Изобретение относится к системам сбора и обработки геофизической информации и предназначено для организации электромагнитного мониторинга сейсмоактивных зон земной коры методами активной электроразведки, в частности методом зондирования становлением поля (ЗС), с целью дальнейшего осуществления прогноза землетрясений.
Известна цифровая радиотелеметрическая система сбора и обработки информации, разработанная для оснащения экспериментальных полигонов с магнитогидродинамическими установками или специальными электроимпульсными установками по предсказанию землетрясений на территории Средней Азии [Гройсман Ф.Е., Трапезников Ю.А. Аппаратурные разработки для геофизических исследований электромагнитными методами. - М.: ИФЗ АН СССР, 1986, с.86-98]. Данная радиотелеметрическая система сбора и обработки информации состоит из сети (порядка двадцати) автономных цифровых станций сбора геофизической информации (электроразведочных станций), генераторной установки и центра обработки данных, предназначенного для управления сетью базовых автономных станций и генераторной установкой, контроля их работы, обработки экспериментальных данных.
Основными недостатками электроразведочной системы для прогноза землетрясений являются ограниченные возможности ее использования при организации геофизического мониторинга на больших площадях, особенно в условиях горной местности, когда радиолинии, связывающие автономные электроразведочные станции с центром обработки данных, работающие только в условиях прямой видимости, не позволяют располагать приемные измерительные станции на значительных расстояниях от центра обработки.
Наиболее близкой к изобретению является геофизическая система сбора и обработки информации [Патент Российской Федерации на изобретение №2091820, кл. G01V 3/08, 1/22, 1997], разработанная в Научной станции Российской Академии наук и используемая на геодинамическом полигоне, расположенном в районе г.Бишкек Киргизской Республики для проведения научных исследований и экспериментов.
Указанная геофизическая система сбора и обработки информации состоит из центра управления и сбора информации (ЦУСИ), генераторной установки (ГУ), ряда автоматических измерительных, промежуточных измерительных и ретрансляционных пунктов, соединенных с ЦУСИ по разветвленно-лучевой схеме с помощью приемопередающих устройств (радиомодемов), входящих в состав каждого из пунктов. В составе каждого пункта системы за исключением ретрансляционного помимо радиомодема предусмотрена цифровая измерительная станция (ЦИС), состоящая из блока обработки данных, совмещенного с блоком управления, и выполненных в виде микро-ЭВМ, к которому через внутрисистемную шину обмена подключены аналого-цифровой преобразователь (АЦП), генератор тестовых сигналов (ГТС) и блок измерительных усилителей (БИУ), в свою очередь соединенный с блоком геофизических датчиков (БД). Работа геофизической системы сбора и обработки информации осуществляется в автоматическом режиме в соответствии с заданной программой измерений по командам, передаваемым на измерительные пункты от ЦУСИ. На приемных измерительных пунктах получаемые по радиолиниям связи команды расшифровываются с помощью микро-ЭВМ и далее осуществляется последовательная автоматическая работа пункта под управлением микро-ЭВМ в следующих режимах:
1. Установка параметров (паспортных данных) и режимов работы измерительной станции, тестирование блоков и узлов измерительной аппаратуры с сохранением результатов тестирования в оперативной памяти микро-ЭВМ.
2. Пуск измерительного сеанса, осуществляемый по команде от ЦУСИ на всех измерительных пунктах одновременно с началом работы генераторной установки. Регистрация и предварительная обработка сигналов, поступающих от геофизических датчиков.
3. Передача зарегистрированных и предварительно обработанных в измерительном пункте сигналов геофизических датчиков и результатов тестирования измерительной аппаратуры в ЦУСИ для дальнейшей их обработки и анализа.
Одним из главных недостатков вышеуказанной системы является низкая точность синхронизации процесса измерения сигналов, поступающих с датчиков на приемных измерительных станциях, с работой зондирующей генераторной установки, обеспечивающей формирование последовательности токовых импульсов в земной коре с заданными параметрами (величина тока, полярность, длительность импульса, длительность паузы, период повторения). Низкая точность синхронизации измерений приемными измерительными станциями обусловлена сложностью учета временных задержек при передаче по радиоканалам связи команды пуска измерений, а также недостаточной стабильностью и разбросом частот генераторов тактовых импульсов, входящих в состав аппаратуры генераторной установки и приемных измерительных станций, которые определяют временные параметры излучаемой генераторной установкой импульсной последовательности (период повторения, длительность импульсов, длительность пауз между импульсами) и параметры обработки регистрируемых сигналов (период дискретизации, длительность регистрации, длительность накопленных сигналов). Низкая точность синхронизации приводит к высоким погрешностям измерения отсчетов накопленных сигналов при проведении электромагнитного мониторинга земной коры методом зондирования становлением поля, особенно на ранних временах становления поля в точках приема, когда наблюдаются максимальные скорости изменения регистрируемых сигналов.
Технический результат изобретения - повышение точности измерения сигналов электромагнитного поля в системах активного электромагнитного мониторинга сейсмоактивных зон земной коры.
Технический результат достигается тем, что в состав приемных цифровых измерительные станций и генераторной установки известной геофизической системы сбора и обработки информации, содержащей центр управления, сбора и обработки информации, соединенный по разветвленно-лучевой схеме с помощью радиолиний связи с генераторной установкой и сетью измерительных пунктов, введены приемник спутниковой навигационной системы, прецизионный термостабилизированный, управляемый напряжением кварцевый генератор тактовых импульсов (ГТИ) и блок формирования управляющего напряжения для точной подстройки частоты (БФНПЧ) генератора тактовых импульсов по сигналам приемника спутниковой навигационной системы. С помощью введенных устройств и блоков, входящих в состав генераторной установки и каждой измерительной станции, перед каждым измерительным сеансом под управлением микро-ЭВМ обеспечивается точная подстройка частоты генераторов тактовых импульсов, определяющих временные параметры токовых зондирующих импульсов и соответствующие параметры регистрации сигналов на приемной стороне. Эталоном времени при подстройке частоты генераторов тактовых импульсов служит период повторения синхроимпульсов длительностью 1 сек, вырабатываемых приемником спутниковой навигационной системы и обладающих высокой точностью и стабильностью параметров. Кроме того, наличие в составе аппаратуры генераторной установки и приемных цифровых измерительных станций приемника спутниковой навигационной системы обеспечивает высокую точность синхронизации во времени начала процессов регистрации сигналов в точках приема с началом зондирования земли токовыми импульсами.
Синхронизация начала измерительного сеанса во времени на приемных измерительных пунктах с началом работы генераторной установки и точная подстройка частоты генераторов тактовых импульсов приемных измерительных станций и генераторной установки обеспечивают значительное повышение точности измерения отчетов сигналов приемными измерительными станциями.
Погрешность начальной синхронизации определяется точностью выдачи во времени последовательности синхроимпульсов (СХ) приемником спутниковой навигационной системы. Абсолютная погрешность временной привязки импульсов СХ согласно паспортным данным на такие приемники не превышает ±1 мкс, что при максимально возможной скорости изменения уровня сигнала в измерительных каналах порядка 0,1 В/мс, определяемой минимальной длительностью фронта (0,024 сек) переходных характеристик этих каналов, приводит к абсолютной погрешности измерения отчетов регистрируемых сигналов не более 0,2 мВ, что составляет 0,004% от полной шкалы (1,25 В) используемых для измерения аналого-цифровых преобразователей. Такой уровень погрешности измерения удовлетворяет условиям измерения практически всех синхронных отсчетов регистрируемого сигнала.
С целью улучшения соотношения сигнал/шум и устранения влияния медленных временных трендов при использовании метода ЗС регистрируемые приемными измерительными станциями сигналы подвергаются предварительной обработке в реальном времени с использованием известного алгоритма синхронного весового накопления [Волыхин А.М., Брагин В.Д., Зубович А.В., Трапезников Ю.А. и др. Проявление геодинамических процессов в геофизических полях. - М.: Наука, 1993, с.67-73], реализуемого с помощью микро-ЭВМ, входящих в состав приемных измерительных станций. Суть алгоритма весового синхронного накопления заключается в том, что на приемной стороне цифровые отчеты сигналов датчиков, предварительно отфильтрованных от помех аналоговыми фильтрами, подвергаются накоплению (суммированию) с периодом повторения, точно согласованным с периодом повторения зондирующих токовых импульсов, вырабатываемых генераторной установкой. При этом на каждом текущем полупериоде значения накапливаемых отчетов сигналов умножаются на соответствующий весовой коэффициент. Коэффициенты определяются весовой функцией (окном), рассчитанной из условия устранения постоянной составляющей и медленных временных трендов, присутствующих в регистрируемом сигнале. При этом используется математическая модель временных трендов в виде степенного полинома n-го порядка. На практике для аппроксимации трендов достаточно использования полиномов второго или третьего порядков. Результат накопления делится на число накапливаемых отсчетов и на сумму коэффициентов весовой функции, взятых по модулю. Таким образом, после выполнения процедуры синхронного весового накопления формируется сигнал, по длительности совпадающий с полупериодом зондирующих импульсов, в котором влияние временных трендов устранено, а высокочастотных шумов и помех сильно ослаблено.
Число накоплений синхронных отчетов сигналов определяется допустимой погрешностью, вносимой в измерение шумами и помехами. При этом абсолютное значение погрешности многократного измерения постоянного (неменяющегося) уровня сигнала на фоне нормально распределенных помех, а это условие выполняется, т.к. производится многократное накопление синхронных отсчетов, измеряемых на фоне собственных шумов аппаратуры и естественных магнитотеллурических помех, имеющих нормальное распределение амплитуд, определяется формулами:
где Δх - абсолютная погрешность измерения отсчета сигнала;
xi - i-й накапливаемый синхронный отсчет измеряемого сигнала;
 - среднеквадратичное отклонение многократного измерения сигнала;
- среднеквадратичное отклонение многократного измерения сигнала;
 - среднее значение измеряемого сигнала;
- среднее значение измеряемого сигнала;
n - число накоплений измеряемого сигнала;
k - коэффициент, определяющий доверительную вероятность измерений (Р). При k=2 доверительная вероятность составит Р=0,95, а при k=3 Р=0,997. В технических расчетах принято выбирать Р=0,95.
За счет накопления синхронных отсчетов погрешность измерения отсчетов сигналов, вносимая влиянием шумов и помех, присутствующих в измерительных каналах, может быть снижена до заданного уровня. Например, при входном соотношении сигнал/шум 3 для снижения доли погрешности, вносимой нормальными шумами и помехами до уровня 0,1%, т.е. для улучшения соотношения сигнал/шум в 300 раз потребуется накопление не менее 300 синхронных отсчетов сигнала.
С другой стороны, накопление синхронных отсчетов сигналов приводит к повышению погрешности, возникающей за счет временного рассогласования излучаемых сигналов с сигналами, регистрируемыми на приемной стороне. Чем больше число накапливаемых отсчетов, тем более точно во времени должны быть синхронизированы процессы излучения токовых импульсов генераторной установкой и процессы регистрации сигналов в приемных пунктах. Погрешность измерения отсчетов сигналов, связанная с неточностью установки частоты генераторов тактовых импульсов, с учетом применения алгоритма весового синхронного накопления и принятой упрощенной модели сигнала становления поля в точке приема в виде линейной функции времени с заданной максимальной скоростью изменения, определяется по формуле:
 ,
,
где δU - относительная погрешность измерения отсчетов сигналов;
δf - относительная погрешность установки частоты генератора тактовых импульсов;
Т0 - точное значение периода повторения зондирующих токовых импульсов;
ΔtД - точное значение периода дискретизации сигналов;
N - количество накапливаемых синхронных отсчетов сигнала;
k - номер синхронного отсчета сигнала, отсчитываемый от начала периода повторения импульсов.
Тогда необходимая относительная погрешность установки частоты генератора тактовых импульсов определяется формулой:
Для обеспечения заданного значения доверительной вероятности измерения 0,997 погрешность измерения отсчетов сигналов (δU) должна быть как минимум в три раза меньше задаваемой точности измерения отсчетов сигнала. Максимальная относительная погрешность измерения амплитуды синхронных отсчетов наблюдается при прочих равных условиях для первого синхронного отсчета (k=1). Для конкретных значений параметров накопления δU=0,0023; ΔtД=1,25·10-3 сек; Т0=5 сек; k=1; N=360 относительная погрешность установки частоты генератора тактовых импульсов составит δf=3,2·10-9.
С учетом того, что на генераторной установке период повторения зондирующих сигналов (Т0) устанавливается также с погрешностью, то для достижения требуемой погрешности измерения необходимо рассчитанную относительную погрешность установки частоты генераторов тактовых импульсов, входящих в состав генераторной установки и приемных измерительных станций, уменьшить как минимум в два раза. Тогда требуемая абсолютная погрешность установки частоты генератора тактовых импульсов определится по формуле Δf=f0·δf/2, где f0 - абсолютное точное значение частоты генератора тактовых импульсов. Так, для генератора с частотой f0=16384000 Гц погрешность установки частоты должна составлять Δf=0,0262 Гц. Такую высокую точность установки и поддержания частоты можно обеспечить только путем применения термостабилизированных кварцевых генераторов при условии дополнительной их подстройки перед каждым измерительным сеансом.
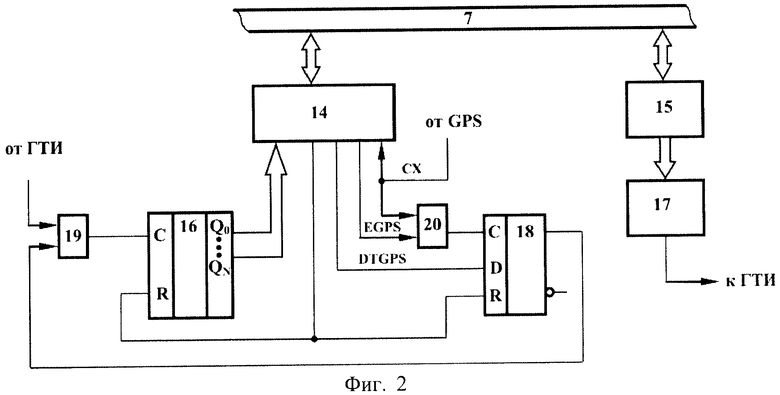
На фиг.1 приведена схема приемного измерительного пункта системы активного электромагнитного мониторинга сейсмоактивных зон земной коры; на фиг.2 - схема блока формирования управляющего напряжения для точной подстройки частоты генератора тактовых импульсов по сигналам приемника спутниковой навигационной системы.
Предлагаемая система активного электромагнитного мониторинга сейсмоактивных зон земной коры, как и в случае прототипа, состоит из центра управления и сбора информации, который связан двунаправленными радиолиниями по разветвленно-лучевой схеме с генераторной установкой и рядом автоматических измерительных, промежуточных измерительных и ретрансляционных пунктов. Радиосвязь осуществляется с помощью двунаправленных радиомодемов (12), подключенных к радиоантеннам (13), входящих в состав каждого измерительного, промежуточного измерительного и ретрансляционного пунктов, а также в состав генераторной установки при значительном ее удалении от ЦУСИ. Отличие от прототипа заключается в том, что в состав аппаратуры генераторной установки и приемных измерительных пунктов системы электромагнитного мониторинга вводятся дополнительные блоки и устройства. В частности, в схему цифровой измерительной станции (1) приемного измерительного пункта, состоящую из блока измерительных усилителей (2), входами связанного с блоком датчиков электромагнитного поля (3) приемного пункта, генератора тестовых сигналов (4), выход которого подключен к блоку датчиков (3), аналого-цифрового преобразователя (5), входы которого подключены к выходам блока измерительных усилителей (2), микро-ЭВМ (6), связанной с помощью двунаправленной внутрисистемной общей шины обмена (7) с блоками и устройствами измерительного пункта, вводится приемник спутниковой навигационной системы (8), прецизионный термостабилизированный управляемый напряжением генератор тактовых импульсов (9) и блок формирования напряжения подстройки частоты (10) для генератора тактовых импульсов. При этом приемник спутниковой навигационной системы (8) подключается к микро-ЭВМ (6) с помощью двунаправленных линий последовательного интерфейса (типа RS-232C), а сигналы с выхода синхронизации (СХ) этого приемника (8) поступают в блок формирования напряжения подстройки частоты (10), который в свою очередь связан с микро-ЭВМ (6) посредством двунаправленной внутрисистемной общей шины обмена (7). Выходной сигнал блока формирования напряжения подстройки частоты (10) в виде регулируемого напряжения постоянного тока поступает на вход управления генератора тактовых импульсов (9), выход которого подключен по цепи обратной связи к входу блока формирования напряжения подстройки частоты (10) и к входу аналого-цифрового преобразователя (5) для синхронизации его работы. Блок формирования напряжения подстройки частоты (10) состоит из двух устройств ввода-вывода (14, 15), двоичного счетчика импульсов (16), цифроаналогового преобразователя (17), синхронного D-триггера (18) и двух логических элементов И (19, 20). При этом вход устройства ввода-вывода (14) подключен к выходам двоичного счетчика (16), осуществляющего подсчет импульсов генератора тактовых импульсов (9), пропускаемых на его вход через двухвходовый логический элемент И (19), на один вход которого поступают импульсы с выхода генератора тактовых импульсов (9), а на другой - строб-сигнал с выхода синхронного D триггера 18, формируемый по сигналам управления, поступающим на его входы с выходов устройства ввода-вывода (14) и логического элемента И (20). При этом на входы R синхронного D-триггера (18) и двоичного счетчика импульсов (16) с выхода устройства ввода-вывода (14) подается импульс, обеспечивающий начальную установку выходов счетчика и синхронного триггера в нулевое состояние. На вход D синхронного триггера (18) подается логический сигнал DTGPS с выхода устройства ввода-вывода (14), формируемый под управлением микро-ЭВМ (6) в соответствии с алгоритмом подстройки частоты генератора тактовых импульсов, при этом на вход С поступают импульсы с выхода логического элемента И (20), обеспечивающего пропускание синхроимпульсов СХ с выхода GPS приемника при условии подачи на вход этого элемента разрешающего логического сигнала EGPS (уровнем логической единицы), формируемого на выходе устройства ввода-вывода (14) также под управлением микро-ЭВМ в соответствии с алгоритмом, обеспечивающим подстройку частоты генератора тактовых импульсов (9). Выходы второго устройства ввода-вывода (15) подключены к входам цифроаналогового преобразователя (17), на выходе которого формируется сигнал в виде напряжения постоянного тока, подаваемый на вход управления генератора тактовых импульсов (9). Устройства ввода-вывода (14, 15) связаны с микро-ЭВМ (6) посредством двунаправленной внутрисистемной шины обмена (7), обеспечивая тем самым программное управление работой схемы блока формирования напряжения подстройки частоты (10) по алгоритму, хранящемуся в памяти микро-ЭВМ.
Аналогичные дополнительные блоки и устройства вводятся в состав аппаратуры зондирующей генераторной установки, состоящей из силовой части и системы управления и диагностики, в состав которой входит управляющая микро-ЭВМ (микропроцессорный блок). Отличие от приемных пунктов заключается только в том, что выходные импульсы генератора тактовых импульсов используются системой управления и диагностики для формирования сигналов управления работой силовой части генераторной установки (электроимпульсной системы).
Система активного электромагнитного мониторинга сейсмоактивных зон земной коры работает так же, как и в случае прототипа, за исключением процедур запуска процесса формирования токовых импульсов генераторной установкой синхронно с пуском измерений на приемных измерительных пунктах, которые осуществляются не по командам, поступающим от центра управления и сбора информации через радиоканалы связи, а по абсолютному времени, задаваемому в паспорте экспериментов и контролируемому с помощью данных и сигналов, поступающих от приемников спутниковой навигационной системы. Кроме того, каждый сеанс измерения предваряется процессом точной подстройки частоты генераторов тактовых импульсов, входящих в состав аппаратуры приемных измерительных пунктов и генераторной установки. Как и в случае прототипа, радиоканалы, связывающие центр управления и сбора информации с измерительными пунктами, обеспечивают передачу от ЦУСИ и установку на этих пунктах и генераторной установке перед каждым измерительным сеансом параметров и режимов их работы, а также по окончании измерительного сеанса по радиоканалам осуществляется передача зарегистрированных и предварительно обработанных данных с измерительных пунктов в ЦУСИ.
Специально разработанное программное обеспечение, работающее в диалоговом режиме, позволяет оперативно задавать и корректировать структуру измерительной сети, представляемую в виде топологической схемы, и ее характеристики. Структура измерительной сети задается в виде списка измерительных пунктов, участвующих в экспериментах, и графика времен проведения измерительных сеансов. Процедура настройки сети на измерительный сеанс заключается в последовательном включении по командам, передаваемым по радиоканалам связи с ЦУСИ, соответствующих приемопередающих устройств на измерительных, промежуточных измерительных и ретрансляционных пунктах, подаче питания на измерительные станции этих пунктов и передаче на них команд управления, обеспечивающих настройку параметров измерительных каналов. На генераторной установке также проводится подготовка аппаратуры к работе. Включается питание системы управления ГУ и задаются параметры зондирующих импульсов. Кроме того, перед каждым измерительным сеансом на приемных измерительных пунктах и генераторной установке отводится дополнительное время, необходимое для выполнения процедур подстройки частоты генераторов тактовых импульсов.
Работа системы при выполнении процедуры подстройки частоты ГТИ осуществляется следующим образом. После включения питания измерительной станции (1) производится выдержка времени (порядка 5 минут) для того, чтобы система термостабилизации (термостат) кварцевого генератора тактовых импульсов (9) вышла на стационарный участок регулирования температуры. Далее по программе, хранящейся в памяти микро-ЭВМ (6), начинается процесс подстройки частоты ГТИ (9) под эталонное значение. В качестве эталонного интервала времени при подстройке частоты используется период повторения синхроимпульсов СХ (длительностью 1 сек) с выхода приемника спутниковой навигационной системы (8), высокая точность которого гарантируется при условии обнаружения этим приемником хотя бы одного спутника навигационной системы. Приемник спутниковой навигационной системы (8) с помощью подключенной к нему магнитной антенны (11) осуществляет поиск и обнаружение сигналов от спутников и постоянно по линиям связи передает в микро-ЭВМ (6) свое состояние. При обнаружении хотя бы одного спутника осуществляется передача точного времени в микро-ЭВМ (6). При этом передаваемое в микро-ЭВМ (6) абсолютное значение точного времени соответствует началу текущего периода импульсной последовательности СХ.
При подстройке частоты генератора тактовых импульсов (9) применяется специальный пошаговый алгоритм поразрядного уравновешивания, обеспечивающий ускоренную подстройку частоты ГТИ (9) под эталонное значение. На каждом шаге этого алгоритма определяется знак отклонения частоты ГТИ (9) от идеального значения (16384000 Гц) и значение двоичного кода, подаваемого на цифровые входы управляющего цифроаналогового преобразователя (17), выходной сигнал которого используется в качестве источника напряжения, регулирующего в небольших пределах частоту ГТИ (9). Количество шагов подстройки (n) определяется разрядностью цифроаналогового преобразователя (17), используемого в схеме блока формирования напряжения подстройки частоты (10), которая в свою очередь зависит от требуемой абсолютной точности подстройки (Δf) и диапазона перестройки частоты используемого генератора (ΔF) и вычисляется по формуле:
n=Ceil[log2(ΔF/Δf)].
Так, для ΔF=16 Гц, Δf=0,0262 Гц получается n=10.
После обнаружения приемником спутниковой навигационной системы одного или более спутников и получения точного времени микро-ЭВМ (6) начинает пошаговое выполнение алгоритма подстройки частоты генератора тактовых импульсов (9), заключающееся в определении значений двоичного кода, подаваемого на вход управляющего цифроаналогового преобразователя (17).
Вначале через устройство ввода-вывода (14) микро-ЭВМ (6) формирует и передает импульс начальной установки, поступающий на входы R синхронного D-триггера (18) и двоичного счетчика импульсов (16), который обеспечивает сброс их в нулевое состояние. Далее микро-ЭВМ (6) приступает к выполнению первого шага алгоритма подстройки частоты ГТИ (9), при этом она переходит в режим обнаружения отрицательного перепада (с уровня логической единицы на уровень логического нуля) импульса СХ, контролируя его через устройство ввода-вывода (14). После обнаружения такого перепада микро-ЭВМ (6) вырабатывает на линии DTGPS сигнал уровнем логической 1, подаваемый на вход D синхронного триггера (18) и подготавливающий переключение его в состояние логической 1 по выходу. Далее на линии EGPS микро-ЭВМ (6) формирует сигнал EGPS уровнем логической 1, поступающий на вход логического элемента И (20), на другой вход которого подаются импульсы СХ от приемника спутниковой навигационной системы. Таким образом обеспечивается разрешение прохождения импульсов СХ на вход С синхронного D-триггера (18) и по положительному фронту следующего импульса СХ синхронный D-триггер (18) переводится в состояние логической единицы по выходу, обеспечивая подачу на вход двоичного счетчика (16) через логический элемент И (19) импульсов с выхода ГТИ (9). С этого момента микро-ЭВМ (6) переходит в режим подсчета числа поступивших импульсов СХ и через заданное время, определяемое количеством подсчитанных импульсов СХ, а именно на последней секунде отсчитываемого временного интервала, на линии EGPS микро-ЭВМ (6) формирует сигнал уровнем логического нуля. Далее при поступлении положительного фронта очередного импульса СХ синхронный D-триггер (18) переводится в состояние логического нуля по выходу, обеспечивая тем самым запрет прохождения на счетный вход двоичного счетчика импульсов от генератора тактовых импульсов. Таким образом, двоичный счетчик (16) обеспечивает подсчет импульсов генератора тактовых импульсов, поступающих на его вход в течение заданного эталонного интервала времени. Длительность эталонного интервала времени, необходимого для точной подстройки частоты генератора тактовых импульсов (9) на каждом шаге алгоритма, определяется минимально необходимой точностью настройки частоты генератора тактовых импульсов (Δf) и определяется исходя из неравенства ТЭ≥1/Δf. Так, для установки частоты генератора тактовых импульсов с точностью Δf=0,0262 Гц требуется интервал времени ТЭ≥39 сек. Разрядность двоичного счетчика, обеспечивающего подсчет импульсов генератора тактовых импульсов, должна быть не меньше разрядности используемого для формирования управляющего напряжения цифроаналогового преобразователя (17), причем старший разряд этого счетчика определяет знак отклонения частоты генератора тактовых импульсов от эталона на каждом шаге подстройки. По знаку отклонения частоты ГТИ (9) от эталона определяется значение двоичного кода, подаваемого на вход управляющего цифроаналогового преобразователя (17) на каждом шаге подстройки. Значение двоичного кода вычисляется согласно выражениям:
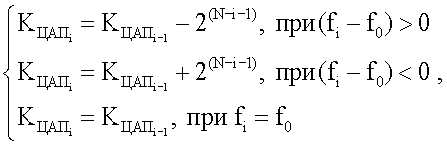
где 
 - значения кода, подаваемого на вход управляющего цифроаналогового преобразователя (ЦАП) на шаге с номером i и (i-1) соответственно, при этом
- значения кода, подаваемого на вход управляющего цифроаналогового преобразователя (ЦАП) на шаге с номером i и (i-1) соответственно, при этом  ;
;
N - число разрядов управляющего ЦАП;
i - текущий шаг подстройки частоты ГТИ (i изменяется в интервале от 1 до N-1);
fi - частота ГТИ на текущем шаге подстройки;
f0 - эталонное значение частоты ГТИ.
При строгом совпадении частоты генератора тактовых импульсов (9) с эталонным значением все разряды счетчика импульсов (16) установятся в нулевое состояние. Если такая ситуация возникает на i-том шаге подстройки, то дальнейшие шаги не выполняются и на входе ЦАП (17) остается значение двоичного кода, установленного на предшествующем шаге подстройки.
Суммарное максимально возможное время (Т∑), необходимое для подстройки частоты ГТИ (9), определяется формулой:
Т∑=ТЭ·n+Tп(N-1)=39·10+1·9=399 сек,
где Тп=1 сек - длительность пауз между шагами при подстройке частоты ГТИ (9), необходимых для выполнения алгоритма подстройки.
После выполнения подстройки частоты ГТИ (9) под эталонное значение аппаратура приемной измерительной станции под управлением программы, хранящейся в памяти микро-ЭВМ (6), как и в случае прототипа, продолжает выполнять процедуру настройки и подготовки цифровой измерительной станции к измерениям, выполнение которой обеспечивает тестирование всех блоков и узлов ЦИС. В частности, проводится тестирование блока датчиков электромагнитного поля (3) и блока измерительных усилителей (2). При этом на контрольные входы блока датчиков электромагнитного поля (3) подаются градуировочные сигналы, формируемые под управлением микро-ЭВМ (6) генератором тестовых сигналов (4), и производится синхронная регистрация откликов измерительных каналов на подачу градуировочных сигналов с последующей их обработкой. Результаты тестирования сохраняются в памяти микро-ЭВМ (6) и передаются по радиоканалам связи в центр управления и сбора информации в конце измерительного сеанса вместе с данными регистрации и обработки сигналов датчиков электромагнитного поля.
После тестирования блоков и узлов ЦИС станция в отличие от прототипа переходит в режим ожидания времени начала регистрации, контролируемого по данным, поступающим от GPS приемника (8). При этом контролируется абсолютное время, соответствующее началу текущего периода импульсной последовательности СХ (положительный фронт импульсов СХ). Когда время начала текущего периода импульсов СХ совпадет с временем пуска процесса измерения за вычетом длительности одного периода СХ (1 сек) микро-ЭВМ (6) по положительному фронту следующего импульса, СХ обеспечивает запуск режима измерения сигналов, поступающих от блока датчиков 3. Сигналы, усиленные в блоке измерительных усилителей (2), поступают на входы аналого-цифрового преобразователя (5), где преобразуются в цифровую форму и далее, поступая в микро-ЭВМ (6), обрабатываются по алгоритму весового синхронного накопления в реальном масштабе времени. Результаты обработки накапливаются в оперативной памяти микро-ЭВМ и по окончании измерительного сеанса по запросу от ЦУСИ передаются в ЦУСИ совместно с результатами тестирования.
На основании вышеизложенного можно сделать вывод.
При сохранении всех преимуществ прототипа новая система активного электромагнитного мониторинга сейсмоактивных зон земной коры позволяет ценой незначительных изменений (дополнений) в структуре и схеме приемных цифровых измерительных станций получить преимущества, позволяющие значительно повысить точность измерения сигналов электромагнитного поля. Тем самым обеспечивается измерение более слабых вариаций электрических параметров земной коры, в частности кажущегося электрического сопротивления горных пород, слагающих земную кору. С точки зрения прогноза катастрофических событий (землетрясений), повышение точности измерения вариаций электрического сопротивления горных пород позволяет контролировать более ранние стадии развития процессов подготовки землетрясений, происходящих в земной коре.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ экологического мониторинга и охраны районов нефтегазодобычи | 2016 |
|
RU2623837C1 |
| СИСТЕМА КОНТРОЛЯ ПРЕДВЕСТНИКОВ ЛОКАЛЬНЫХ ПОВЕРХНОСТНЫХ ЗЕМЛЕТРЯСЕНИЙ | 2011 |
|
RU2469358C1 |
| ГЕОФИЗИЧЕСКАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ | 1994 |
|
RU2091820C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2337388C1 |
| АВТОНОМНЫЙ ГИДРОАКУСТИЧЕСКИЙ АНТЕННЫЙ МОДУЛЬ | 2009 |
|
RU2427005C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ С ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2296424C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2353949C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2004 |
|
RU2289149C2 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2006 |
|
RU2310221C1 |
Изобретение относится к области геофизической разведки и предназначено для организации электромагнитного мониторинга сейсмоактивных зон земной коры методами активной электроразведки. Сущность: система содержит центр управления, сбора и обработки информации. Указанный центр соединен с помощью радиолиний связи по разветвлено-лучевой схеме с генераторной установкой и сетью измерительных пунктов. Каждый измерительный пункт включает блок датчиков электромагнитного поля, подключаемый к цифровой измерительной станции, и устройство передачи данных, выполненное в виде радиомодема. Устройство передачи данных соединено двунаправленными линиями связи с цифровой измерительной станцией. Измерительная станция состоит из генератора тестовых сигналов и аналого-цифрового преобразователя (АЦП), подключенного к блоку измерительных усилителей и микро-ЭВМ. Генератор тестовых сигналов выполнен с возможностью формирования градуировочных сигналов под управлением микро-ЭВМ и подключен своими выходами к блоку датчиков электромагнитного поля. В состав аппаратуры приемных цифровых измерительных станций и генераторной установки введены приемник спутниковой навигационной системы, прецизионный термостабилизированный управляемый напряжением кварцевый генератор тактовых импульсов, блок формирования управляющего напряжения для точной подстройки частоты генератора тактовых импульсов. Приемник спутниковой навигационной системы соединен с микро-ЭВМ двунаправленными линиями связи последовательного интерфейса. Генератор тактовых импульсов подключен своим выходом к входу синхронизации АЦП, а в случае генераторной установки - к входу системы управления и диагностики. Блок формирования управляющего напряжения соединен с микро-ЭВМ через внутрисистемную общую шину обмена. На первый вход указанного блока подаются сигналы синхронизации, вырабатываемые приемником спутниковой навигационной системы, на другой вход (вход обратной связи) поступают импульсы высокой частоты с выхода генератора тактовых импульсов. Вход генератора тактовых импульсов в свою очередь подключен к выходу блока формирования управляющего напряжения. Технический результат: повышение точности измерения. 2 ил.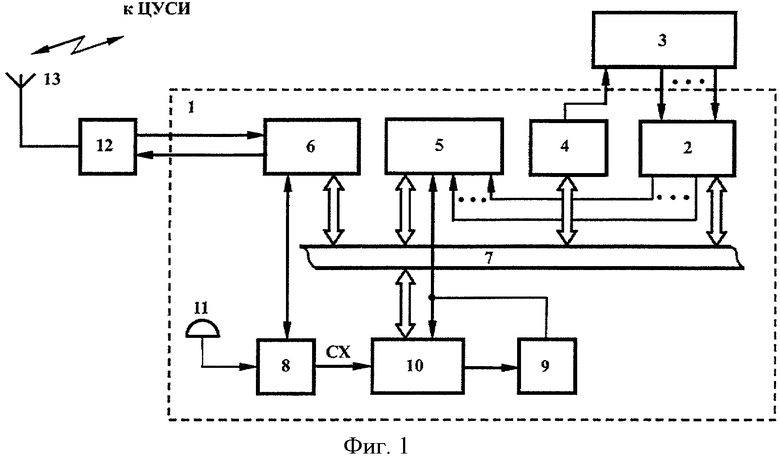
Система активного электромагнитного мониторинга сейсмоактивных зон земной коры, содержащая центр управления, сбора и обработки информации, соединенный с помощью радиолиний связи по разветвленно-лучевой схеме с генераторной установкой и сетью измерительных пунктов, причем каждый измерительный пункт включает блок датчиков электромагнитного поля, подключаемый к цифровой измерительной станции, и устройство передачи данных, выполненное в виде радиомодема, также соединенное двунаправленными линиями связи с цифровой измерительной станцией, в свою очередь, состоящей из генератора тестовых сигналов, выполненного с возможностью формирования градуировочных сигналов под управлением микроЭВМ и подключенного своими выходами к блоку датчиков электромагнитного поля, аналого-цифрового преобразователя, подключенного к блоку измерительных усилителей и микроЭВМ, отличающаяся тем, что в состав аппаратуры приемных цифровых измерительных станций и генераторной установки введены приемник спутниковой навигационной системы, соединенный с микроЭВМ двунаправленными линиями связи последовательного интерфейса, прецизионный термостабилизированный управляемый напряжением кварцевый генератор тактовых импульсов, подключенный своим выходом к входу синхронизации аналого-цифрового преобразователя, а в случае генераторной установки - к входу системы управления и диагностики, и блок формирования управляющего напряжения для точной подстройки частоты генератора тактовых импульсов, соединенный с микроЭВМ через внутрисистемную общую шину обмена, на первый вход которого подаются сигналы синхронизации, вырабатываемые приемником спутниковой навигационной системы, а на другой вход (вход обратной связи) поступают импульсы высокой частоты с выхода термостабилизированного кварцевого генератора тактовых импульсов, вход которого, в свою очередь, подключен к выходу блока формирования управляющего напряжения для точной подстройки частоты генератора тактовых импульсов.
| ГЕОФИЗИЧЕСКАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ | 1994 |
|
RU2091820C1 |
| ПРИДОННОЕ ЭЛЕКТРОМАГНИТНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ВЫПОЛНЕНИЯ ПРИДОННЫХ ЭЛЕКТРОМАГНИТНЫХ ИЗМЕРЕНИЙ | 2003 |
|
RU2324206C2 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 2005 |
|
RU2298210C1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1998 |
|
RU2158940C2 |

