Изобретение относится к устройству управления для ветровой движительной системы, при этом устройство управления содержит первичное фиксирующее средство крепления для фиксирования первого конца тягового троса, второй конец которого прикрепляется к устройству или транспортному средству, которому будет передаваться тяговое усилие, вторичное фиксирующее средство для прикрепления первого конца заданного количества тяговых тросов, второй конец которых закрепляется на аэродинамическом элементе в виде крыла. Механическая поддерживающая рама соединяет первичное фиксирующее средство с вторичным фиксирующим средством, чтобы передавать тяговое усилие. Дополнительным объектом изобретения является аэродинамическая ветровая движительная система, содержащая такое устройство управления. Кроме того, изобретение относится к способу управления такой аэродинамической ветровой движительной системой.
Ветровая движительная система согласно изобретению в основном содержит аэродинамический элемент в виде крыла, который присоединяется к устройству управления в непосредственной близости от элемента в виде крыла через заданное количество тяговых тросов. Само устройство управления присоединяется через единственный тяговый трос к транспортному средству или преобразователю энергии, которому будет передаваться тяговое усилие, генерируемое аэродинамическим элементом в виде крыла.
Примеры таких ветровых движительных систем раскрыты в WO 2005/100150 и WO 2005/100147.
Для того чтобы расширить область применения и эффективность таких ветровых движительных систем, главным образом желательно увеличить размер аэродинамического элемента в виде крыла. Когда целью является обеспечить эффективную ветровую движительную систему, которая, например, может использоваться для буксировки грузовых судов, то необходимо, чтобы аэродинамический элемент в виде крыла, такой как уголковый отражатель, имел площадь от 160 до 5000 м2. Главная проблема, связанная с таким большим размером элементов в виде крыла, состоит в управлении их полетом. Больше того, поскольку было бы желательно, чтобы элемент в виде крыла летал на большой высоте, чтобы использовать большую скорость ветра, которая там существует, то соединение элемента в виде крыла с точкой наземного крепления через более чем один тяговый трос является неэффективным, т.к. это будет увеличивать вес средств для крепления. Таким образом, необходимо соединять элемент в виде крыла через определенное количество тяговых тросов, идущих к гондоле, которая располагается близко к элементу в виде крыла, тогда как сама гондола присоединяется к базовой точке крепления на земле или судне через один единственный тяговый трос.
Когда выбирается такая компоновка ветровой движительной системы, то первой проблемой является способ управления направлением и скоростью элемента в виде крыла, соединенного с гондолой. Задачей изобретения является обеспечение устройства управления для такой гондолы, которое способно улучшить управляемость системы.
Дополнительной проблемой, связанной с такой компоновкой, является вес гондолы. Главным образом, желательно минимизировать вес, т.к. (i) вес гондолы должен переноситься элементом в виде крыла, таким образом уменьшая тяговое усилие, передаваемое на базовую точку крепления, и (ii) большая сила инерции массы негативно сказывается на маневренности элемента в виде крыла. Однако силы, которые должны быть переданы гондолой, довольно хорошо выдерживают уменьшение размеров поддерживающих структур внутри гондолы. Задачей изобретения является обеспечение управляющего устройства для такой гондолы, которая имеет вес, оптимизированный по отношению к ее способности передачи тягового усилия.
Более того, обычно необходимо управлять параметрами полета элемента в виде крыла с базового модуля управления, который располагается в непосредственной близости к базовой точке крепления. Обычно это требует передачи сигналов управления с базового модуля управления к устройству управления в гондоле, чтобы управлять исполнительным механизмом устройства управления. Главной проблемой, связанной с такой структурой, является риск того, что элемент в виде крыла может стать неуправляемым, если передача сигналов управления прерывается. Дополнительной задачей изобретения является обеспечение такой ветровой движительной системы, которая способна уменьшить или даже устранить этот риск.
Согласно первому аспекту изобретения создано такое устройство управления, как упоминалось выше, в котором вторичное фиксирующее средство содержит, по меньшей мере, одну фиксированную точку крепления, левую подвижную точку крепления, правую подвижную точку крепления и исполнительный механизм устройства управления для изменения расстояния между верхней фиксированной точкой крепления и левой подвижной точкой крепления, а также для изменения расстояния между верхней фиксированной точкой крепления и правой подвижной точкой крепления.
Устройство управления согласно изобретению обеспечивает сложную структуру для управления аэродинамическим элементом в виде крыла, прикрепленным к нему. Базовая концепция устройства управления основывается на обеспечении фиксированной правой подвижной и левой подвижной точки крепления для крепления к тяговым тросам, прикрепленным к аэродинамическому элементу в виде крыла. Согласно изобретению верхняя фиксированная точка крепления или множество таких верхних фиксированных точек крепления соединены с тяговыми тросами, которые прикрепляются к центральной части аэродинамического элемента в виде крыла. Левая подвижная точка крепления располагается таким образом, чтобы прикрепляться к тем тяговым тросам, которые прикрепляются к левосторонней части аэродинамического элемента в виде крыла, а правая подвижная точка крепления располагается, соответственно, таким образом, чтобы прикрепляться к тем тяговым тросам, которые прикрепляются к правосторонней части аэродинамического элемента в виде крыла.
Таким образом, за счет уменьшения расстояния между одной из подвижных точек крепления и верхней фиксированной точкой крепления и выборочного дополнительного увеличения расстояния между другой подвижной точкой крепления и верхней фиксированной точкой крепления геометрическая форма аэродинамического элемента в виде крыла может быть изменена для того, чтобы изменить направление полета элемента в виде крыла. В частности, геометрическая форма аэродинамического элемента в виде крыла может быть изменена, при этом элемент перейдет от симметричной формы, когда две подвижные точки крепления расположены на одинаковом расстоянии от верхней фиксированной точки крепления, к несимметричной форме, когда аэродинамический элемент в виде крыла изгибается на одной стороне по направлению к устройству управления и выборочно дополнительно изгибается на другой стороне в направлении от устройства управления.
Предпочтительно, чтобы аэродинамический элемент в виде крыла имел форму поперечного сечения, которая изогнута с помощью способа, известного при существующем уровне техники, относящегося к аэростатам в виде уголкового отражателя, при этом кривизна изгибания изменяется посредством перемещения подвижных точек крепления.
Согласно изобретению подвижные точки крепления могут быть расположены с наружной стороны рамы механической поддержки устройства управления. Однако точка приложения нагрузки для передачи тяговых сил от тяговых тросов, прикрепленных к подвижным точкам крепления, предпочтительно располагается внутри поддерживающей рамы.
Согласно первому предпочтительному варианту выполнения изобретения средства исполнительной части устройства управления содержат исполнительный механизм для выборочного приведения в действие ремня в альтернативных направлениях, при этом первый конец ремня обеспечивает использование левой подвижной точки крепления, а второй конец ремня обеспечивает использование правой подвижной точки крепления. При использовании этого предпочтительного варианта выполнения изобретения достигается одновременное перемещение левой и правой подвижных точек крепления, когда ремень приводится в действие в одном направлении. Если более подробно, то расстояние между верхней фиксированной точкой крепления и одной из подвижных точек крепления увеличивается, тогда как расстояние до другой подвижной точки крепления уменьшается.
Этот вариант изобретения может быть дополнительно улучшен, если средства исполнительной части устройства управления содержат приводное колесо, прикрепленное к раме механической поддержки с возможностью вращения, и ремень, который, по меньшей мере частично, наматывается на это колесо, при этом первый конец ремня обеспечивает использование левой подвижной точки крепления, а второй конец ремня обеспечивает использование правой подвижной точки крепления. Согласно этому предпочтительному варианту выполнения изобретения приводное колесо служит в качестве точки приложения для сил тяги, действующих на подвижные точки крепления, и эти силы тяги передаются через подшипники вращения приводного колеса на раму механической поддержки. Колесо может иметь привод с электрическим двигателем, при этом вращение от двигателя на колесо, предпочтительно, передается через понижающую зубчатую передачу, таким образом увеличивая крутящий момент, действующий на колесо. Понижающая зубчатая передача может быть выбрана из следующих вариантов: планетарная передача, волновая зубчатая передача, редукторы Sumitomo, редукторы Spinea.
Другие решения для приведения в действие приводного колеса также могут быть реализованы, например рычаг, присоединенный к колесу и приводимый в действие с помощью эксцентрика, соединенного с линейным приводным механизмом.
В частности, предпочтительно, чтобы это приводное колесо было выполнено в виде зубчатого колеса, и ремень, который тоже является зубчатым, входил в зацепление с колесом. Это гарантирует безопасную передачу вращательного движения колеса в перемещение подвижных точек крепления.
Согласно альтернативному решению средства исполнительной части устройства управления содержат первый исполнительный механизм, прикрепленный к поддерживающей раме и адаптированный для изменения расстояния между верхней фиксированной точкой крепления и левой подвижной точкой крепления, и второй исполнительный механизм, прикрепленный к поддерживающей раме и адаптированный для изменения расстояния между верхней фиксированной точкой крепления и правой подвижной точкой крепления. Первый и второй исполнительные механизмы могут быть пневматическим или гидравлическим цилиндром, первый конец которого прикреплен к поддерживающей раме, а второй его конец обеспечивает работу левой и соответственно правой подвижной точки крепления.
Согласно другому предпочтительному варианту выполнения изобретения поддерживающая рама содержит, по меньшей мере одну, предпочтительно две (или больше) поддерживающие пластины.
Более того, поддерживающая рама может, предпочтительно, содержать две (или более) поддерживающие пластины, расположенные на некотором расстоянии одна от другой и вставляемые, по меньшей мере, между одной верхней фиксированной точкой крепления и первичными фиксирующими средствами. С помощью этого варианта выполнения изобретения реализована такая структура поддерживающей рамы, которая позволяет использовать легковесную конструкцию и безопасную передачу сил тяги, действующих на поддерживающую раму. Поддерживающие пластины могут быть выполнены из подходящих материалов, таких как легкие металлические сплавы, армированные волокнами полимеры или подобные материалы. В частности, две поддерживающие пластины могут проходить от первичных фиксирующих средств к верхней фиксированной точке (точкам) крепления.
Согласно другому предпочтительному варианту выполнения изобретения точки приложения нагрузки к первичному фиксирующему средству и вторичному фиксирующему средству соединены напряженным жгутом из волокон для передачи сил тяги. Этот предпочтительный вариант выполнения изобретения основывается на заключении, что главные силы, действующие между первичным и вторичным фиксирующими средствами, являются тяговыми силами, и, таким образом, легковесная структура устройства управления может, предпочтительно, быть реализована посредством соединения этих средств крепления со структурой, которая частично адаптирована для передачи таких сил тяги. Согласно предпочтительному варианту выполнения изобретения жгут из волокон используется для передачи сил тяги. Волокна для жгута могут быть выбраны из следующих типов волокон: стекловолокно, углеволокно и другие волокна, хорошо подходящие для намеченной цели. Согласно варианту выполнения изобретения, чтобы сформировать жгут из волокон, используется определенное количество волокон. Волокна могут быть расположены в жгуте параллельно и могут иметь такой вид, когда они соединены друг с другом, например, с помощью матричного связующего материала или механического взаимодействия, подобного скручиванию, переплетению или сплетению волокон.
Более того, предпочтительно, чтобы поддерживающая рама содержала, по меньшей мере, две поддерживающие пластины, расположенные на некотором расстоянии одна от другой, при этом первичные фиксирующие средства и верхняя фиксированная точка крепления являются жесткими стержнями, проходящими из одной поддерживающей пластины к другой пластине, и соединяются с помощью напряженного жгута из волокон для передачи сил тяги. Этот вариант изобретения особенно предпочтителен, поскольку обеспечивает использование легковесной структуры устройства управления без потери существенных механических свойств устройства. Согласно этому варианту изобретения напряженный жгут из волокон может быть интегрирован в поддерживающие пластины или может быть расположен на некотором расстоянии от поддерживающих пластин. Стержни, предпочтительно, структурно закрепляются внутри поддерживающих пластин, тогда как силы тяги между стержнями передаются, главным образом, через жгуты из волокон, таким образом позволяя избежать тяжелых нагрузок, действующих на поддерживающие пластины в случае отдельного расположения жгутов из волокон, выходящих из этих пластин.
В частности, предпочтительно, чтобы напряженные жгуты из волокон содержали первый набор жгутов из волокон, смежный с первым набором поддерживающих пластин, и второй набор жгутов из волокон, смежный с другим набором поддерживающих пластин. С помощью такой конфигурации стержни закрепляются близко к их концам, зафиксированным внутри поддерживающих пластин с помощью набора жгутов из волокон, таким образом реализуется конструкция в виде сандвича, в которой средняя часть стержней может служить как точка крепления, а конечные части стержней ограничиваются жгутами из волокон, предназначенных для передачи сил тяги и закрепленных внутри поддерживающих пластин, для определения геометрического расположения в пространстве.
В заключение можно добавить, что фиксация точек крепления и средств крепления может быть дополнительно улучшена тем, что сформированы левая и правая верхние фиксированные точки крепления, и эти верхние фиксированные точки крепления и первичные фиксирующие средства являются цилиндрическими стержнями, проходящими из первой поддерживающей пластины ко второй поддерживающей пластине, расположенной параллельно первой пластине, при этом цилиндрические стержни соединены посредством жгутов из волокон, которые, по меньшей мере частично, намотаны вокруг стержней и которые содержат первый жгут из волокон, проходящий из стержня для левой второй фиксированной точки крепления к стержню для первичных фиксирующих средств, второй жгут из волокон, проходящий из стержня для правой второй фиксированной точки крепления к стержню для первичных фиксирующих средств, третий жгут из волокон, проходящий из точки приложения нагрузки для точек подвижного крепления к стержню для первичных фиксирующих средств и для передачи сил тяги. Эта структура устройства управления обеспечивает суммирование пяти точек крепления, при этом две точки крепления для тяговых тросов являются подвижными и расположены по сторонам устройства управления, а две точки крепления для тяговых тросов являются фиксированными и расположены в центральной части относительно подвижных точек крепления. Подвижная точка крепления передает силу тяги, по меньшей мере, одной точке приложения нагрузки, которая прикреплена к поддерживающим пластинам. Кроме того, сумма, по меньшей мере, четырех точек крепления обеспечивается внутри устройства управления и силы тяги от двух фиксированных точек крепления и точки приложения нагрузки передаются к первичным фиксирующим средствам. Согласно данному варианту изобретения эта передача сил тяги достигается через отдельные жгуты из волокон, проходящих от каждой точки крепления или точки приложения нагрузки соответственно к первичным фиксирующим средствам. Важно отметить, что три жгута из волокон могут быть обеспечены одним единственным жгутом, который наматывается вокруг стержней, чтобы сформировать единственный жгут из волокон, проходящий между единичными стержнями и средствами крепления. Дополнительный жгут из волокон может быть обеспечен между единичными стержнями, чтобы увеличить жесткость всей структуры.
Согласно другому предпочтительному варианту выполнения изобретения, по меньшей мере, одна из подвижных точек крепления и/или первичные фиксирующие средства соединены с поддерживающей рамой через датчик для измерения нагрузки. Этот вариант выполнения изобретения позволяет определять силы тяги, действующие через соответствующие тяговые тросы на подвижных точках крепления, и/или силы тяги, действующие через первичные фиксирующие средства на тяговом тросе. Это позволяет иметь особое преимущество, которое дает возможность для определения этих сил близко к устройству управления, т.е. это позволяет рассчитать определенные условия полета аэродинамического элемента в виде крыла, и, таким образом, это имеет высокую значимость для управления полетом. Другое преимущество этого предпочтительного варианта выполнения изобретения заключается в распределении сигналов датчиков внутри устройства управления. Кроме того, нет необходимости передавать такие сигналы датчиков или соответственно рассчитанные значения к устройству управления через сигнальную шину или с помощью других средств передачи, таким образом позволяя избежать риск прерывания передачи данных.
Устройство управления, как было описано ранее или во вступительной части, может быть дополнительно улучшено за счет обеспечения дополнительных подвижных средств крепления для управления подъемной силой аэродинамического элемента в виде крыла, при этом средства должны быть соединены, по меньшей мере, с одним тяговым тросом, прикрепленным к аэродинамическому элементу в виде крыла в зоне между передней кромкой крыла и задней кромкой крыла. Такие дополнительные подвижные средства крепления могут быть расположены около правых и левых подвижных средств крепления и служить для управления подъемной силой элемента в виде крыла во время полета. Поскольку уменьшенная подъемная сила будет обычно появляться в результате увеличения угла атаки элемента в виде крыла, например, при подъеме передней кромки крыла относительно задней кромки крыла, такие тросы для управления подъемной силой могут быть также использованы и для управления углом наклона.
Дополнительные средства подвижного крепления для управления подъемной силой аэродинамического элемента в виде крыла могут, предпочтительно, содержать левые средства подвижного крепления и правые средства подвижного крепления, которые должны быть соединены, по меньшей мере, с одним тяговым тросом, прикрепленным к левой зоне аэродинамического элемента в виде крыла и, соответственно, к правой его зоне на участке между передней кромкой крыла и задней кромкой крыла. Это позволяет производить индивидуальное управление подъемной силой в левой и правой частях элемента в виде крыла и, таким образом, может быть использовано для улучшения маневренности и/или для закручивания элемента в виде крыла, как последствия изменения индивидуального угла атаки.
Предпочтительным является то, что устройство управления содержит накопитель энергии, датчик для определения ориентации и/или степени поворота устройства управления, положения устройства управления и/или, по меньшей мере, одного полетного параметра устройства управления, и контроллер для управления направлением полета аэродинамического элемента в виде крыла, прикрепленный к устройству управления, при этом контроллер соединен с датчиками и накопителем энергии и выполнен с возможностью управления исполнительным механизмом для изменения направления полета аэродинамического элемента в виде крыла, базирующегося на сигналах датчиков. С помощью такого оборудованного устройства управления можно обеспечить улучшенное управление аэродинамического элемента в виде крыла, при этом, по меньшей мере, часть этапа обработки данных, необходимая для расчета сигналов контроллера, передающихся исполнительному механизму, выполняется внутри устройства управления, таким образом позволяя избежать необходимости передачи большого количества сигналов на главный контроллер системы управления, расположенный на наземной станции, и наоборот.
Этот предпочтительный вариант выполнения изобретения может быть дополнительно улучшен в связи с тем, что контроллер выполнен с возможностью управления исполнительным механизмом для изменения направления полета аэродинамического элемента в виде крыла без внешнего ввода из устройства управления. В частности, при управлении элементами в виде крыла с большими размерами, при этом использующих устройство управления согласно изобретению, важно гарантировать, что даже в случае неисправности, когда передача сигналов от наземной станции управления к устройству управления прерывается или в ней возникают неполадки, некоторые базовые функции управления могут быть поддержаны устройством управления без внешнего ввода, например из наземной станции управления. Таким образом, идея этого усовершенствования заключается в том, чтобы обеспечить определенную долю автономности устройства управления, для того чтобы позволить самостоятельное управление аэродинамическим элементом в виде крыла с помощью устройства управления, по меньшей мере, на определенный период времени в случае возникновения неисправности при передаче энергии и/или при передаче сигнала между наземной станцией и устройством управления. Контроллер устройства управления может таким образом переключиться в режим аварийного отказа, что позволяет, по меньшей мере, избежать того, что аэродинамический элемент в виде крыла становится неуправляемым.
Дополнительные преимущества обеспечиваются за счет того, что накопитель энергии содержит электрическую, предпочтительно заряжаемую батарею, конденсатор и/или воздушный аккумулятор. Эти накопители энергии особенно хорошо подходят для хранения энергии при использовании легковесных компонентов и для снабжения энергией в той форме, которая требуется для привода исполнительного механизма.
Таким образом, дополнительные преимущества достигаются тем, что контроллер содержит логический модуль, запрограммированный так, чтобы управлять исполнительным механизмом, который обеспечивает, что аэродинамический элемент в виде крыла всегда остается выше минимальной высоты. Это будет позволять безопасно поддерживать определенную высоту аэродинамического элемента в виде крыла и может даже сделать возможным управлять аэродинамическим элементом в виде крыла таким способом, который позволяет достигнуть такой же или немного уменьшенной оперативности управления, таким образом дополнительно обеспечивая значительную силу тяги в тяговом тросе, чтобы обеспечить значительную передачу энергии к наземной станции.
Логический модуль может быть, предпочтительно, запрограммирован таким образом, чтобы сохранять аэродинамический элемент в виде крыла на фиксированной высоте или в пределах фиксированного диапазона высоты для направления аэродинамического элемента в виде крыла по заданной замкнутой траектории полета и/или для сохранения аэродинамического элемента в виде крыла на горизонтальной прямолинейной траектории. Логический модуль может быть запрограммирован только согласно одной из этих альтернатив, при этом две или все из этих альтернатив могут быть запрограммированы для того, чтобы в зависимости от условий полета могла быть выбрана соответствующая аварийная программа, которая соответствует ситуации в настоящий момент. В частности, когда устройство управления используется для управления аэродинамической ветровой движительной системой, которая используется для буксировки судна, то полет по прямой траектории может быть предпочтительным, для того чтобы позволить выполнение длительной работы и создание тягового усилия ветровой движительной системой. В этом случае траектория прямого полета будет, предпочтительно, соответствовать курсу судна перед тем, как возникнет аварийная ситуация, и позиция аэродинамического элемента в виде крыла регулируется для получения минимальной силы в буксировочном тросе, и минимальному усилию управления: эта позиция обычно будет позицией в зените.
Кроме того, предпочтительно, чтобы контроллер был соединен, по меньшей мере, с одним датчиком, определяющим угловое положение устройства управления относительно направления гравитации и запрограммирован таким образом, чтобы поддерживать фиксированную угловую ориентацию, или диапазон угловой ориентации, или запрограммированную последовательность угловых ориентаций, по меньшей мере, в одной плоскости, предпочтительно, в большем количестве плоскостей, и, в частности, ориентации в трех плоскостях, перпендикулярных друг другу и расположенных относительно направления гравитации. Этот предпочтительный вариант выполнения изобретения использует типичное свойство аэродинамических элементов в виде крыла, подобных уголковому отражателю, а именно то, что в случае направления ветра, расположенного в перпендикулярной плоскости относительно гравитации (т.е. горизонтальной), направление полета и направление силы тяги, вызываемой элементом в виде крыла, может управляться с помощью сохранения элемента в виде крыла в определенной угловой ориентации относительно направления гравитации. Это может быть достигнуто за счет настройки соответствующей угловой ориентации устройства управления в соответствии с направлением гравитации. Таким образом, контроллер может быть, предпочтительно, запрограммирован таким образом, чтобы поддерживать угловую позицию или диапазон угловых позиций в соответствии с направлением гравитации. Это будет, обычно, приводить к более или менее фиксированной позиции устройства управления и, соответственно, элемента в виде крыла относительно наземной станции. В усовершенствованной версии этого контроллера запрограммированная последовательность угловых ориентаций последовательно регулируется. Это позволяет направлять аэродинамический элемент в виде крыла в определенную предпочтительную позицию и может дополнительно использоваться для направления аэродинамического элемента в виде крыла по замкнутой траектории полета, например, подобной окружности, эллипсоиду или траектории полета в форме лежащей восьмерки. Управление такой последовательностью ориентации будет зачастую обеспечивать безопасное управление полетом элемента в виде крыла, поскольку такое управление менее чувствительно к кратковременным изменениям скорости и направления ветра.
Кроме того, предпочтительно, чтобы контроллер соединялся с тремя датчиками, работающими на основе гироскопа, которые расположены в трех направлениях, перпендикулярных друг другу, и тремя линейными датчиками ускорения, расположенными в трех направлениях, перпендикулярных друг другу, при этом контроллер программируется таким образом, чтобы производить приблизительный расчет направления гравитации с помощью сигналов от этих датчиков. Этот вариант выполнения изобретения позволяет производить достаточно точное определение направления гравитации, даже в тех устройствах управления, которые подвергаются воздействию постоянно изменяющихся ускорений.
Согласно другому аспекту изобретения устройство управления, как описано выше, или устройство управления, как описано во вводной части описания, может быть дополнительно улучшено тем, что контроллер соединен с датчиком нагрузки, который помещается между поддерживающей рамой и первичными фиксирующими средствами для измерения силы тяги аэродинамического элемента в виде крыла, при этом датчик нагрузки соединен с поддерживающей рамой и левыми подвижными точками крепления, располагаясь между ними, и используется для измерения левого поворотного усилия, еще один датчик нагрузки соединен с поддерживающей рамой и правыми подвижными точками крепления, располагаясь между ними, и используется для измерения правого поворотного усилия, кроме того, используется система позиционирования GPS и/или анемометр.
Этот предпочтительный вариант выполнения изобретения обеспечивает, по меньшей мере один, и, предпочтительно, пять важных входных параметров для управления полетом аэродинамического элемента в виде крыла изнутри устройства управления без необходимости передавать соответствующие сигналы от датчиков с внешней стороны устройства управления. Это позволяет улучшить самостоятельную работу устройства управления в случае временного прерывания передачи таких сигналов. В частности, предпочтительно, чтобы были предусмотрены, по меньшей мере, два датчика нагрузки и анемометр, чтобы гарантировать базовое управление аэродинамическим элементом в виде крыла.
Изобретение может быть дополнительно реализовано в аэродинамических ветровых движительных системах, содержащих аэродинамическое крыло, соединенное через заданное количество тяговых тросов, прикрепленных к крылу с помощью множества точек крепления, расположенных на некотором расстоянии одна от другой по ширине крыла и прикрепленных к устройству управления, как описано выше, при этом заданное количество самых левых тяговых тросов, т.е. расположенных левее других, объединяются и прикрепляются к левой подвижной точке крепления, заданное количество центральных левых тяговых тросов объединяются и прикрепляются к левой фиксированной точке крепления, заданное количество центральных правых тяговых тросов объединяются и прикрепляются к правой фиксированной точке крепления и заданное количество самых правых, т.е. расположенных правее других, тяговых тросов объединяются и прикрепляются к правой подвижной точке крепления.
Такая ветровая движительная система содержит устройство управления, которое интегрировано в систему и соединено с аэродинамическим элементом в виде крыла, чтобы предусматривать функции устройства управления, как описано выше.
Аэродинамическая ветровая движительная система может быть дополнительно улучшена за счет того, что устройство управления содержит дополнительные подвижные средства крепления, которые предназначены для управления подъемной силой аэродинамического элемента в виде крыла и которые прикрепляются, по меньшей мере, к одному, предпочтительно к заданному числу тяговых тросов для управления подъемной силой, прикрепленных к аэродинамическому элементу в виде крыла в зоне между передней кромкой крыла и задней кромкой крыла. Такие тяговые тросы для управления подъемной силой позволяют изменять аэродинамический профиль аэродинамического элемента в виде крыла. За счет этого аэродинамический профиль может быть изменен и преобразован в менее эффективный профиль, производящий меньшую подъемную силу, например, посредством натяжения тяговых тросов для управления подъемной силой, таким образом вызывая направленное вниз изгибание аэродинамического элемента в виде крыла в зоне их точек крепления. Такое уменьшение подъемной силы обычно приводит к увеличению угла атаки аэродинамического элемента в виде крыла, т.е. аэродинамический элемент в виде крыла будет располагаться ниже в области задней кромки и поднимется в зоне передней кромки. И наоборот, подъемная сила может быть снова увеличена посредством ослабления тяговых тросов для управления подъемной силой, таким образом восстанавливая оптимальный аэродинамический профиль для получения максимальной подъемной силы и восстановления высоты горизонтального полета элемента в виде крыла. Такое управление подъемной силой может быть использовано для уменьшения подъемной силы и, таким образом, увеличения способности к реагированию элемента в виде крыла на мешающее воздействие или изменения направления ветра и его скорости во время выполнения маневров при запуске или приземлении.
Предпочтительно, чтобы, по меньшей мере, один тяговый трос для управления подъемной силой был прикреплен к аэродинамическому элементу в виде крыла на расстоянии одной четверти от длины аэродинамического элемента в виде крыла за передней кромкой крыла. Зона, прилегающая к одной четверти в продольном направлении за передней кромкой крыла, зарекомендовала себя как самая эффективная для изменения подъемной силы, таким образом, тяговые тросы для управления подъемной силой, предпочтительно, прикрепляются в этой зоне.
Более того, заданное число тяговых тросов для управления подъемной силой прикрепляется к аэродинамическому элементу в виде крыла вдоль поперечного направления центральной зоны. Это усовершенствование обеспечивает рациональное уменьшение количества тяговых тросов для управления подъемной силой. Было доказано, что центральная зона аэродинамического элемента в виде крыла является самой эффективной для управления подъемной силой, при этом боковые зоны имеют меньшее влияние на нее. Таким образом, тяговые тросы для управления подъемной силой, прикрепленные к боковым зонам, могут быть пропущены для облегчения конструкции.
Более того, дополнительные подвижные средства крепления для управления подъемной силой аэродинамического элемента в виде крыла могут, предпочтительно, содержать левые подвижные средства крепления и правые подвижные средства крепления, которые присоединяются, по меньшей мере, к одному тяговому тросу, прикрепленному к левой зоне и, соответственно, одному тяговому тросу, прикрепленному к правой зоне аэродинамического элемента в виде крыла, в зоне между передней кромкой крыла и его задней кромкой. Это позволит управлять подъемной силой аэродинамического элемента в виде крыла раздельно в левой и правой зонах, и, таким образом, позволяет контролировать направление полета элемента в виде крыла и изгибать элемент в виде крыла вокруг его продольной оси.
Более того, изобретение может быть реализовано с помощью судна, соединенного через тяговый трос с первичными фиксирующими средствами устройства управления ветровой движительной системы, как описано выше. В этом отношении сделана ссылка на международные заявки, указанные в вводной части этого описания, которые касаются таких систем для буксировки судна.
Согласно другому аспекту изобретения предложен способ для управления аэродинамической ветровой движительной системой, в котором сигналы управления передают из базового модуля управления, расположенного на первом нижнем конце тягового троса, на дистанционный модуль управления, который установлен в устройстве управления, соединенном с верхним вторым концом тягового троса и прикрепленном к аэродинамическому элементу в виде крыла, для управления направлением полета аэродинамического элемента в виде крыла и устройством управления, причем направление полета управляется дистанционным модулем управления в том случае, если дистанционный модуль управления в течение заданного периода времени не получает управляющих сигналов.
Этот способ позволяет обеспечить точное управление полетом аэродинамического элемента в виде крыла в постоянном рабочем режиме с помощью передачи соответствующих сигналов управления с базового модуля управления и избежать того, что аэродинамический элемент в виде крыла становится неуправляемым в случае прерывания передачи сигналов управления или при нарушении нормальной работы посредством управления аэродинамическим элементом в виде крыла в таких случаях, которое осуществляется без использования дистанционного модуля управления, который непосредственно расположен внутри устройства управления. В таких случаях дистанционный модуль управления может продолжать производить управление на базе значений, рассчитанных с помощью экстраполирования предыдущих переданных сигналов управления, или может переключиться в режим аварийного управления, при котором используется заранее запрограммированная подпрограмма, что позволяет избежать того, что элемент в виде крыла станет неуправляемым.
В первом усовершенствованном варианте выполнения изобретения предпочтительно, чтобы дистанционный модуль управления удерживал устройство управления с определенной угловой ориентацией или в определенном диапазоне угловой ориентации относительно направления гравитации, по меньшей мере, в одной плоскости, предпочтительно, в большем количестве плоскостей, и, в частности, в трех плоскостях, ориентированных перпендикулярно друг другу. В этих пределах можно сослаться на предыдущее описание соответствующего варианта выполнения изобретения устройства управления, обеспечивающего возможность управления элементом в виде крыла в отношении к угловой ориентации относительно направления гравитации.
Более того, предпочтительно, чтобы дистанционный модуль управления последовательно направлял устройство управления согласно последовательности замкнутого контура с определенными угловыми ориентациями относительно направления гравитации, по меньшей мере, в одной плоскости, предпочтительно, в большем количестве плоскостей, и, в частности, в трех плоскостях, ориентированных перпендикулярно друг другу.
И последнее, предпочтительно, чтобы в случае прерывания передачи сигналов управления дистанционный модуль управления производил экстраполяцию последовательности последних сигналов управления, полученных от базового модуля управления, и рассчитывал последовательность будущих сигналов управления исходя из этой экстраполяции.
Предпочтительные варианты выполнения изобретения будут описаны со ссылками на чертежи, на которых представлено следующее:
фиг.1 - вид спереди на аэродинамический элемент в виде крыла с устройством управления согласно настоящему изобретению;
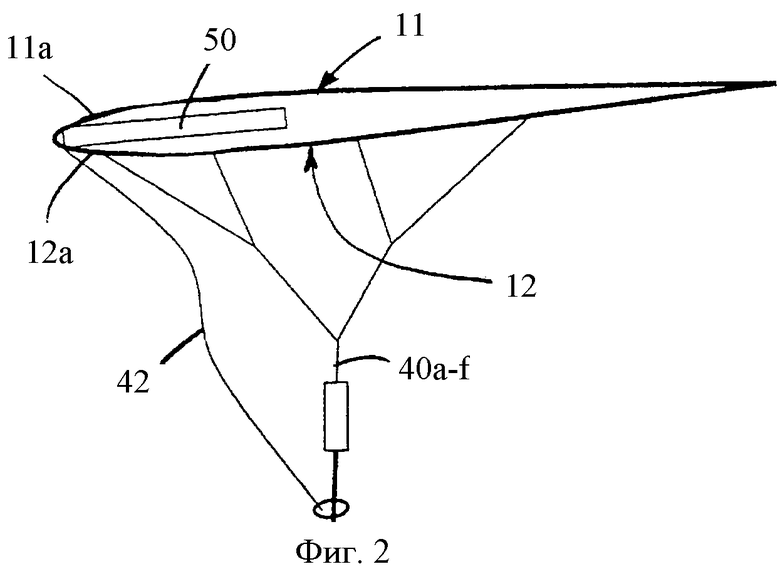
фиг.2 - вид сбоку на аэродинамический элемент в виде крыла и устройство управления по фиг.1;
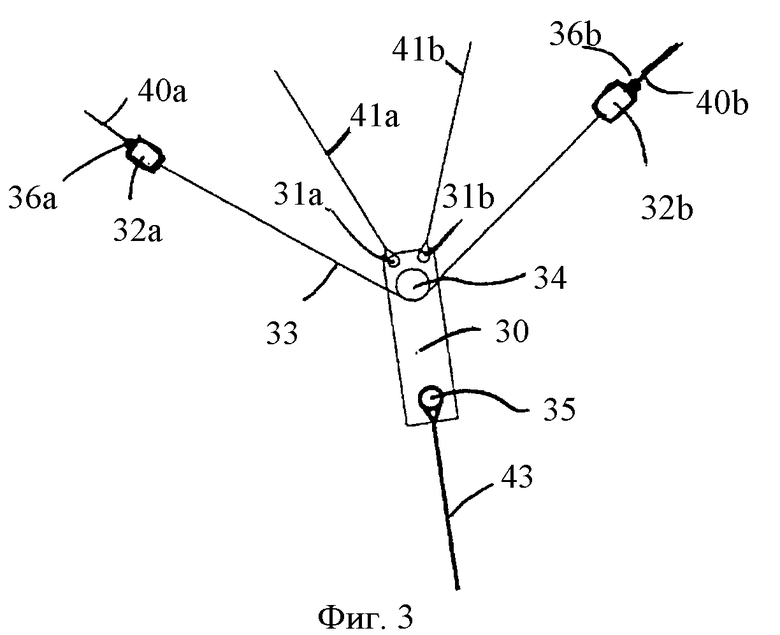
фиг.3 - детальный вид устройства управления, имеющего четыре прикрепленных тяговых троса для соединения с элементом в виде крыла и один тяговый трос для соединения с базовой станцией;
фиг.4 - схематичный чертеж точек приложения нагрузки устройства управления и их соединение через жгуты для натяжения,
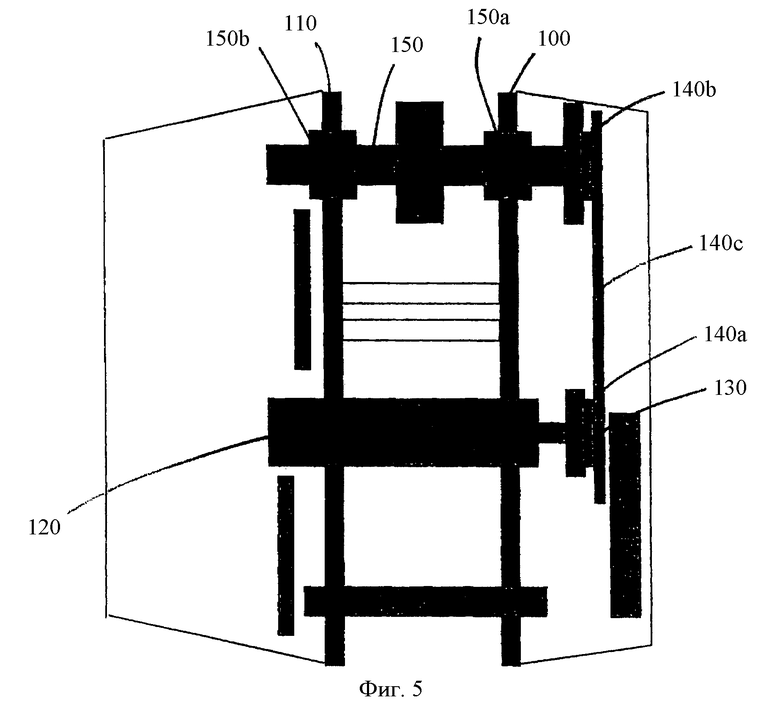
фиг.5 - вид сбоку на расположение компонентов внутри устройства управления согласно изобретению.
На фиг.1 и 2 показан аэродинамический элемент в виде крыла согласно изобретению, который может принимать форму, подобную уголковому отражателю 10, содержащему верхний слой 11 и нижний слой 12. На виде спереди согласно фиг.1 показаны четыре отверстия 20 a-d, которые видны на передней кромке 11a, 12a крыла. Эти отверстия производят вентилирование внутреннего пространства между верхним и нижним слоями 11, 12. Отверстия расположены около горизонтальной продольной оси аппарата, выполненного в виде уголкового отражателя. В поперечной зоне между передними кромками 11а и 12а отверстия не показаны.
Верхний и нижний слои соединены через множество ребер 21, показанных с помощью пунктирных линий на фиг.1. Сборка верхнего слоя, нижнего слоя и множества ребер обеспечивает гибкий элемент в виде крыла. Этот элемент в виде крыла прикреплен к устройству управления 30 через множество тяговых тросов. По существу, начиная с большого количества тросов, прикрепленных к элементу в виде крыла, эти тросы соединяются вместе и преобразуются в меньшее количество тросов во множестве объединительных ступеней (для большей ясности на фиг.1 показана только одна объединительная ступень, объединяющая два таких тяговых троса в один общий тяговый трос), и, в конечном итоге, множество тяговых тросов, прикрепленных к элементу в виде крыла, уменьшается до общего числа четырех тяговых тросов, прикрепленных к устройству управления 30.
Эти четыре тяговых троса состоят из двух управляющих тяговых тросов 40a, b и двух фиксированных тяговых тросов 41а, b. Как можно увидеть на фигуре, фиксированные тяговые тросы 41а, b присоединены к центральной зоне уголкового отражателя, при этом управляющие тяговые тросы 40а, b присоединены к двум боковым зонам уголкового отражателя, а именно левый управляющий тяговый трос 40а - к левой боковой зоне, а правый управляющий тяговый трос 40b - к правой боковой зоне.
Как показано на фиг.2, элемент в виде крыла прикреплен к некоторому количеству тяговых тросов, расположенных в продольном направлении таким же образом, как показано на фиг.1 для поперечного направления. Точки крепления тяговых тросов распределены вдоль продольного направления элемента в виде крыла и, в конечном итоге, объединяются в четыре тяговых троса, присоединенных к устройству управления таким же способом, как ранее описывалось для тех тяговых тросов, которые распределены вдоль поперечного направления элемента в виде крыла.
Жесткий стержень 50 уголкового отражателя прикрепляется к корпусу аппарата в виде змея вдоль продольной средней оси между верхним и нижним слоями 11, 12. Стержень 50 уголкового отражателя проходит вдоль, приблизительно, одной трети от общей длины уголкового отражателя. Направляющий трос 42 направляется к стержню 50 уголкового отражателя и предназначен для стартовых маневров уголкового отражателя или маневров во время приземления.
Тяговый трос 43 прикреплен к устройству 30 управления и связывает устройство управления с судном, которое должно буксироваться уголковым отражателем 10. Направляющий трос 42 прикрепляется с возможностью скользящего перемещения и может отсоединяться через кольцевой элемент 44, перемещающийся вдоль тягового троса 43.
Устройство 30 управления содержит две фиксированные точки 31a, b, к которым прикрепляются фиксированные тяговые тросы 41a, b (см. фиг.3).
Каждый из управляющих тяговых тросов 40а, b соединен с соответствующей подвижной точкой крепления 36а, b, расположенной на первом конце датчиков нагрузки 32а, b. Второй конец датчиков нагрузки 32а, b соединен с зубчатым ремнем 33, который соединяет два датчика нагрузки 32а, b. Зубчатый ремень 33 наматывается вокруг зубчатого колеса 34а внутри устройства 30 управления и таким образом прогибается. Вращение зубчатого колеса 34а будет изменять расстояние между подвижными точками крепления 36а, b, расположенными на датчиках нагрузки 32а, b, и зубчатым колесом 34 или верхними фиксированными точками крепления 31а, b. Кроме того, кривизна уголкового отражателя 10 может быть изменена, так как расстояние между одним из датчиков нагрузки 32а, b и верхними фиксированными точками крепления 31а, b увеличивается, и в то же самое время расстояние от другого датчика нагрузки 32а или b до этих верхних фиксированных точек крепления 31а, b уменьшается. Это приведет, в результате, к изменению направления полета уголкового отражателя.
Тяговый трос 43 прикрепляется к устройству управления в третьей фиксированной точке 35 крепления.
На фиг.4 показана механическая структура для передачи сил тяги от верхних фиксированных точек крепления 31а, b, опоры 34b для зубчатого колеса 34а к нижней фиксированной точке 35 крепления. Более того, углубление, сформированное с помощью трубки 37, для размещения в нем двигателя и зубчатой передачи для приведения в действие зубчатого колеса обеспечено между зубчатым колесом 34 и нижней фиксированной точкой 35 крепления. Между углублением, сформированным с помощью трубки 37, существует множество трубок, обеспечивающих углубления 38а-с для расположения силовых и сигнальных кабелей и двухпозиционного переключателя «вкл./выкл.».
Точки приложения нагрузки и точки крепления связаны через один волоконный жгут, намотанный вокруг них, и таким образом разделенный на множество секций.
Первая главная секция 60 волоконного жгута намотана вокруг трубки 37 и нижней фиксированной точки крепления, чтобы обеспечить жесткое и прочное соединение между ними. Дополнительная главная секция 61 волоконного жгута намотана вокруг трубки 37 и поддержки 34b для зубчатого колеса 34а. Третья главная секция 62 волоконного жгута намотана вокруг левой фиксированной точки крепления 31а, затем она наматывается вокруг поддержки 34b и таким образом перенаправляется, чтобы быть намотанной вокруг верхней правой фиксированной точки крепления 31b.
Кроме того, множество секций 63 прочных волоконных жгутов сформировано для прямого соединения верхних левой и правой фиксированных точек крепления 31a, b с нижней фиксированной точкой крепления.
Для увеличения жесткости всей механической структуры множество вторичных секций волоконного жгута намотано вокруг трубок, точек крепления и поддержек устройства управления.
На фиг.5 показана структура устройства управления. Устройство управления содержит поддерживающую раму, выполненную в виде первой поддерживающей пластины 100 и второй поддерживающей пластины 110. Первая и вторая поддерживающие пластины 100, 110 расположены параллельно друг другу на таком расстоянии, которое оставляет достаточно места для расположения между ними фиксированных точек крепления. Электрический двигатель 120 расположен таким образом, что его продольная ось перпендикулярна плоскости поддерживающих пластин 100, 110 и проходит через обе поддерживающие пластины. Электрический двигатель 120 соединен с понижающей зубчатой передачей 130 и, дополнительно, с ременной понижающей зубчатой передачей 140а-с, содержащей первое зубчатое колесо 140а, второе зубчатое колесо 140b и зубчатый ремень 140 с, соединяющий эти два зубчатых колеса 140а-b.
Второе зубчатое колесо 140b устанавливается на валу 150, который расположен параллельно продольной оси электрического двигателя 120 и закреплен с возможностью вращения внутри двух поддерживающих пластин 100, 110 соответственно через первый подшипник 150а вращения и второй подшипник 150b вращения.
Между двумя подшипниками 150а, b вращения зубчатое колесо 134 закреплено на валу 150. Зубчатое колесо входит в зацепление с ремнем (не показан), образуя сопряженное зубчатое соединение, которое переносит левую и правую подвижные точки крепления на соответствующих концах, как показано на фиг.3.
Устройство управления, показанное на фиг.5, дополнительно содержит контроллер 160, соединенный с электрическим двигателем 120, чтобы обеспечить сигналы управления для двигателя 120. Кроме того, три гироскопических датчика расположены в трех взаимно перпендикулярных направлениях, и три датчика линейного ускорения, также расположенные в трех взаимно перпендикулярных направлениях, интегрированы с устройством управления и соединены с ним, чтобы обеспечить контроллер информацией о существующем в данный момент фактическом ускорении устройства управления относительно трех перпендикулярных осей и трех перпендикулярных направлений.
Контроллер адаптирован таким образом, чтобы рассчитывать направление гравитации исходя из этих сигналов датчиков и обеспечить электрический двигатель 120 сигналами управления, чтобы следовать заданной последовательности угловых ориентаций устройства управления в соответствии с направлением гравитации.

Изобретение относится к привязным ветровым движителям и, в частности, к устройствам управления для судовой аэродинамической ветровой движительной системы. Устройство управления для ветровой движительной системы содержит первичные фиксирующие средства, предназначенные для фиксирования первого конца тягового троса, второй конец которого прикреплен к устройству или транспортному средству, например судну, которому будет передаваться тяговое усилие, а также вторичное фиксирующее средство, предназначенное для крепления заданного количества тяговых тросов, второй конец которых закреплен на аэродинамическом элементе в виде крыла, и механическую поддерживающую раму. Поддерживающая рама соединяет первичные фиксирующие средства с вторичными фиксирующими средствами для того, чтобы передавать тяговое усилие. Вторичные фиксирующие средства усовершенствованного устройства управления содержат, по меньшей мере, одну верхнюю фиксированную точку крепления, левую подвижную точку крепления, правую подвижную точку крепления и исполнительные средства управления для изменения расстояния между верхней фиксированной точкой крепления и левой подвижной точкой крепления, а также для изменения расстояния между верхней фиксированной точкой крепления и правой подвижной точкой крепления. Изобретение позволяет повысить маневренность и устойчивость транспортного средства при использовании ветровой движительной системы. 4 н. и 29 з.п. ф-лы, 5 ил.
1. Устройство управления для ветровой движительной системы, содержащее первичные фиксирующие средства (35) для фиксирования первого конца тягового троса (43), второй конец которого прикреплен к устройству или транспортному средству, которому будет передаваться тяговое усилие; а также вторичные фиксирующие средства (31а, b, 36а, b, 33, 34), предназначенные для крепления заданного количества тяговых тросов (40а, b, 41а, b), второй конец которых прикреплен к аэродинамическому элементу (11а, 12а, 21) в виде крыла; и механическую поддерживающую раму, соединяющую первичные фиксирующие средства с вторичными фиксирующими средствами для передачи силы тяги, отличающееся тем, что вторичные фиксирующие средства содержат:
по меньшей мере, одну верхнюю фиксированную точку (31a, b) крепления,
левую подвижную точку (36а) крепления,
правую подвижную точку (36b) крепления, и
исполнительные средства (33, 34, 120, 130, 140а-с) управления для изменения расстояния между верхней фиксированной точкой крепления и левой подвижной точкой крепления, а также для изменения расстояния между верхней фиксированной точкой крепления и правой подвижной точкой крепления.
2. Устройство управления по п.1, отличающееся тем, что исполнительные средства управления содержат исполнительный механизм (120, 34) для выборочного приведения в действие ремня (33) в альтернативных направлениях, при этом первый конец ремня формирует левую подвижную точку крепления, а второй конец ремня формирует правую подвижную точку крепления.
3. Устройство управления по п.2, отличающееся тем, что исполнительные средства управления содержат приводное колесо (34), которое установлено с возможностью вращения в механической поддерживающей раме, и ремень (33), который выполнен с возможностью наматывания, по меньшей мере частично, вокруг колеса, при этом первый конец ремня формирует левую подвижную точку крепления, а второй конец ремня формирует правую подвижную точку крепления.
4. Устройство управления по п.3, отличающееся тем, что приводное колесо выполнено в виде зубчатого колеса, а ремень выполнен в виде зубчатого ремня для формирования сопряженной зубчатой передачи.
5. Устройство управления по п.1, отличающееся тем, что исполнительные средства управления содержат первый исполнительный механизм, прикрепленный к поддерживающей раме и адаптированный к изменению расстояния между верхней фиксированной точкой крепления и левой подвижной точкой крепления, и второй исполнительный механизм, прикрепленный к поддерживающей раме и адаптированный к изменению расстояния между верхней фиксированной точкой крепления и правой подвижной точкой крепления.
6. Устройство управления по п.5, отличающееся тем, что первый и второй исполнительный механизм выполнены в виде пневматического или гидравлического цилиндра, первый конец которого прикреплен к поддерживающей раме, а второй конец формирует, соответственно, левую и правую подвижную точку крепления.
7. Устройство управления по п.1, отличающееся тем, что поддерживающая рама содержит, по меньшей мере, одну, предпочтительно две или большее количество поддерживающих пластин (100, 110).
8. Устройство управления по п.1, отличающееся тем, что поддерживающая рама содержит, по меньшей мере, две поддерживающие пластины (100, 110), расположенные на расстоянии одна от другой, и образующие слоеную структуру с, по меньшей мере, одной верхней фиксированной точкой крепления и средствами первичного крепления.
9. Устройство управления по п.1, отличающееся тем, что точки приложения нагрузки средств первичного фиксированного крепления и средства вторичного крепления соединены напряженными волоконными жгутами для передачи тяговых сил.
10. Устройство управления по п.1, отличающееся тем, что поддерживающая рама содержит, по меньшей мере, две поддерживающие пластины, расположенные на расстоянии одна от другой, а также средства первичного фиксированного крепления и средства вторичного фиксированного крепления, которые содержат жесткие стержни, проходящие из одной поддерживающей пластины к другой и соединенные напряженными волоконными жгутами для передачи тяговых сил.
11. Устройство управления по п.10, отличающееся тем, что напряженные волоконные жгуты содержат первый набор волоконных жгутов, смежный с первым набором поддерживающих пластин, и второй набор жгутов, смежный с другим набором поддерживающих пластин.
12. Устройство управления по п.1, отличающееся тем, что содержит левую (31а) и правую верхнюю фиксированную точку (31b) крепления, причем эти верхние фиксированные точки крепления и средства первичного крепления являются стержнями, проходящими из первой поддерживающей пластины ко второй поддерживающей пластине, которая расположена параллельно первой поддерживающей пластине, при этом цилиндрические стержни соединены напряженными волоконными жгутами, которые выполнены с возможностью наматывания, по меньшей мере частично, вокруг стержней, и которые содержат:
первый волоконный жгут, проходящий от стержня для левой второй фиксированной точки крепления к стержню средств первичного
крепления;
второй волоконный жгут, проходящий от стержня для правой второй фиксированной точки крепления к стержню средств первичного крепления;
третий волоконный жгут, проходящий от точки приложения нагрузки для подвижных точек крепления к стержню средств первичного крепления для передачи тяговых сил.
13. Устройство управления по п.1, отличающееся тем, что, по меньшей мере, одна из подвижных точек крепления и/или средства первичного крепления, присоединены к поддерживающей раме через датчик для измерения нагрузки.
14. Устройство управления по п.1, отличающееся тем, что содержит подвижные средства крепления для управления подъемной силой аэродинамического элемента в виде крыла, которые соединены, по меньшей мере, с одним тяговым тросом, прикрепленным к аэродинамическому элементу в виде крыла в зоне между передней кромкой крыла и задней кромкой крыла.
15. Устройство управления по п.1, отличающееся тем, что подвижные средства крепления для управления подъемной силой аэродинамического элемента в виде крыла содержат левые подвижные средства крепления и правые подвижные средства крепления, которые соединены так, что, по меньшей мере, один тяговый трос прикреплен к левой части и, соответственно, правой части аэродинамического элемента в виде крыла, в зоне между передней кромкой крыла и задней кромкой крыла.
16. Устройство управления по п.1, отличающееся тем, что устройство управления содержит накопитель энергии, датчик для определения ориентации и/или степени поворота устройства управления, положения устройства управления и/или, по меньшей мере, одного полетного параметра устройства управления, и контроллер для управления направлением полета аэродинамического элемента в виде крыла, прикрепленный к устройству управления, при этом контроллер соединен с датчиками и накопителем энергии и выполнен с возможностью управления исполнительным механизмом для изменения направления полета аэродинамического элемента в виде крыла, базирующегося на сигналах датчиков.
17. Устройство управления по п.16, отличающееся тем, что контроллер выполнен с возможностью управления исполнительным механизмом для изменения направления полета аэродинамического элемента в виде крыла без внешнего ввода в устройство управления.
18. Устройство управления по п.17, отличающееся тем, что контроллер содержит логический модуль, запрограммированный для управления исполнительным механизмом, при этом аэродинамический элемент в виде крыла поддерживает высоту полета выше минимального значения.
19. Устройство управления по п.16 или 18, отличающееся тем, что накопитель энергии содержит электрическую, предпочтительно перезаряжаемую батарею, конденсатор и/или воздушный аккумулятор.
20. Устройство управления по п.16, отличающееся тем, что логический модуль, программируется:
для сохранения аэродинамического элемента в виде крыла на фиксированной высоте или внутри фиксированного диапазона высот;
для направления аэродинамического элемента в виде крыла вдоль заданной замкнутой полетной траектории, и/или
для сохранения аэродинамического элемента в виде крыла на траектории прямолинейного полета, распространяющейся в горизонтальной плоскости.
21. Устройство управления по п.16, отличающееся тем, что контроллер соединен, по меньшей мере, с одним датчиком, определяющим угловую позицию устройства управления относительно направления гравитации, и запрограммирован для поддержания фиксированной угловой ориентации или диапазона угловой ориентации, или запрограммированной последовательности угловых ориентации в, по меньшей мере, одной плоскости, предпочтительно в большем количестве плоскостей, и, в частности, трех плоскостях, ориентированных перпендикулярно друг другу и относительно направления гравитации.
22. Устройство управления по п.16, отличающееся тем, что контроллер соединен с тремя гироскопическими датчиками, расположенными в трех направлениях, перпендикулярных друг другу, и тремя датчиками линейного ускорения, расположенными в трех направлениях, перпендикулярных друг другу, при этом контроллер запрограммирован для оценки направления гравитации, с помощью сигналов от этих датчиков.
23. Устройство управления по п.16, отличающееся тем, что вторичные средства крепления содержат, по меньшей мере, одну верхнюю фиксированную точку, левую подвижную точку крепления, а также правую подвижную точку крепления, и средства исполнительной части устройства управления, предназначенные для изменения расстояния между верхней фиксированной точкой крепления и левой подвижной точкой крепления, а также для изменения расстояния между правой фиксированной точкой крепления и правой подвижной точкой крепления, причем контроллер соединен с датчиком для измерения нагрузки, связывающим поддерживающую раму и средства первичного крепления и предназначенным для измерения силы тяги аэродинамического элемента в виде крыла, а также с датчиком для измерения нагрузки, связывающим поддерживающую раму и левые подвижные точки крепления, для измерения левой управляющей силы, и с датчиком для измерения нагрузки, связывающим поддерживающую раму и правые подвижные точки крепления, для измерения правой управляющей силы, и с GPS навигатором, и/или анемометром.
24. Аэродинамическая ветровая движительная система, содержащая аэродинамический элемент в виде крыла, соединенный посредством заданного количества тяговых тросов, прикрепленных к крылу через множество точек крепления, которые расположены на расстоянии одна от другой по ширине крыла, с устройством управления, по любому из пп.1-23, отличающаяся тем, что:
заданное количество левых тяговых тросов объединены и присоединены к левой подвижной точке крепления;
заданное количество центральных левых тяговых тросов объединены и присоединены к левой фиксированной точке крепления;
заданное количество центральных правых тяговых тросов объединены и присоединены к правой фиксированной точке крепления; и
заданное количество правых тяговых тросов объединены и присоединены к правой подвижной точке крепления.
25. Система по п.24, отличающаяся тем, что устройство управления содержит дополнительные подвижные средства крепления для управления подъемной силой аэродинамического элемента в виде крыла, которое соединено, по меньшей мере, с одним, предпочтительно с заданным количеством тросов, для управления подъемной силой, прикрепленных к аэродинамическому элементу в виде крыла, в зоне между передней кромкой крыла и задней кромкой крыла.
26. Система п.24, отличающаяся тем, что, по меньшей мере, один из тросов для управления подъемной силой прикреплен к аэродинамическому элементу в виде крыла на расстоянии в одну четверть от длины аэродинамического элемента в виде крыла за передней кромкой крыла.
27. Система по п.24, отличающаяся тем, что заданное количество тросов для управления подъемной силой прикреплено к аэродинамическому элементу в виде крыла вдоль направления по ширине центральной зоны.
28. Система по п.25, отличающаяся тем, что дополнительные подвижные средства крепления для управления подъемной силой аэродинамического элемента в виде крыла содержат левые подвижные средства крепления и правые подвижные средства крепления, которые соединены, по меньшей мере, с одним тяговым тросом, прикрепленным, соответственно, к левой зоне и правой зоне аэродинамического элемента в виде крыла, на участке между передней и задней кромкой крыла.
29. Судно, соединенное через тяговый трос со средствами первичного крепления устройства управления ветровой движительной системой по п.24.
30. Способ управления аэродинамической ветровой движительной системой, в котором сигналы управления передают от базового модуля управления, расположенного на первом нижнем конце тягового троса, к дистанционному пульту управления, установленному в устройстве управления и прикрепленному к верхнему второму концу тягового троса и прикрепленному к аэродинамическому элементу в виде крыла, для управления направлением полета аэродинамического элемента в виде крыла и устройством управления, отличающийся тем, что направлением полета управляют с помощью дистанционного модуля управления в том случае, если дистанционный модуль управления не получает сигналы управления в течение заданного периода времени.
31. Способ по п.30, отличающийся тем, что с помощью дистанционного модуля управления удерживают устройство управления в состоянии определенной угловой ориентации или диапазоне угловой ориентации относительно направления гравитации, по меньшей мере, в одной плоскости, предпочтительно, в большем количестве плоскостей, и, в частности в трех плоскостях, ориентированных перпендикулярно друг другу.
32. Способ по п.30, отличающийся тем, что с помощью дистанционного модуля управления последовательно направляют устройство управления согласно последовательности замкнутого контура определенных угловых ориентаций относительно направления гравитации, по меньшей мере, в одной плоскости, предпочтительно, в большем количестве плоскостей, и, в частности в трех плоскостях, ориентированных перпендикулярно друг другу.
33. Способ по п.30, отличающийся тем, что в случае прерывания передачи сигналов управления дистанционный модуль управления выполняет экстраполяцию последовательности последних сигналов управления, полученных от базового модуля управления, и рассчитывает последовательность будущих сигналов управления, исходя из этой экстраполяции.
| US 6918346 В2, 19.07.2005 | |||
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ОХЛАДИТЕЛЬНЫМ ДОЖДЕВАНИЕМ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 1993 |
|
RU2098946C1 |
| СУДНО, ДВИЖИМОЕ ВЕТРОМ | 2001 |
|
RU2265551C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

