталонной карты, который является пространственно-распределенным или состоящим из нескольких пространственно-распределенных объектов, получения текущей карты выбранного реперного объекта в одном или нескольких диапазонах длин волн, преобразования текущей карты реперного объекта в цифровое изображение текущей карты реперного объекта, распознавания реперного объекта на цифровом изображении текущей карты реперного объекта, определения местоположения и пространственных параметров реперного объекта на цифровом изображении текущей карты реперного объекта, сравнения эталонной и текущей карт реперного объекта путем подгонки пространственных параметров реперного объекта на цифровом изображении текущей карты реперного объекта до совпадения с пространственными параметрами реперного объекта на цифровом изображении эталонной карты реперного объекта, отличающийся тем, что для вычисления сигнала коррекции получают вторую текущую карту реперного объекта через интервал времени Δt после получения первой текущей карты реперного объекта, определяют второе местоположение движущегося объекта в плановых координатах эталонной карты, определяют местоположение движущегося объекта по высоте над эталонной картой в координатах эталонной карты путем измерения смещения в пикселах цифрового изображения текущей карты реперного объекта второго местоположения движущегося объекта относительно первого местоположения в плановых координатах эталонной карты за интервал времени Δt в направлении движения движущегося объекта, используя базу данных, установленную на движущемся объекте, в которой значениям смещения местоположения движущегося объекта в пикселах цифрового изображения текущей карты реперного объекта поставлены в соответствие значения высот движения движущегося объекта.
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2009 |
|
RU2406071C1 |
| ПОЗИЦИОНИРОВАНИЕ ДЛЯ WLAN И ДРУГИХ БЕСПРОВОДНЫХ СЕТЕЙ | 2006 |
|
RU2390791C2 |
| УСТРОЙСТВО И СПОСОБ ПРЕДСТАВЛЕНИЯ ТРЕХМЕРНОГО ОБЪЕКТА НА ОСНОВЕ ИЗОБРАЖЕНИЙ С ГЛУБИНОЙ | 2002 |
|
RU2237283C2 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |

