Изобретение относится к радиолокационным методам и предназначено для извлечения из доплеровских портретов (ДпП) воздушных объектов (ВО) признаков идентификации, а именно частоты и амплитуды спектральных откликов, соответствующих рассеивающим центрам (РЦ) поверхности ВО.
В настоящее время использование векторных признаков классификации и идентификации объектов в виде портретов и индикатрис является общепринятым. Оно описано, например, в [1-8]. Однако признаки отождествления объектов, формируемые, как правило, методом физического или математического моделирования, получают обычными спектральными или корреляционными методами. Получаемые признаки не оптимизируются в интересах повышения их информативности, что снижает потенциальное качество классификации объектов. Для формирования векторных признаков, классификация объектов по которым не будет приводить к дополнительным ошибкам, необходим поиск новых путей, подходы к некоторым из которых описаны в [5-8].
На сегодняшний день известен способ извлечения из ДпП ВО признаков идентификации, реализуемый с соблюдением принципов электродинамического масштабного моделирования в безэховой камере [1, 2, 9-16].
Способ заключается в том, что исследуемый объект изготавливают в уменьшенном размере, причем коэффициент масштабирования выбирают таким, чтобы модель объекта позволяла поместить ее в безэховую камеру и закрепить на поворотном устройстве. Длину волны передающего радиолокационного устройства выбирают из условия выполнения требований электродинамического подобия по формуле

где λрлс - длина волны реальной радиолокационной станции (РЛС), в интересах которой проводятся исследования [16]; Lмод - размер модели объекта; Lоб - размер реального объекта; Kмод=Lоб/Lмод _ коэффициент или масштаб моделирования.
Модель объекта изготавливают из материала, отражающие свойства которого соответствуют отражающим свойствам реального объекта. Модель объекта помещают на поворотную радиопоглощающую или радиопрозрачную платформу. Излучают в направлении масштабной модели объекта радиолокационные сигналы и принимают с помощью радиоприемной системы, расположенной внутри безэховой камеры, отраженные моделью объекта сигналы. Проводят согласованную корреляционно-фильтровую обработку принятых сигналов от масштабной модели, объекта, усиливают их, разделяют на фазовом детекторе на квадратурные (синусную и косинусную) составляющие. С квадратурными составляющими, соответствующими изменению азимутального положения масштабной модели объекта на единицы градусов, проводят операцию дискретного преобразования Фурье (ПФ) для получения ДпП масштабной модели объекта. Из структуры ДпП извлекают признаки идентификации, а именно частоты и амплитуды спектральных откликов в точках достижения амплитудами ДпП максимумов.
Однако этот способ не может использоваться для работы по реальным летательным аппаратам, так как рассчитан на постоянную угловую скорость изменения ракурса ВО, что в реальных условиях выполняется крайне редко. К тому же формируемые таким способом ДпП не в полной мере соответствуют реальным, так как полную адекватность модели обеспечить затруднительно. И наконец, в реальных условиях угол места ВО не является нулевым и даже изменяется в процессе накопления отраженных сигналов, а в безэховой камере он неизменен, что ведет к различиям получаемых ДпП.
Известен способ извлечения из ДпП ВО признаков идентификации в условиях излучения радиолокационных сигналов в свободном пространстве при использовании масштабной модели объекта [17]. Способ заключается в том, что масштабную модель объекта с коэффициентом масштабирования не более нескольких единиц вместе с опорно-поворотным устройством (ОПУ) подвешивают с помощью тросов и растяжек в свободном пространстве на высоте нескольких десятков метров над землей. Тросы из радиопрозрачного материала, удерживающие масштабную модель объекта с ОПУ, закрепляют на вышках, находящихся на расстоянии, при котором эти вышки выходят за пределы характеристики направленности антенны приемо-передающей РЛС. В качестве экспериментальной РЛС используют типовую РЛС с импульсным зондированием и развязкой передающего и приемного устройства или РЛС с отдельным передающим и отдельно расположенным приемным устройством. Для вращения масштабной модели объекта используют ОПУ с понижающим угловую скорость редуктором. Излучают в направлении масштабной модели объекта зондирующие сигналы (ЗС) и принимают отраженные от нее сигналы, усиливают их и компенсируют специальным методом паразитные отражения от местных предметов, ОПУ и вышек. После записи параметров отраженных сигналов для всех азимутальных положений масштабной модели объекта, опираясь на данные о временах приема отраженных сигналов, выделяют из общего генерального массива данных об отраженных сигналах частные выборки (ЧВ) данных об амплитудах и фазах сигналов, полученных на выбранных или заданных заблаговременно интервалах инверсного синтезирования (ИИС). Проводят с массивом комплексных амплитудно-фазовых отсчетов каждой ЧВ операцию дискретного ПФ [18, 19], в результате для каждого ИИС (для каждой ЧВ) формируют спектральный комплексный массив отсчетов, огибающую которого считают ДпП масштабной модели объекта, соответствующим по времени середине этого ИИС, т.е. времени приема отраженного сигнала, записанного в середине используемой ЧВ [20, 21]. Из структуры сформированного ДпП извлекают такие признаки идентификации, как частоты и амплитуды спектральных откликов.
Данный способ также является исследовательским и для работы по реальным объектам эффективно применяться не может, так как не оснащен адаптивными алгоритмами обработки в условиях нелинейного изменения ракурса локации.
Известен на практике еще один способ извлечения из ДпП ВО признаков идентификации [22]. Способ заключается в том, что в направлении реального объекта с помощью реальной РЛС с диапазоном волн от единиц до десятков сантиметров излучают сверхвысокочастотные импульсные сигналы одинаковой частоты, принимают отраженные объектом сигналы, усиливают эти сигналы на высокой частоте. Затем проводят их частотную фильтрацию, переводят их на промежуточную частоту, проводят основное усиление на промежуточной частоте, проводят в пределах периода повторения импульсов согласованную обработку принятых сигналов сверткой с ЗС для выделения пиков их откликов, в точках пиков откликов отраженных сигналов фиксируют их амплитуду, фазу и точное время приема, записывают эти параметры для всех по очереди периодов повторения на магнитный носитель в виде генерального массива данных, содержащего амплитуды, фазы и времена приема сигналов, выбирают величину ИИС Тс на основе необходимого спектрального разрешения по формуле  , где
, где  - необходимая разрешающая способность в частотной области, выделяют из данных об амплитудах, фазах и временах приема частную выборку, соответствующую исследуемому ИИС. Переводят амплитуду As и фазу φs каждого s-го отсчета с помощью аналого-цифрового преобразователя (АЦП) в цифровой вид и далее - в комплексную форму вида Asexp(jφS), где As и φs - соответственно амплитуда и фаза пика отклика s-го отраженного сигнала. Далее проводят с данными частной выборки комплексных отражений от объекта операцию дискретного преобразования Фурье и формируют в результате спектральный массив, выражающий своей огибающей ДпП объекта. Из структуры сформированного ДпП извлекают признаки идентификации, а именно частоты и амплитуды спектральных откликов.
- необходимая разрешающая способность в частотной области, выделяют из данных об амплитудах, фазах и временах приема частную выборку, соответствующую исследуемому ИИС. Переводят амплитуду As и фазу φs каждого s-го отсчета с помощью аналого-цифрового преобразователя (АЦП) в цифровой вид и далее - в комплексную форму вида Asexp(jφS), где As и φs - соответственно амплитуда и фаза пика отклика s-го отраженного сигнала. Далее проводят с данными частной выборки комплексных отражений от объекта операцию дискретного преобразования Фурье и формируют в результате спектральный массив, выражающий своей огибающей ДпП объекта. Из структуры сформированного ДпП извлекают признаки идентификации, а именно частоты и амплитуды спектральных откликов.
Данный способ опирается на применение реальных ВО, использует реальные ЗС на реальных радиолокационных дальностях. Однако даже он имеет недостаток, состоящий в том, что ДпП формируется неадаптивно, в предположении постоянства угловой скорости поворота ВО, что приводит к снижению информативности признаков из структуры ДпП, то есть к снижению его пригодности для практических задач идентификации.
Наиболее близким техническим решением является способ извлечения из ДпП ВО признаков идентификации, описанный в [23]. Для построения ДпП согласно этому способу использовалась пачка отраженных сигналов длительностью 0,5 с. Это обеспечивало, с одной стороны, разрешающую способность по частоте не хуже 2 Гц, а с другой стороны, из-за проявления дестабилизирующих факторов, приводило к незначительному искажению структуры ДпП.
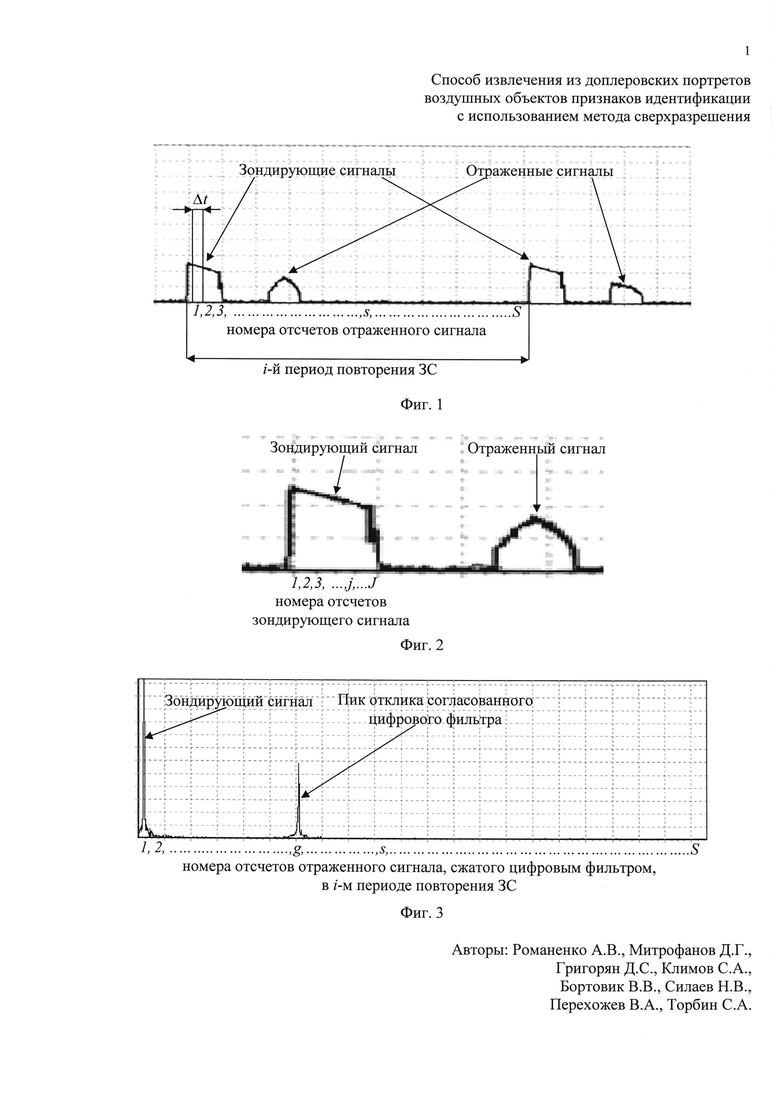
Способ заключается в том, что в направлении реального ВО излучают ЗС одинаковой частоты и последовательно принимают отраженные от него сигналы. После обнаружения традиционным радиолокационным способом ВО переводят РЛС в режим автоматического сопровождения и сопровождают ВО по угловым координатам и дальности, а после определения дальности D до ВО [24] дискретизируют с помощью АЦП и записывают в память ЭВМ амплитуду As и фазу φs принятых сигналов и просочившихся в приемный тракт излученных сигналов каждого i-го периода повторения с периодом дискретизации Δt, получая в каждом периоде повторения S дискретных отсчетов (фиг. 1). При этом в пределах длительности ЗС для каждого периода повторения будет укладываться J дискретных отсчетов (фиг. 2). После этого с преобразованными сигналами проводят цифровую согласованную фильтрацию в каждом i-м периоде повторения, то есть проводят свертку принятых (отраженных от ВО) сигналов определенных периодов зондирования с оцифрованными комплексно-сопряженными ЗС этих же периодов зондирования для получения откликов согласованного цифрового фильтра (фиг. 3). Алгоритм цифровой согласованной фильтрации аналитически выражается следующим образом

где i=1…I; s=1…(S-J);  - комплексные значения, получаемые после сжатия отраженного сигнала цифровым фильтром, соответствующие s-му отсчету отраженного сигнала в i-м периоде повторения;
- комплексные значения, получаемые после сжатия отраженного сигнала цифровым фильтром, соответствующие s-му отсчету отраженного сигнала в i-м периоде повторения;  ,
,  - значения амплитуды и фазы отраженного сигнала, соответствующие (s+j-1)-му отсчету продискретизированного отраженного сигнала в i-м периоде повторения импульсов;
- значения амплитуды и фазы отраженного сигнала, соответствующие (s+j-1)-му отсчету продискретизированного отраженного сигнала в i-м периоде повторения импульсов;  ,
,  - значения амплитуды и фазы излученного сигнала, соответствующие j-му отсчету продискретизированного ЗС в i-м периоде повторения импульсов; I - количество периодов повторения ЗС, укладывающееся на интервале регистрации данных.
- значения амплитуды и фазы излученного сигнала, соответствующие j-му отсчету продискретизированного ЗС в i-м периоде повторения импульсов; I - количество периодов повторения ЗС, укладывающееся на интервале регистрации данных.
После этого рассчитывают время прохождения излученного сигнала τво до ВО и обратно по формуле

где  - скорость распространения электромагнитных волн.
- скорость распространения электромагнитных волн.
Затем определяют предполагаемый номер отсчета g, на который при дальности D будет приходиться пик отраженного от ВО сигнала, по формуле

где round - операция округления значения до следующего целого числа.
После этого в памяти электронно-вычислительной машины (ЭВМ) РЛС формируют массив отражений Hg (фиг. 4), в первую строку которого записывают номера используемых при анализе отражений i-x периодов повторения, во вторую - амплитуды  g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженного от ВО сигнала в i-x периодах повторения, в третью - фазы
g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженного от ВО сигнала в i-x периодах повторения, в третью - фазы  g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженных сигналов в i-x периодах повторения, в четвертую - моменты времени ti=[(i-1)S+g+round(J/2)]Δt, соответствующие амплитудам и фазам сжатых отраженных от ВО сигналов в i-x периодах повторения. Дополнительные round(J/2) отсчета, учитываемые при расчете i-x моментов времени ti, обусловлены тем, что пик отклика в каждом периоде повторения приходится на середину длительности принимаемого отраженного от ВО сигнала.
g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженных сигналов в i-x периодах повторения, в четвертую - моменты времени ti=[(i-1)S+g+round(J/2)]Δt, соответствующие амплитудам и фазам сжатых отраженных от ВО сигналов в i-x периодах повторения. Дополнительные round(J/2) отсчета, учитываемые при расчете i-x моментов времени ti, обусловлены тем, что пик отклика в каждом периоде повторения приходится на середину длительности принимаемого отраженного от ВО сигнала.
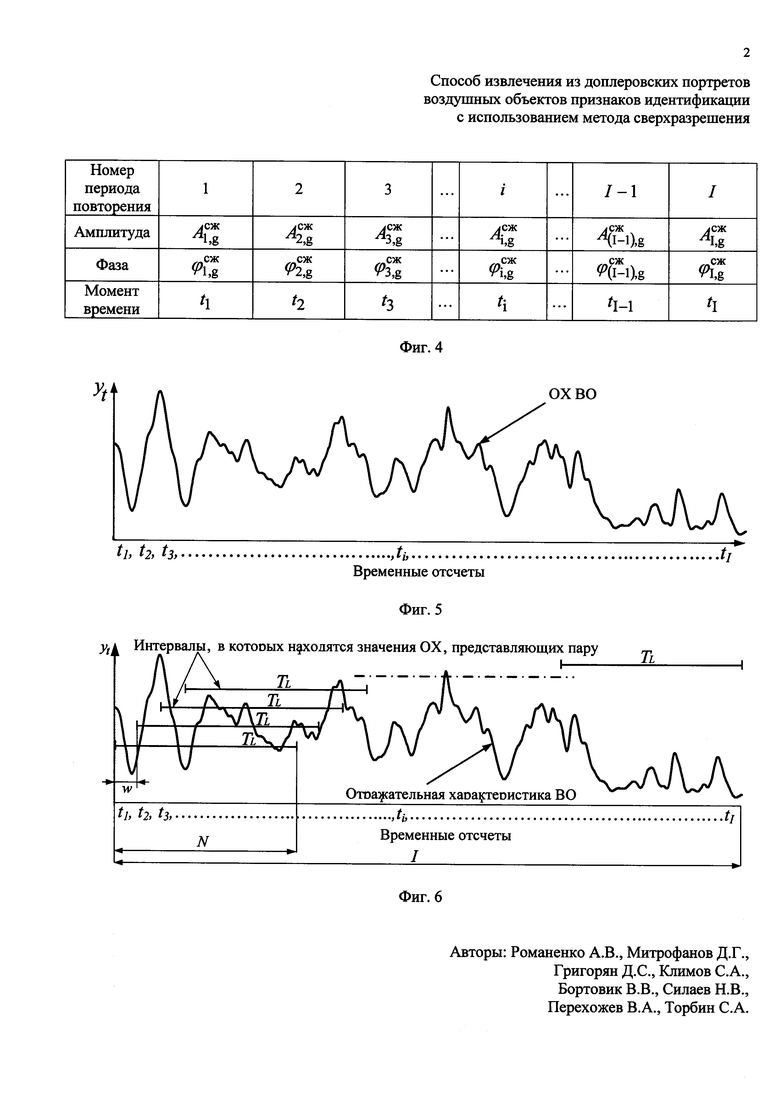
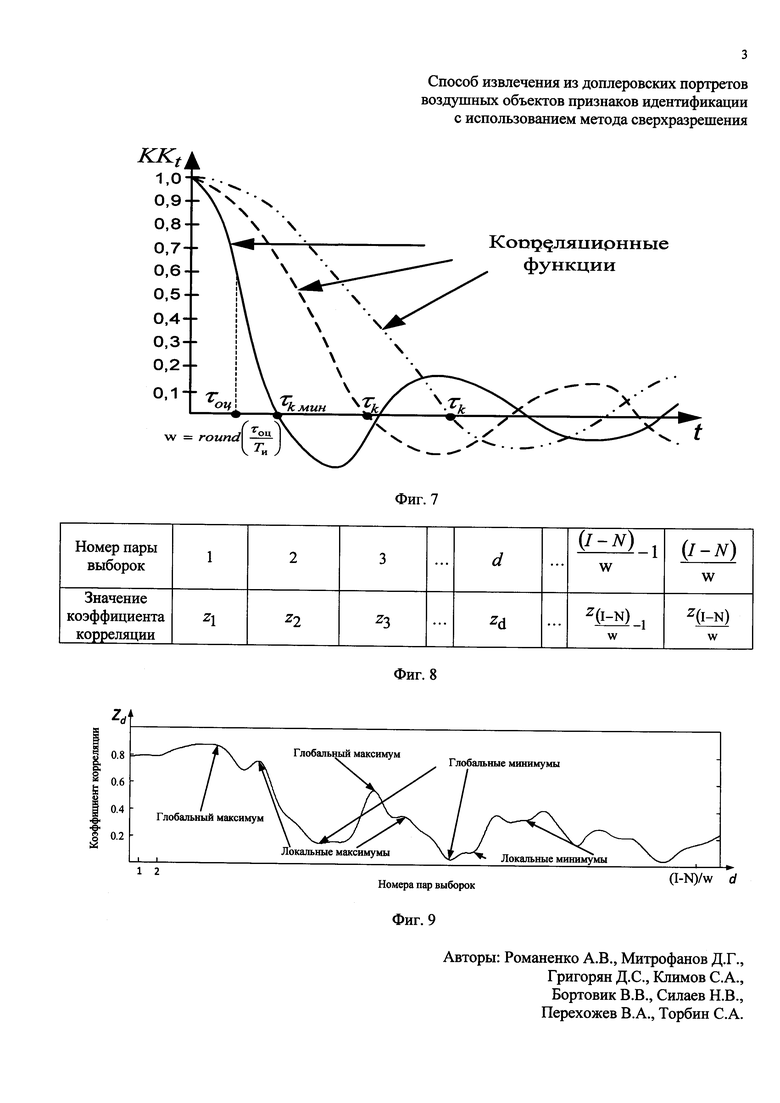
Из амплитудных значений массива Hg формируют зависимость, которая графически представляет собой амплитудную отражательную характеристику (ОХ) ВО (фиг. 5). После этого из созданной зависимости, начиная с первого отсчета, последовательно извлекают выборки длительностью ТL=0,5 с каждая, смещенные друг относительно друга на один отсчет (фиг. 6). Каждая выборка содержит N=round(TL/Tи) дискретных отсчетов, где Tи - период повторения импульсов. Для каждой выборки формируют автокорреляционную функцию [25, 26] (фиг. 7) и определяют величину интервала корреляции τк (момент времени, когда автокорреляционная функция первый раз становится равной нулю). Затем выбирают минимальную среди всех интервалов корреляции τк величину τк мин, определяют оценочное время корреляции τоц, равное величине порядка 0,5 τк мин. Начиная с первого отсчета (элемента), последовательно выделяют из массива Hg смещенные друг относительно друга на w=round(τоц/Ти) отсчетов d-e пары смежных выборок, учитывая, что d=1…round[(I-N)/w] (фиг. 7).
После этого с помощью амплитуд выделяемых d-x пар выборок рассчитывают коэффициенты корреляции zd по формуле [26]

где yn+(d-1)w, yn+dw - амплитудные значения, соответствующие [n+(d-1)w]-му дискретному отсчету первой выборки и [n+dw]-му отсчету второй выборки в d-й паре соответственно; m1,d, m2,d - математические ожидания [26] амплитудных значений ОХ в первой (индекс 1) и во второй (индекс 2) выборках d-й пары соответственно; σ1,d, σ2,d - среднеквадратические отклонения амплитудных значений в первой и во второй выборках d-й пары соответственно.
Затем в памяти ЭВМ РЛС формируют массив Hz, в первую строку которого записывают номера пар выборок d, во вторую - соответствующие им коэффициенты корреляции zd (фиг. 8). Из значений коэффициентов корреляции zd массива Hz формируют зависимость, которая графически представляет собой корреляционную характеристику (КХ) ВО (фиг. 9). В сформированной КХ каждой d-й паре смежных выборок ОХ соответствует один d-й коэффициент корреляции zd.
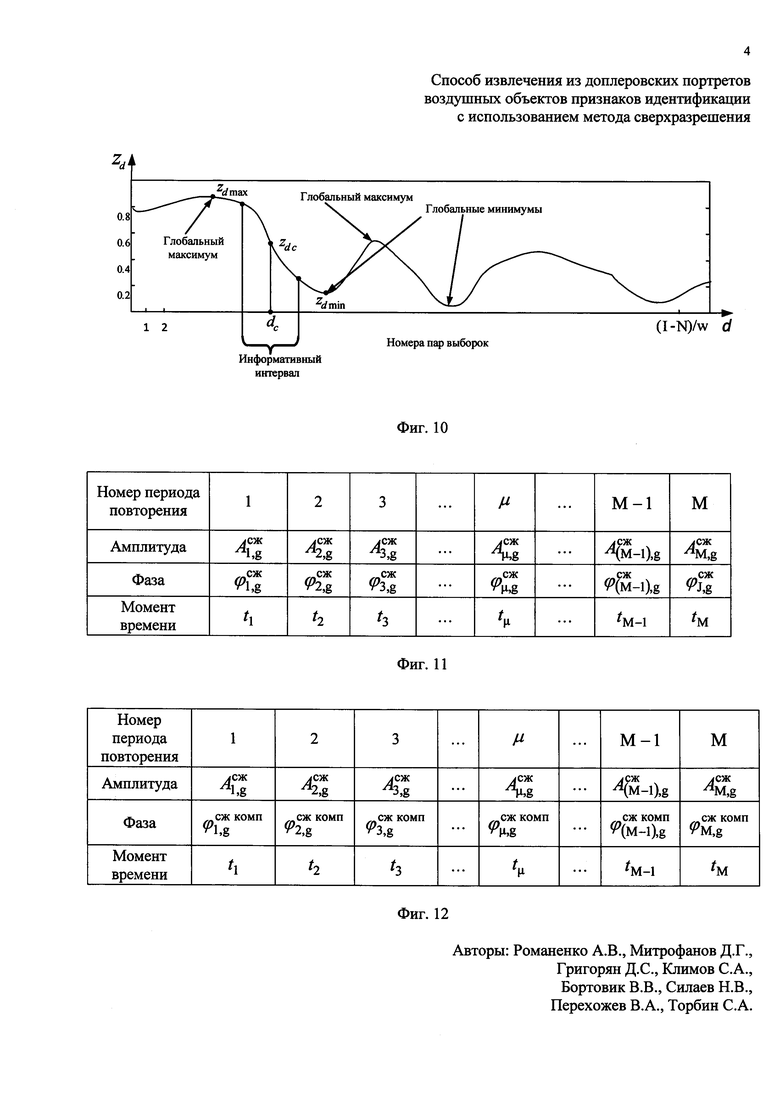
Со сформированной КХ проводят сглаживание цифровым образом методом наименьших квадратов [27], то есть устраняют локальные максимумы и минимумы, оставляя только глобальные (фиг. 10). В сглаженной КХ определяют такой ее участок между соседними глобальными максимумом и минимумом, на котором максимальное zd max и минимальное zd min значения коэффициента корреляции имеют наибольшее отличие (фиг. 10). На этом участке находят точку со значением коэффициента корреляции zd с, которое наиболее точно соответствует величине [(zd max-zd min)/2] (фиг. 10). Затем используют эту точку как середину информативного интервала длительностью Тии=0,5 с. По номеру zd c пары выборок ОХ определяют соответствующий этой паре [round{(dc-1)w+[(N+w)/2]}]-й номер периода повторения в ОХ, где dc - номер пары выборки, соответствующий середине информативного интервала. Находят номера отсчетов в ОХ, которые по времени сдвинуты относительно середины информативного интервала на 0,25 с по формулам


где iн - номер отсчета ОХ массива Hg, соответствующий началу информативного интервала; iк - номер отсчета ОХ массива Hg, соответствующий концу информативного интервала.
Найденный информативный участок (интервал) КХ соответствует средней угловой скорости изменения ракурса локации ВО, обусловленной только перемещением центра масс ВО по траектории. На данном информативном интервале структура ДпП ВО не будет претерпевать существенных изменений из-за влияния траекторных нестабильностей, что будет способствовать сохранению идентификационных возможностей ДпП [23].
Затем в памяти ЭВМ РЛС создают массив Ни (фиг. 11), в первую строку которого записывают µ-e номера периодов повторения с 1 по М-й, причем M=round(0,5/Tи), а µ-й номер в пределах массива Ни соответствует (iн+µ-1)-му номеру в исходной ОХ, во вторую - амплитуды  µ-х отсчетов ОХ, принадлежащих информативному интервалу, в третью - фазы
µ-х отсчетов ОХ, принадлежащих информативному интервалу, в третью - фазы  µ-x отсчетов ОХ, принадлежащих информативному интервалу, в четвертую - моменты времени tµ=(iн+µ-1)Ти, соответствующие амплитудам и фазам отраженных сигналов в µ-x периодах повторения, имеющих такую нумерацию в пределах ИИС). Первый элемент массива Ни соответствует началу информативного интервала, то есть i-му элементу массива Hg а последний элемент массива Hи соответствует концу информативного интервала, то есть iк-му элементу массива Hg.
µ-x отсчетов ОХ, принадлежащих информативному интервалу, в четвертую - моменты времени tµ=(iн+µ-1)Ти, соответствующие амплитудам и фазам отраженных сигналов в µ-x периодах повторения, имеющих такую нумерацию в пределах ИИС). Первый элемент массива Ни соответствует началу информативного интервала, то есть i-му элементу массива Hg а последний элемент массива Hи соответствует концу информативного интервала, то есть iк-му элементу массива Hg.
После этого проводят операцию дискретного преобразования Фурье с комплексными значениями  выборки, состоящей из 8 первых отсчетов массива Ни. В результате получают начальный низкоинформативный доплеровский спектр (НДС). В полученном начальном НДС определяют частоту Доплера
выборки, состоящей из 8 первых отсчетов массива Ни. В результате получают начальный низкоинформативный доплеровский спектр (НДС). В полученном начальном НДС определяют частоту Доплера  , которая соответствует максимальной по амплитуде составляющей спектра.
, которая соответствует максимальной по амплитуде составляющей спектра.
Затем определяют радиальную скорость ВО в начале информативного интервала  по формуле
по формуле

где λ - длина волны излучаемого сигнала.
После этого проводят операцию дискретного преобразования Фурье с комплексными значениями выборки, состоящей из 8 последних отсчетов массива Ни. В результате получают конечный НДС. В полученном конечном НДС определяют частоту Доплера  , которая соответствует максимальной по амплитуде составляющей спектра.
, которая соответствует максимальной по амплитуде составляющей спектра.
Затем определяют радиальную скорость ВО в конце информативного интервала  по формуле
по формуле

После этого определяют среднюю радиальную скорость  ВО в пределах информативного ИИС по формуле
ВО в пределах информативного ИИС по формуле

Затем определяют радиальное ускорение a r ВО на выбранном информативном интервале по формуле

Далее на основе рассчитанных значений средней радиальной скорости  и ускорения a
r рассчитывают величину компенсируемой фазы для каждого tµ-го момента времени по формуле
и ускорения a
r рассчитывают величину компенсируемой фазы для каждого tµ-го момента времени по формуле

После этого проводят компенсацию фазового влияния радиального движения ВО на выбранном информативном интервале путем изменения фазы  каждого µ-го элемента массива Ни на величину
каждого µ-го элемента массива Ни на величину  по формуле
по формуле

где знак «-» соответствует движению ВО в направлении РЛС (приближению), а знак «+» соответствует удалению ВО.
Затем в памяти ЭВМ РЛС создают массив Нс (фиг. 12), в первую строку которого записывают номера периодов повторения с 1 по М-й, во вторую - амплитуды  отсчетов ОХ, принадлежащих информативному интервалу, в третью - скомпенсированные фазы
отсчетов ОХ, принадлежащих информативному интервалу, в третью - скомпенсированные фазы  g-x отсчетов ОХ, принадлежащих информативному интервалу, в четвертую - моменты времени tµ, соответствующие амплитудам и фазам отраженных сигналов в µ-х периодах повторения.
g-x отсчетов ОХ, принадлежащих информативному интервалу, в четвертую - моменты времени tµ, соответствующие амплитудам и фазам отраженных сигналов в µ-х периодах повторения.
С использованием данных массива Нс формируют ДпП ВО в выбранном информативном интервале путем проведения операции дискретного преобразования Фурье с комплексными амплитудно-фазовыми значениями  по формуле
по формуле

где k=1…М;  - комплексное амплитудно-фазовое значение спектра, соответствующее k-му отсчету;
- комплексное амплитудно-фазовое значение спектра, соответствующее k-му отсчету;  - комплексное амплитудно-фазовое значение массива, соответствующее µ-му отсчету.
- комплексное амплитудно-фазовое значение массива, соответствующее µ-му отсчету.
Анализируют полученный ДпП и извлекают из его структуры признаки идентификации, а именно частоты и амплитуды локальных спектральных составляющих (откликов). При идентификации предполагают использовать число спектральных составляющих в ДпП ВО, их взаимное частотное расположение и соотношение амплитуд составляющих.
Согласно теоретическим положениям структура ДпП должна определяться размерами объекта, величиной интервала инверсного синтезирования (ИИС) и угловой скоростью поворота объекта  [23, 28]. С одной стороны, для улучшения разрешающей способности требуется увеличивать время Tии. Однако при увеличении времени инверсного синтезирования (информативного интервала) Тии в его пределы могут войти отсчеты ОХ, которым соответствуют экстремумы ее КХ, а они, в свою очередь, являются моментами начала или конца интервала интенсивного влияния траекторных нестабильностей (а именно, рысканий ВО по курсу, крену и тангажу, вызванных его движением в турбулентной атмосфере). При этом информативность ДпП ВО будет снижаться, сам портрет будет искажаться, что негативно повлияет на процесс классификации ВО по его структуре. Поэтому целесообразно, чтобы время инверсного синтезирования Tии составляло не более 0,3-0,5 с.Однако ДпП при этом будет слабоинформативным, что негативно повлияет на процесс идентификации или классификации. Таким образом, необходимо, с одной стороны, ограничивать ИИС, а с другой - обеспечить максимально возможное разрешение по частоте. Это противоречие может быть разрешено с привлечением так называемых методов сверхразрешения [29].
[23, 28]. С одной стороны, для улучшения разрешающей способности требуется увеличивать время Tии. Однако при увеличении времени инверсного синтезирования (информативного интервала) Тии в его пределы могут войти отсчеты ОХ, которым соответствуют экстремумы ее КХ, а они, в свою очередь, являются моментами начала или конца интервала интенсивного влияния траекторных нестабильностей (а именно, рысканий ВО по курсу, крену и тангажу, вызванных его движением в турбулентной атмосфере). При этом информативность ДпП ВО будет снижаться, сам портрет будет искажаться, что негативно повлияет на процесс классификации ВО по его структуре. Поэтому целесообразно, чтобы время инверсного синтезирования Tии составляло не более 0,3-0,5 с.Однако ДпП при этом будет слабоинформативным, что негативно повлияет на процесс идентификации или классификации. Таким образом, необходимо, с одной стороны, ограничивать ИИС, а с другой - обеспечить максимально возможное разрешение по частоте. Это противоречие может быть разрешено с привлечением так называемых методов сверхразрешения [29].
Задачей изобретения является разработка способа извлечения из ДпП ВО признаков идентификации, при котором за счет использования метода сверхразрешения при ограниченном времени инверсного синтезирования (менее 0,5 с) обеспечивается высокая разрешающая способность по частоте, способствующая повышению информативности признаков идентификации, заключенных в структуре ДпП.
Для решения задачи изобретения предлагается провести методом линейного предсказания проверку структуры ДпП ВО на возможное наличие в ней дополнительных спектральных составляющих, соответствующих РЦ на освещенной поверхности ВО, которые при проведении стандартной операции дискретного преобразования Фурье с комплексными значениями ОХ ВО по причине низкой разрешающей способности выявлены не были. В получаемом способом-прототипом ДпП ВО несколько соседних истинных спектральных откликов от РЦ могли «объединяться» в один отклик, что усложняло последующий процесс идентификации.
Способ извлечения из ДпП ВО признаков идентификации с использованием метода сверхразрешения заключается в том, что в направлении ВО с помощью реальной РЛС сопровождения излучают сверхвысокочастотные импульсные сигналы одинаковой частоты, а затем принимают отраженные ВО сигналы. После обнаружения ВО переводят РЛС в режим автоматического сопровождения по угловым координатам и дальности. Определяют дальность D до ВО, после чего дискретизируют с помощью АЦП с периодом дискретизации Δt и записывают в память ЭВМ амплитуду As и фазу φs отраженных сигналов, а также просочившихся в приемный тракт излученных сигналов каждого i-го периода повторения, получая при этом в каждом периоде повторения S дискретных отсчетов (фиг. 1). При этом в каждом периоде повторения в пределах длительности просочившегося ЗС будет укладываться J дискретных отсчетов (фиг. 2). После оцифровки отраженных сигналов с ними проводят цифровую согласованную фильтрацию в каждом i-м периоде повторения для получения откликов согласованного цифрового фильтра (фиг. 3), то есть проводят свертку принятых отраженных от ВО сигналов с оцифрованными комплексно-сопряженными ЗС в одних и тех же периодах повторения по формуле (2).
После этого по формуле (3) рассчитывают время прохождения излученного сигнала τво до ВО и обратно. Затем по формуле (4) определяют предполагаемый номер отсчета g, на который при дальности D будет приходиться пик отраженного от ВО сигнала.
После этого в памяти ЭВМ РЛС формируют массив отражений Hg (фиг. 4). В первую строку этого массива записывают номера используемых при анализе отражении i-х периодов повторения, во вторую - амплитуды  g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженного от ВО сигнала, в i-х периодах повторения, в третью - фазы
g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженного от ВО сигнала, в i-х периодах повторения, в третью - фазы  g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженных сигналов в i-х периодах повторения, в четвертую - моменты времени ti=[(i-1)S+g+round(J/2)]Δt, соответствующие амплитудам
g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженных сигналов в i-х периодах повторения, в четвертую - моменты времени ti=[(i-1)S+g+round(J/2)]Δt, соответствующие амплитудам  и фазам
и фазам  g сжатых отраженных сигналов от ВО в i-х периодах повторения.
g сжатых отраженных сигналов от ВО в i-х периодах повторения.
Из амплитудных значений массива Hg формируют зависимость, которая графически представляет собой амплитудную ОХ ВО (фиг. 5). После этого, начиная с первого отсчета, из созданной зависимости последовательно извлекают выборки длительностью TL=0,5 с каждая, смещенные друг относительно друга на один отсчет (фиг. 6). Каждая выборка содержит N=round (TL/Tи) дискретных отсчетов. Для каждой выборки формируют автокорреляционную функцию (фиг. 7) и определяют величину интервала корреляции τk (момент времени, когда автокорреляционная функция первый раз принимает значение, равное нулю). После этого выбирают минимальную среди всех интервалов корреляции τk величину τk мин, определяют оценочное время корреляции τоц, равное величине порядка 0,5τk мин. Начиная с первого отсчета, последовательно выделяют из массива Hg смещенные друг относительно друга на w=round(τоц/Ти) отсчетов d-e пары смежных выборок, учитывая, что d=1…round[(I-N)/w] (фиг. 7).
Затем по формуле (5) с помощью амплитуд выделяемых d-x пар выборок рассчитывают коэффициенты корреляции zd. После этого в памяти ЭВМ РЛС формируют массив Hz. В первую строку этого массива записывают номера пар выборок d, во вторую - соответствующие им коэффициенты корреляции zd (фиг. 8). После этого формируют из значений коэффициентов корреляции zd массива Hz зависимость, которая графически представляет собой КХ ВО (фиг. 9).
Проводят сглаживание сформированной КХ методом наименьших квадратов цифровым образом, то есть устраняют локальные максимумы и минимумы, оставляя только глобальные (фиг. 10). В сглаженной КХ определяют такой ее участок между соседними глобальными максимумом и минимумом, на котором максимальное zd max и минимальное zd min значения коэффициента корреляции имеют наибольшее отличие (фиг. 10). На этом участке находят точку со значением коэффициента корреляции zd c, которое наиболее точно соответствует величине [(zd max-zd min)/2] (фиг. 10). Затем используют эту точку как середину информативного интервала длительностью Tии=0,5 с. По номеру zd c пары выборок ОХ определяют соответствующий ему [round((dc-1)w+[(N+w)/2])]-й номер периода повторения в ОХ. По формулам (6) и (7) находят номера отсчетов в ОХ, которые по времени сдвинуты относительно середины информативного интервала на 0,25 с.
После этого в памяти ЭВМ РЛС создают массив Ни (фиг. 11). В первую строку этого массива записывают µ-e номера периодов повторения с 1 по М-й, причем М=round(0,5/Tи), а µ-й номер в пределах массива Ни соответствует (iн+µ-1)-му номеру в исходной ОХ, во вторую - амплитуды µ-x отсчетов ОХ, принадлежащих информативному интервалу, в третью - фазы µ-x отсчетов ОХ, принадлежащих информативному интервалу, в четвертую - моменты времени tµ=(iн+µ-1)Ти, соответствующие амплитудам и фазам отраженных сигналов в µ-x периодах повторения (в пределах ИИС). Первый элемент массива Hи соответствует началу информативного интервала, то есть iн-му элементу массива Hg, а последний элемент массива Ни соответствует концу информативного интервала, то есть iк-му элементу массива Hg.
Затем с комплексными значениями  выборки, состоящей из 8-ми первых отсчетов массива Ни, проводят операцию дискретного преобразования Фурье, в результате которой получают начальный НДС. В полученном начальном НДС определяют частоту Доплера
выборки, состоящей из 8-ми первых отсчетов массива Ни, проводят операцию дискретного преобразования Фурье, в результате которой получают начальный НДС. В полученном начальном НДС определяют частоту Доплера  , которая соответствует максимальной по амплитуде составляющей спектра.
, которая соответствует максимальной по амплитуде составляющей спектра.
После этого по формуле (8) определяют радиальную скорость ВО в начале информативного интервала  .
.
Затем с комплексными значениями выборки, состоящей из 8-ми последних отсчетов массива Ни, проводят операцию дискретного преобразования Фурье, в результате которой получают конечный НДС. В полученном конечном НДС определяют частоту Доплера  , которая соответствует максимальной по амплитуде составляющей спектра.
, которая соответствует максимальной по амплитуде составляющей спектра.
После этого по формуле (9) определяют радиальную скорость ВО в конце информативного интервала  .
.
Затем по формуле (10) определяют среднюю радиальную скорость  ВО в пределах информативного интервала.
ВО в пределах информативного интервала.
После этого по формуле (11) определяют радиальное ускорение a r ВО на выбранном информативном интервале.
Далее по формуле (12) на основе рассчитанных значений средней радиальной скорости и ускорения a
r рассчитывают величину компенсируемой фазы для каждого tµ-го момента времени.
После этого по формуле (13) проводят компенсацию фазового влияния радиального движения ВО на выбранном информативном интервале путем изменения фазы  каждого µ-го элемента массива Ни на величину
каждого µ-го элемента массива Ни на величину  .
.
Затем в памяти ЭВМ РЛС из элементов массива Ни создают массив Нс с заменой на соответствующие  (фиг. 12). В первую строку этого массива записывают номера периодов повторения с 1-го по М-й, во вторую - амплитуды
(фиг. 12). В первую строку этого массива записывают номера периодов повторения с 1-го по М-й, во вторую - амплитуды  g-x отсчетов ОХ, принадлежащих информативному интервалу, в третью - скомпенсированные фазы
g-x отсчетов ОХ, принадлежащих информативному интервалу, в третью - скомпенсированные фазы  µ-x отсчетов ОХ, принадлежащих информативному интервалу, в четвертую - моменты времени tµ, соответствующие амплитудам и фазам отраженных сигналов в µ-x периодах повторения.
µ-x отсчетов ОХ, принадлежащих информативному интервалу, в четвертую - моменты времени tµ, соответствующие амплитудам и фазам отраженных сигналов в µ-x периодах повторения.
После этого проводят операцию дискретного преобразования Фурье со всеми µ-ми комплексными величинами  , составленными из элементов массива Нс. В результате получают предварительный ДпП, в котором определяют частоту, соответствующую его максимальному амплитудному значению, и используют эту частоту как предварительную оценку частоты
, составленными из элементов массива Нс. В результате получают предварительный ДпП, в котором определяют частоту, соответствующую его максимальному амплитудному значению, и используют эту частоту как предварительную оценку частоты  .
.
Далее определяют предполагаемое число гармоник Р в спектре идентифицируемого ВО [18]. Это число Р выбирают равным максимально возможному числу ярко выраженных РЦ на поверхности ВО в квазиоптической области отражения радиоволн, имеющему для крупноразмерного ВО величину порядка 10, а для среднеразмерного и малоразмерного ВО - не более 5. Для определения наиболее подходящего значения числа гармоник Р целесообразно по причине компромисса между высоким поперечным разрешением и возможным появлением ложных спектральных откликов провести несколько процедур формирования ДпП ВО, используя в каждой из них одно из значений числа гармоник Р, близкого к вышеуказанным.
Затем, начиная с первого элемента массива Нс, последовательно извлекают A=round(3P/2) выборок, состоящих из Q≈trunc(M/A) элементов и смещенных друг относительно друга на Q элементов (на длительность выборки), где trunc - операция округления значения до предыдущего целого числа.
После этого определяют комплексные суммы  Q элементов массива Нс внутри каждой а-й выборки с дополнительным фазированием на частоте , соответствующие а-м частным выборкам, где а=1…А, по формуле
Q элементов массива Нс внутри каждой а-й выборки с дополнительным фазированием на частоте , соответствующие а-м частным выборкам, где а=1…А, по формуле

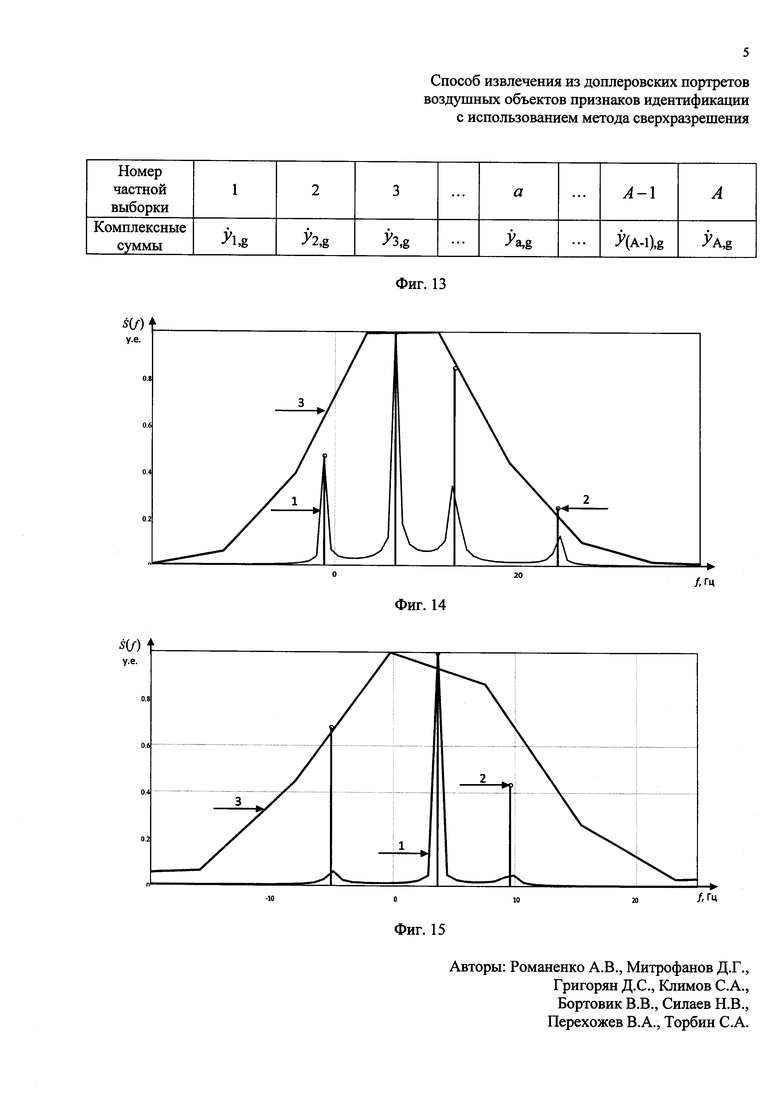
Затем в памяти ЭВМ РЛС создают массив На (фиг. 13). В первую строку этого массива записывают а-е номера выборок с 1-й по А-й, а во вторую -соответствующие комплексные суммы .
После этого для выбранного числа Р, из массива На, состоящего из А комплексных сумм , формируют модифицированным ковариационным методом [29] матрицу данных Up размерностью (Р+1)×[2(А-Р)] по формуле
Для случая, когда, например, Р=5, число комплексных сумм A будет равно А=8, и матрица данных UP примет вид

Затем рассчитывают оценку корреляционной матрицы  размерностью [2(А-Р)]×[2(А-Р)], где
размерностью [2(А-Р)]×[2(А-Р)], где  - эрмитово-сопряженная матрица, соответствующая матрице UP, и составляют систему нормальных уравнений вида
- эрмитово-сопряженная матрица, соответствующая матрице UP, и составляют систему нормальных уравнений вида

где cP - вектор из Р строк и 1-го столбца, включающий Р неизвестных коэффициентов;  - среднее значение квадратов ошибок линейного предсказания вперед и назад порядка Р;
- среднее значение квадратов ошибок линейного предсказания вперед и назад порядка Р;  - комплексное значение первой строки первого столбца матрицы R-1; R-1 - матрица, обратная матрице R; 0P - Р-элементный вектор-столбец, включающий нулевые значения.
- комплексное значение первой строки первого столбца матрицы R-1; R-1 - матрица, обратная матрице R; 0P - Р-элементный вектор-столбец, включающий нулевые значения.
Систему (18) для удобства ее решения относительно неизвестного вектора сР записывают в следующем виде

Решая систему (19) относительно неизвестного вектора сР, получают оценки коэффициентов  вектора сР, которые затем используют для вычисления спектральной функции
вектора сР, которые затем используют для вычисления спектральной функции

где  - текущая частота, соответствующая диапазону частот от -(0,5/Tи) до +(0,5/Tи).
- текущая частота, соответствующая диапазону частот от -(0,5/Tи) до +(0,5/Tи).
Сформированную спектральную функцию  принимают за прототип ДпП ВО, пример которого показан на фиг. 14-16 (выносимая линия 1). Далее подсчитывают число локальных максимумов
принимают за прототип ДпП ВО, пример которого показан на фиг. 14-16 (выносимая линия 1). Далее подсчитывают число локальных максимумов  спектральной функции
спектральной функции  , которое может достигать предполагаемого числа составляющих Р в спектре идентифицируемого ВО, номер локального максимума в спектральной функции обозначают через
, которое может достигать предполагаемого числа составляющих Р в спектре идентифицируемого ВО, номер локального максимума в спектральной функции обозначают через  , соответствующие
, соответствующие  локальным максимумам частоты
локальным максимумам частоты  рассчитывают путем решения с помощью специального программного обеспечения (например, с помощью математического пакета Mathcad [27]) системы из уравнений вида
рассчитывают путем решения с помощью специального программного обеспечения (например, с помощью математического пакета Mathcad [27]) системы из уравнений вида
где  .
.
После этого рассчитывают фазовые множители  каждого а-го элемента массива Hа на частотах
каждого а-го элемента массива Hа на частотах  по формуле
по формуле

Далее формируют матрицу Ga фазовых множителей вида
После этого составляют систему нормальных уравнений вида
где  - неизвестная комплексная амплитуда, соответствующая
- неизвестная комплексная амплитуда, соответствующая  -му номеру локального максимума спектральной функции
-му номеру локального максимума спектральной функции  ;
;  - комплексное значение массива Нa, соответствующее его a-му элементу.
- комплексное значение массива Нa, соответствующее его a-му элементу.
Систему (24) для удобства ее решения относительно неизвестных комплексных амплитуд  записывают в следующем виде
записывают в следующем виде
где  - эрмитово-сопряженная матрица, соответствующая матрице Ga;
- эрмитово-сопряженная матрица, соответствующая матрице Ga;  - матрица, обратная матрице
- матрица, обратная матрице  .
.
Рассчитанные по формуле 25 истинные амплитуды  спектральной функции
спектральной функции  показаны на фиг. 14-16 (выносимая линия 2).
показаны на фиг. 14-16 (выносимая линия 2).
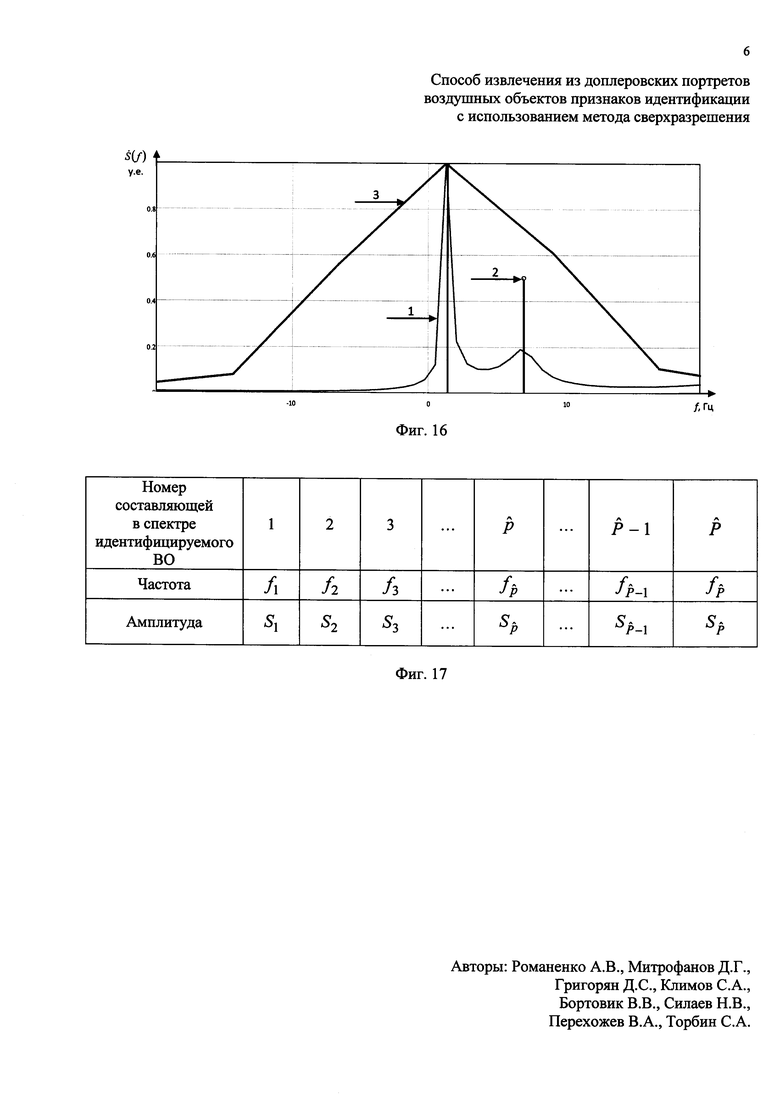
Затем в памяти ЭВМ РЛС создают массив признаков идентификации Hп (фиг. 17). В первую строку этого массива записывают -е номера составляющих в спектре идентифицируемого ВО с 1-го по -й, во вторую - частоты  , соответствующие положению этих составляющих, в третью - амплитуды
, соответствующие положению этих составляющих, в третью - амплитуды  , соответствующие частотам .
, соответствующие частотам .
Полученные в результате проведенных преобразований частотно-амплитудные пары  , соответствующие локальным максимумам спектральной функции
, соответствующие локальным максимумам спектральной функции  , принимают в качестве признаков идентификации ВО.
, принимают в качестве признаков идентификации ВО.
Как следует из выражений (15-25), процедура разрешения сигналов ВО методом квазикогерентного накопления с прореживанием данных предполагает формирование спектральной функции (20) и последующий поиск ее локальных максимумов из выбранного сектора анализа, а именно значений их частот (21) и комплексных амплитуд (25).
Сектор анализа спектральной функции выбирают в области ее однозначности и он примерно равен ширине амплитудно-частотной характеристики фильтра.
Проверку возможности получения вышеуказанного технического результата при осуществлении предлагаемого способа выполняли путем сравнения ДпП ВО, сформированных с применением метода сверхразрешения (фиг. 14-16 (выносимая линия 1)) и без него (фиг. 14-16 (выносимая линия 3)). Сравнение показало, что ДпП, сформированные без применения метода сверхразрешения, обладают недостаточной информативностью. Применение метода сверхразрешения при формировании ДпП ВО позволило повысить поперечное разрешение в портретах, увеличивая в их структуре количество спектральных откликов. Это делает ДпП объектов более информативными, что, в свою очередь, позволяет по их частотной протяженности и количеству спектральных откликов в их структуре определять размеры ВО.
Так, например, ДпП крупноразмерного самолета (фиг. 14) имеет в своей структуре 4 спектральных отклика, его частотная протяженность составляет порядка 25 Гц, ДпП среднеразмерного самолета (фиг. 15) имеет 3 спектральных отклика, его частотная протяженность составляет порядка 15 Гц, а ДпП малоразмерного самолета (фиг. 16) имеет 2 спектральных отклика, его частотная протяженность составляет порядка 5 Гц. Анализ ДпП ВО показал, что структура ДпП зависит от размера ВО, а именно с ростом размера ВО увеличивается число спектральных откликов в структуре ДпП и растет его частотная протяженность, что говорит об увеличении числа РЦ ВО.
При использовании предлагаемого способа в структуре ДпП формируются дополнительные спектральные отклики, соответствующие отраженным сигналам от РЦ ВО, которые при использовании способа [23] не наблюдались. Предлагаемый способ при наличии в структуре ДпП ВО нескольких соседних истинных спектральных откликов исключает возможность их слияния в один отклик. Это может быть воспринято как повышение разрешающей способности по частоте и как повышение информативности ДпП.
Сущность изобретения заключается в том, что структура предварительного ДпП подвергается спектральному анализу авторегрессионным параметрическим методом. Данный метод позволяет определять параметры предполагаемого ДпП (математической модели), отражающего структуру ВО с большей информативностью. Такими параметрами являются амплитуда  и частота
и частота  спектральных составляющих ДпП. Согласно авторегрессионному методу определение параметров математической модели сводится к определению ее коэффициентов
спектральных составляющих ДпП. Согласно авторегрессионному методу определение параметров математической модели сводится к определению ее коэффициентов  заданного порядка Р, соответствующего числу ярко выраженных РЦ на поверхности ВО в квазиоптической области отражения радиоволн, и расчету на их основе спектральной функции
заданного порядка Р, соответствующего числу ярко выраженных РЦ на поверхности ВО в квазиоптической области отражения радиоволн, и расчету на их основе спектральной функции  , которая и будет представлять собой предполагаемый ДпП. Из полученной спектральной функции путем математических преобразований извлекают амплитуды
, которая и будет представлять собой предполагаемый ДпП. Из полученной спектральной функции путем математических преобразований извлекают амплитуды  и соответствующие им частоты
и соответствующие им частоты  спектральных составляющих предполагаемого ДпП.
спектральных составляющих предполагаемого ДпП.
Физический смысл проводимых математических операций заключается в том, что каждая комплексная сумма  Q значений ОХ, на основе которых был сформирован предварительный ДпП, является линейным предсказанием соответствующего значения, используемого для формирования корреляционной матрицы UP, которая в дальнейшем применяется для расчета коэффициентов
Q значений ОХ, на основе которых был сформирован предварительный ДпП, является линейным предсказанием соответствующего значения, используемого для формирования корреляционной матрицы UP, которая в дальнейшем применяется для расчета коэффициентов  , необходимых для формирования предполагаемого ДпП.
, необходимых для формирования предполагаемого ДпП.
Способ легко реализуем за счет обработки отраженных сигналов в цифровом виде и может быть рекомендован исследовательским коллективам, изучающим признаки идентификации или классификации объектов, формируемые методом спектрального анализа. Извлекаемые из ДпП признаки идентификации ВО могут быть использованы в существующих и перспективных радиолокационных станциях для классификации ВО как автономно в качестве векторного признака, так и в качестве дополнительного признака в совокупности с другими.
Источники информации
1. Селекция и распознавание на основе локационной информации / Под ред. А.Л. Горелика. М., Радио и связь, 1990. 240 с.
2. Радиолокационные характеристики летательных аппаратов / Под ред. Л.Т. Тучкова. М., Радио и связь, 1985. 236 с.
3. Штагер Е.А. Отражение радиоволн от кораблей и других морских объектов. СПб., ВВМ, 2004. 418 с.
4. Митрофанов Д.Г., Сафонов А.В., Прохоркин А.Г. Моделирование задачи распознавания целей по их радиолокационным изображениям нейросетевым способом. М., Радиотехника, 2007. №2. С. 3-9.
5. Митрофанов Д.Г. Комплексный адаптивный метод построения радиолокационных изображений в системах управления двойного назначения // Известия РАН. Теория и системы управления, 2006. №1. С. 101-118.
6. Радиолокационные системы. Справочник. Основы построения и теория / Под ред. Я.Д. Ширмана. М., Радиотехника, 2007. 510 с.
7. Митрофанов Д.Г. Развитие методов формирования доплеровских портретов и двумерных радиолокационных изображений воздушных целей // Оборонная техника, 1998. №10-11. С. 75-81.
8. Митрофанов Д.Г. Синтез радиолокационного изображения цели методом математического моделирования ее доплеровских портретов. Киев, Радиоэлектроника. Известия вузов, 1994. Т. 37. №3. С. 72-76.
9. Киселев В.К. Физическое моделирование электромагнитного рассеяния в квазиоптических направляющих структурах терагерцевого диапазона. Институт радиофизики и электроники им. А.Я. Усикова. НАН Украины. Интернет-статья. http://dspace.nbuv.gov.Ua/bitstream/handle/123456789/10761/7%20-%20Kisilev.pdf?sequence=1.
10. Майзельс Е.Н., Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей / Под ред. М.А. Колосова. М., Сов. радио, 1972. 232 с.
11. Мицмахер М.Ю., Торгованов В.А. Безэховые камеры СВЧ. М., Радио и связь, 1982. 128 с.
12. Патент РФ №2488135. G01S 13/10. Способ измерения эффективной поверхности рассеяния крупногабаритных массивных объектов в безэховой камере. Маюнов А.Т., Акиньпшна Г.Н., Авдеев А.Ю. и др. Опубл. 20.07.2013. Заявка №2011152402/07 от 21.12.2011. http://www.findpatent.ru/patent/248/2488135.html.
13. Митрофанов Д.Г. Методика экспериментального синтеза двумерных радиолокационных изображений. Киев, Радиоэлектроника. Известия вузов, 1996. Т. 39. №1. С. 71-75.
14. Митрофанов Д.Г. Влияние амплитудного и фазового шума на качество формирования радиолокационного изображения // Радиотехника и электроника, 1995. Т. 40. №4. С. 586-590.
15. Методы исследования радиолокационных характеристик объектов. Монография. Главы 7-8 / Под ред. С.В. Ягольникова. М., Радиотехника, 2012. 296 с.
16. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М., Радио и связь, 1984. 152 с.
17. Безгузиков В.П., Бондарев Н.Н., Чихонадских А.П. Получение радиоизображений объектов с помощью разнесенной фазометрической системы // Приборы и техника эксперимента, 1991. №5. С. 124-127 (аналог).
18. Марпл мл. СЛ. Цифровой спектральный анализ и его приложения. М., Мир, 1990. 584 с.
19. Бендат Дж., Пирсол А. Применение корреляционного и спектрального, анализа. Пер с англ. М., Мир, 1983. 312 с.
20. Патент РФ №2066059. МПК6 G01S 13/89. Способ построения двумерного радиолокационного изображения в РЛС сопровождения прямолинейно движущейся цели / Митрофанов Д.Г. БИ №24, 1996.
21. Патент РФ №2099742. МПК6 G01S 13/89. Триангуляционный способ построения двумерного радиолокационного изображения цели в РЛС сопровождения с инверсным синтезированием апертуры / Митрофанов Д.Г. БИ №35, 1997.
22. http://radiolocate.com/vibor_infom.
23. Митрофанов Д.Г., Прохоркин А.Г., Нефедов С.И. Измерение поперечных размеров летательных аппаратов по частотной протяженности доплеровского портрета // Радиотехника, 2008. №1. С. 84-90 (прототип).
24. Финкельштейн М.И. Основы радиолокации. М., Сов. радио, 1973. 496 с.
25. Баскаков С.И. Радиотехнические цепи и сигналы. М., Высшая школа, 2000. 462 с.
26. Вентцель Е.С. Теория вероятностей. М., Высшая школа, 2002. 575 с.
27. Кирьянов Д.В. Mathcad 13. СПб., БХВ-Петербург, 2006. 608 с.
28. Митрофанов Д.Г. Построение двумерного изображения объекта с использованием многочастотного зондирующего сигнала // Измерительная техника, 2001. №2. С. 57-62.
29. Шахтарин Б.И., Ковригин В.А. Методы спектрального оценивания случайных процессов. Научно-техническое издательство «Горячая линия-Телеком», 2011. 256 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета | 2018 |
|
RU2679396C2 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ВЫЯВЛЕНИЯ ЗАКОНА ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ ПОВОРОТА СОПРОВОЖДАЕМОГО ВОЗДУШНОГО ОБЪЕКТА ПО ПОСЛЕДОВАТЕЛЬНО ПРИНЯТЫМ ОТРАЖЕНИЯМ СИГНАЛОВ С ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2013 |
|
RU2525829C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ ВОЗДУШНОГО ОБЪЕКТА С ПОВЫШЕННОЙ ИНФОРМАТИВНОСТЬЮ НА УЧАСТКАХ ЕГО ПРОСТРАНСТВЕННО-УГЛОВОГО ЗАМИРАНИЯ | 2015 |
|
RU2603694C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| Способ построения панорамного радиолокационного изображения объекта | 2016 |
|
RU2629372C1 |
| Способ формирования дальностного портрета, получаемого на основе использования сигналов с перестройкой частоты, от импульса к импульсу, за счет построения характеристики изменения радиальной скорости воздушного объекта | 2023 |
|
RU2815730C1 |
Изобретение относится к радиолокационным методам и предназначено для извлечения из доплеровских портретов воздушных объектов (ДпП ВО) признаков идентификации, а именно частоты и амплитуды спектральных откликов, соответствующих рассеивающим центрам (РЦ) ВО. Достигаемый технический результат - высокая разрешающая способность по частоте, способствующая повышению информативности признаков идентификации, заключенных в структуре ДпП. Для достижения указанного результата методом линейного предсказания проводят проверку структуры ДпП ВО на возможное наличие в ней дополнительных спектральных составляющих, соответствующих РЦ на освещенной поверхности ВО, которые при проведении стандартной операции дискретного преобразования Фурье с комплексными значениями отражательной характеристики ВО по причине низкой разрешающей способности не выявляются. Данный способ позволяет в сформированных ДпП ВО наблюдать дополнительные спектральные отклики, что свидетельствует о повышении поперечного разрешения по частоте Доплера. 17 ил.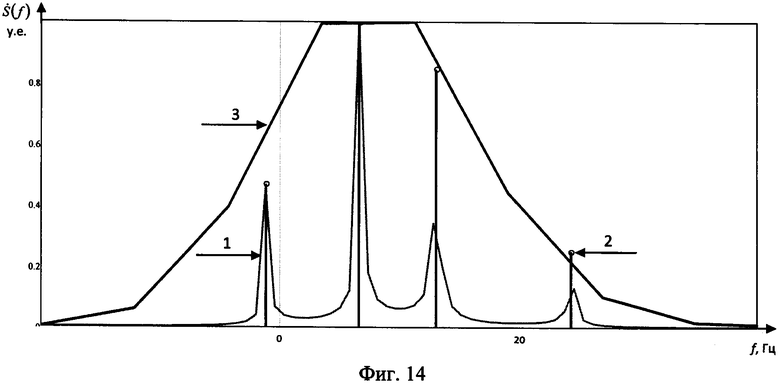
Способ извлечения из доплеровских портретов воздушных объектов признаков идентификации с использованием метода сверхразрешения, заключающийся в том, что в направлении воздушного объекта с помощью радиолокационной станции сопровождения излучают сверхвысокочастотные импульсные сигналы одинаковой частоты, принимают отраженные воздушным объектом сигналы, переводят радиолокационную станцию после обнаружения воздушного объекта в режим автоматического сопровождения по угловым координатам и дальности, определяют дальность D до воздушного объекта, дискретизируют с помощью аналого-цифрового преобразователя с периодом дискретизации Δt и записывают в память электронно-вычислительной машины амплитуду As и фазу φs s-x просочившихся в приемный тракт излученных сигналов, а также отраженных сигналов каждого i-го периода повторения, получая при этом в каждом периоде повторения S дискретных отсчетов, при этом учитывают, что в каждом периоде повторения в пределах длительности просочившегося зондирующего сигнала будет укладываться J дискретных отсчетов, проводят свертку принятых оцифрованных отраженных сигналов каждого i-го периода повторения с оцифрованным комплексно-сопряженным зондирующим сигналом этого же i-го периода повторения по формуле  , где
, где  - комплексные значения, получаемые после сжатия отраженного сигнала цифровым фильтром, соответствующие s-му отсчету отраженного сигнала в i-м периоде повторения; i=1…I; s=1…(S-J);
- комплексные значения, получаемые после сжатия отраженного сигнала цифровым фильтром, соответствующие s-му отсчету отраженного сигнала в i-м периоде повторения; i=1…I; s=1…(S-J);  ,
,  - значения амплитуды и фазы отраженного сигнала, соответствующие (s+j-1)-му отсчету продискретизированного отраженного сигнала в i-м периоде повторения импульсов;
- значения амплитуды и фазы отраженного сигнала, соответствующие (s+j-1)-му отсчету продискретизированного отраженного сигнала в i-м периоде повторения импульсов;  ,
,  - значения амплитуды и фазы излученного сигнала, соответствующие j-му отсчету продискретизированного зондирующего сигнала в i-м периоде повторения импульсов; I - количество периодов повторения зондирующих сигналов, укладывающееся на интервале регистрации данных, рассчитывают время прохождения излученного сигнала τво до воздушного объекта и обратно по формуле
- значения амплитуды и фазы излученного сигнала, соответствующие j-му отсчету продискретизированного зондирующего сигнала в i-м периоде повторения импульсов; I - количество периодов повторения зондирующих сигналов, укладывающееся на интервале регистрации данных, рассчитывают время прохождения излученного сигнала τво до воздушного объекта и обратно по формуле  , где с - скорость распространения электромагнитной волны, определяют предполагаемый номер отсчета g, на который при дальности D будет приходиться пик отраженного от воздушного объекта сигнала, по формуле
, где с - скорость распространения электромагнитной волны, определяют предполагаемый номер отсчета g, на который при дальности D будет приходиться пик отраженного от воздушного объекта сигнала, по формуле  , где round - операция округления значения до следующего целого числа; Δt - период дискретизации, в памяти электронно-вычислительной машины радиолокационной станции формируют массив отражений Hg, в первую строку которого записывают номера используемых при анализе отражений i-х периодов повторения, во вторую - амплитуды
, где round - операция округления значения до следующего целого числа; Δt - период дискретизации, в памяти электронно-вычислительной машины радиолокационной станции формируют массив отражений Hg, в первую строку которого записывают номера используемых при анализе отражений i-х периодов повторения, во вторую - амплитуды  g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженного от воздушного объекта сигнала в i-x периодах повторения, в третью - фазы
g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженного от воздушного объекта сигнала в i-x периодах повторения, в третью - фазы  g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженных сигналов в i-x периодах повторения, в четвертую - моменты времени ti=[(i-1)S+g+round(J/2)]Δt, соответствующие амплитудам
g-x отсчетов сжатого сигнала, которые соответствуют пикам откликов отраженных сигналов в i-x периодах повторения, в четвертую - моменты времени ti=[(i-1)S+g+round(J/2)]Δt, соответствующие амплитудам  и фазам
и фазам  сжатых отраженных от воздушного объекта сигналов в i-х периодах повторения, где Δt - период дискретизации, формируют зависимость из амплитудных значений
сжатых отраженных от воздушного объекта сигналов в i-х периодах повторения, где Δt - период дискретизации, формируют зависимость из амплитудных значений  массива Hg, которая графически представляет собой амплитудную отражательную характеристику воздушного объекта, из созданной зависимости, начиная с первого отсчета, последовательно извлекают выборки длительностью TL=0,5 с каждая, смещенные друг относительно друга на один отсчет, причем каждая выборка содержит N=round(TL/Ти) дискретных отсчетов, где Ти - период повторения импульсов, для каждой выборки формируют автокорреляционную функцию и определяют величину интервала корреляции τк (момент времени, когда автокорреляционная функция первый раз равна нулю), выбирают минимальную среди всех интервалов корреляции τк величину τк мин, определяют оценочное время корреляции τоц, равное величине порядка 0,5τк мин, начиная с первого отсчета, последовательно выделяют из массива Hg смещенные друг относительно друга на w=round(τоц/Ти) отсчетов d-e пары смежных выборок, учитывая, что d=1…round[(I-N)/w], рассчитывают с помощью амплитуд выделяемых d-x пар выборок коэффициенты корреляции zd по формуле
массива Hg, которая графически представляет собой амплитудную отражательную характеристику воздушного объекта, из созданной зависимости, начиная с первого отсчета, последовательно извлекают выборки длительностью TL=0,5 с каждая, смещенные друг относительно друга на один отсчет, причем каждая выборка содержит N=round(TL/Ти) дискретных отсчетов, где Ти - период повторения импульсов, для каждой выборки формируют автокорреляционную функцию и определяют величину интервала корреляции τк (момент времени, когда автокорреляционная функция первый раз равна нулю), выбирают минимальную среди всех интервалов корреляции τк величину τк мин, определяют оценочное время корреляции τоц, равное величине порядка 0,5τк мин, начиная с первого отсчета, последовательно выделяют из массива Hg смещенные друг относительно друга на w=round(τоц/Ти) отсчетов d-e пары смежных выборок, учитывая, что d=1…round[(I-N)/w], рассчитывают с помощью амплитуд выделяемых d-x пар выборок коэффициенты корреляции zd по формуле  , где yn+(d-1)w, yn+dw - амплитудные значения, соответствующие [n+(d-1)w]-му дискретному отсчету первой выборки и [n+dw]-му отсчету второй выборки в d-й паре соответственно; m1,d, m2,d - математические ожидания амплитудных значений отражательной характеристики в первой и во второй выборках d-й пары соответственно; σ1, σ2 - среднеквадратические отклонения амплитудных значений в первой и во второй выборках d-й пары соответственно, формируют в памяти электронно-вычислительной машины радиолокационной станции массив Hz, в первую строку которого записывают номера пар выборок d, во вторую - соответствующие им коэффициенты корреляции zd, формируют зависимость из значений коэффициентов корреляции zd массива Hz, которая графически представляет собой корреляционную характеристику воздушного объекта, проводят цифровым образом методом наименьших квадратов сглаживание сформированной корреляционной характеристики, то есть устраняют локальные максимумы и минимумы, оставляя только глобальные, определяют в сглаженной корреляционной характеристике такой ее участок между соседними глобальными максимумом и минимумом, на котором максимальное zd max и минимальное zd min значения коэффициента корреляции имеют наибольшее отличие, находят на этом участке точку корреляционной характеристики со значением коэффициента корреляции zd c, которое наиболее точно соответствует величине [(zd max-zd min)/2], используют эту точку как середину информативного интервала длительностью Тии=0,5 с, определяют по номеру zd с пары выборок отражательной характеристики соответствующий этой паре [round{(dc-1)w+[(N+w)/2]}]-й номер периода повторения в отражательной характеристике, где dc - номер пары выборки, соответствующий середине информативного интервала, находят номера отсчетов в отражательной характеристике, которые по времени сдвинуты относительно середины информативного интервала на 0,25 с по формулам
, где yn+(d-1)w, yn+dw - амплитудные значения, соответствующие [n+(d-1)w]-му дискретному отсчету первой выборки и [n+dw]-му отсчету второй выборки в d-й паре соответственно; m1,d, m2,d - математические ожидания амплитудных значений отражательной характеристики в первой и во второй выборках d-й пары соответственно; σ1, σ2 - среднеквадратические отклонения амплитудных значений в первой и во второй выборках d-й пары соответственно, формируют в памяти электронно-вычислительной машины радиолокационной станции массив Hz, в первую строку которого записывают номера пар выборок d, во вторую - соответствующие им коэффициенты корреляции zd, формируют зависимость из значений коэффициентов корреляции zd массива Hz, которая графически представляет собой корреляционную характеристику воздушного объекта, проводят цифровым образом методом наименьших квадратов сглаживание сформированной корреляционной характеристики, то есть устраняют локальные максимумы и минимумы, оставляя только глобальные, определяют в сглаженной корреляционной характеристике такой ее участок между соседними глобальными максимумом и минимумом, на котором максимальное zd max и минимальное zd min значения коэффициента корреляции имеют наибольшее отличие, находят на этом участке точку корреляционной характеристики со значением коэффициента корреляции zd c, которое наиболее точно соответствует величине [(zd max-zd min)/2], используют эту точку как середину информативного интервала длительностью Тии=0,5 с, определяют по номеру zd с пары выборок отражательной характеристики соответствующий этой паре [round{(dc-1)w+[(N+w)/2]}]-й номер периода повторения в отражательной характеристике, где dc - номер пары выборки, соответствующий середине информативного интервала, находят номера отсчетов в отражательной характеристике, которые по времени сдвинуты относительно середины информативного интервала на 0,25 с по формулам
iн=round{(dc-1)w+[(N+w)/2]}-round(0,25/Ти) и
iк=round{(dc-1)w+[(N+w)/2]}+round(0,25/Ти),
где iн - номер отсчета отражательной характеристики массива Hg, соответствующий началу информативного интервала; iк - номер отсчета отражательной характеристики массива Hg, соответствующий концу информативного интервала, создают в памяти электронно-вычислительной машины радиолокационной станции массив Ни, в первую строку которого записывают µ-e номера периодов повторения с 1-го по М-й, причем М=round(0,5/Ти), a µ-й номер в пределах массива Ни соответствует (iн+µ-1)-му номеру в исходной отражательной характеристике, во вторую - амплитуды  µ-x отсчетов отражательной характеристики, принадлежащих информативному интервалу, в третью - фазы
µ-x отсчетов отражательной характеристики, принадлежащих информативному интервалу, в третью - фазы  µ-x отсчетов отражательной характеристики, принадлежащих информативному интервалу, в четвертую - моменты времени tµ=(iн+µ-1)Ти, соответствующие амплитудам и фазам отраженных сигналов в µ-x периодах повторения, при этом первый элемент массива Ни соответствует началу информативного интервала, то есть iн-му элементу массива Hg, а последний элемент массива Ни соответствует концу информативного интервала, то есть iк-му элементу массива Hg, проводят операцию дискретного преобразования Фурье с комплексными значениями
µ-x отсчетов отражательной характеристики, принадлежащих информативному интервалу, в четвертую - моменты времени tµ=(iн+µ-1)Ти, соответствующие амплитудам и фазам отраженных сигналов в µ-x периодах повторения, при этом первый элемент массива Ни соответствует началу информативного интервала, то есть iн-му элементу массива Hg, а последний элемент массива Ни соответствует концу информативного интервала, то есть iк-му элементу массива Hg, проводят операцию дискретного преобразования Фурье с комплексными значениями  выборки, состоящей из 8-ми первых отсчетов массива Ни, в результате которой получают начальный низкоинформативный доплеровский спектр, определяют в полученном начальном низкоинформативном доплеровском спектре частоту Доплера
выборки, состоящей из 8-ми первых отсчетов массива Ни, в результате которой получают начальный низкоинформативный доплеровский спектр, определяют в полученном начальном низкоинформативном доплеровском спектре частоту Доплера  , которая соответствует максимальной составляющей спектра, определяют радиальную скорость воздушного объекта в начале информативного интервала
, которая соответствует максимальной составляющей спектра, определяют радиальную скорость воздушного объекта в начале информативного интервала  по формуле
по формуле  , где λ - длина волны излучаемого сигнала, проводят операцию дискретного преобразования Фурье с комплексными значениями выборки, состоящей из 8-ми последних отсчетов массива Hи, в результате которой получают конечный низкоинформативный доплеровский спектр, определяют в полученном конечном низкоинформативном доплеровском спектре частоту Доплера
, где λ - длина волны излучаемого сигнала, проводят операцию дискретного преобразования Фурье с комплексными значениями выборки, состоящей из 8-ми последних отсчетов массива Hи, в результате которой получают конечный низкоинформативный доплеровский спектр, определяют в полученном конечном низкоинформативном доплеровском спектре частоту Доплера  , которая соответствует максимальной составляющей спектра, определяют радиальную скорость воздушного объекта в конце информативного интервала
, которая соответствует максимальной составляющей спектра, определяют радиальную скорость воздушного объекта в конце информативного интервала  по формуле
по формуле  , определяют среднюю радиальную скорость
, определяют среднюю радиальную скорость  воздушного объекта в пределах информативного интервала инверсного синтезирования по формуле
воздушного объекта в пределах информативного интервала инверсного синтезирования по формуле  , определяют радиальное ускорение а
r воздушного объекта на выбранном информативном интервале по формуле
, определяют радиальное ускорение а
r воздушного объекта на выбранном информативном интервале по формуле  , рассчитывают на основе полученных значений средней радиальной скорости
, рассчитывают на основе полученных значений средней радиальной скорости  и ускорения а
r величину компенсируемой фазы для каждого tµ-го момента времени по формуле
и ускорения а
r величину компенсируемой фазы для каждого tµ-го момента времени по формуле  , проводят компенсацию фазового влияния радиального движения воздушного объекта на выбранном информативном интервале путем изменения фазы
, проводят компенсацию фазового влияния радиального движения воздушного объекта на выбранном информативном интервале путем изменения фазы  каждого µ-го элемента массива Ни на величину
каждого µ-го элемента массива Ни на величину  по формуле
по формуле  , где знак «-» соответствует движению воздушного объекта в направлении радиолокационной станции, т.е. приближению, а знак «+» соответствует удалению воздушного объекта, создают в памяти электронно-вычислительной машины радиолокационной станции массив Нс, в первую строку которого записывают номера периодов повторения с 1-го по М-й, во вторую - амплитуды
, где знак «-» соответствует движению воздушного объекта в направлении радиолокационной станции, т.е. приближению, а знак «+» соответствует удалению воздушного объекта, создают в памяти электронно-вычислительной машины радиолокационной станции массив Нс, в первую строку которого записывают номера периодов повторения с 1-го по М-й, во вторую - амплитуды  g-x отсчетов отражательной характеристики, принадлежащих информативному интервалу, в третью - скомпенсированные фазы
g-x отсчетов отражательной характеристики, принадлежащих информативному интервалу, в третью - скомпенсированные фазы  g-x отсчетов отражательной характеристики, принадлежащих информативному интервалу, в четвертую - моменты времени tµ, соответствующие амплитудам и фазам отраженных сигналов в µ-x периодах повторения, проводят операцию дискретного преобразования Фурье со всеми µ-ми комплексными величинами
g-x отсчетов отражательной характеристики, принадлежащих информативному интервалу, в четвертую - моменты времени tµ, соответствующие амплитудам и фазам отраженных сигналов в µ-x периодах повторения, проводят операцию дискретного преобразования Фурье со всеми µ-ми комплексными величинами  , составленными из элементов массива Нс, получают доплеровский портрет,
, составленными из элементов массива Нс, получают доплеровский портрет,
отличающийся тем, что полученный методом дискретного преобразования Фурье доплеровский портрет считают предварительным, то есть используемым лишь для определения предварительных параметров в структуре этого предварительного доплеровского портрета, определяют частоту, соответствующую его максимальному амплитудному значению, и используют эту частоту как предварительную оценку частоты  , определяют предполагаемое число гармоник Р в спектре идентифицируемого воздушного объекта, это число Р выбирают равным максимально возможному числу ярко выраженных рассеивающих центров на поверхности воздушного объекта в квазиоптической области отражения радиоволн, имеющему для крупноразмерного воздушного объекта величину порядка 10, а для среднеразмерного и малоразмерного воздушного объекта - не более 5, последовательно извлекают, начиная с первого элемента массива Нс, A=round(3P/2) выборок, состоящих из Q≈trunc(M/А) элементов и смещенных друг относительно друга на Q элементов, где trunc - операция округления значения до предыдущего целого числа, определяют комплексные суммы
, определяют предполагаемое число гармоник Р в спектре идентифицируемого воздушного объекта, это число Р выбирают равным максимально возможному числу ярко выраженных рассеивающих центров на поверхности воздушного объекта в квазиоптической области отражения радиоволн, имеющему для крупноразмерного воздушного объекта величину порядка 10, а для среднеразмерного и малоразмерного воздушного объекта - не более 5, последовательно извлекают, начиная с первого элемента массива Нс, A=round(3P/2) выборок, состоящих из Q≈trunc(M/А) элементов и смещенных друг относительно друга на Q элементов, где trunc - операция округления значения до предыдущего целого числа, определяют комплексные суммы  Q элементов массива Нс внутри каждой а-й выборки с дополнительным фазированием на частоте
Q элементов массива Нс внутри каждой а-й выборки с дополнительным фазированием на частоте  , соответствующие а-м частным выборкам, где а=1…А, по формуле
, соответствующие а-м частным выборкам, где а=1…А, по формуле  , создают в памяти электронно-вычислительной машины радиолокационной станции массив На, в первую строку которого записывают а-е номера выборок с 1-го по А-й, во вторую - комплексные суммы
, создают в памяти электронно-вычислительной машины радиолокационной станции массив На, в первую строку которого записывают а-е номера выборок с 1-го по А-й, во вторую - комплексные суммы  , формируют из А комплексных сумм
, формируют из А комплексных сумм  массива На для выбранного числа Р модифицированным ковариационным методом матрицу данных UP размерностью (Р+1)×[2(А-Р)] по формуле
массива На для выбранного числа Р модифицированным ковариационным методом матрицу данных UP размерностью (Р+1)×[2(А-Р)] по формуле
рассчитывают оценку корреляционной матрицы  размерностью [2(А-Р)]×[2(А-Р)], где
размерностью [2(А-Р)]×[2(А-Р)], где  - эрмитово-сопряженная матрица, соответствующая матрице UP, и составляют систему нормальных уравнений вида
- эрмитово-сопряженная матрица, соответствующая матрице UP, и составляют систему нормальных уравнений вида  , где cP - вектор из Р строк и одного столбца, включающий Р неизвестных коэффициентов;
, где cP - вектор из Р строк и одного столбца, включающий Р неизвестных коэффициентов;  - среднее значение квадратов ошибок линейного предсказания вперед и назад порядка Р;
- среднее значение квадратов ошибок линейного предсказания вперед и назад порядка Р;  - комплексное значение первой строки первого столбца матрицы R-1; R-1 - матрица, обратная матрице R; 0P - Р-элементный вектор-столбец, включающий нулевые значения, записывают ее в виде
- комплексное значение первой строки первого столбца матрицы R-1; R-1 - матрица, обратная матрице R; 0P - Р-элементный вектор-столбец, включающий нулевые значения, записывают ее в виде  , решают преобразованную систему относительно неизвестного вектора сР, получают оценки коэффициентов
, решают преобразованную систему относительно неизвестного вектора сР, получают оценки коэффициентов  ,
,  , …,
, …,  вектора сР, которые затем используют для вычисления спектральной функции, представляющей собой прототип доплеровского портрета, по формуле
вектора сР, которые затем используют для вычисления спектральной функции, представляющей собой прототип доплеровского портрета, по формуле  , где ƒ - текущая частота, соответствующая диапазону частот от -(0,5/Ти) до +(0,5/Ти), подсчитывают число локальных максимумов
, где ƒ - текущая частота, соответствующая диапазону частот от -(0,5/Ти) до +(0,5/Ти), подсчитывают число локальных максимумов  спектральной функции
спектральной функции  , которое может достигать предполагаемого числа составляющих Р в спектре идентифицируемого ВО, номер локального максимума в спектральной функции
, которое может достигать предполагаемого числа составляющих Р в спектре идентифицируемого ВО, номер локального максимума в спектральной функции  обозначают через
обозначают через  , соответствующие
, соответствующие  локальным максимумам частоты
локальным максимумам частоты  рассчитывают путем решения системы из
рассчитывают путем решения системы из  уравнений вида
уравнений вида

где  , рассчитывают фазовые множители
, рассчитывают фазовые множители  каждого а-го элемента массива Ha на частотах
каждого а-го элемента массива Ha на частотах  по формуле
по формуле  , формируют матрицу Ga фазовых множителей вида
, формируют матрицу Ga фазовых множителей вида 
составляют систему нормальных уравнений вида 
где  - неизвестная комплексная амплитуда, соответствующая
- неизвестная комплексная амплитуда, соответствующая  номеру локального максимума спектральной функции
номеру локального максимума спектральной функции  ;
;  - комплексное значение массива Ha, соответствующее его а-му элементу, записывают ее в виде
- комплексное значение массива Ha, соответствующее его а-му элементу, записывают ее в виде
где  - эрмитово-сопряженная матрица, соответствующая матрице Ga;
- эрмитово-сопряженная матрица, соответствующая матрице Ga;  - матрица, обратная матрице
- матрица, обратная матрице  , и решают составленную систему уравнений относительно неизвестных комплексных амплитуд
, и решают составленную систему уравнений относительно неизвестных комплексных амплитуд  , создают в памяти электронно-вычислительной машины радиолокационной станции массив признаков идентификации Нп, в первую строку которого записывают
, создают в памяти электронно-вычислительной машины радиолокационной станции массив признаков идентификации Нп, в первую строку которого записывают  номера составляющих в спектре идентифицируемого воздушного объекта, во вторую - частоты
номера составляющих в спектре идентифицируемого воздушного объекта, во вторую - частоты  , соответствующие положению этих составляющих, в третью - амплитуды
, соответствующие положению этих составляющих, в третью - амплитуды  , соответствующие частотам
, соответствующие частотам  , полученные в результате проведенных преобразований частотно-амплитудные пары
, полученные в результате проведенных преобразований частотно-амплитудные пары  , соответствующие локальным максимумам спектральной функции
, соответствующие локальным максимумам спектральной функции  , принимают в качестве признаков идентификации воздушного объекта.
, принимают в качестве признаков идентификации воздушного объекта.
| Митрофанов Д.Г и др | |||
| Измерение поперечных размеров летательных аппаратов по частотной протяженности доплеровского портрета | |||
| Радиотехника, 2008, N1, с.84-90 | |||
| Паровой трубчатый подогреватель вибрационного типа | 1959 |
|
SU130410A1 |
| Устройство для набора и взвешивания шихты вагон-весами доменной печи | 1951 |
|
SU95861A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1995 |
|
RU2095822C1 |
| JP 2005180970 A, 07.07.2005 | |||
| JP 2013210207 A, 10.10.2013 | |||
| US 5808577 A,15.09.1998. | |||

