Изобретение относится к радиолокационным методам и может быть использовано в системах классификации и идентификации воздушных объектов, использующих принцип усреднения признака принадлежности при изменении ракурса объекта, а также в системах построения радиолокационных изображений (РЛИ) объектов методом инверсного синтезирования апертуры.
В первых из указанных систем необходимо использовать интервал, в пределах которого сопровождаемый объект максимально изменяет свою ориентацию относительно линии визирования, а в системах построения РЛИ - интервал, на котором угловая скорость поворота объекта является следствием только (исключительно) перемещения центра масс по прямолинейной траектории и не связана с проявлением траекторных нестабильностей полета, т.е. рысканий, кренов и тангажных флюктуации планера.
Известен радиолокационный способ выявления закона изменения угловой скорости поворота 
Сущность этого способа выявления закона 
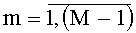
Первым импульсом в каждой последовательности с перестройкой частоты является импульс на частоте f0. После приема, перевода из аналоговой в цифровую форму и записи в ОЗУ параметров отраженных сигналов осуществляют формирование прямоугольного двумерного массива данных, именуемого матрицей многочастотно-синтезированного рассеяния (ММСР), для чего предварительно в пределах каждой последовательности СПНЧ осуществляют в ОЗУ перестановку зарегистрированных данных, обеспечивая их последовательное расположение в столбцах ММСР в порядке монотонного возрастания частоты от f0 до (f0+Fпер). В результате получают двумерный массив данных, столбцы которого расположены в соответствии с номерами излучаемых (и соответственно принимаемых) последовательностей СПНЧ, а данные в столбцах расположены не в порядке излучения по случайному закону, а в порядке монотонного изменения частоты излучения от f0 до (f0+Fпер). Таким образом, в каждой строке массива располагают амплитуды и фазы сигналов одинаковой частоты.
Данные об отраженных сигналах записывают в элементы ММСР в комплексном виде, а именно после приема каждой m-й пачки СПНЧ из амплитуды Δk и фазы φk k-го отраженного импульса формируют комплексное значение этого отраженного импульса в виде 
В результате получают (M-2N-1) коэффициентов корреляции (КК) ρ и соответствующих им моментов времени, которые запоминают в соответствующих элементах массива D1 ОЗУ. Анализируют информацию, записанную в массив D1, и находят в них момент времени, соответствующий минимальному КК или максимальному КК. В соответствии с физическим смыслом КК считают, что в момент времени, когда КК минимален, угловая скорость поворота ЛА 


Предложенный в [1] способ выявления закона 

Другим существенным недостатком способа-прототипа [1] является невозможность повышения отношения сигнал/шум за счет когерентного сложения сигналов перед формированием одночастотной отражательной характеристики ЛА в виде массива M12. Использование же часто повторяющихся пачек сигналов на частоте f0 еще больше снизит помехоустойчивость и увеличит длительность последовательности СПНЧ Тпосл, чем существенно усложнит обработку сигналов. В помехах и шумах отражательная характеристика ЛА на частоте f0 не сможет с выразительностью показывать моменты максимизации и минимизации

Задачей изобретения является разработка способа выявления закона изменения угловой скорости поворота ЛА относительно линии визирования при последовательном излучении фракций СПНЧ без организации более частого излучения одночастотных сигналов, так как такое излучение снижает помехоустойчивость перспективного многочастотного режима радиолокационного сопровождения и формирования РЛИ ЛА.
Для решения поставленной задачи предлагается использовать тот факт, что амплитудно-фазовые флюктуации сигналов, отраженных ЛА, становятся интенсивнее при увеличении угловой скорости поворота сопровождаемого ЛА. При этом другие факторы, влияющие на степень флюктуации радиолокационных отражений, должны быть нейтрализованы. К этим факторам относятся радиальное приближение (удаление) ЛА к радиолокационной станции (РЛС), турбовинтовая модуляция отраженных сигналов и наличие шумов (помех) произвольного происхождения. Следовательно, необходимо построить систему обработки отраженных сигналов так, чтобы максимально снизить влияние негативных факторов и эффективно выделить полезные флюктуации, связанные исключительно с поворотами ЛА относительно линии визирования РЛС.
В первую очередь, рассмотрим порядок устранения негативных факторов, а затем проверим возможность выделения интенсивности поворотов ЛА по соответствующей интенсивности амплитудно-фазовых флюктуации отраженных сигналов.
Известно [3, 4], что приближение или удаление объектов отражения радиоволн не влияет на амплитуду отраженных сигналов, но вносит фазовые добавки, кратные дробной части волнового числа 2π/λ, где λ - длина волны (для совмещенной РЛС за счет двойного хода электромагнитной волны речь должна идти о дробной части числа 4π/λ). Следовательно, на первом шаге необходимо вычислить радиальную скорость ЛА и устранить изменения фаз в принимаемых сигналах, связанные с изменением расстояния до ЛА.
Негативное влияние шумов и распределенных заградительных помех традиционно устраняется в современных РЛС на основе когерентного сложения принимаемых сигналов [3, 4]. В данном случае когерентное сложение (накопление) полезных сигналов и сопутствующее автоматическое повышение разрешающей способности по дальности предлагается осуществить методом проведения обратного быстрого преобразования Фурье (БПФ) с фракцией принятых отраженных от ЛА реализаций в пределах каждой последовательности СПНЧ. Перестановка сигналов в порядке монотонного увеличения несущей частоты (в пределах пачки СПНЧ со случайным законом изменения несущей частоты) позволяет сформировать в ОЗУ частотную характеристику ЛА, т.е. зависимость величины амплитуды и фазы отраженных сигналов от изменения частоты. Если объект на интервале облучения его последовательностью СПНЧ сохраняет относительное постоянство пространственного положения, то методом обратного БПФ из вектора частотной характеристики можно получить импульсную характеристику ЛА, как зависимость его отражательных свойств от изменения времени контакта радиолокационного сигнала сверхкороткой длительности (порядка наносекунд) постоянной амплитуды с элементами поверхности ЛА [5]. Импульсная характеристика ЛА с учетом скорости распределения волн (скорости света с) может быть пересчитана в дальностный портрет объекта, т.е. в зависимость отражательных свойств объекта от координаты радиальной дальности (вдоль линии визирования). При неизменности положения ЛА в течение Тпосл в дальностном портрете (ДлП) обеспечивается когерентное сложение отражений на разных частотах и повышается результирующее отношение сигнал-шум. То есть для обеспечения помехоустойчивости целесообразно выделять информацию об угловой скорости поворота
Для устранения фазовых сдвигов, связанных с радиальным движением ЛА, может использоваться рекуррентный алгоритм вычитания из фазы принятого сигнала фазового компонента, обусловленного исключительно изменением расстояния до ЛА. Рекуррентность нужна в случае использования вобуляции частоты повторения импульсов. Если же период повторения постоянен, то компенсацию можно проводить по универсальной формуле, приведенной в [6-8]. Однако оба эти подхода предполагают знание радиальной скорости движения ЛА, вычисляемой на предварительном этапе стандартным методом в режиме одночастотного зондирования [7].
В данном же случае применение излучения одночастотных сигналов предложено исключить из соображений повышения помехоустойчивости режима сопровождения. Поэтому для устранения фазовых набегов радиального характера в данном случае уместно использование способа, описанного в [8, 9]. Этот способ построения информативного дальностного портрета и оценки радиальной скорости ЛА сам основан на компенсации рассматриваемых фазовых сдвигов, обусловленных его радиальным движением. Поскольку данный способ достаточно подробно описан в [9], то нет необходимости подробно излагать его сущность. Предлагается в рамках данного изобретения считать применение способа [9] целесообразным, эффективным, доказанным и называть его способом компенсации «дальностных» фазовых набегов (т.е. связанных с изменением дальности до ЛА) методом минимума энтропии.
Третий негативный фактор, связанный с проявлением турбовинтового эффекта (ТВЭ), устраняется за счет использования предлагаемого способа изменения частоты зондирования в пределах каждой последовательности СПНЧ по случайному закону. Случайное изменение частоты зондирующих сигналов в пачках нарушает закономерный характер проявления в параметрах отражений турбовинтовой модуляции и как следствие ведет к «размазыванию» потенциально возможных ложных турбовинтовых составляющих в структуре формируемых дальностных портретов.
Таким образом, устранение негативных для выявления закона 
1) применения в пачках СПНЧ случайного закона перестройки;
2) когерентного сложения отражений от элементов конструкции ЛА методом обратного БПФ с его частотной характеристикой;
3) устранения дальностных фазовых набегов в процессе формирования ДлП объекта методом минимума энтропии в соответствии со способом [9].
Для выявления (выделения) закона изменения угловой скорости
Предшествующее построению траекторной характеристики формирование ДлП ЛА предлагается осуществить после излучения и приема отраженных от ЛА пачек СПНЧ. В излучаемых пачках используемые частоты зондирующих сигналов должны подчиняться случайному закону, не повторяющемуся от пачки к пачке. Причем в данном случае сигналы на частоте f0 не являются исключением.
При линейном изменении несущей частоты в пачке СПНЧ частота первого импульса (первая частота) равна f1=f0, частота второго импульса (вторая частота) равна f2=f0+Δf, частота третьего импульса (третья частота) равна f3=f0+2Δf и так далее, так что частота K-го импульса (K-я частота) равна fK=f0+(K-1)Δf, где Δf - щаг перестройки (интервал изменения) частоты между смежными по номеру импульсами. Если все К частот являются априори известными, то можно расположить импульсы разных частот в пачке хаотично, по случайному закону, причем закон должен обязательно изменяться от пачки к пачке [1].
Длительность пачек Тпосл не должна превышать 5 мс. В этом случае перемещением ЛА на интервале излучения всех импульсов пачки можно пренебречь. Величину 5 мс принято называть интервалом истинной когерентности, т.е. интервалом, на котором полученные от объекта отраженные сигналы являются когерентными вследствие неподвижности объекта.
После приема каждой m-й пачки СПНЧ из амплитуды Ak и фазы φk k-го отраженного импульса формируют комплексное значение этого отраженного сигнала 
В целях снижения степени влияния вредных шумов и устранения фазовых искажений, связанных с радиальным движением ЛА, с каждым вектором-столбцом ИММСР проводят операцию обратного БПФ в сочетании с компенсацией «дальностных» фазовых набегов методом минимума энтропии [9]. За счет когерентного сложения отражений на разных частотах повышается результирующее отношение сигнал-шум и формируется ДлП ЛА, соответствующий варианту гипотетической остановки ЛА в пространстве, иначе говоря, - варианту отсутствия радиального перемещения ЛА. Сформированный в m-м столбце ДлП 

Из векторов дальностных портретов ЛА в ОЗУ РЛС формируют двумерную избыточную дальностно-временную матрицу рассеяния (ИДВМР), заменяя в ИММСР каждый m-й столбец отражений на разных частотах на соответствующий m-й вектор дальностного портрета. Аналитически ИДВМР 

где Hm - амплитуда импульсного отклика в m-м дальностном портрете в k-м элементе разрешения по дальности [5-7], ξkm - фаза импульсного отклика в m-м дальностном портрете в k-м элементе разрешения по дальности, полученная после проведения обратного БПФ с вектором отражений от воздушного объекта m-й пачки СПНЧ.
В k-й строке ИДВМР 

В первом по счету дальностном портрете ЛА путем сравнения модулей его элементов 





В ИДВМР
Следующим (основным) этапом выявления закона 

где 


Тем самым вычисляется усредненное по всем значащим информативным элементам дальности значение разности между косинусными составляющими смежных дальностных портретов и синусными составляющими смежных ДлП, в данном случае смежными считаются m-й и (m+1)-й ДлП.
Из m-х значений, вычисленных но формуле (4), формируется полная ТХ ЛА, включающая (M-1) элементов.
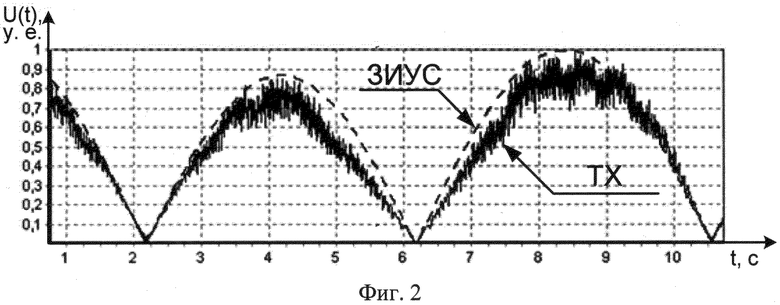
Графическая интерпретация траекторной характеристики ЛА, полученной методом математического моделирования, представлена на фиг.2. Пунктиром на фиг.2 обозначен истинный закон изменения угловой скорости (ЗИУС) ЛА, находящегося на дальности 30 км, высоте 1 км, движущегося со скоростью 100 м/с под курсовым углом 30° с рысканиями планера амплитудой 2° и средней угловой скоростью рыскания 
Как видно из фиг.2, изрезанность сформированной изначально ТХ слишком сильна, что не позволяет проводить ее автоматизированный анализ. Для сглаживания ТХ предлагается использовать метод скользящего среднего на основе расчетов каждого m-го сглаженного значения ТХ по формуле

где число отсчетов Mчв частной выборки, выделенной из генеральной выборки, определяется по формуле

исходя из того, что время набора отсчетов в частную выборку не должно превышать четверти минимального периода TTH min рысканий при траекторных нестабильностях полета ЛА в турбулентной атмосфере, а также из того, что отсчеты в ТХ следуют через период времени, равный длительности пачки СПНС Tпосл. В данном случае предлагается использовать пятую часть минимального периода рысканий планера TTH min, составляющего величину порядка 1 с.
Для формирования более качественной, ровной, пригодной для автоматизированного анализа сглаженной ТХ предлагается повторять процесс сглаживания исходной ТХ воздушного объекта 5 раз.
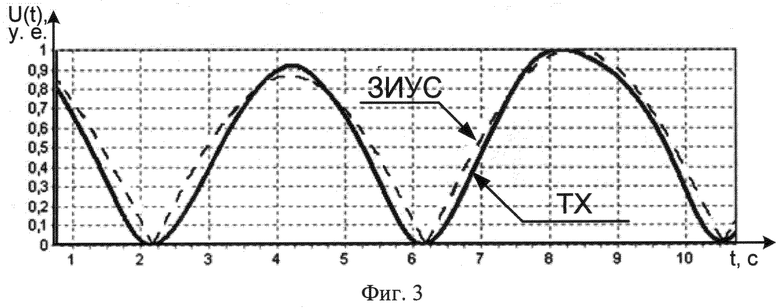
Графический вид сглаженной траекторной характеристики, соответствующей исходной ТХ (фиг.2), показан на фиг.3. Как видно, эта ТХ вполне пригодна для определения интервалов с максимальной, минимальной и средней угловой скоростью поворота ЛА относительно линии визирования. Аналитически сглаженную ТХ можно выразить объединением ее элементов 
Для выявления закона

Предложенный способ является более эффективным по сравнению с прототипом [1], так как он не требует более частого излучения сигналов на основной частоте f0, а также анализирует информацию о сопровождаемом ВО лишь после когерентного суммирования сигналов в ДлП, т.е. менее чувствителен к помехам и шумам приемника. Способ рекомендуется к использованию в радиолокационных системах классификации ВО, требующих усреднения признаков классификации по ракурсу, а также в системах формирования РЛИ ВО для определения наиболее информативных интервалов инверсного синтезирования.
Источники информации
1. Патент РФ №2234110. Способ построения двумерного радиолокационного изображения воздушной цели. Митрофанов Д.Г., Бортовик В.В. и др. Заявка №2003100255. БИПМ №22 от 10.08.2004. С.546-548 (прототип).
2. Митрофанов Д.Г., Прохоркин А.Г., Нефедов С.И. Измерение поперечных размеров летательных аппаратов по частотной протяженности доплеровского портрета // Радиотехника. 2008 №1. С.84-90.
3. Теоретические основы радиолокации / Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970. - 560 с.
4. Финкельштейн М.И. Основы радиолокации. Учебник для вузов. - М.: Сов. радио, 1973. - 496 с.
5. Митрофанов Д.Г. Формирование двумерного радиолокационного изображения цели с траекторными нестабильностями полета // Радиотехника и электроника. РАН, 2002. №7. С.852-859.
6. Митрофанов Д.Г. Комплексный адаптивный метод построения радиолокационных изображений в системах управления двойного назначения // Теория и системы управления. Известия РАН. 2006. №1-2. С.101-118.
7. Митрофанов Д.Г. Метод построения радиолокационных изображений аэродинамических летательных аппаратов // Полет. 2006. №11. С 52-60.
8. Майоров Д.А., Савостьянов В.Ю., Митрофанов Д.Г. Измерение радиальной скорости воздушных объектов в режиме перестройки частоты // Измерительная техника. 2008. №2. С 43-47.
9. Патент №2326402 от 10.06.2008. Способ измерения радиальной скорости воздушной цели в режиме перестройки частоты от импульса к импульсу. Савостьянов В.Ю., Майоров Д.А., Прохоркин А.Г., Митрофанов Д.Г. Опубл. 10.06.2008. БИПМ №16. Часть III. С.752.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ ПО СЛУЧАЙНОМУ ЗАКОНУ ПРИ ПОНИЖЕННОМ ОТНОШЕНИИ СИГНАЛ-ШУМ | 2008 |
|
RU2389039C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ ВОЗДУШНОГО ОБЪЕКТА С ПОВЫШЕННОЙ ИНФОРМАТИВНОСТЬЮ НА УЧАСТКАХ ЕГО ПРОСТРАНСТВЕННО-УГЛОВОГО ЗАМИРАНИЯ | 2015 |
|
RU2603694C1 |
| Способ формирования дальностного портрета повышенной информативности на основе использования сигналов с перестройкой частоты от импульса к импульсу | 2023 |
|
RU2808449C1 |
| Способ формирования дальностного портрета, получаемого на основе использования сигналов с перестройкой частоты, от импульса к импульсу, за счет построения характеристики изменения радиальной скорости воздушного объекта | 2023 |
|
RU2815730C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ МАЛОРАЗМЕРНОГО ВОЗДУШНОГО ОБЪЕКТА В ВИДЕ РАДИАЛЬНОГО УСКОРЕНИЯ ДВИЖЕНИЯ ДЛЯ РЕЖИМА СОПРОВОЖДЕНИЯ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2392640C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОГО ОБЪЕКТА В РЕЖИМЕ ХАОТИЧНОЙ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ ПРИ ОГРАНИЧЕННОМ КОЛИЧЕСТВЕ ИСПОЛЬЗУЕМЫХ ЧАСТОТ | 2010 |
|
RU2427003C2 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ДЛЯ РЕЖИМА ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2014 |
|
RU2541504C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
Изобретение может быть использовано в системах классификации и идентификации воздушных объектов (ВО), использующих принцип усреднения признака принадлежности при изменении ракурса объекта, а также в системах построения радиолокационных изображений объектов методом инверсного синтезирования апертуры. Достигаемый технический результат - повышение помехоустойчивости перспективного многочастотного режима радиолокационного сопровождения и формирования радиолокационных изображений объектов. Указанный результат достигается за счет того, что формируют и используют траекторную характеристику, которая представляет собой зависимость, показывающую изменение суммы разностей комплексных амплитуд смежных дальностных портретов от номера портрета, то есть от времени приема очередной фракции сигналов с перестройкой несущей частоты, при этом для построения более качественной траекторной характеристики воздушного объекта предлагается пятикратно сглаживать исходную характеристику методом скользящего среднего. 3 ил.
Радиолокационный способ выявления закона изменения угловой скорости поворота сопровождаемого воздушного объекта по последовательно принятым отражениям сигналов с перестройкой несущей частоты, заключающийся в том, что в направлении воздушного объекта излучают последовательности сигналов с перестройкой несущей частоты из 2N импульсов (N=8,9) каждая, частоту этих импульсов изменяют от импульса к импульсу в диапазоне от f0 до (f0+Fпер), где f0 - начальная несущая частота квазиоптической области отражения сантиметрового диапазона, Fпер - диапазон, в котором осуществляется перестройка частоты от импульса к импульсу с интервалом Δf=Fпер/(2N-1), принимают отраженные от воздушного объекта сигналы, по принятым отраженным сигналам сопровождают воздушный объект по угловым координатам и дальности, записывают в оперативное запоминающее устройство амплитуды и фазы, а также номер и время приема отраженных сигналов с перестройкой несущей частоты, причем запись этих данных проводят на интервале времени Т3, на порядок превышающем величину 22NTи, где Ти - период повторения импульсов, а излучение каждой последовательности сигналов с перестройкой несущей частоты из 2N импульсов проводят в течение интервала времени Тпосл, не превышающего 5 мс, т.е. в течение времени, на порядок меньшего продолжительности интервала корреляции траекторных нестабильностей полета воздушного объекта, при этом частоту импульсов каждой последовательности сигналов с перестройкой несущей частоты из 2N импульсов изменяют исходя из условия, чтобы в пределах каждой 2N-импульсной последовательности частота каждого импульса повторялась только один раз, после приема, перевода из аналоговой в цифровую форму и записи в оперативное запоминающее устройство параметров отраженных сигналов осуществляют формирование прямоугольного двумерного массива данных, именуемого матрицей многочастотно-синтезированного рассеяния, для чего предварительно в пределах каждой последовательности сигналов с перестройкой несущей частоты осуществляют в оперативном запоминающем устройстве перестановку зарегистрированных данных, обеспечивая их последовательное расположение в столбцах матрицы многочастотно-синтезированного рассеяния в порядке монотонного возрастания частоты от f0 до (f0+Fпер), в результате получают двумерный массив данных, столбцы которого расположены в соответствии с номерами излучаемых и соответственно принимаемых последовательностей сигналов с перестройкой несущей частоты, а данные в столбцах расположены в порядке монотонного изменения частоты излучения от f0 до (f0+Fпер), таким образом, в каждой строке массива располагают амплитуды и фазы отраженных сигналов одинаковой частоты, данные о параметрах отраженных сигналов записывают в элементы матрицы многочастотно-синтезированного рассеяния в комплексном виде, а именно после приема каждой m-й пачки сигналов с перестройкой несущей частоты из амплитуды Аk и фазы φk k-го отраженного импульса формируют для записи комплексное значение этого отраженного импульса в виде  ,
,
отличающийся тем, что при формировании матрицы многочастотно-синтезированного рассеяния используют число М столбцов в ней, подчиненное неравенству M>>22N, а число строк К оставляют равным K=2N, сформированную при таких условиях матрицу многочастотно-синтезированного рассеяния именуют избыточной матрицей многочастотно-синтезированного рассеяния, каждому элементу сформированной избыточной матрицы многочастотно-синтезированного рассеяния присваивают индексы k и m, где k - номер строки, a m - номер столбца избыточной матрицы многочастотно-синтезированного рассеяния, таким образом комплексное значение отраженного сигнала в m-м столбце k-й строки избыточной матрицы многочастотно-синтезированного рассеяния получает обозначение  , где Аkm и φkm - соответственно амплитуда и фаза отраженного сигнала, принятого в m-й последовательности сигналов с перестройкой несущей частоты на k-й частоте, после перестановки данных в каждом m-м столбце в порядке монотонного возрастания несущей частоты проводят с вектором комплексных данных этого столбца избыточной матрицы многочастотно-синтезированного рассеяния операцию обратного быстрого преобразования Фурье в сочетании с компенсацией дальностных фазовых набегов методом минимума энтропии, в результате из каждого m-го столбца избыточной матрицы многочастотно-синтезированного рассеяния получают m-й вектор комплексных чисел
, где Аkm и φkm - соответственно амплитуда и фаза отраженного сигнала, принятого в m-й последовательности сигналов с перестройкой несущей частоты на k-й частоте, после перестановки данных в каждом m-м столбце в порядке монотонного возрастания несущей частоты проводят с вектором комплексных данных этого столбца избыточной матрицы многочастотно-синтезированного рассеяния операцию обратного быстрого преобразования Фурье в сочетании с компенсацией дальностных фазовых набегов методом минимума энтропии, в результате из каждого m-го столбца избыточной матрицы многочастотно-синтезированного рассеяния получают m-й вектор комплексных чисел  , называемый иными словами m-м дальностным портретом воздушного объекта или вектором m-го дальностного портрета, из векторов полученных дальностных портретов в порядке возрастания их номеров формируют избыточную дальностно-временную матрицу рассеяния с М столбцами и К строками, имеющую аналитическую запись вида
, называемый иными словами m-м дальностным портретом воздушного объекта или вектором m-го дальностного портрета, из векторов полученных дальностных портретов в порядке возрастания их номеров формируют избыточную дальностно-временную матрицу рассеяния с М столбцами и К строками, имеющую аналитическую запись вида
 ,
,
где Нkm - амплитуда импульсного отклика в m-м дальностном портрете в k-м элементе разрешения по дальности, ξkm - фаза импульсного отклика в m-м дальностном портрете в k-м элементе разрешения по дальности, полученная после проведения обратного быстрого преобразования Фурье с вектором отражений от воздушного объекта m-й пачки сигналов с перестройкой несущей частоты, определяют величину порогового уровня Нп путем нахождения среднего, по всей избыточной дальностно-временной матрице рассеяния, значения модуля элемента матрицы по формуле
 ,
,
сравнивают величины модулей элементов первого столбца избыточной дальностно-временной матрицы рассеяния с величиной Нп и в случае выполнения условия  элементы k-й строки избыточной дальностно-временной матрицы рассеяния оставляют без изменения, в противном же случае обнуляют все элементы k-й строки этой матрицы, формируют траекторную характеристику воздушного объекта как зависимость, показывающую изменение суммы разностей комплексных амплитуд смежных дальностных портретов в соответствии с изменением номера дальностного портрета, для этого рассчитывают m-е значение траекторной характеристики воздушного объекта по формуле
элементы k-й строки избыточной дальностно-временной матрицы рассеяния оставляют без изменения, в противном же случае обнуляют все элементы k-й строки этой матрицы, формируют траекторную характеристику воздушного объекта как зависимость, показывающую изменение суммы разностей комплексных амплитуд смежных дальностных портретов в соответствии с изменением номера дальностного портрета, для этого рассчитывают m-е значение траекторной характеристики воздушного объекта по формуле  где
где  и
и  - соответственно косинусная
- соответственно косинусная  и синусная
и синусная  квадратурные составляющие k-го элемента разрешения по дальности в m-м дальностном портрете,
квадратурные составляющие k-го элемента разрешения по дальности в m-м дальностном портрете,  - порядковый номер дальностного портрета или вектора-столбца в избыточной дальностно-временной матрице рассеяния, пять раз подряд проводят процедуру сглаживания траекторной характеристики воздушного объекта, для чего предварительно определяют число элементов Мчв частной выборки, представляющей собой взятые подряд элементы траекторной характеристики воздушного объекта, по формуле
- порядковый номер дальностного портрета или вектора-столбца в избыточной дальностно-временной матрице рассеяния, пять раз подряд проводят процедуру сглаживания траекторной характеристики воздушного объекта, для чего предварительно определяют число элементов Мчв частной выборки, представляющей собой взятые подряд элементы траекторной характеристики воздушного объекта, по формуле  , где TTHmin - минимальный период рысканий планера воздушного объекта при траекторных нестабильностях полета в турбулентной атмосфере, составляющий величину порядка 1 с, а затем определяют m-е значение сглаженной траекторной характеристики воздушного объекта по формуле
, где TTHmin - минимальный период рысканий планера воздушного объекта при траекторных нестабильностях полета в турбулентной атмосфере, составляющий величину порядка 1 с, а затем определяют m-е значение сглаженной траекторной характеристики воздушного объекта по формуле
 ,
,
пятикратно сглаженную траекторную характеристику воздушного объекта используют в качестве закона изменения угловой скорости поворота сопровождаемого воздушного объекта с течением времени с учетом того, что время излучения Тизл m m-й последовательности сигналов с перестройкой несущей частоты связано с соответствующим номером uсгл m сглаженной траекторной характеристики воздушного объекта выражением Тизл m≈Тпосл(m+Мчв/2).
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ | 2003 |
|
RU2234110C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНОГО РАДИОЛОКАЦИОННОГО ОБЪЕКТА НАБЛЮДЕНИЯ С ВЫБОРОМ ИНТЕРВАЛА МАКСИМИЗАЦИИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ПРИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЯХ ДВИЖЕНИЯ | 2010 |
|
RU2427001C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| СПОСОБ ПОВЫШЕНИЯ ДОСТОВЕРНОСТИ РАСПОЗНАВАНИЯ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2231082C2 |
| Устройство для набора и взвешивания шихты вагон-весами доменной печи | 1951 |
|
SU95861A1 |
| WO 2005069197 A1, 28.07.2005 | |||
| WO 2006133268 A2, 14.12.2006 | |||
| US 4751511 A, 14.06.1988 | |||
| WO 1989007744 A, 24.08.1989 | |||

