Изобретение относится к радиолокационным методам и может быть использовано в когерентно-импульсных радиолокационных станциях (РЛС) сопровождения для формирования доплеровских портретов воздушных объектов, адекватно отражающих их поперечные линейные размеры.
Известен способ выбора положения интервала инверсного синтезирования апертуры с возможностью оценки угловой скорости поворота летательного аппарата (ЛА) относительно радиолокатора [1], заключающийся в том, что с помощью когерентно-импульсной РЛС излучают в направлении воздушного объекта (ВО) сверхвысокочастотные сигналы, принимают отраженные сигналы, автоматически сопровождают ВО по дальности и угловым координатам, определяют дальность R1, угол места ε1 и азимут β1 ВО в начальный момент сопровождения, определяют дальность R2, угол места ε2 и азимут β2 ВО через интервал ΔТ=1 с, пересчитывают измеренные сферические координаты ВО для двух указанных моментов времени в прямоугольные (x1, y1, z1) и (х2, y2, z2), определяют пройденный воздушным объектом путь ΔR за время ΔT по формуле (фиг.1)

рассчитывают величину угла между начальным и конечным положением линии визирования объекта (ЛВО) но формуле

рассчитывают скорость ВО V по формуле V=ΔR/ΔT, выбирают величину необходимого поперечного разрешения δR⊥, рассчитывают длительность интервала инверсного синтезирования ΔТис по формуле
где λ - длина волны; γ - угол между ЛВО в начальный момент времени и линией пути (вектором линейной скорости) ВО, произвольным образом выбирают в пределах интервала ΔТ положение интервала инверсного синтезирования апертуры ΔТис, считая, что угловая скорость поворота ВО ξ на этом интервале равна ξ=Vsinγ/R1.
Недостатком данного способа является то, что способ не учитывает влияния траекторных нестабильностей (ТН) полета в виде рысканий планера ВО, движущегося в турбулентной атмосфере [2]. А вследствие этих случайных квазипериодических рысканий угловая скорость поворота ЛА постоянно и нелинейно изменяется. При изменении угловой скорости поворота ВО за счет ТН разрешающая способность δR⊥ соответствующим образом изменяется. Результирующая угловая скорость поворота ВО представляет собой векторную сумму угловой скорости поворота ЛА за счет перемещения его центра масс по прямолинейной (на малом участке пути) траектории ξпр и угловой скорости рысканий планера ξтн при ТН в турбулентности. Разделить эти две составляющие при оценке реальной угловой скорости не удается. А в результате непредсказуемости величины угловой скорости вращения ЛА относительно РЛС правильный выбор длительности интервала инверсного синтезирования ΔТис затруднителен. Известный в настоящее время способ выбора интервала инверсного синтезирования [1] не обеспечивает ни возможности правильного расчета угловой скорости поворота ВО ξ, ни возможности выбора верной величины самого интервала ΔТис. Если, к примеру, угловые скорости ξпр и ξтн окажутся на произвольно выбранном интервале равными по величине и противоположными по направлению, то ракурс сопровождаемого ВО изменяться не будет, и амплитудно-фазовые флюктуации отраженных сигналов, необходимые для реализации метода инверсного синтезирования апертуры, будут минимизированы. Вследствие этого реализация метода инверсного синтезирования апертуры в интересах получения доплеровского портрета воздушного объекта [3, 4, 5] становится невыполнимой.
Известен также способ выбора положения интервала инверсного синтезирования апертуры при наличии ТН полета ВО с возможностью оценки угловой скорости его поворота относительно радиолокационной станции [6], заключающийся в том, что с помощью когерентно-импульсной РЛС излучают в направлении воздушного объекта сверхвысокочастотные импульсные сигналы, период повторения Ти излучаемых импульсных сигналов когерентно-импульсной РЛС выбирают не более 1 мс, принимают отраженные от ВО сигналы, в процессе приема отраженных сигналов проводят регистрацию, перевод в цифровую форму и запись в оперативное запоминающее устройство когерентно-импульсной РЛС значений амплитуды и точного времени приема каждого отраженного импульсного сигнала на избыточном длительном порядка 10 секунд интервале Δtизб, автоматически сопровождают объект по дальности и угловым координатам, определяют дальность R1, угол места ε1 и азимут β1 ВО в начальный момент сопровождения, определяют дальность R2, угол места ε2 и азимут β2 ВО через интервал ΔТ=1 с, пересчитывают измеренные сферические координаты ВО для двух указанных моментов времени в прямоугольные (x1,y1,z1) и (х2,у2,z2), определяют пройденный объектом путь ΔR за время ΔT по формуле

рассчитывают величину угла между начальным и конечным положением ЛВО по формуле
рассчитывают скорость ВО V по формуле V=ΔR/ΔT, выбирают величину необходимой разрешающей способности δR⊥ в поперечном относительно ЛВО направлении, рассчитывают длительность интервала инверсного синтезирования апертуры ΔТис по формуле
где λ - длина волны; γ - угол между ПВО в начальный момент времени и линией пути объекта. Считают, что угловая скорость поворота ВО ξ на выбираемом интервале инверсного синтезирования апертуры ΔТис равна ξ=Vsinγ/R1. Далее
формируют из значений амплитуд и времен приема отраженных импульсов двумерный массив M1 из S столбцов, в каждый s-й столбец которого записывают информацию об амплитуде и времени приема s-го сигнала из S сигналов, принятых за интервал Δtизб, вектор элементов строки массива Ml с величинами амплитуд отраженных сигналов принимают за отражательную характеристику ВО, устраняют методом скользящего усреднения высокочастотную турбовинтовую модуляцию отражательной характеристики объекта (OXO), в результате получают планерную отражательную характеристику объекта (ПОХО), заменяют значения OXO в массиве M1 соответствующими значениями ПОХО, задают величину оценочного времени корреляции τоц=3 мс, вычисляют значение q=G(τоц/Ти), где G(τоц/Ти) - функция нахождения целой части числа Тоц/Тц, определяют число элементов I частной выборки отраженных сигналов, выполняя условие, чтобы I входило в диапазон от 50 до 200, последовательно смещают частную выборку сигналов на один отсчет в пределах ПОХО от первого положения, соответствующего участку планерной отражательной характеристики объекта с первого по I-й отсчет, до (S-I+1)-го положения, соответствующего участку планерной отражательной характеристики объекта с (S-I+1)-го по S-й отсчет, для каждого k-го положения частной выборки рассчитывают величину оценочного нормированного коэффициента автокорреляции по формуле

где x(i) - величина i-го элемента частной выборки в соответствующем k-м положении, состоящей из I элементов, mx - математическое ожидание амплитуды принимаемого сигнала в пределах ПОХО. Затем связывают рассчитанный на k-м шаге коэффициент автокорреляции (КАК) с временем начала соответствующей частной выборки, составляют из рассчитанных коэффициентов автокорреляции и соответствующих им времен двумерный массив М2, в первой строке которого располагают с первого по К-й коэффициенты автокорреляции, принимают вектор элементов этой строки за корреляционную характеристику объекта (КХО), сглаживают КХО методом скользящего усреднения, в результате получают сглаженную корреляционную характеристику объекта (СКХО), заменяют значения КХО массива М2 соответствующими значениями сглаженной корреляционной характеристики объекта, находят в пределах этой СКХО точки экстремумов, выбирают из них два смежных экстремума, находят их среднее арифметическое Z, определяют на интервале между используемыми экстремумами m-й элемент первой строки массива М2, наиболее близкий по значению сглаженного коэффициента автокорреляции к рассчитанной величине Z, принимают соответствующее ему m-е значение времени приема отраженного сигнала за середину интервала инверсного синтезирования апертуры tc, определяют время tн начала интервала инверсного синтезирования апертуры ΔТис по формуле tн=tс-ΔТис/2.
Данный способ в отличие от способа [1] учитывает возможность наличия у ВО траекторных нестабильностей полета, в результате чего является более точным и адаптивным. Однако существенным недостатком описанного способа [6] является то, что при малых размерах сопровождаемого ВО формируемая СКХО становится монотонной, т.е. в ней отсутствуют глобальные, а иногда и локальные экстремумы. Эти экстремумы необходимы для правильного выбора положения интервала инверсного синтезирования апертуры (ИСА). С точки зрения анализатора отраженных объектом сигналов отсутствие экстремумов может быть следствием либо углового замирания ВО на рассматриваемом интервале, либо недостаточной длительности частной выборки (ЧВ) сигналов, с помощью которой получают КХО, т.е. недостаточной чувствительности алгоритма расчета коэффициента автокорреляции.
И в том, и в другом случае результаты ИСА будут непригодными для практических нужд и измерений. При отсутствии поворота объекта получение его доплеровского портрета [4, 5] невозможно в принципе, так как отсутствуют причины возникновения вторичного доплеровского эффекта [3]. Во втором случае возникает иллюзия отсутствия поворотов планера объекта за счет ТН, т.е. в результате неверного выбора параметров обработки отраженных сигналов фиксируется отсутствие рысканий планера ЛА, хотя на самом деле они могут иметь место. В итоге положение интервала ИСА выбирают неверно.
Задачей изобретения является формирование такого способа выбора положения интервала ИСА при наличии ТН полета ВО, при котором малые размеры объекта не приводят к ошибкам принятия решения. То есть назначение изобретения состоит в обеспечении возможности правильного выбора интервала ИСА в любых условиях независимо от размеров ВО и его поведения.
Для решения этой задачи предлагается в дополнение к пунктам реализации способа-прототипа [6] адаптивно обеспечивать глубину модуляции сглаженной корреляционной характеристики объекта не менее 0,3 за счет обоснованного и адаптивного увеличения длины частной выборки, используемой для получения КХО. В интересах осуществления выдвинутой идеи для конкретной РЛС в конкретном режиме ее функционирования предлагается получать зависимость коэффициента прореживания данных (коэффициента удлинения ЧВ) от числа лепестков ПОХО при средних угловых скоростях поворота объекта за счет рысканий на фиксированном длительном интервале порядка 5 секунд. Зависимость может представлять собой таблицу, аналитическое выражение и т.п. Такая зависимость должна предполагать, чтобы глубина модуляции получаемой СКХО принимала значение не менее 0,3. Тогда после формирования в реальном режиме работы РЛС амплитудной OXO, получения из нее планерной отражательной характеристики ВО предлагается производить подсчет числа лепестков в этой реальной ПОХО на интервале 5 секунд и по числу лепестков с помощью таблицы или аналитической зависимости определять величину нужного коэффициента прореживания (КП) данных для формирования ЧВ. Используя значение КП, предлагается увеличивать длительность частной выборки путем прореживания данных в исходной ПОХО. Измененную ЧВ предлагается использовать для формирования КХО аналогично тому, как того требует способ-прототип [6].
Процедура практического использования коэффициента прореживания в новом предлагаемом способе такова. Если КП kпр равен двум, то в ЧВ следует брать каждое второе значение из ПОХО, т.е. ЧВ необходимо составлять из 1-го, 3-го, 5-го, 7-го и т.д. значений ПОХО. Если КП равен трем, то ЧВ будет (должна) содержать 1-е, 4-е, 7-е, 10-е и т.д. значения ПОХО. Если КП равен четырем, то ЧВ будет (должна) содержать 1-е, 5-е, 9-е, 13-е и т.д. значения ПОХО. Если ЧВ должна состоять из I элементов, то в зависимости от величины kпр i-й член частной выборки будет представлен членом ПОХО, номер которого в ПОХО можно вычислить по формуле (ikпр-kпр+1)=[(i-1)kпр+1]. Как показывает формула, с увеличением kпр соответствующим образом увеличивается длительность ЧВ при сохранении числа ее членов. С увеличением длительности ЧВ повышается чувствительность оценочного КАК к изменению угловой скорости поворота ВО относительно РЛС. Это увеличивает глубину модуляции СКХО до 0,3 в случае малых габаритов сопровождаемого ВО. Для ВО больших размеров глубина модуляции СКХО при использовании КП также существенно вырастет.
Если угловая скорость поворота ВО отсутствует, то в ПОХО число лепестков станет настолько малым, что величина КП будет составлять от десятков до сотен единиц, что приводит к соизмеримости ЧВ с избыточным интервалом анализа Δtизб. А это, в свою очередь, приводит к невозможности получения КХО в пределах избыточного интервала.
В случае небольших габаритов ВО число лепестков ПОХО уменьшается всего лишь в несколько раз (не более 20-30), что позволяет с помощью прореживания искусственно доводить глубину модуляции нормированной СКХО до 0,3. А этого вполне достаточно для выделения экстремумов. Значение 0,3 выбрано эмпирическим путем. Вполне приемлемо использовать и другое значение (например, 0,4 или 0,5). Значение 0,3 является минимально допустимым и обеспечивает уверенное выделение экстремумов функции при умеренном прореживании. Увеличение глубины модуляции требует увеличения КП.
Таким образом, при снижении числа лепестков ПОХО на интервале длительностью 5 секунд до 20 штук (но не менее 20) предлагается использовать КП, извлекаемый из заранее сформированной зависимости. А при числе лепестков менее 20 - следует констатировать отсутствие вращения ВО относительно РЛС и невозможность применения метода ПСА.
Сущность изобретения состоит в следующем. Оценочный КАК показывает степень изрезанности амплитудной огибающей, выраженной данными соответствующей ЧВ. Чем сильнее изрезанность, тем ниже оценочный КАК. Этот факт является известным [7]. Использование прореживания данных в ПОХО приводит к искусственному усилению степени изрезанности части ПОХО, заключенной в ЧВ, и к соответствующему понижению величины коэффициента автокорреляции в местах максимизации изрезанности. Поэтому при слабой модуляции СКХО, вследствие чего невозможно точно определить положение интервала ИСА, необходимо пользоваться прореживанием данных, используемых при анализе.
Если принять достаточное значение глубины модуляции нормированной СКХО равным 0,3, то при разных начальных условиях потребуются разные КП. Значение КП kпр зависит от поперечного размера объекта L⊥, угловой скорости его поворота относительно РЛС ξ, а также от величины периода повторения импульсов, который определяет период квантования данных.
В общем случае задача выбора kпр является многокритериальной. Однако скрупулезное изучение зависимости kпр от различных факторов и условий показало, что на практике целесообразно связывать КП с числом лепестков амплитудной ПОХО на выбранном интервале, так как число лепестков является функцией тех же самых параметров (зависит от тех же факторов). Угловая скорость поворота ξ с течением времени может изменяться. Поэтому нельзя подсчитывать число лепестков на малом по длительности интервале. Для усреднения числа лепестков, приходящихся в различных условиях на фиксированный интервал, следует увеличивать длительность интервала подсчета. Для гарантированного выделения интервала с максимальной, минимальной или средней угловой скоростью поворота ВО ξ длительность избыточного интервала ПОХО, на котором проводят подсчет лепестков, должна составлять до 5 секунд [8].
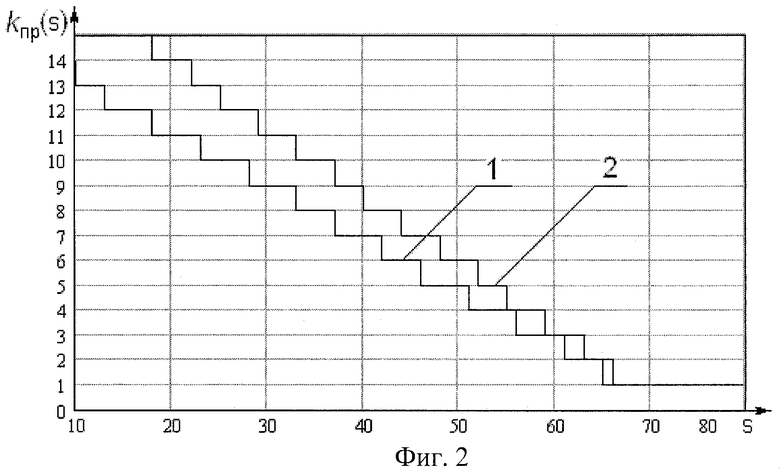
Для разработки способа были проведены специальные исследования зависимости КП от числа лепестков s в амплитудной ПОХО на интервале 5 секунд при глубине модуляции СКХО, равной 0,3. Результаты этих исследований в виде двух ступенчатых характеристик представлены на фиг.2. Отличие характеристик заключается в величине используемого оценочного времени корреляции τоц [7].
Цифрой 1 на фиг.2 отмечена зависимость, полученная экспериментально при τоц=0,768 мс, а цифрой 2 - зависимость, полученная при tоц=0,384 мс.
Как видно, kпр закономерно увеличивается при снижении числа лепестков s в амплитудной ПОХО. Поскольку форма характеристик зависит от параметров РЛС, уровня внутренних шумов приемника, методов сглаживания ПОХО и т.д., для каждой РЛС зависимости kпр=F(s) должны уточняться экспериментально, после чего допустимо их использование в алгоритмах обработки. Если у РЛС имеются разные режимы работы с разными зондирующими сигналами и разными периодами повторения Ти, то зависимости kпрF(s) должны быть получены для каждого режима отдельно. Применение той или иной зависимости определяется используемым режимом зондирования пространства (сопровождения ВО).
Число лепестков в ПОХО на фиксированном по длительности интервале постоянно меняется. Причиной служит изменение ракурса локации и непостоянство угловой скорости поворота ВО относительно РЛС при ТН (рысканиях). Поскольку усреднение данных становится более состоятельным и эффективным при большей длительности интервала усреднения, то для подсчета числа лепестков ПОХО целесообразно использовать весь избыточный интервал записи данных Δtизб. Так как Δtизб=10 с, то число подсчитанных лепестков следует разделить на 2, а полученное на пятисекундном интервале число лепестков округлить до ближайшего целого. Это число и рекомендуется использовать как аргумент функции определения КП.
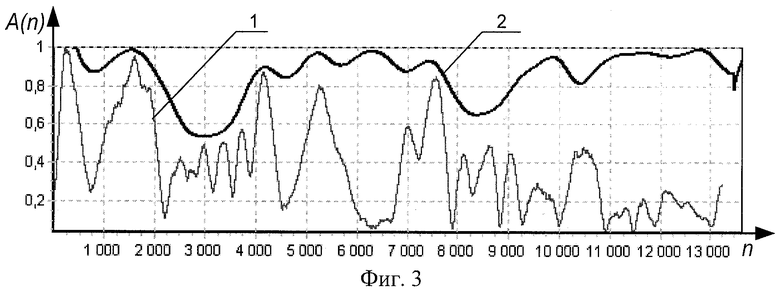
Проверка работоспособности корреляционного способа выделения информативных интервалов инверсного синтезирования апертуры проводилась на реальных цифровых амплитудных ПОХО, полученных в ходе натурных экспериментов. К эксперименту привлекались российские истребители двух типов. На фиг.3 представлена амплитудная ПОХО истребителя первого типа, полученная при дальности до ВО 60 км и курсовом угле 75°.
Цифрой 1 на фиг.3 отмечена сама амплитудная ПОХО, а цифрой 2 -сформированная по ней СКХО. При получении СКХО использован kпр=3 при длине ЧВ, равной 250Ти, где Ти - период повторения импульсов РЛС, равный в данном случае 1 мс. Локальные минимумы СКХО приходятся на интервалы наибольшей изрезанности ПОХО, в которых ширина лепестков минимальна. Аналогичные результаты получены при обработке амплитудной ПОХО истребителя второго типа, показанной на фиг.4.
Математическое моделирование и обработка данных натурных экспериментов показывают, что использование КП для увеличения глубины модуляции СКХО приводят к правильному выбору положения интервала PICA при угловых скоростях поворота ВО не менее 0,2% даже для самых малогабаритных ЛА. А для крупногабаритных воздушных объектов это становится возможным при угловых скоростях до 0,04%. Этим подтверждается технический эффект предлагаемого способа.
Предлагаемый способ выбора положения интервала инверсного синтезирования апертуры при наличии ТН полета ВО с возможностью оценки угловой скорости его поворота относительно радиолокатора является одним из элементов развития теории обработки сигналов [9, 10, 11], отраженных от сложного сосредоточенного аэродинамического ВО при его полете. Развитие теории проводится в интересах формирования достоверных радиолокационных изображений ЛА. Основная идея развития теории обработки заключается в переходе от статистического усреднения параметров отраженных сигналов к выявлению интервалов OXO с детерминированным изменением ракурса ВО. Способы определения таких интервалов основаны на зависимости корреляционных свойств реализации отраженных сигналов от скорости изменения углового положения ЛА, которая определяется пространственным ракурсом, дальностью, линейной скоростью объекта, а также уровнем ТН его полета.
Источники информации
1. Стайнберг Б.Д. Формирование радиолокационного изображения самолета в диапазоне СВЧ // ТИИЭР, 1988. №12. Т.76. С.26-46 (аналог).
2. Доброленский Ю.П. Динамика полета в неспокойной атмосфере. М.: Машиностроение, 1969. 256 с.
3. Патент РФ №2099742 от 20.12.1997. Митрофанов Д.Г. Триангуляционный способ построения двумерного радиолокационного изображения в РЛС сопровождения с инверсным синтезированием апертуры. Заявка №95115789. Приоритет 7.09.1995. Бюлл. №35. Часть 2. С.563.
4. Митрофанов Д.Г. Развитие методов формирования доплеровских портретов и двумерных радиолокационных изображений воздушных целей. - М.: Оборонная техника, 1998. №10-11. С.75-81.
5. Митрофанов Д.Г. Синтез радиолокационного изображения цели методом математического моделирования ее доплеровских портретов // Известия вузов. Радиоэлектроника, 1994. Т. 37. №3. С.72-76.
6. Патент РФ №2360267 от 27.06.2009. Митрофанов Д.Г., Прохоркин А.Г., Майоров Д.А., Сафонов А.В., Бортовик В.В. Способ выбора интервала инверсного синтезирования с рассчитываемой угловой скоростью поворота цели относительно радиолокатора. Заявка №2007141139. Приоритет 6.11.2007. Бюлл. №18 (прототип).
7. Митрофанов Д.Г., Прохоркин А.Г., Нефедов С.И. Измерение габаритов летательных аппаратов в условиях турбулентности на основе инверсного синтезирования апертуры // Измерительная техника, 2008. №8. с.24-28.
8. Майзельс Е.Н., Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей. М.: Сов. радио, 1972. - 232 с.
9. Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь, 1983. 536 с.
10. Радиоэлектронные системы. Справочник. Основы построения и теория. / Под ред. Я.Д. Ширмана. - М.: Радиотехника. 2007. 510 с.
11. Теоретические основы радиолокации. / Под ред. Я.Д. Ширмана. - М.: Сов.радио, 1970. 560 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫБОРА ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ С РАССЧИТЫВАЕМОЙ УГЛОВОЙ СКОРОСТЬЮ ПОВОРОТА ЦЕЛИ ОТНОСИТЕЛЬНО РАДИОЛОКАТОРА | 2007 |
|
RU2360267C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНОГО РАДИОЛОКАЦИОННОГО ОБЪЕКТА НАБЛЮДЕНИЯ С ВЫБОРОМ ИНТЕРВАЛА МАКСИМИЗАЦИИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ПРИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЯХ ДВИЖЕНИЯ | 2010 |
|
RU2427001C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА ВОЗДУШНОГО ОБЪЕКТА С МАЛЫМ КУРСОВЫМ УГЛОМ ПЕРЕМЕЩЕНИЯ | 2009 |
|
RU2410717C2 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИЗНАКОВ ИДЕНТИФИКАЦИИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СВЕРХРАЗРЕШЕНИЯ | 2015 |
|
RU2589737C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ПО ТРАЕКТОРНЫМ НЕСТАБИЛЬНОСТЯМ ЕЕ ПОЛЕТА | 2000 |
|
RU2180445C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ВЫЯВЛЕНИЯ ЗАКОНА ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ ПОВОРОТА СОПРОВОЖДАЕМОГО ВОЗДУШНОГО ОБЪЕКТА ПО ПОСЛЕДОВАТЕЛЬНО ПРИНЯТЫМ ОТРАЖЕНИЯМ СИГНАЛОВ С ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2013 |
|
RU2525829C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета | 2018 |
|
RU2679396C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |

Изобретение относится к радиолокационным методам и может быть использовано в когерентно-импульсных радиолокационных станциях. Способ заключается в том, что адаптивно увеличивают глубину модуляции сглаженной корреляционной характеристики объекта до уровня 0,3, что обеспечивает выделение экстремумов в этой характеристике, необходимых для правильного выбора интервала инверсного синтезирования апертуры. Увеличение глубины модуляции выполняется методом увеличения длительности частной выборки планерной отражательной характеристики объекта на основе прореживания данных в исходной планерной отражательной характеристике. Выбор коэффициента прореживания осуществляется подсчетом числа лепестков на пятисекундном интервале планерной отражательной характеристики объекта. Технический результат заключается в уменьшении количеств ошибок принятия решений. 4 ил.
Способ выбора положения интервала инверсного синтезирования апертуры при наличии траекторных нестабильностей полета воздушного объекта с возможностью оценки угловой скорости его поворота относительно радиолокационной станции, заключающийся в том, что с помощью когерентно-импульсной радиолокационной станции излучают в направлении воздушного объекта сверхвысокочастотные импульсные сигналы, период повторения излучаемых импульсных сигналов Ти когерентно-импульсной радиолокационной станции выбирают не более 1 мс, принимают отраженные от воздушного объекта сигналы, в процессе приема отраженных сигналов проводят регистрацию, перевод в цифровую форму и запись в оперативное запоминающее устройство значений амплитуды и точного времени приема каждого отраженного импульсного сигнала на избыточном длительном порядка 10 с интервале Δtизб, автоматически сопровождают воздушный объект по дальности и угловым координатам, определяют дальность R1, угол места ε1 и азимут β1 воздушного объекта в начальный момент сопровождения, определяют дальность R2, угол места ε2 и азимут β2 воздушного объекта через интервал ΔТ=1 с, пересчитывают измеренные сферические координаты воздушного объекта для двух указанных моментов времени в прямоугольные (x1,y1,z1) и (x2,y2,z2), определяют пройденный воздушным объектом путь ΔR за время ΔТ по формуле

рассчитывают величину угла между начальным и конечным положениями линии визирования объекта по формуле
рассчитывают скорость воздушного объекта V по формуле V=ΔR/ΔT, выбирают величину необходимого линейного разрешения δR⊥ в поперечном относительно линии визирования объекта направлении, исходя из чего рассчитывают длительность интервала инверсного синтезирования апертуры ΔТис по формуле

где λ - длина волны; γ - угол между линией визирования объекта в начальный момент времени и линией пути объекта, принимают величину угловой скорости поворота воздушного объекта ξ на интервале инверсного синтезирования апертуры равной ξ=Vsinγ/R1, формируют из значений амплитуд и времен приема отраженных импульсных сигналов двумерный массив M1 из S столбцов, в каждый s-й столбец которого записывают информацию об амплитуде и времени приема s-го сигнала из S сигналов, принятых за интервал Δtизб, вектор элементов строки массива M1 с величинами амплитуд отраженных сигналов принимают за отражательную характеристику воздушного объекта, устраняют методом скользящего усреднения высокочастотную турбовинтовую модуляцию отражательной характеристики воздушного объекта, в результате получают планерную отражательную характеристику воздушного объекта, заменяют значения отражательной характеристики воздушного объекта в массиве M1 соответствующими значениями планерной отражательной характеристики воздушного объекта, задают величину оценочного времени корреляции τоц=3 мс, вычисляют значение q=G(τоц/Tи), где G(τоц/Ти) - функция нахождения целой части числа τоц/Ти, определяют число элементов I частной выборки отраженных сигналов, выполняя условие, чтобы I входило в диапазон от 50 до 200, последовательно смещают частную выборку сигналов на один отсчет в пределах планерной отражательной характеристики воздушного объекта, для каждого k-го положения частной выборки рассчитывают величину оценочного коэффициента автокорреляции по формуле
где x(i) - величина 1-го элемента частной выборки в соответствующем k-ом положении, состоящей из I элементов, mx - математическое ожидание амплитуды принимаемого сигнала в пределах планерной отражательной характеристики воздушного объекта, связывают рассчитанный на k-ом шаге коэффициент автокорреляции с временем начала соответствующей частной выборки, составляют из рассчитанных коэффициентов автокорреляции и соответствующих им времен двумерный массив М2, в первой строке которого располагают с первого по К-й коэффициенты автокорреляции, принимают вектор элементов этой строки за корреляционную характеристику объекта, сглаживают корреляционную характеристику объекта методом скользящего усреднения, в результате получают сглаженную корреляционную характеристику объекта, заменяют значения корреляционной характеристики объекта массива М2 соответствующими значениями сглаженной корреляционной характеристики объекта, находят в пределах этой сглаженной корреляционной характеристики объекта точки экстремумов, выбирают из них два смежных экстремума, находят их среднее арифметическое Z, определяют на интервале между используемыми экстремумами m-й элемент первой строки массива М2, наиболее близкий по значению сглаженного коэффициента автокорреляции к рассчитанной величине Z, принимают соответствующее ему m-е значение времени приема сигнала за середину интервала инверсного синтезирования апертуры tc, определяют время tн начала интервала инверсного синтезирования апертуры ΔТис по формуле tн=tc-ΔTиc/2, отличающийся тем, что предварительно для используемой когерентно-импульсной радиолокационной станции методом натурного эксперимента с привлечением реальных воздушных объектов различного размера формируют зависимости коэффициентов прореживания kпр планерной отражательной характеристики воздушного объекта от числа лепестков на пятисекундном интервале планерной отражательной характеристики воздушного объекта, выполняя условие, чтобы глубина модуляции формируемой сглаженной корреляционной характеристики объекта при использовании kпр была не менее 0,3, а также тем, что после запоминания в массиве M1 значений реальной планерной отражательной характеристики воздушного объекта подсчитывают в ней число лепестков, равное числу локальных максимумов, делят это число на два, округляют результат деления до целого значения, по полученному округленному результату с помощью сформированной ранее зависимости kпр от числа лепестков планерной отражательной характеристики воздушного объекта выбирают необходимый в данном конкретном случае коэффициент прореживания kпр и используют его для формирования частных выборок отраженных сигналов, применяя при этом следующее правило: каждый i-й член очередной формируемой частной выборки представляется членом планерной отражательной характеристики объекта, номер которого определяется по формуле (ikпр-kпр+1), причем первым элементом частной выборки в k-ом положении считают k-й элемент планерной отражательной характеристики воздушного объекта, в случае же, если число лепестков планерной отражательной характеристики объекта на пятисекундном интервале не превышает двадцати, фиксируют отсутствие поворота воздушного объекта относительно радиолокационной станции и невозможность применения метода инверсного синтезирования апертуры.
| СПОСОБ ВЫБОРА ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ С РАССЧИТЫВАЕМОЙ УГЛОВОЙ СКОРОСТЬЮ ПОВОРОТА ЦЕЛИ ОТНОСИТЕЛЬНО РАДИОЛОКАТОРА | 2007 |
|
RU2360267C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ПО ТРАЕКТОРНЫМ НЕСТАБИЛЬНОСТЯМ ЕЕ ПОЛЕТА | 2000 |
|
RU2180445C2 |
| US 4855747 A, 08.08.1989 | |||
| US 2005062639 Al, 24.03.2005. | |||

